Изобретение относится к электротехнике и может быть использовано в приводах вибротранспортировки, виброобкатке, в системах активной компенсации продольных колебаний валопроводов, в экспериментальных измерительных комплексах, где области потребных амплитуд и частот колебаний составляют по угловым координатам град, 10 2-102 Гц, по линейным координатам 10 -10 мм, 1-10 Гц при стабильности амплитуды до 1%, частоты до 0,1% и фазы до 2%.
Предлагаемый колебательный привод является дополнительным к авт.св. № 1307530, содержащему двухфазный двигатель со статором и ротором, статорные обмотки которого подключены к двум источникам переменного тока различной частоты и в котором с целью повышения КПД
и мощности привода на роторе выполнены две обмотки, подключенные параллельно обмоткам статора.
Однако в данном электроприводе отсутствует регулировка собственной частоты колебаний, что не позволяет в широком частотном диапазоне поддерживать в колебательном электроприводе энергетически выгодный резонансный режим работы.
Целью изобретения является улучшение энергетических характеристик колебательного электропривода, уменьшение его массогабаритных показателей и повышение надежности системы в целом.
Поставленная цель достигается подключением к выходам задающих генераторов колебательного электропривода по авт. св. № 1307530 преобразователя разности частот в напряжение и управляющего своим
Ч
ГО Јь
ю
ю
выходом коэффициентом передачи по крайней мере одного из задающих генераторов. Благодаря этому производится регулировка позиционного электромагнитного усилия машины двойного питания путем пропорционального регулирования фазных напряжений электродвигателя в зависимости от требуемой частоты колебаний подвижного элемента привода по закону Q/y const.
Здесь круговая частота колебаний подвижного элемента привода Q (fi-f2), где fi,T2 - частоты задающих генераторов; - У2 коэффициент сигнала по напряжению задающих генераторов;
} l Um1/UmH; y2 Um2/UmH, причем Um1, Um2
- амплитудные значения выходных напряжений задающих генераторов; Утн - номи- нальное амплитудное значение напряжения управления исполнительным двигателем.
Так как амплитуда колебаний подвижного элемента колебательного электропривода определяется как
Кц
Тпуск
(р - ТднЙ)2 + («мех + fA)2 где fnycK пусковой электромагнитный момент исполнительного двигателя; Тдн - электромеханическая постоянная времени учитывающая инерционность двигателя и нагрузки; р - коэффициент позиционного усилия; емех,тд относительные коэффициенты механического и электромагнитного демпфирования, то для обеспечения резонансного режима работы колебательного электропривода необходимо, чтобы в колебательной системе присутствовало позиционное усилие и выполнялось следующее условие:
/э Тд„-Й (2)
Коэффициент электромагнитного позиционного усилия машины двойного пи- тания, развиваемого за счет взаимодействия электромагнитных полей статора и ротора, определяется параметрами электрической машины и функциями регулирования источников питания как
РЭМ 0,5 rg 11тн (XT ti + $ 12), (3) где kg - обобщенный силовой коэффициент, учитывающий тип электропривода (углового или линейного движения); Т1Д2 постоянные коэффициенты, определяемые параметрами электрической машины.
Согласно выражениям (2) и (3) для обеспечения резонансного режима работы коле- бательного электропривода в заданном
10
15
20
25
30
35
40
45
50
55
частотном диапазоне необходимо при изменении частоты колебаний Qпропорционально регулировать коэффициенты сигналов yi у2 у по закону ЈУХ сопзт.
Введение преобразователя разности частот в напряжение в состав колебательного электропривода по авт.св. № 1307530 и снабжение по крайней мере одного из задающих генераторов частоты управляющим входом позволяет регулировать электромаг- нитное позиционное усилие машины двойного питания в зависимости от частоты колебаний подвижного элемента, что обеспечивает новые свойства электропривода.
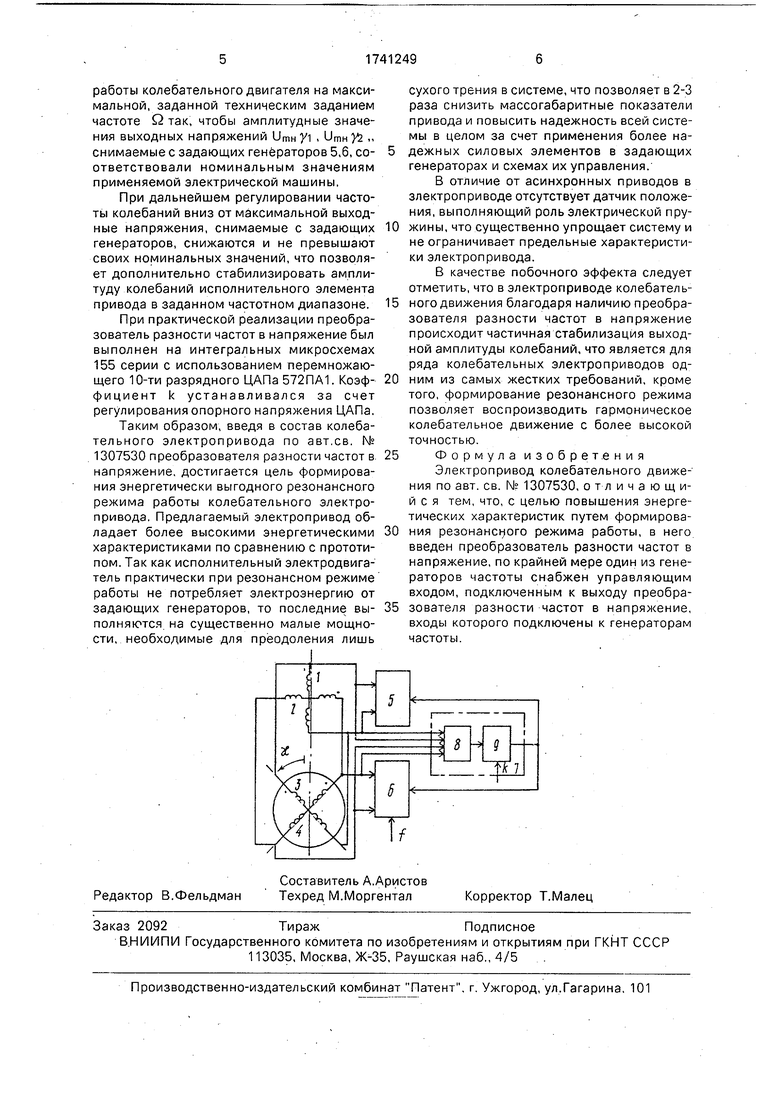
На чертеже приведена структурная схема предлагаемого электропривода.
Электропривод содержит двухфазный исполнительный двигатель, имеющий две взаимоперпендикулярные обмотки 1. 2 на статоре и 3,4 на роторе, два задающих генератора 5,6, преобразователь разности частот в напряжение 7, включающий в себя блок преобразования разности частот 8 и ЦАП 9.
Преобразователь работает следующим образом.
Статорные 1,2 и роторные 3,4 обмотки двигателя соединены параллельно и подключены к генераторам 5,6, напряжение которых изменяется по законам
Ui(t) Цлн yi sin (ton + a) ;
U2(t)UmH Yl Sin (ftfct +/3).
где &м,У2 круговые частоты и начальные фазы а,/ питающих напряжений. Выходная частота an 2 jrfi одного из задающих генераторов 5 фиксирована и равна паспортной частоте питания исполнительного двигателя, а другая У2 2л:т2 генератора 6 перестраивается в зависимости от требуемой частоты колебаний Q, которая определяется как Q - (1)1.
Преобразователь разности частот в напряжение 7 подключен своими входами к выходам задающих генераторов 5,6 и преобразует сперва разностную частоту Q в параллельный код 8 с последующим преобразованием последнего на ЦАПе 9 в напряжение постоянного тока.
Снимаемое с преобразователя 7 напряжение с заданным коэффициентом усиления k пропорционально регулирует выходные напряжения задающих генераторов 5,6 по закону
Q/y const.
Настройкой коэффициента к(блок 9) добиваются для заданных параметров двигателя и нагрузки резонансного режима
работы колебательного двигателя на максимальной, заданной техническим заданием частоте Q так, чтобы амплитудные значения выходных напряжений итнУ1 , „ снимаемые с задающих генераторов 5,6, соответствовали номинальным значениям применяемой электрической машины.
При дальнейшем регулировании частоты колебаний вниз от максимальной выходные напряжения, снимаемые с задающих генераторов, снижаются и не превышают своих номинальных значений, что позволяет дополнительно стабилизировать амплитуду колебаний исполнительного элемента привода в заданном частотном диапазоне.
При практической реализации преобразователь разности частот в напряжение был выполнен на интегральных микросхемах 155 серии с использованием перемножающего 10-ти разрядного ЦАПа 572ПА1. Коэффициент к устанавливался за счет регулирования опорного напряжения ЦАПа.
Таким образом, введя в состав колебательного электропривода по авт св. № 1307530 преобразователя разности частот в напряжение, достигается цель формирования энергетически выгодного резонансного режима работы колебательного электропривода. Предлагаемый электропривод обладает более высокими энергетическими характеристиками по сравнению с прототипом. Так как исполнительный электродвигатель практически при резонансном режиме работы не потребляет электроэнергию от задающих генераторов, то последние выполняются на существенно малые мощности, необходимые для преодоления лишь
сухого трения в системе, что позволяет в 2-3 раза снизить массогабаритные показатели привода и повысить надежность всей системы в целом за счет применения более надежных силовых элементов в задающих генераторах и схемах их управления.
В отличие от асинхронных приводов в электроприводе отсутствует датчик положения, выполняющий роль электрической пружины, что существенно упрощает систему и не ограничивает предельные характеристики электропривода.
В качестве побочного эффекта следует отметить, что в электроприводе колебательного движения благодаря наличию преобразователя разности частот в напряжение происходит частичная стабилизация выходной амплитуды колебаний, что является для ряда колебательных электроприводов одним из самых жестких требований, кроме того, формирование резонансного режима позволяет воспроизводить гармоническое колебательное движение с более высокой точностью.
Формула изобретения
Электропривод колебательного движения по авт. св. № 1307530, отличающийся тем, что, с целью повышения энергетических характеристик путем формирования резонансного режима работы, в него введен преобразователь разности частот в напряжение, по крайней мере один из генераторов частоты снабжен управляющим входом, подключенным к выходу преобразователя разности частот в напряжение, входы которого подключены к генераторам частоты.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОПРИВОД КОЛЕБАТЕЛЬНОГО ДВИЖЕНИЯ | 2016 |
|
RU2629946C1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОПРИВОД КОЛЕБАТЕЛЬНОГО ДВИЖЕНИЯ | 2017 |
|
RU2677682C1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОПРИВОД КОЛЕБАТЕЛЬНОГО ДВИЖЕНИЯ | 2016 |
|
RU2636806C2 |
| ЭЛЕКТРОПРИВОД КОЛЕБАТЕЛЬНОГО ДВИЖЕНИЯ С РЕГУЛИРУЕМЫМ ЗАКОНОМ КОЛЕБАНИЙ | 1993 |
|
RU2072621C1 |
| Электропривод колебательного движения | 1985 |
|
SU1307530A1 |
| ЭЛЕКТРОПРИВОД КОЛЕБАТЕЛЬНО-ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ | 2015 |
|
RU2592080C1 |
| Способ управления синхронным двигателем в режиме колебаний | 2019 |
|
RU2706340C1 |
| ЭЛЕКТРОПРИВОД ПЕРИОДИЧЕСКОГО ДВИЖЕНИЯ | 1998 |
|
RU2148293C1 |
| СПОСОБ УПРАВЛЕНИЯ СИНХРОННЫМ ДВИГАТЕЛЕМ В РЕЖИМЕ КОЛЕБАНИЙ | 1991 |
|
RU2025890C1 |
| УСИЛИТЕЛЬ МАГНИТНОГО ПОТОКА И СИЛОВЫЕ ЭЛЕКТРОТЕХНИЧЕСКИЕ УСТРОЙСТВА НА ЕГО ОСНОВЕ | 2000 |
|
RU2201001C2 |
Использование: виброприводы с высокой стабильностью частоты. Сущность изобретения: колебательный электропривод содержит двухфазный двигатель с параллельными обмотками статора 1,2 и ротора 3,4, подключенными к выходам генераторов частоты 5 и 6, а также преобразователь 7 разности частоты в напряжение, подключенный своими входами к генераторам 5,6 и управляющий коэффициентом передачи генераторов 5,6. Вследствие этого производится изменение позиционного электромагнитного усилия машины двойного питания путем пропорционального регулирования фазных напряжений в зависимости от требуемой частоты колебаний. При этом колебательный электропривод работает в энергетически выгодном резонансном режиме, позволяющем иметь предельно допустимые выходные характеристики колебательного комплекса при минимальных габаритных размерах. 1 ил. (Л С
| Электропривод колебательного движения | 1985 |
|
SU1307530A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
