/4
СО
с


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления электроприводами механизмов одноковшового экскаватора | 1989 |
|
SU1719561A1 |
| УСТРОЙСТВО КОМБИНИРОВАННОГО ОПТИМАЛЬНОГО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ЭКСКАВАТОРА | 1990 |
|
RU2030521C1 |
| Способ ограничения динамических нагрузок механизма поворота экскаватора и устройство для его реализации | 1990 |
|
SU1781393A1 |
| Устройство управления электроприводами копающих механизмов экскаватора | 1986 |
|
SU1511343A1 |
| Устройство управления электроприводом одноковшового экскаватора | 1986 |
|
SU1382919A1 |
| Устройство управления электроприводами эскаватора | 1986 |
|
SU1432150A1 |
| Способ ограничения динамических нагрузок копающих механизмов экскаваторов и устройство для его осуществления | 1978 |
|
SU765470A1 |
| Устройство комбинированного управления электроприводом поворота экскаватора | 1990 |
|
SU1810440A1 |
| Способ управления электроприводом напора экскаватора и устройство для его осуществления | 1986 |
|
SU1430475A1 |
| Способ управления процессом копания на одноковшовых экскаваторах и устройство для его осуществления | 1989 |
|
SU1671801A1 |

Сущность изобретения: устройство содержит регулятор 3 тока, датчик 4 тока, нелинейный элемент 5, блок 6 определения производной тока, дополнительный нелинейный элемент 7, датчик 8 усилия, блок 9 определения производной усилия, блок 10 определения вида динамического воздействия, задатчик 11, датчик 12 скорости, преобразователь 13, электродвигатель 14, блок 2 формирования переменной структуры обратных связей. 1-2-3-13-14-15-4-6-5-3 6-7-3, 12-2,12-10, 8-10, 8-9-10,11-10, 10- 2.3 ил.
фие 1
Изобретение относится к управлению копающими механизмами экскаваторов и может быть использовано для управления механизмами других промышленных установок, в которых требуется ограничивать динамические нагрузки механизмов.
Известно устройство для ограничения динамических нагрузок в экскаваторных механизмах, включающее датчик тока, датчик скорости, блок дифференцирования, нелинейный элемент, блок определения величины нагрузки, состоящий из подключенного к датчику скорости дифференциатора, выход которого подсоединен к одному из входов сумматора, второй вход сумматора соединен сдатчиком тока, а выход сумматора подключен к входу блока дифференцирования.
Однако это устройство не обеспечивает эффективного ограничения динамических нагрузок, так как полезный сигнал, пропорциональный величине статического момента сопротивления на зубьях ковша, появляется лишь кратковременно, только при резком изменении нагрузки на зубьях ковша.
Известно также устройство управления электроприводом,основанное на принципе подчиненного регулирования координат. Оно выполнено в виде двухконтурной системы подчиненного регулирования с внутренним контуром регулирования тока и внешним контуром регулирования скорости. При этом внешний контур состоит из последовательного соединения датчика скорости и регулятора скорости. Выход последнего соединен с внутренним контуром, состоящим из последовательного соединения регулятора тока, объекта управления и датчика тока.
Недостатком данного устройства является то, что хотя динамические нагрузки на привод и уменьшаются, однако в режиме жесткого стопорения ковша для приводов копающих механизмов не обеспечивается эффективное снижение коэффициента динамичности механизмов, что приводит к снижению производительности и надежности экскаватора.
Наиболее близким техническим решением к предлагаемому является устройство для ограничения динамических нагрузок копающих механизмов экскаваторов. Устройство содержит регуляторы напряжения и тока, сумматор, к выходу которого подсоединен вход управляемого преобразователя регулируемого электропривода копающего механизма, датчик тока, датчик усилия в упругих элементах копающего механизма, нелинейный элемент, датчик производной
тока, датчик производной усилия и два клю- а. Вход датчика производной тока соединен с выходом датчика тока, а выход - с одним из входов сумматора, другой вход
которого соединен с выходом датчика усилия через ключ и нелинейный элемент. Управляющий вход этого ключа соединен с выходом датчика тока, а выход сумматора соединен с входом регулятора тока через
0 другой ключ, два управляющих входа которого соединены соответственно с выходами датчика усилия и датчика производной усилия. Динамические нагрузки копающего механизма экскаватора ограничиваются
5 заданием тормозного тока двигателя в зависимости от величины усилия в упругих элементах копающего механизма. При достижении величинами усилий и его производной верхних заданных значений задает0 ся максимально допустимая величина производной тормозного тока двигателя и изменяется величина тормозного тока до стопорного значения.
Недостатком устройства является недо5 статочное ограничение динамических усилий в механической части электропривода при работе экскаватора в тяжелых грунтах что снижает надежность копающих механизмов экскаватора.
0Цель изобретения - повышение надежности копающих механизмов экскаватора путем ограничения динамических усилий в копающих механизмах экскаватора.
Сущность изобретения состоит в том,
5 что в предлагаемом техническом решении производится настройка параметров логического блока и регулятора переменной структуры, исходя из условия обеспечения в скользящем режиме постоянства динамиче0 ских нагрузок при превышении внешними воздействиями допустимых значений.
Нагрузочный режим копающего механизма определяется в логическом блоке по знаку функции усилия в упругом элементе f
5 и производной ошибки усилия в упругом элементе dxi/dt
kf+dxi/dt,(1)
где k - допустимое отношение производной усилия к усилию в упругом элементе копаю0 щего механизма, определяемое с учетом специальных номограмм для выбора значений коэффициента А - отношения допустимого значения производной усилия к усилию в зависимости от категорий грунта,
5xi f2 - f - ошибка усилия в упругом
элементе;
f2 - заданное усилие в упругом элементе.
Отрицательное значение функции (1) соответствует режимам работы с динамическими нагрузками меньшими, чем допустимые. Положительные значения функции (1) свидетельствуют о превышении динамическими нагрузками допустимых значений и о необходимости ограничения динамических нагрузок.
Ограничение динамических нагрузок при изменениях возмущающих воздействий обеспечивается обнулением в скользящем режиме функции ошибки усилия в упругом элементе и ее производной
S axi + dxi/dt,(2)
где а - весовой коэффициент.
Для этого на выходе регулятора переменной структуры формируется сигнал управления, равный
U -kvV + kxxi.(3)
коэффициенты которого изменяются последующему закону
f dv при FS О
kv (4)
(/3v при FS О fdx при Sdxi/dt 0
(5)
(/Зх при Sdxi/dt 0 и их величина
(Aan + ai2)/bi,
/3v(Aan-ai2)/bi,(6)
(A-a)bia32,
(А-а) Ьчаз2,(7)
где V - скорость двигателя;
F - возмущение, F - V + аз2 dxi/dt;
aii, 312, аз2 - коэффициенты координат объекта;
bi - коэффициент управляющего воздействия;
A(dF/dt)/(F),A const.
Поставленная цель достигается тем, что устройство для ограничения динамических нагрузок копающих механизмов экскаватора, содержащее командоаппарат, регулятор тока, нелинейный элемент, датчик тока и блок определения производной тока, вход которого соединен с ьыходом датчика тока, датчик усилия и блок определения производной усилия, вход которого соединен с выходом датчика усилия, дополнительно снабжено задатчиком, блоком определения вида динамического воздействия, датчиком скорости, блоком формирования переменной структуры обратных связей и дополнительным нелинейным элементом. При этом к первому входу блока определения вида динамического воздействия подключен датчик усилия, к второму - блок определения производной усилия и к третьему - задат- чик, а четыре выхода блока определения вида динамического воздействия подключены к первому - четвертому входам блока
формирования переменной структуры обратных связей, к пятому входу которого подключен командоаппарат, а датчик скорости подключен к четвертому входу блока определения вида динамического воздействия и к шестому входу блока формирования переменной структуры обратных связей, выход которого подключен к первому входу регулятора тока, выход блока определения про0 изводной тока через дополнительный нелинейный элемент подключен к второму входу регулятора тока, а датчик тока через нелинейный элемент подключен к третьему входу регулятора тока.
5 На фиг. 1 изображена функциональная схема устройства для ограничения динамических нагрузок копающих механизмов экскаватора; на фиг. 2 - принципиальная схема блока определения вида динамического
0 воздействия; на фиг. 3 - принципиальная схема регулятора переменной структуры.
Устройство (фиг. 1) содержит командоаппарат 1, соединенный с пятым входом блока 2 формирования переменной структу5 ры обратных связей, выход которого соединен с первым входом регулятора 3 тока. Датчик 4 тока через нелинейный элемент 5 и через последовательно соединенные блок 6 определения производной тока и дополни0 тельный нелинейный элемент 7 подсоединен соответственно к третьему и второму входам регулятора 3 тока. Датчик 8 усилия в упругих элементах копающего механизма подсоединен непосредственно и через блок
5 9 определения производной усилия соответственно к первому и второму входам блока 10 определения вида динамического воздействия, к третьему входу которого подключен задатчик 11 производной усилий в
0 упругих элементах.
Выход датчика 12 скорости подсоединен к шестому входу блока 2 формирования переменной структуры обратных связей и четвертому входу блока 10 определения ви5 да динамического воздействия, четыре выхода которого подключены к первому - четвертому входам блока 2 формирования переменной структуры обратных связей. Выход регулятора 3 тока, являющийся выхо0 дом устройства для ограничения динамических нагрузок копающих механизмов экскаватора, подсоединен к входу управляемого преобразователя 13, выход которого соединен с якорной цепью электродвига5 теля 14, в которую включен шунт 15, соединенный с входом датчика 4 тока.
Изобретение осуществляют следующим образом.
По сигналам с датчика 8 усилий в упругих элементах, блока 9 определения производной усилий, датчика 12 скорости и задат- чика 11 производной усилий в блоке определения вида динамического воздействия определяются согласно (1) значения функции, характеризующей нагрузочный режим работы копающего механизма, сигнал ошибки усилия, сигналы управления изменением коэффициентов управления (3) согласно (4) и (5). Все полученные в блоке 10 определения вида динамического воздейст- вия сигналы вместе с сигналом с датчика 12 скорости поступают в блок 2 формирования переменной структуры обратных связей. В зависимости от знака функции (1) на вход блока 2 проходит либо сигнал с командоап- парата 1 (режим регулирования скорости при динамических нагрузках меньше допустимых), либо управление вида (3), обеспечивающее постоянство динамических нагрузок при превышении внешними воз- мущениями допустимых значений. Величи- ны коэффициентов управления устанавливаются в блоке 2 в соответствии с (6) и (7).
Сигнал с выхода блока 2 поступает на первый вход регулятора 3 тока, на третий и второй входы которого поступают задания на максимально допустимые значения тока якорной цепи двигателя 14 и его производной. Они формируются соответственно на нелинейном элементе 5 и дополнительном нелинейном элементе 7 по сигналу тока якорной цепи, снимаемому с шунта 15. При этом на нелинейный элемент 5 сигнал поступает через датчик 4 тока, а на дополнитель- ный нелинейный элемент 7 - через датчик 4 тока и блок 6 определения производной тока.
Сигнал с выхода регулятора 3 тока поступает на вход преобразователя 13, с по- мощью которого осуществляется управление электродвигателем 14 копающего механизма экскаватора,
Таким образом, предлагаемое устройство по сравнению с устройством-прототипом обеспечивает при работе экскаватора в скальных и других грунтах средней и повышенной крепости более эффективное (на 25-30%) уменьшение динамических нагрузок копающих механизмов, что приводит к повышению надежности экскаватора.
Пример конкретного исполнения блоков определения вида динамического воздействия и формирования переменной структуры обратных связей представлен на фиг. 2 и 3 в виде принципиальных электрических схем блоков,
Логический блок 11 состоит (фиг. 2) из пяти сумматоров , трех инвертирующих усилителей 21-23, интегратора 24, двух
множителей 25 и 26, трех опорных диодов 27-29 и коммутирующего элемента, состоящего из модуля 30 управления и размыкающего контакта 31. Первый сумматор 16 реализован на усилителе 32, входных резисторах 33 и 34, резисторе 35-обратной связи. Первый вход первого сумматора 16 соединен с первым входом логического блока, второй вход первого сумматора соединен с выходом второго сумматора 17, первым входом третьего сумматора 18 и первым входом четвертого сумматора 19. Второй сумматор
17реализован на усилителе 36, входных резисторах 37 и 38, резисторе 39 обратной связи; третий сумматор 18 - на усилителе 40, входных резисторах 41 и 42, резисторе 43 обратной связи; четвертый сумматор - на усилителе 44, входных резисторах 45 и 46, резисторе 47 обратной связи, Второй вход четвертого сумматора 19 соединен с вторым входом логического блока 11 и первым входом пятого сумматора 20, реализованного на усилителе 48, входных резисторах 49 и 50, резисторе 51 обратной связи.
Выход четвертого сумматора 19 через первый опорный диод 27 и первый инвертирующий усилитель 21, реализованный на усилителе 52, входном резисторе 53 и резисторе 54 обратной связи, подсоединен к модулю 30 управления коммутирующего элемента и к первому выходу логического блока 11. Первый и второй входы второго сумматора 17 соединены соответственно с третьим и четвертым входами логического блока 11. К четвертому входу логического блока 11 подсоединен и вход интегратора 24. Интегратор 24 реализован на усилителе 55, во входную цепь которого включен регулируемый резистор 56, а в цепи обратной связи параллельно включены конденсатор 57, два встречно включенных диода 58 и 59 и размыкающий контакт 31 коммутирующего элемента. Выход интегратора 24 подсоединен к второму входу пятого сумматора 20, выход которого соединен с вторым входом третьего сумматора 18, первым входом первого множителя 25, и второму входу логического блока 11. Выход третьего сумматора
18соединен с вторыми входами первого 25 и второго 26 множителей.
Выход первого множителя 25 через второй опорный диод 26 и второй инвертирующий усилитель 22, реализованный на усилителе 60, входном резисторе 61 и резисторе 62 обратной связи, подсоединен к третьему выходу логического блока 11. Выход первогр сумматора 16 подсоединен к первому входу второго множителя 26, выход .которого через третий опорный диод 29 и третий инвертирующий усилитель 23, peaлизованный на усилителе 63, входном резисторе 64 и резисторе 65 обратной связи, подсоединен к четвертому выходу логического блока 11.
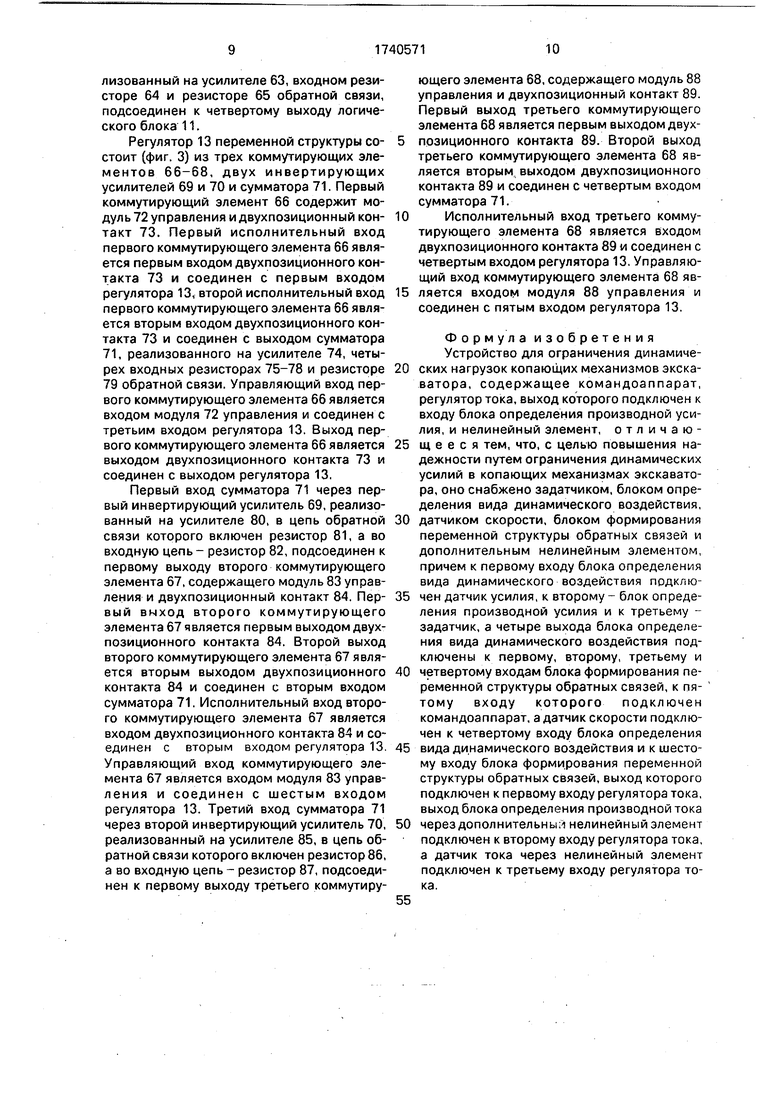
Регулятор 13 переменной структуры состоит (фиг. 3) из трех коммутирующих элементов 66-68, двух инвертирующих усилителей 69 и 70 и сумматора 71. Первый коммутирующий элемент 66 содержит модуль 72 управления и двухпозиционный контакт 73. Первый исполнительный вход первого коммутирующего элемента 66 является первым входом двухпозиционного контакта 73 и соединен с первым входом регулятора 13, второй исполнительный вход первого коммутирующего элемента 66 является вторым входом двухпозиционного контакта 73 и соединен с выходом сумматора 71, реализованного на усилителе 74, четырех входных резисторах 75-78 и резисторе 79 обратной связи. Управляющий вход первого коммутирующего элемента 66 является входом модуля 72 управления и соединен с третьим входом регулятора 13. Выход первого коммутирующего элемента 66 является выходом двухпозиционного контакта 73 и соединен с выходом регулятора 13.
Первый вход сумматора 71 через первый инвертирующий усилитель 69, реализованный на усилителе 80, в цепь обратной связи которого включен резистор 81, а во входную цепь - резистор 82, подсоединен к первому выходу второго коммутирующего элемента 67, содержащего модуль 83 управления и двухпозиционный контакт 84, Первый выход второго коммутирующего элемента 67 является первым выходом двухпозиционного контакта 84. Второй выход второго коммутирующего элемента 67 является вторым выходом двухпозиционного контакта 84 и соединен с вторым входом сумматора 71. Исполнительный вход второго коммутирующего элемента 67 является входом двухпозиционного контакта 84 и соединен с вторым входом регулятора 13.
Управляющий вход коммутирующего элемента 67 является входом модуля 83 управления и соединен с шестым входом регулятора 13. Третий вход сумматора 71 через второй инвертирующий усилитель 70, реализованный на усилителе 85, в цепь обратной связи которого включен резистор 86, а во входную цепь - резистор 87, подсоединен к первому выходу третьего коммутирующего элемента 68, содержащего модуль 88 управления и двухпозиционный контакт 89. Первый выход третьего коммутирующего элемента 68 является первым выходом двухпозиционного контакта 89. Второй выход третьего коммутирующего элемента 68 является вторым выходом двухпозиционного контакта 89 и соединен с четвертым входом сумматора 71.
Исполнительный вход третьего коммутирующего элемента 68 является входом двухпозиционного контакта 89 и соединен с четвертым входом регулятора 13. Управляющий вход коммутирующего элемента 68 является входом модуля 88 управления и соединен с пятым входом регулятора 13.
Формула изобретения Устройство для ограничения динамических нагрузок копающих механизмов экскаватора, содержащее командоаппарат, регулятор тока, выход которого подключен к входу блока определения производной усилия, и нелинейный элемент, отличающ е е с я тем, что, с целью повышения надежности путем ограничения динамических усилий в копающих механизмах экскаватора, оно снабжено задатчиком, блоком определения вида динамического воздействия,
датчиком скорости, блоком формирования переменной структуры обратных связей и дополнительным нелинейным элементом, причем к первому входу блока определения вида динамического воздействия прдключен датчик усилия, к второму - блок определения производной усилия и к третьему - задатчик, а четыре выхода блока определения вида динамического воздействия подключены к первому, второму, третьему и
четвертому входам блока формирования переменной структуры обратных связей, к пятому входу которого подключен командоаппарат, а датчик скорости подключен к четвертому входу блока определения
вида динамического воздействия и к шестому входу блока формирования переменной структуры обратных связей, выход которого подключен к первому входу регулятора тока, выход блока определения производной тока
через дополнительны.- нелинейный элемент подключен к второму входу регулятора тока, а датчик тока через нелинейный элемент подключен к третьему входу регулятора тока.
| УСТРОЙСТВО ДЛЯ ОГРАНИЧЕНИЯ ДИНАМИЧЕСКИХ НАГРУЗОК В ЭКСКАВАТОРНЫХ МЕХАНИЗМАХ | 1972 |
|
SU412354A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Чиликин М.Г., Ключев В.И., Сандлер А.С | |||
| Теория автоматизированного электропривода | |||
| - М.: Энергия, 1979, с | |||
| СТЕРЕООЧКИ | 1920 |
|
SU291A1 |
| Способ ограничения динамических нагрузок копающих механизмов экскаваторов и устройство для его осуществления | 1978 |
|
SU765470A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
