Изобретение относится к системам управления копающими механизмами экскаваторов-драглайнов и предназначено для управления приводом подъема в процессе копания.
Известна система стабилизации натяжения подъемного каната экскаватора- драглайна 1,включающая командоаппарат, устройство управления приводом подъема( преобразователь с подключенным к нему двигателем, датчик статического тока и его производной, задатчик натяжения и два усилителя с насыщением. Первый однополярный усилитель выполняет функцию регулятора натяжения подъемного каната, а второй однополярный усилитель совместно со связью между ко- мандоаппаратом и системой управления приводом подъема - функцию блока выделения наибольшего из двух сигналов.
Данная система имеет целью поддержания заданного усилия в подъемных канатах.
Однако она не обеспечивает эффективного выбора слабины подъемного каната, которая образуется при опускании ковша на забой со значительной скоростью привода подъема.
Известна также система стабилизации натяжения подъемного каната 2, содержащая командоаппарат, устройство управления приводом подъема, преобразователь с подключенным к нему двигателем, датчик статического тока и-его производной, задатчик натяжения, два усилителя с насыщением, нелинейное звено и датчик длины тягового каната. Эта система также поддерживает минимальное значение натяжения подъемного каната, которое корректируется в зависимости от положения ковша относительно направляющих блоков. Это позволяет учитывать влияние веса каната и образуемой им цепной линии на величину натяжения подъемного каната, что устраняет возможность его прослабления вблизи направляющих блоков.
W
е
VI
о
00 VI Ю О
Однако при образовании слабины подъемного каната это устройство также не обеспечивает эффективного его выбора. Объясняется это следующим. При прослаб- лении подъемного каната на выходе систе- мы появляется сигнал, задающий максимальную скорость привода .здъема в направлении на уменьшение дликы подъемного каната. Привод подъема реверсируется и к моменту окончания выбора слабины имеет значительную скорость. Усилие в подъемном канате при этом возрастает выше заданного и сигнал на выходе первого усилителя с насыщением, являющегося регулятором натяжения, уменьшается до нуля. Вследствие инерционности привода подъема происходит подхват ковша с отрывом его от забоя,затем процесс повторяется, Привод подъема таким образом работает в колебательном режиме, что недопустимо при управлении процессом экскавации грунта.
Наиболее близким техническим решением к изобретению является система стабилизации натяжения подъемного каната - экскаватора-драглайна 3, включающая за- датчик натяжения, два усилителя с насыщением, датчики статического тока и его производной, командоаппарат, систему управления приводом подъема, преобразователь, питающий двигатель, блок вычисления составляющей скорости тяги, блок коррекции скорости подъема и последоватзльно соединенные релейный и ключевой элементы.
Первый усилитель с насыщением, так же как и в системе (1) выполняет функцию регулятора натяжения подъемного каната, второй усилитель с насыщением совместно со связью между командоаппаратом v-, системой управления - функцию блока выделения наибольшего сигнала. Релейный элемент, соединенный с датчиком статического тока, представляет собой датчик наличия слабины подъемного каната, Нелинейный блок коррекции скорости подъема выполнен в виде релейного элемента и последовательно соединенных датчика скорости подъема, первого сумматора интегрального усилителя, второго сумматора и нелинейного элемента.
На вход интегрального усилители поступают сигналы, пропорциональные скорости привода подъема и составляющей скорости привода тяги, поэтому сигнал на выходе этого усилителя пропорционален величине слабины подъемного каната.
Недостаток системы стабилизации 3 заключается в том, что эта система допускает образование значительной слабины
подъемного каната и не обеспечивает достаточно быстрого ее выбора. При опускании ковша на забой со значительной скоростью привода подъема, что возможно, например,
при плохой видимости, слабина образуется с момента касания ковшом грунта. Величина образующейся слабины подъемного каната пропорциональна скорости встречи ковша с забоем и временем снижения этой
0 скорости до нуля. Время снижения скорости привода подъема определяется значением тормозного усилия, создаваемого электродвигателями подъема.
В режиме стабилизации натяжения
5 подъемного каната система работает таким образом, что это усилие ограничивается заданным, которое невелико и определяется весом упряжи ковша, Поэтому торможение привода затягивается по времени, что также
0 приводит и к увеличению продолжительности времени выбора образовавшейся слабины подъемного каната.
Целью изобретения является сокращение длительности процесса выбора слабины
5 подъемного каната для повышения производительности и надежности экскаватора.
Систегиа включает систему 1 управления приводом подъема, подключенную к преобразователю подъема 2, соединенному
0 с двигателем 3. Система 1 управления связана первым входом с командоаппаратом 4. Да гчик 5 статического тока подъема и задат- чик б натяжения подъемного каната связаны соответственно с первым и вторым
5 входами первого усилителя 7 с насыщением, выходом подключенного ; первому входу второго усилителя 8 с насыщением, вторым входом соединенного с командоаппаратом 4, Датчик 9 скорости подъема выхо0 дом подключен к первому входу интегрирующего усилителя 1C и к входу нелинейного элемента 11, выходами связанных с первым и вторым входами сумматора 12. Третьим входом сумматор 12 через пер5 вый релейный элемент 13 подключен к датчику 5 статической составляющей тока, Выход первого релейного элемента 13 связан также с третьим входом интегрирующего усилителя 10,
0 Сумматор 12 выходом через второй ре- яейный элемент 14 подключен к третьему входу второго усилителя с насыщением 8, третий вход первого усилителя 7 через дополнительный нелинейный элемент 15 связан с выхо5 дом интегрирующего усилителя 10.
Система стабилизации натяжения подъемного каната экскаватора-драглайна функционирует следующим образом.
В рабочих режимах транспортировки
ковшз ч черпания грунта усилие а подъемных канатах превышает минимально допустимое, определяемое сигналом с задатчика
6.При этом на выходах первого 7 и второго 8 усилителей с насыщением, имеющих од- нополярную характеристику, напряжение равняется нулю. Нулю равняется напряжение также и на выходах второго релейного элемента 14.
Первый релейный элемент 13 имеет характеристику с зоной нечувствительности. При усилии в подъемном канате меньшем веса упряжи ковша сигнал на выходе первого релейного элемента 13 имеется сигнал, который блокирует интегрирующий усилитель 10 и на его выходе напряжение отсут- ствует.
При опускании ковша на забой слабина подъемного каната начинает образовываться с момента касания ковшом грунта. Усилие в подъемном канате при этом становится меньше усилия, заданного с помощью задатчикз б, вызывая тем самым по- явление сигнала на выходе первого усилителя 7. Этот сигнал через усилитель 8 поступает на вход системы управления при- водом подъеме, задавая скорость привода в направлении на подъем ковша.
Вс втором усилителе 8 происходит коррекция сигнала с выхода первого усилителя
7,являющегося регулятором натяжения подьемного каната. Коррекция сигнала во втором усилителе осуществляется таким образом, что суммарный сигнал задания скорости на входе системы управления приводом 1 равняется наибольшему из двух сигналов: с командоаппарата 4 или с выхода первого усилителя 7.
При касании ковшом грунта в момент начала образования слабины сигнал на выходе первого релейного элемента 13, явля- ющегося датчиком наличия слабины, становится равным нулю и интегрирующий усилитель 10 деблокируется, На первый вход интегрирующего усилителя 10с датчика скорости 9 привода подъема поступает сигнал, пропорциональный скорости образования слабины, поэтому напряжение на выходе интегрирующего усилителя пропорционально величине слабины подъемного каната. Это напряжение через дополни- тельный элемент 15 поступает на дополни- тельный вход первого усилителя 7. Дополнительный нелинейный элемент 11 имеет однополярную характеристику с насыщением (фиг. 2), причем сигнал на его выходе имеет ту же полярность, что и сигнал на выходе задатчика 6. Поэтому сигнал с выхода дополнительного нелинейного элемента 15 увеличивает результирующий сигнал задания на стабилизируемое усилие
привода. Возрастание усилия привода при наличии слабины подъемного каната обеспечивает более эффективное торможение привода подъема, уменьшая тем самым образующуюся слабины подъемного каната и сокращая время ее выбора.
Напряжение на выходе сумматора 12 равно нулю до тех пор, пока на его вход поступает сигнал с первого релейного элемента 13 и пока скорость привода подъема направлена на опускание ковша. При отсутствии напряжения на выходе первого релейного элемента 13 сигнал на выходе сумматора 12 появляется при превышении по модулю сигнала с выхода нелинейного элемента 11 над сигналом с выхода интегриру- ющего усилителя 10. Зависимость вход-выход нелинейного элемента 11 рассчитывается обычным путем, ислодя из та- хограммы привода подъема. При появлении сигнала на аыходе сумматора VI с выхода второго релейного элемента И на вход первого усилителя 7 поступает сигнал, направленный на уменьшение скорости привода подъема.
Величина этого сигнала выбирается такой, чтобы результирующий сигнал задания скорости привода подъема находился в пределах 0,15-0,2 от максимального сигнала задания скорости.
Это позволяет уменьшить скорость привода подъема к моменту окончания выбора слабины и тем самым исключите динамические нагрузки, возникающие прч подхвате ковша с большой скоростью подъема.
В момент окончания выбом слабины усилие в подъемном канате возрастает, в результате чего перебрасываемся первый релейный элемент 13, на его выхг«де появляется напряжение, блокирующее интегрирующий усилитель 10. Сигнал на выходе сумматора 12, а следовательно, v на выходе второго релейного элемента становится равным нулю. Скорость привода подъема при этом определяется только сигналами выходов первого усилителя 7 и командоаппарата 4.
Элементы 7-15 могут быть реализованы на базе операционных усилителей К553УД2, КР544УД/А или аналогичных (4). Однополярность усилителей 7 i. 8 обеспечивается, например, включением в обратную связь диода (5). Интегрирующей усилитель 10 имеет в обратной связи конденсатор, параллельно которому включается диод, поскольку величина слабины подъемного каната может быть только одного знака. Нелинейные элементы 11 и 15 могут быть выполнены согласно (4), путем кусочно-линейной аппроксимации расчетных характеристик первый и второй релейные элементы 13 и 14 реализуются путем включения в обратную связь усилителей стабилитронов, типа, например, Д814.
Датчик скорости подъема может быть реализован как датчик ЭДС двигателя (при постоянном магнитном потоке).
Командоаппарат4, система управления приводом 1, преобразователь 2 и двигатель 3 являются стандартными элементами сие- тем электропривода экскаваторов, например, ЭШ20.90, выпускаемых серийно По Уралмаш. Датчик статического тока 5 является датчиком усилия привода подъема. Он реализуется на усилителе, решающем уравнение движения привода, путем вычитания из полного тока производной скорости привода.
Применение указанного уптройства позволяет повысить производительность и на- дежность экскаватора за счет сокращения длительности образования и выбора слабины подъемного каната.
Формула изобретения
Система стабилизации натяжения подъемного каната экскаватора-драглайна, содержащее датчик статического тока, подключенный к релейному элементу и к первому входу первого усилителя с насыще- нием, к второму входу которого подключен
задатчик натяжения подъемного каната, датчик скорости подъемного каната, интегрирующий усилитель, выход которого соединен с первым входом сумматора, нелинейный элемент, второй релейный элемент, командоаппарат, соединенный с первым входом второго усилителя с насыщением и с первым входом устройства управления приводом подъема, выход первого усилителя с насыщением соединен с вторым входом второго усилителя с насыщением, выход которого подключен к второму входу устройства управления приводом подъема, отличающаяся тем, что, с целью сокращения длительности выбора слабины подъемного каната для повышения производительности и надежности экскаватора, она снабжена дополнительным нелинейным элементом, при этом, выход датчика скорости подъема подключен к первому входу интегрирующего усилителя и через нели- нейный элемент - в второму входу сумматор;, выход первого релейного элемента соединен с третьим входом сумматора и вторым входом интегрирующего усилителя, выход которого подключен через дополнительный нелинейный элемент к третьему входу первого усилителя с насыщением, выход сумматора подключен через второй релейный элемент к третьему входу второго усилителя с насыщением.

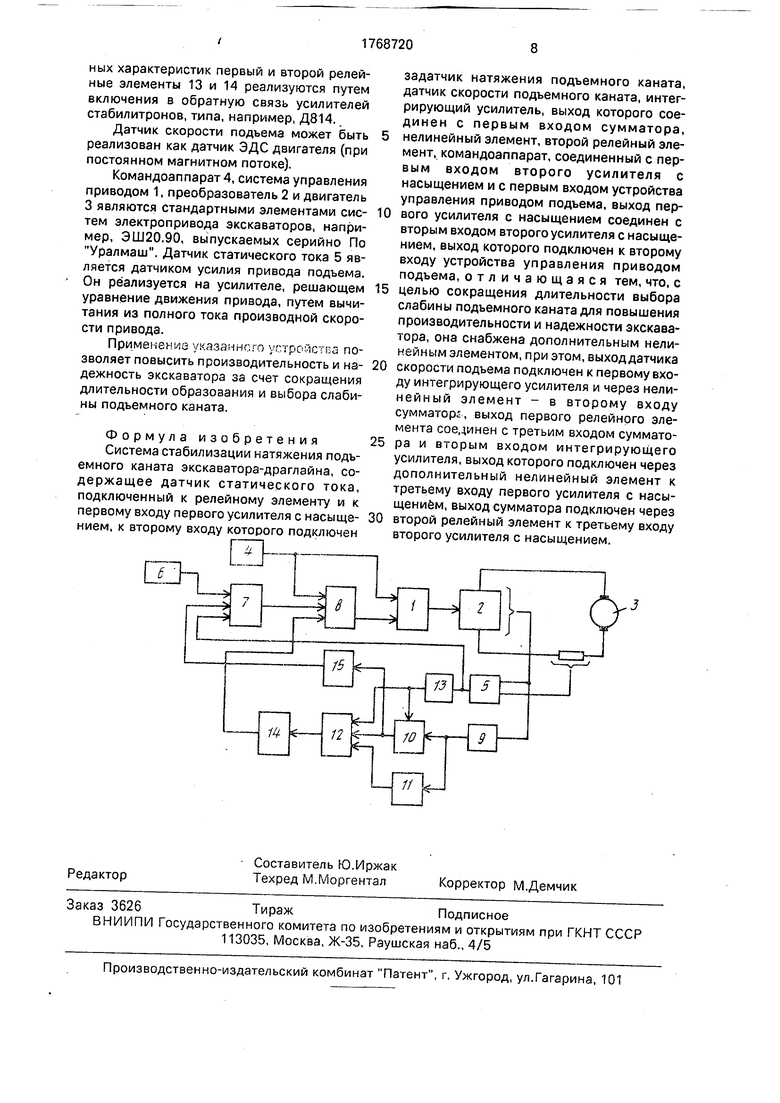
Сущность изобретения: система содержит устройство управления приводом подъема 1, преобразователь подъема 2, двигатель 3, командоаппарат 4, датчик статического тока 5, задатчик натяжения подъемного каната 6, два усилителя с насыщением 7, 8, датчик скорости подъема 9, интегрирующий усилитель 10, два нелинейных элемента 11, 15, сумматор 12, два релейных элемента 13, 14, 4-1-2-5-7-8-1, 4-8, 6-7, 5-13-12, 14-8, 2-9-10-12,13-10- 15-7,9-11-12. 1 ил.
| Система стабилизации натяжения подъемного каната экскаватора-драглайна | 1975 |
|
SU599023A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Система стабилизации натяжения подъемного каната экскаватора-драглайна | 1984 |
|
SU1232758A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
