Фиг.1
Предлагаемое изобретение относится к управлению электроприводами одноковшовых экскаваторов и может быть использовано для управления электроприводами кранов и других машин, режимы работы ко- торых зависят от применяемых на предприятиях технологических схем и изменяются при изменении последних.
Известен способ управления механизмом поворота экскаватора путем задания перемещения механизма, сопоставления его с текущим перемещением, управления перемещением механизма поворота экскаватора пропорционально величине рассогласования между ними, дополнительного задания первого и второго пороговых значений перемещения, сопоставления их с заданным и при превышении заданного перемещения над первым пороговым значением увеличения максимальной скорости двигателя пропорционально заданному перемещению при одновременном в такой же степени уменьшении значения стопорного гока якорной цепи, а при превышении заданного перемещения над вторым пороге- вым значением увеличения максимальной скорости двигателя и уменьшения стопорного тока его якорной цепи до расчетных постоянных величин.
Устройство для реализации этого спосо- ба содержит задатчик положения, регулятор положения, регулятор скорости, регулятор тока, управляемый преобразователь, двигатель, датчик тока, датчик скорости, датчик положения, блок выделения модуля переме- щения, корректор уровня скорости и корректор уровня тока.
Недостаток этого способа управления заключается в том, что он может быть применен только в системах автоматического управления, замкнутых по перемещению, в то время как практически все системы управления, применяемые на экскаваторах, не содержат контуров регулирования по перемещению. Недостатком устройства, pea- лизующего этот способ, является завышенная в два раза по сравнению с установочной мощностью двигателей мощность управляемого преобразователя, так как она должна быть рассчитана по макси- мальным значениям напряжения и тока.
Известен также способ управления электроприводом, заключающийся в том. что ослабление магнитного поля возбуждения осуществляется в функции скорости вращения двигателя. Устройство реализующее этот способ, выполнено по принципу подчиненного регулирования параметров и содержит внутренний контур регулирования магнитного потока двигателя, замкнутый через датчик этого потока, и внешний контур регулирования скорости, замкнутый через датчик скорости.
Основным недостатком таких систем управления, относящихся к классу систем двухзонного регулирования с зависимым управлением потоком возбуждения в функции скорости электропривода, является сложность структурной реализации, а также обязательное наличие датчика скорости, в качестве которого в большинстве случаев применяются тахогенераторы, вносящие в систему трудно устраняемую нестабильность из-за оборотных и коммутационных пульсаций. В экскаваторных электроприводах по ряду причин в том числе из-за тяжелых условий эксплуатации,тахогенераторы не нашли практического применения.
Наиболее близким по технической сущности к предлагаемому изобретению является способ управления электроприводом, заключающийся в задании скорости вращения электропривода в цикле и порогового значения скорости вращения, сопоставлении текущей скорости вращения с заданной, регулировании скорости путем изменения напряжения при постоянном значении магнитного потока электродвигателя, ограничении максимального значения тока якорной цепи в диапазоне от нуля до порогового значения скорости, регулировании скорости путем ослабления магнитного потока при постоянном значении ЭДС электродвигателя, ограничении максимальных значений тока якорной цепи и скорости при превышении текущей скорости вращения электропривода над пороговым значением
Устройство, реализующее данный способ, включает задатчик интенсивности и два контура подчиненного регулирования параметров, первый из которых состоит из регулятора и датчика ЭДС, регулятора и датчика тока и управляемого преобразователя, к выходу которого подключен якорь двигателя, а второй - из источника постоянного напряжения, регулятора и датчика потока, регулятора и датчика тока возбуждения, к выходу которого подключена обмотка возбуждения двигателя. Входы обоих контуров регулирования соединены с задатчиком интенсивностичерезсоответствующиепараметрические нелинейные элементы, с помощью которых и осуществляется раздельное управление контурами Нелинейный элемент, имеющий характеристику с ограничением, включенный между задатчиком интенсивности и регулятором ЭДС, служит для ограничения значения входного напряжения регулятора ЭДС до уровня, соответствующего пороговому значению скорости электропривода. В качестве порогового значения обычно принимается номинальнаяскоростьвращенияэлектродвигателя. Нелинейный элемент с характеристикой типа Зоны нечувствительности, включенный между задатчиком интенсивности и регулятором потока, пропускает сигнал в контур регулирования потока только после достижения двигателем пороговой скорости вращения,
Недостатком этого способа и реализующего его устройства является отсутствие адаптации параметров системы к изменяющимся технологическим и горно-геологическим условиям эксплуатации экскаватора. Целесообразность такой адаптации вызывается тем, что она позволяет поддерживать заданный коэффициент тепловой загрузки электродвигателя, увеличивая тем самым срок службы последнего. Снижение величины стопорного тока ведет к уменьшению динамических нагрузок в металлоконструкциях и следовательно к увеличению их надежности. Увеличение максимальной скорости электропривода минимизирует длительность перемещения рабочих органов, увеличивая производительность экскаватора. Наложенное ограничение на возрастание максимальных значений стопорного тока и скорости по условию коммутационного нарушения на уровне 10% позволяет поддерживать удовлетворительное качество коммутации при повышении скорости двигателя и следовательно увеличивает надежность щеточно-коллекторного узла.
Цель изобретения - повышение производительности и надежности экскаватора путем адаптации электропривода к горног технологическим условиям эксплуатации.
Поставленная цель достигается тем, что согласно способу управления электроприводом экскаватора задают три пороговых значения перемещения, измеряют действительные значения перемещений в каждом цикле и вычисляют их среднее значение за п последних циклов, сравнивают среднее значение перемещения за п последних циклов с заданными пороговыми значениями перемещений. При этом при превышении среднего значения перемещения над первым пороговым значением уменьшают уровень тока стопорения до величины, определяемой коэффициентом тепловой загрузки двигателя электропривода, равному единице, с одновременным увеличением максимального уровня задания скорости пропорционально среднему значению перемещения. При повышении среднего значения перемещения над вторым пороговым
значением увеличивают уровень тока стопорения пропорционально среднему значению перемещения, а при превышении среднего значения перемещения над третьим пороговым значением поддерживают величину тока стопорения на допустимом уровне коммутации при одновременном поддержании уровня максимальной скорости на допустимой величине.
0 Устройство для управления электроприводом экскаватора, содержащее командо- аппарат, задатчик интенсивности, выход которого подключен к входам первого и второго нелинейных элементов, выход первого
5 нелинейного элемента подключен к первому входу регулятора ЭДС, выход которого подключен к первому входу регулятора тока, к второму входу которого подключен датчик тока якоря двигателя, а выход регулятора
0 тока подключен к входу преобразователя напряжения якоря двигателя, датчик ЭДС, выход которого подключен к второму входу регулятора ЭДС, выход второго нелинейного элемента подключен к первому входу бло5 ка управления магнитным потоком, к второму входу которого подключен источник опорного напряжения, выход блока управления магнитным потоком подключен к пре- образователю напряжения обмотки
0 возбуждения,а выход датчика тока возбуждения подключен к третьему входу блока управления магнитным потоком, снабжено блоками выделения цикла и вычисления среднего значения перемещения, датчиком
5 перемещения, блоками коррекции значений максимальной скорости и тока стопорения, третьим и четвертым нелинейными элементами. При этом выход третьего нелинейного элемента подключен к первому вхо0 ду блока коррекции значений максимальной скорости, к второму входу которого подключен командоаппарат, а выход блока коррекции максимальной скорости подключен к входу задатчика интенсивности, датчик пе5 ремещения подключен к первому входу вычисления среднего значения перемещения, к второму входу которого подключен блок выделения цикла, а выход блока вычисления среднего значения перемещения подклю0 чен к входам третьего и четвертого нелиней- ных элементов, выход четвертого нелинейного элемента подключен к первому входу блока коррекции значений тока стопорения, выход которого подключен к
5 третьему входу регулятора ЭДС, выход которого подключен к другому входу блока коррекции значений тока стопорения.
При работе электропривода в диапазоне между первым и вторым пороговыми значениями перемещения осуществляется
оптимизация его перемещения по быстродействию с учетом ограничения по тепловой загрузке двигателя. Для увеличения быстродействия увеличивают уровень максимальной скорости пропорционально среднему значению перемещения за п последних циклов, а для ограничения коэффициента тепловой загрузки на единичном уровне уменьшают значение стопорного тока якорной цепи до первой расчетной постоянной величины.
При работе электропривода в диапазоне между вторым и третьим пороговыми значениями перемещения поддерживается коэффициент тепловой загрузки двигателя на единичном уровне за счет увеличения стопорного тока якорной цепи пропорционально среднему значению перемещения, а дальнейшее увеличение быстродействия происходит за счет поддержания уровня максимальной скорости на расчетной максимальной величине и роста ускорений в переходных режимах, обусловленного увеличением значений стопорного тока.
При работе электропривода со средними значениями перемещений, превышающими третье пороговое значение, поддерживают значение стопорного тока на второй расчетной постоянной величине при одновременном поддержании уровня максимальной скорости на расчетной максимальной величине для того, чтобы застабилизировать допустимое длительное коммутационное нарушение на постоянном уровне десяти процентов, так как согласно теории коммутационных нарушений для обеспечения безыскровой коммутации и предотвращения возникновения кругового огня необходимо, чтобы допустимое длительное коммутационное нарушение
Дм,
i3KC
10%.
В известных технических решениях не обнаружено введение блоков коррекции значений максимальной скорости и тока стопорения, третьего и четвертого нелинейных элементов, датчика перемещения, блока выделения цикла и блока вычисления среднего значения перемещения, входами связанного с выходами блока выделения цикла и датчика перемещения, а выходами соединенного с первыми входами блоков коррекции значения тока стопорения через четвертый нелинейный элемент и коррекции значения максимальной скорости через третий нелинейный элемент. Причем второй вход блока корреции значения максимальной скорости соединен с выходом командо- аппарата, а выход подключен к входу задатчика интенсивности. Второй вход блока коррекции значения тока стопорения соединен с выходом регулятора ЭДС, а выход подключен к третьему входу регулятора ЭДС.
Введение этих признаков позволит получить положительный эффект, так как с помощью четвертого нелинейного элемента задается закон изменения уровня стопорного тока в функции среднего значения перемещения за п последних циклов, а с помощью третьего нелинейного элемента задается закон изменения уровня максимальной скорости в функции среднего перемещения за п последних циклов. Введение
этих функциональных зависимостей в закон регулирования электроприводом позволит реализовать предлагаемый способ управления и за счет этого уменьшить длительность позиционного перемещения электропривода в каждом цикле при ограничении коэффициента тепловой загрузки и уровня допустимого длительного коммутационного нарушения двигателя до значений, обеспечивающих длительную безаварийную эксплуатацию двигателя
Совокупность указанных признаков позволяет обеспечить повышение интегральной производительности экскаватора при одновременном увеличении его надежности
путем адаптации системы управления электроприводом к горно-технологическим условиям эксплуатации.
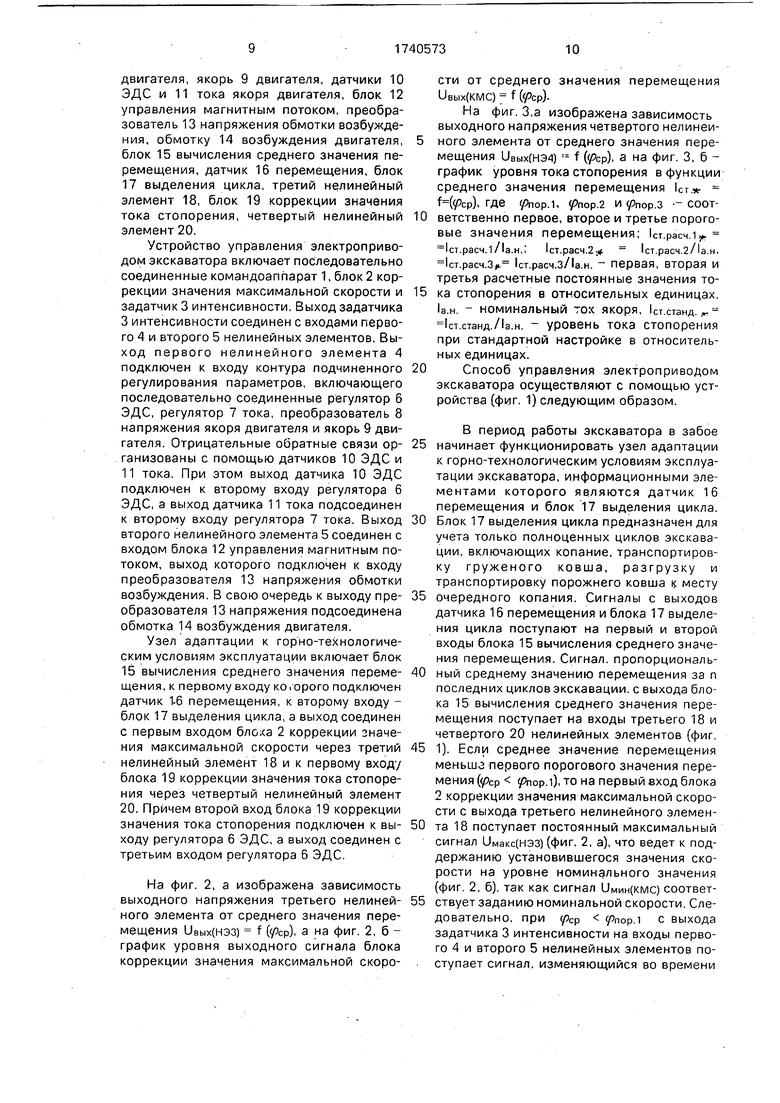
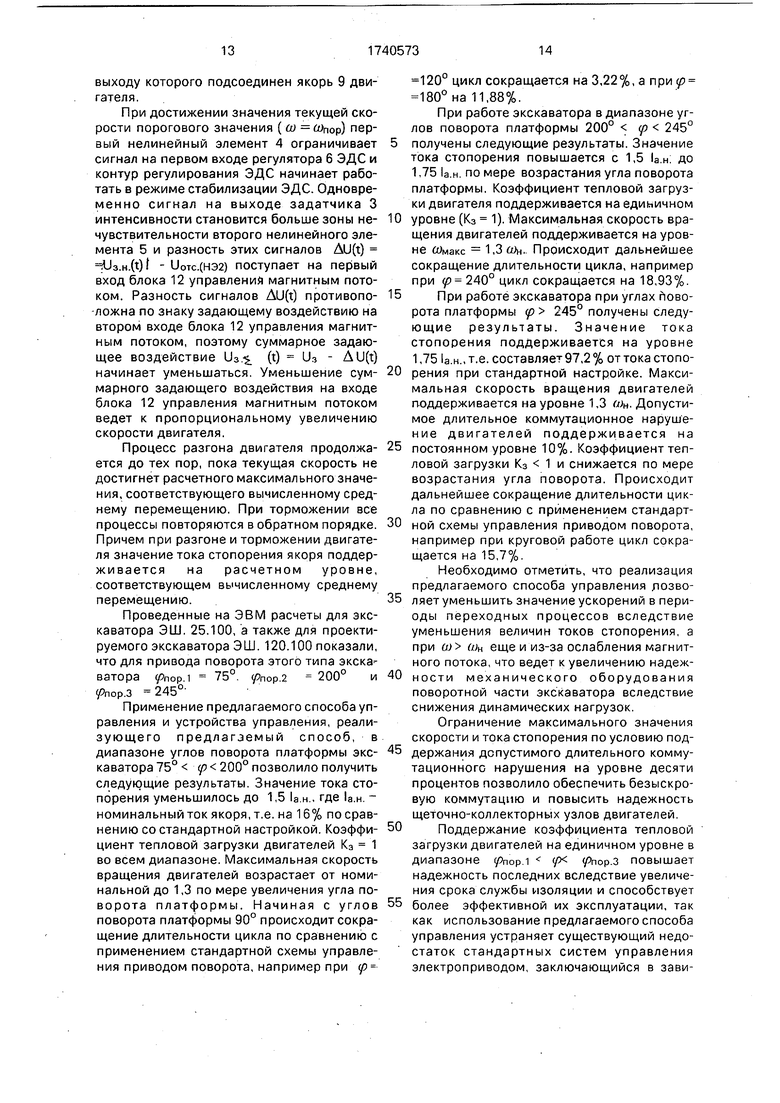
На фиг. 1 изображена функциональная схема устройства управления электроприводом экскаватора, реализующая предлагаемый способ управления, на фиг 2 - зависимости выходного напряжения третьего нелинейного элемента от среднего значения перемещения 11вых(нэз) f () и
график уровня выходного сигнала блока коррекции значения максимальной скорости от среднего значения перемещения ивых(ШС) f (), на фиг. 3 - зависимость выходного напряжения четвертого нелинейного элемента от среднего значения перемещения ивых(нэ4) f () и график уровня тока стопорения в функции среднего перемещения ICT. f ()l на фиг. 4 - принципиальная схема блока коррекции значения
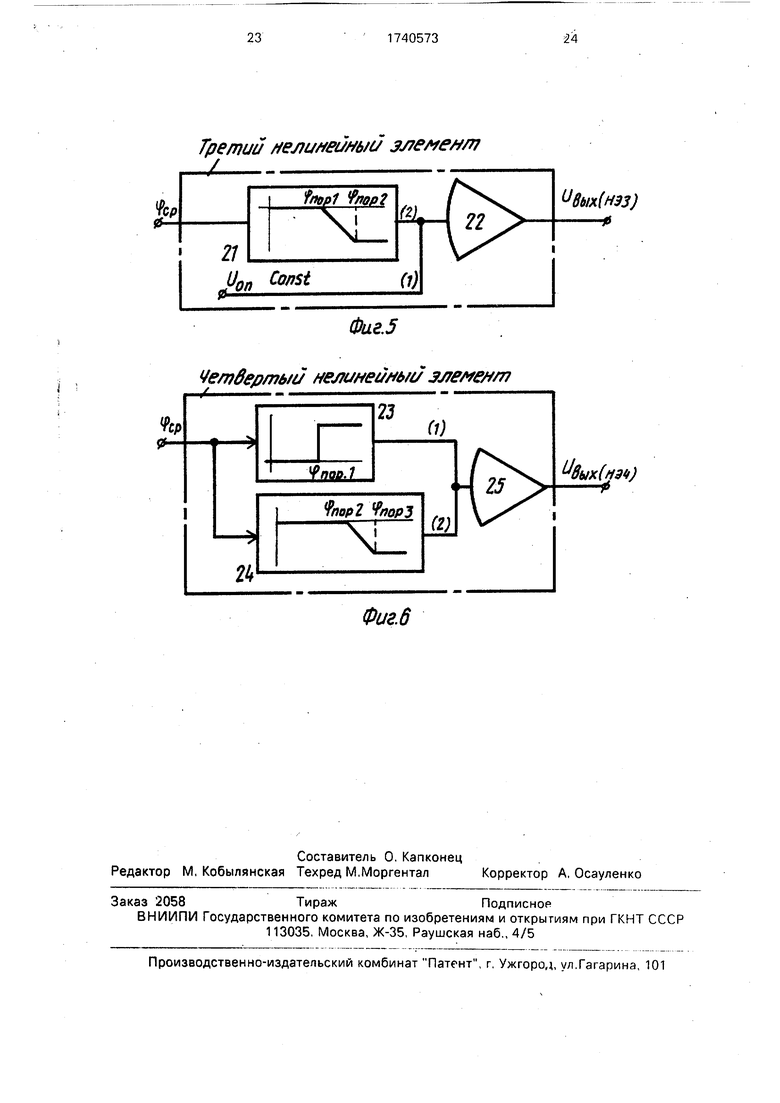
тока стопорения; на фиг. 5 и 6 - функциональные схемы третьего и четвертого нелинейных элементов.
Устройство управления электроприводом экскаватора (фиг. 1) содержит командоаппарат 1, блок 2 коррекции значения максимальной скорости, задатчик 3 интенсивности, первый 4 и второй 5 нелинейные элементы, регулятор 6 ЭДС, регулятор 7 тока, преобразователь 8 напряжения якоря
двигателя, якорь 9 двигателя, датчики 10 ЭДС и 11 тока якоря двигателя, блок 12 управления магнитным потоком, преобразователь 13 напряжения обмотки возбуждения, обмотку 14 возбуждения двигателя, блок 15 вычисления среднего значения перемещения, датчик 16 перемещения, блок 17 выделения цикла, третий нелинейный элемент 18, блок 19 коррекции значения тока стопорения, четвертый нелинейный элемент 20.
Устройство управления электроприводом экскаватора включает последовательно соединенные командоаппарат 1, блок 2 коррекции значения максимальной скорости и задатчик 3 интенсивности, Выход задатчика 3 интенсивности соединен с входами первого 4 и второго 5 нелинейных элементов. Выход первого нелинейного элемента 4 подключен к входу контура подчиненного регулирования параметров, включающего последовательно соединенные регулятор 6 ЭДС, регулятор 7 тока, преобразователь 8 напряжения якоря двигателя и якорь 9 двигателя. Отрицательные обратные связи ор- ганизованы с помощью датчиков 10 ЭДС и 11 тока. При этом выход датчика 10 ЭДС подключен к второму входу регулятора 6 ЭДС, а выход датчика 11 тока подсоединен к второму входу регулятора 7 тока. Выход второго нелинейного элемента 5 соединен с входом блока 12 управления магнитным потоком, выход которого подключен к входу преобразователя 13 напряжения обмотки возбуждения. В свою очередь к выходу пре- образователя 13 напряжения подсоединена обмотка 14 возбуждения двигателя.
Узел адаптации к горно-технологическим условиям эксплуатации включает блок 15 вычисления среднего значения переме- щения, к первому входу ко i орого подключен датчик 1-6 перемещения, к второму входу - блок 17 выделения цикла, а выход соединен с первым входом бло.о 2 коррекции значения максимальной скорости через третий нелинейный элемент 18 и к первому входу блока 19 коррекции значения тока стопорения через четвертый нелинейный элемент 20. Причем второй вход блока 19 коррекции значения тока стопорения подключен к вы- ходу регулятора 6 ЭДС, а выход соединен с третьим входом регулятора 6 ЭДС.
На фиг. 2, а изображена зависимость выходного напряжения третьего нелиней- ного элемента от среднего значения перемещения иВых(нэз) f (pcp), а на фиг. 2,6- график уровня выходного сигнала блока коррекции значения максимальной скорости от среднего значения перемещения
U8bix(KMC) f (pep).
На фиг. 3,а изображена зависимость выходного напряжения четвертого нелинейного элемента от среднего значения перемещения 11вых(НЭ4) - f (рср), а на фиг. 3,6- график уровня токастопорения в функции среднего значения перемещения Ст.- f(pcp), где (рпорл, .2 и рпор.з - соответственно первое, второе и третье пороговые значения перемещения; Icr.pac4.ip.
1ст.расч.1/1а.н.; ст.расч.2 ICT расч 2/U н,
1ст.рэсч.з 1ст.расч..н. первая, вторая и третья расчетные постоянные значения тока стопорения в относительных единицах,
la.H. - НОМИНаЛЬНЫЙ ТОХ ЯКОРЯ, ст.станд.
1ст.станд..н. - уровень тока стопорения при стандартной настройке в относительных единицах.
Способ управления электроприводом экскаватора осуществляют с помощью устройства (фиг. 1) следующим образом.
В период работы экскаватора в забое начинает функционировать узел адаптации к горно-технологическим условиям эксплуатации экскаватора, информационными элементами которого являются датчик 16 перемещения и блок 17 выделения цикла. Блок 17 выделения цикла предназначен для учета только полноценных циклов экскавации, включающих копание, транспортировку груженого ковша, разгрузку и транспортировку порожнего ковша к месту очередного копания. Сигналы с выходов датчика 16 перемещения и блока 17 выделения цикла поступают на первый и второй входы блока 15 вычисления среднего значения перемещения. Сигнал, пропорциональный среднему значению перемещения за п последних циклов экскавации, с выхода блока 15 вычисления среднего значения перемещения поступает на входы третьего 18 и четвертого 20 нелинейных элементов (фиг. 1). Если среднее значение перемещения меньшз первого порогового значения пере- мения(ср nop.i), то на первый вход блока 2 коррекции значения максимальной скорости с выхода третьего нелинейного элемента 18 поступает постоянный максимальный сигнал имакс(нэз) (фиг. 2, а), что ведет к поддержанию установившегося значения скорости на уровне номинального значения (фиг. 2, б), так как сигнал UMHH(KMC) соответствует заданию номинальной скорости. Следовательно, при узср .1 с выхода задатчика 3 интенсивности на входы первого 4 и второго 5 нелинейных элементов поступает сигнал, изменяющийся во времени
от нуля до значения, соответствующего номинальной скорости привода.
При (рср пор.1 с выхода четвертого нелинейного элемента 20 на первый вход блока 19 коррекции значения тока стопоре- ния поступает сигнал, равный нулю (фиг. 3, а), что соответствует разрыву цепи обратной связи регулятора 6 ЭДС, организованный через этот блок 19 (фиг. 3, б). Поэтому при рср рпорЛ система управления электроприводом работает как обычная система подчиненного регулирования параметров с постоянным значением магнитного потока возбуждения электродвигателя, значение которого задано величиной U3 const (фиг. 1). Необходимо отметить, что при рср
упор.1 максимальное значение скорости электропривода меньше порогового значения, т.е. формируется треугольная тахог- рамма с ОДюр, поэтому контур регулирования магнитного потока не подключается.
При пор.1 рср пор.2 с выхода третьего нелинейного элемента 18 на первый вход блока 2 коррекции значения максимальной скорости поступает сигнал, уменьшающийся пропорционально увеличению значения рср (фиг. 2, а). При этом выходной сигнал блока 2 коррекции значения максимальной скорости возрастает пропорционально увеличению рср (фиг. 2, б), что ведет к увеличению задания значения максимальной скорости привода.
Одновременнол при рпорл рср
.2 с выхода четвертого нелинейного элемента 20 на первый вход блока 19 коррекции значения тока стопорения поступает постоянный сигнал (фиг. 3. а), что соответствует организации обратной связи регулятора 6 ЭДС с постоянным коэффициентом передачи через блок 19. При этом уровень тока стопорения уменьшается до первой расчетной постоянной величины, соответствующей коэффициенту тепловой загрузки двигателя, равному единице (фиг. 3,6).
При пор.2 flcp (рпорз с выхода третьего нелинейного элемента 18 на первый вход блока 2 коррекции значения максимальной скорости поступает постоянный минимальный сигнал имин(нэз)(фиг. 2, а), что ведет к поддержанию установившегося значения скорости привода на максимальном расчетном уровне (для экскаватора ЭШ. 25.100 1,3 ). Одновременно с выхода четвертого нелинейного элемента 20 на первый вход блока 19 коррекции значения тока стопорения поступает сигнал, уменьшающийся пропорционально увеличению величины среднего перемещения
(фиг. 3, а), что ведет к пропорциональному ослаблению действия обратной связи регулятора 6 ЭДС, организованной через блок 19. При этом уровень тока стопорения воз- растает в такой же пропорции для поддержания коэффициента тепловой загрузки двигателя на единичном уровне (фиг. 3, б).
При рср пор.з третий нелинейный элемент 18 продолжает формировать управляющий сигнал на первый вход блока 2 коррекции значения максимальной скорости, соответствующей заданию расчетной максимальной скорости привода (фиг. 2, б). Одновременно с выхода четвертого нелинейного элемента 20 на первый вход блока 19 коррекции значения тока стопорения поступает постоянный сигнал (фиг. 3, а), что ведет к организации действия обратной связи регулятора 6 ЭДС через блок 19 с постоянным коэффициентом передачи, соответствующим поддержанию уровня тока стопорения на второй расчетной постоянной величине (фиг. 3, б). Стабилизация уровня тока стопорения на этом участке перемещения на второй расчетной величине при максимальном расчетном уровне скорости обусловлена поддержанием допустимого длительного коммутационного нарушения на постоянном минимальном
уровне десяти процентов, обеспечивающем
удовлетворительное качество коммутации.
При подаче машинистом через командоаппарат 1. сигнала управления на начало
движения функционирование системы управления электроприводом при tpnop.i происходит следующим образом. При текущей скорости вращения двигателя, меньшей порогового значения (), функционирует только контур регулирования ЭДС, так как в этот период времени значение выходного сигнала задатчика 3 интенсивности меньше зоны нечувствительности второго нелинейного элемента 5. Следовательно, этот сигнал не проходит на
первый вход блока 12 управления магнитным потоком. Поэтому блок 12 управления поддерживает номинальное значение магнитного потока.
При поступлении сигнала управления
на первый вход регулятора 6 ЭДС в нем формируется задающее воздействие на ток якорной цепи, которое поступает на первый вход регулятора 7 тока. Причем уровеньтока стопорения устанавливается в регуляторе 6
ЭДС с помощью блока 19 коррекции значения тока стопорения в функции среднего значения перемещения. Сигнал с выхода регулятора 7 тока поступает на вход преобразователя 8 напряжения якоря двигателя, к
выходу которого подсоединен якорь 9 двигателя.
При достижении значения текущей скорости порогового значения ( а) -(л)пор) первый нелинейный элемент 4 ограничивает сигнал на первом входе регулятора 6 ЭДС и контур регулирования ЭДС начинает работать в режиме стабилизации ЭДС. Одновременно сигнал на выходе задатчика 3 интенсивности становится больше зоны нечувствительности второго нелинейного элемента 5 и разность этих сигналов AU(t) fJ3.H.(t)l - и0тс.(нэ2) поступает на первый вход блока 12 управлений магнитным потоком. Разность сигналов AU(t) противоположна по знаку задающему воздействию на втором входе блока 12 управления магнитным потоком, поэтому суммарное задающее воздействие U3 (t) U3 - AU(t) начинает уменьшаться. Уменьшение суммарного задающего воздействия на входе блока 12 управления магнитным потоком ведет к пропорциональному увеличению скорости двигателя.
Процесс разгона двигателя продолжается до тех пор, пока текущая скорость не достигнет расчетного максимального значения, соответствующего вычисленному среднему перемещению. При торможении все процессы повторяются в обратном порядке. Причем при разгоне и торможении двигателя значение тока стопорения якоря поддерживается на расчетном уровне, соответствующем вычисленному среднему перемещению.
Проведенные на ЭВМ расчеты для экскаватора ЭШ. 25.100, а также для проектируемого экскаватора ЭШ. 120.100 показали, что для привода поворота этого типа экскаватора (fnop.i 75° ( 2 200° и рлор.з 245°
Применение предлагаемого способа управления и устройства управления, реализующего предлагаемый способ, в диапазоне углов поворота платформы экскаватора 75° р 200° позволило получить следующие результаты. Значение тока стопорения уменьшилось до 1,5 la н , где а.н номинальный ток якоря, т.е. на 16% по сравнению со стандартной настройкой. Коэффициент тепловой загрузки двигателей Кэ 1 во всем диапазоне. Максимальная скорость вращения двигателей возрастает от номинальной до 1,3 по мере увеличения угла поворота платформы. Начиная с углов поворота платформы 90° происходит сокращение длительности цикла по сравнению с применением стандартной схемы управления приводом поворота, например при р
120° цикл сокращается на 3,22%, а при р 180° на 11,88%.
При работе экскаватора в диапазоне углов поворота платформы 200° р 245°
получены следующие результаты. Значение тока стопорения повышается с 1,5 а.н. до 1,75 1а.н. по мере возрастания угла поворота платформы. Коэффициент тепловой загрузки двигателя поддерживается на едиьичном
уровне (К3 1). Максимальная скорость вращения двигателей поддерживается на уровне Шмакс 1,3 а). Происходит дальнейшее сокращение длительности цикла, например при р 240° цикл сокращается на 18,93%.
При работе экскаватора при углах пово- рота платформы р 245° получены следующие результаты. Значение тока стопорения поддерживается на уровне 1,75 1а.н., т.е. составляет 97,2% оттокастопорения при стандартной настройке. Максимальная скорость вращения двигателей поддерживается на уровне 1,3 мн. Допустимое длительное коммутационное нарушение двигателей поддерживается на
постоянном уровне 10%. Коэффициент тепловой загрузки К3 1 и снижается по мере возрастания угла поворота. Происходит дальнейшее сокращение длительности цикла по сравнению с применением стандарт
ной схемы управления приводом поворота,
например при круговой работе цикл сокращается на 15,7%.
Необходимо отметить, что реализация предлагаемого способа управления гюзволяет уменьшить значение ускорений в периоды переходных процессов вследствие уменьшения величин токов стопорения, а при ш (о еще и из-за ослабления магнитного потока, что ведет к увеличению надежности механического оборудования поворотной части экскаватора вследствие снижения динамических нагрузок.
Ограничение максимального значения скорости и тока стопорения по условию поддержания допустимого длительного коммутационного нарушения на уровне десяти процентов позволило обеспечить безыскровую коммутацию и повысить надежность щеточно-коллекторных узлов двигателей.
Поддержание коэффициента тепловой загрузки двигателей на единичном уровне в диапазоне 1 fX fnop.3 повышает надежность последних вследствие увеличения срока службы изоляции и способствует
более эффективной их эксплуатации, так как использование предлагаемого способа управления устраняет существующий недостаток стандартных систем управления электроприводом, заключающийся в зависимости коэффициента тепловой загрузки двигателя от величины перемещения. Например, для привода поворота экскаватора ЭШ. 25.100 со стандартной системой управления коэффициент тепловой загрузки больше единицы при работе экскаватора с углами поворота платформы р 120° (при (р 60°, К3 1,18), что ускоряет процесс старения изоляции двигателей, а при работе экскаватора с углами поворота платфор- мы р 120° коэффициент тепловой загрузки двигателей становится меньше единицы (при р 180°, К3 0,85), что ведет к недоиспользованию двигателей по эффективному моменту и снижает производительность экскаватора.
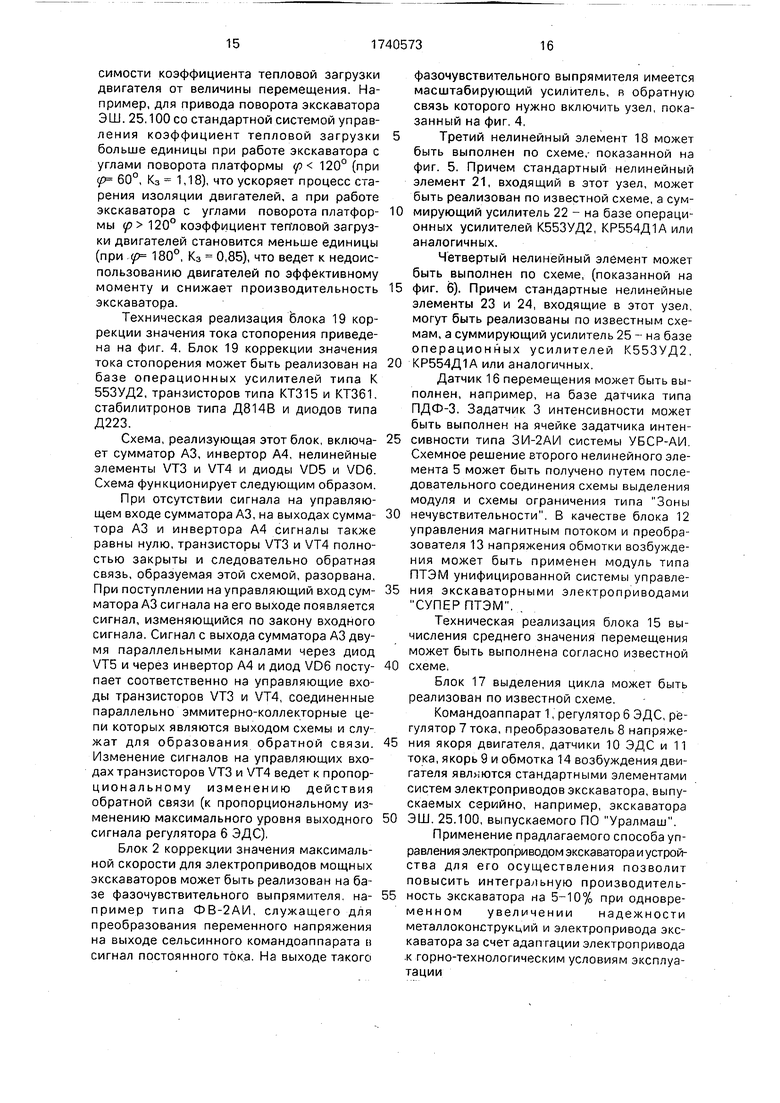
Техническая реализация блока 19 коррекции значения тока стопорения приведена на фиг. 4. Блок 19 коррекции значения тока стопорения может быть реализован на базе операционных усилителей типа К 553УД2, транзисторов типа КТ315 и КТ361, стабилитронов типа Д814В и диодов типа Д223.
Схема, реализующая этот блок, включа- ет сумматор A3, инвертор А4, нелинейные элементы VT3 и VT4 и диоды VD5 и VD6. Схема функционирует следующим образом.
При отсутствии сигнала на управляющем входе сумматора A3, на выходах сумма- тора A3 и инвертора А4 сигналы также равны нулю, транзисторы VT3 и VT4 полностью закрыты и следовательно обратная связь, образуемая этой схемой, разорвана. При поступлении на управляющий вход сум- матора A3 сигнала на его выходе появляется сигнал, изменяющийся по закону входного сигнала. Сигнал с выхода сумматора A3 двумя параллельными каналами через диод VT5 и через инвертор А4 и диод VD6 посту- пает соответственно на управляющие входы транзисторов VT3 и VT4, соединенные параллельно эммитерно-коллекторные цепи которых являются выходом схемы и служат для образования обратной связи. Изменение сигналов на управляющих входах транзисторов VT3 и VT4 ведет к пропор- циональному изменению действия обратной связи (к пропорциональному изменению максимального уровня выходного сигнала регулятора 6 ЭДС),
Блок 2 коррекции значения максимальной скорости для электроприводов мощных экскаваторов может быть реализован на базе фазочувствительного выпрямителя на- пример типа ФВ-2АИ, служащего для преобразования переменного напряжения на выходе сельсинного командоаппарата Е) сигнал постоянного тока. На выходе такого
фазочувствительного выпрямителя имеется масштабирующий усилитель, в обратную связь которого нужно включить узел, показанный на фиг. 4.
Третий нелинейный элемент 18 может быть выполнен по схеме, показанной на фиг. 5. Причем стандартный нелинейный элемент 21, входящий в этот узел, может быть реализован по известной схеме, а суммирующий усилитель 22 - на базе операционных усилителей К553УД2, КР554Д1А или аналогичных.
Четвертый нелинейный элемент может быть выполнен по схеме, (показанной на фиг. 6). Причем стандартные нелинейные элементы 23 и 24, входящие в этот узел могут быть реализованы по известным схемам, а суммирующий усилитель 25 - на базе операционных усилителей К553УД2, КР554Д1А или аналогичных.
Датчик 16 перемещения может быть выполнен, например, на базе датчика типа ПДФ-3. Задатчик 3 интенсивности может быть выполнен на ячейке задатчика интенсивности типа ЗИ-2АИ системы УБСР-АИ Схемное решение второго нелинейного элемента 5 может быть получено путем последовательного соединения схемы выделения модуля и схемы ограничения типа Зоны нечувствительности. В качестве блока 12 управления магнитным потоком и преобразователя 13 напряжения обмотки возбуждения может быть применен модуль типа ПТЭМ унифицированной системы управления экскаваторными электроприводами СУПЕРПТЭМ.
Техническая реализация блока 15 вычисления среднего значения перемещения может быть выполнена согласно известной схеме.
Блок 17 выделения цикла может быть реализован по известной схеме.
Командоаппарат 1, регулятор 6 ЭДС, регулятор 7 тока, преобразователь 8 напряжения якоря двигателя, датчики 10 ЭДС и 11 тока, якорь 9 и обмотка 14 возбуждения двигателя являются стандартными элементами систем электроприводов экскаватора, выпускаемых серийно, например, экскаватора ЭШ. 25.100, выпускаемого ПО Уралмаш.
Применение предлагаемого способа управления электроприводом экскаватора и устройства для его осуществления позволит повысить интегральную производительность экскаватора на 5-10% при одновременном увеличении надежности металлоконструкций и электропривода экскаватора за счет адап гации электропривода к горно-технологическим условиям эксплуатации
Формула изобретения
1.Способ управления электроприводом экскаватора, заключающийся в ограничении тока стопорения, задании скорости в цикле и ее порогового значения, сравнении действительной и заданной скоростей, регулировании скорости электропривода изменением напряжения при превышении пороговой скорости над действительной, регулировании скорости электропривода изменением потока при повышении действительной скорости над пороговой, отличающийся тем, что, с целью повышения производительности и надежности экскаватора путем адаптации электропривода к горно-технологическим условиям эксплуатации, задают три пороговых значения перемещения, измеряют действительные значения перемещений в каждом цикле и вычисляют их среднее значение за п последних циклов, сравнивают среднее значение перемещения за п последних циклов с заданными пороговыми значениями перемещений, причем при превышении среднего значения перемещения над первым пороговым значением уменьшают уровень тока стопорения до величины, определяемой коэффициентом тепловой загрузки двигателя электропривода, равному единице, с одновременным увеличением максимального уровня задания скорости пропорционально среднему значению перемещения, при повышении среднего значения перемещения над вторым пороговым значением увеличивают уровень тока стопорения пор пропор- ционально среднему значению перемещения, а при превышении среднего значения перемещения над третьим пороговым значением поддерживают величину тока стопорения на допустимом уровне коммутации при одновременном поддержании уровня максимальной скорости на допустимой величине.
2.Устройство длг управления элрктро- приводом экскаватора, содержащее коман- доаппарат, задатчик интенсивности выход которого подключен к входам первого и второго нелинейных элементов, выход первого
нелинейного элемента подключен к первому входу регулятора ЭДС, выход которого подключен к первому входу регулятора тока, к второму входу которого подключен датчик
тока якоря двигателя, а выход регулятора тока подключен к входу преобразователя напряжения якоря двигателя, датчик ЭДС, выход которого подключен к второму входу регулятора ЭДС, выход второго нелцнейного элемента подключен к первому входу блока управления магнитным потоком, к второму входу которого подключен источник опорного напряжения, выход блока управления магнитным потоком подключен к
преобразователю напряжения обмотки возбуждения, а выход датчика тока возбуждения подключен к третьему входу блока управления магнитным потоком, отличающееся тем, что, с целью повышения
производительности и надежности экскаватора путем адаптации электропривода к гррно-технологическим условиям эксплуатации, оно снабжено блоками выделения цикла и вычисления среднего значения перемещения, датчиком перемещения, блоками коррекции значений максимальной скорости и тока стопорения, третьим и четвертым нелинейными элементами, при этом выход третьего нелинейного элемента подключей к первому входу блока коррекции значений максимальной скорости, к второму входу которого подключен командоаппа- рат, а выход блока коррекции максимальной скорости подключен к входу задатчика интенсивности, датчик перемещения подключен к первому входу блока вычисления среднего значения перемещения, к второму входу которого подключен блок выделения цикла, а выход блока вычисления среднего
значения перемещения подключен к входам третьего и четвертого нелинейных элементов, выход четвертого нелинейного элемента подключен к первому входу блока коррекции значений тока стопорения, выход которого подключен к третьему входу регулятора ЭДС, выход которого подключен к другому входу блока коррекции значений тока стопорения.
uвых. (нэз)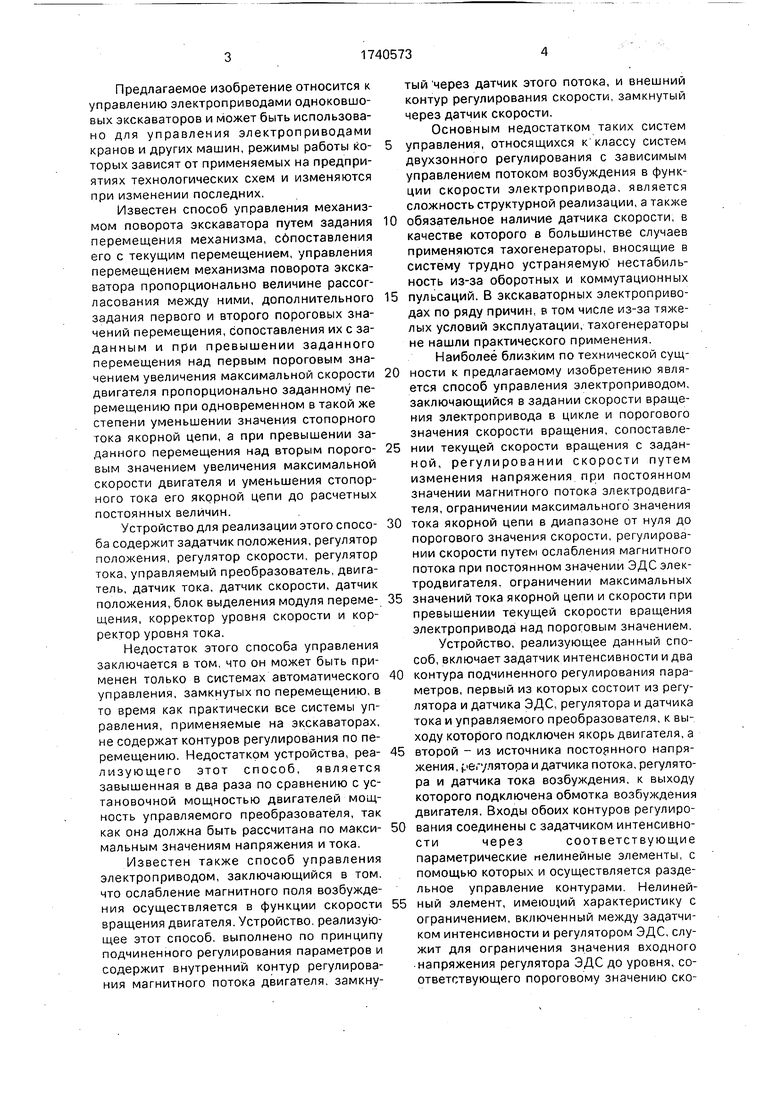



| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления электроприводом одноковшового экскаватора и устройство для его осуществления | 1988 |
|
SU1629423A1 |
| Позиционный электропривод | 1982 |
|
SU1084727A1 |
| СПОСОБ КОНТРОЛЯ И РЕГУЛИРОВАНИЯ ЗАГРУЗКИ ПРИВОДА ОДНОКОВШОВОГО ЭКСКАВАТОРА В ЭКСПЛУАТАЦИОННЫХ РЕЖИМАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2376422C1 |
| Устройство для ограничения динамических усилий механизмов экскаватора | 1990 |
|
SU1788161A1 |
| Устройство для управления копающим механизмом экскаватора | 1976 |
|
SU730939A1 |
| Система стабилизации натяжения подъемного каната экскаватора-драглайна | 1990 |
|
SU1768720A1 |
| Многодвигательный частотно-регулируемый электропривод | 1988 |
|
SU1598256A1 |
| Электропривод постоянного тока шахтной подъемной установки | 1986 |
|
SU1324976A1 |
| Устройство для ограничения динамических нагрузок копающих механизмов экскаватора | 1990 |
|
SU1740571A1 |
| Электропривод постоянного тока | 1978 |
|
SU744883A1 |


Сущность изобретения: командоаппа- рат 1, корректор 2 значений максимальной скорости, задатчик 3 интенсивности, нелинейные элементы 4, 5, 20, регулятор 6 ЭДС, регулятор 7 тока, преобразователь 8, якорь 9 двигателя, датчик 10 ЭДС, датчик 11 тока, блок 12 управления, преобразователь 13 напряжения, обмотка 14 возбуждения двигателя, блок 15 вычисления среднего значения перемещения, датчик 16 перемещения, блок 17 выделения цикла, корректор уровня стопорного тока. 2 с.п.ф-лы, 6 ил. Ё 2 О ел СО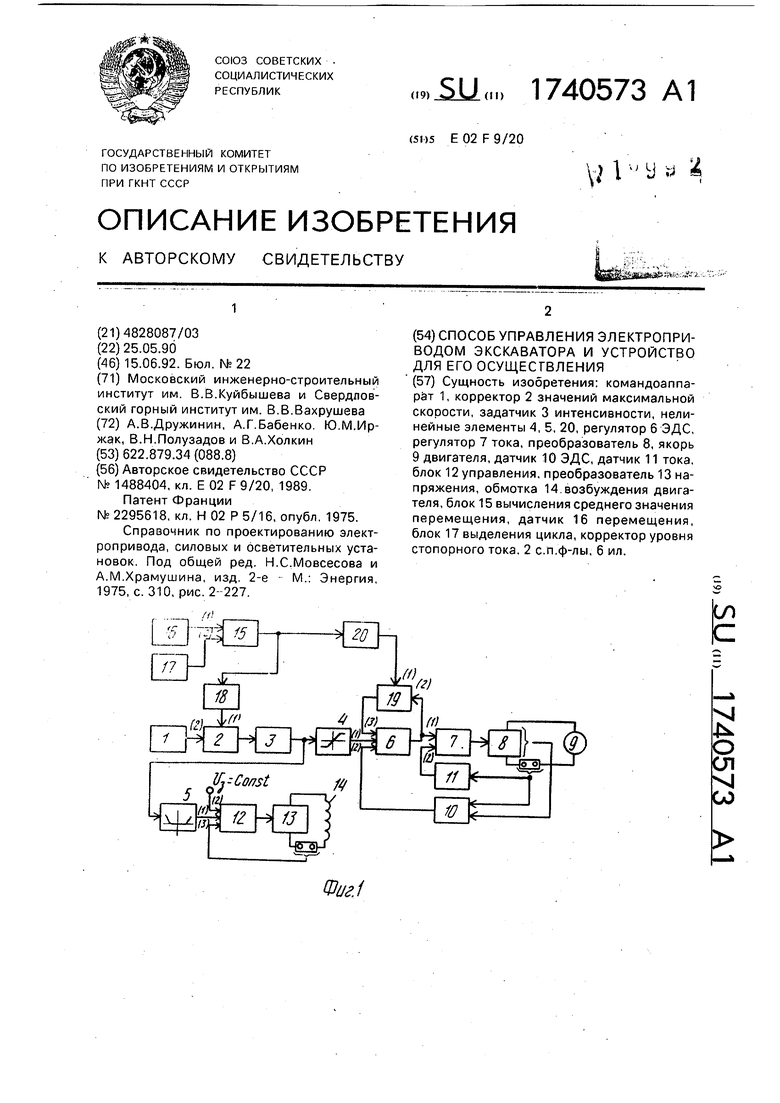
а
ивых1 пс)
б
VW/
а
и8ых{нэч)
I,
ст.
х
т у ст.расу.
У™р фцг.з fay.t. Глсрз
УпорЗ
Фиг. 2
ftp
L
ст.росч. &
п.
ср
Ш КТ361
МП KTJ15
Вход
Ш7///Г0
41-
Выход
о
Упра(мя- ющийЫ
Уср°
-15В +/5Ло-А
7/Г
RP5 ЮК
RPS
VB6 Д223
ФиеЛ
Третий мелинеиньш элемент
/
Ј
f/IOflf УПОР
Четверть/и нелине иwtt/элемея/я
(2)
ивых(нэз)
Фиг.5
Фиг.6
| Авторское свидетельство СССР № 1488404, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ЗАПОРНО-ПЛОМБИРОВОЧНОЕ УСТРОЙСТВО | 2005 |
|
RU2295618C1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Сплав для отливки колец для сальниковых набивок | 1922 |
|
SU1975A1 |
| Справочник по проектированию электропривода, силовых и осветительных установок | |||
| Под общей ред | |||
| Н.С.Мовсесова и А.М.Храмушина, изд | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Приспособление для съемки жилетно-карманным фотографическим аппаратом со штатива | 1921 |
|
SU310A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
