W
Ё

| название | год | авторы | номер документа |
|---|---|---|---|
| Станок для намотки катушек | 1989 |
|
SU1767676A1 |
| УСТРОЙСТВО ДЛЯ ПРОДОЛЬНОЙ НАДВИЖКИ ПРОЛЕТНОГО СТРОЕНИЯ МОСТА | 2006 |
|
RU2313629C1 |
| Коммутатор отпаек трансформатора | 1991 |
|
SU1778890A1 |
| ПОДЪЕМНО-ТРАНСПОРТНОЕ УСТРОЙСТВО | 1997 |
|
RU2134771C1 |
| Земснаряд | 1983 |
|
SU1135858A1 |
| Сварочный трансформатор | 1988 |
|
SU1563910A1 |
| Устройство для обследования внутренней поверхности промышленных вентиляционных и дымовых труб | 2022 |
|
RU2780468C1 |
| Способ контроля возвратного конденсата | 1990 |
|
SU1740706A1 |
| Преобразователь переменного напряжения в переменное | 1989 |
|
SU1697224A1 |
| Система подводного позиционирования устройства типа "купол" для ликвидации подводных разливов нефти | 2019 |
|
RU2714336C1 |
Использование: обследование внутренней поверхности дымовых труб энергетических станций. Сущность: устройство содержит опоры, закрепленные на оголовке трубы, платформу, подвешенную на тяговом тросе, систему контроля, дополнительную опору, подвешенную на тросах к основным опорам с возможностью перемещения поперек трубы, блок управления стопорными механизмами и подключенный к его входу датчик скорости перемещения платформы. 4 ил.
Изобретение относится к технологическому оборудованию для обследования внутренней поверхности дымовых труб энергетических станций.
Известно устройство для проверки внутренней части дымовых труб, состоящее из корзины, подвешенной на двух канатах на балке балансира, установленной на оголовке трубы, лебедки, установленной снаружи трубы и связанной тросами с корзиной. Данное устройство может быть использовано для цилиндрических труб диаметром 1,5- 3 м. Причем обследование трубы в этом устройстве осуществляется человеком, размещенным в корзине. Однако такое устройство непригодно для обследования дымовых труб энергетических станций, размеры которых колеблются по высоте от 80 до 350 м и по диаметру от 7 до 26 м (у
основания) и которые зауживаются кверху при этом степень скоса составляет 2-3%.
Наиболее близким по технической сущности к предлагаемому является устройство для текущего осмотра внутренней части труб (дымоходов), содержащее платформу, состоящую из фиксированного модуля и элементов, шарнирно соединенных с ним и позволяющих изменять его конфигурацию, подвешенную на тяговых тросах к стрелам, установленным на оголовке трубы, подъемное устройство, установленное на платформе и кинематически связанное с тяговыми тросами, балансир, стабилизирующие тросы, закрепленные на стрелах и балансире и проходящие через направляющие в платформе, стопорные механизмы, установленные на платформе и кинематически связанные со стабилизирующими стросами.
VJ
N
Ю N
сл
Os
Данное устройство позволяет осуществлять (за счет изменения конфигурации платформы) обследование зауживающихся кверху дымовых труб с указанными параметрами. Однако в данном устройстве про- ведение осмотра осуществляется человеком, находящимся на платформе, что в случае аварийного состояния футеровки трубы или подъемных механизмов устройства может привести к ситуации, опасной для жизни человека.
Кроме того, так как конструктивные элементы платформы должны обеспечивать в предельном случае площадку диаметром до 25 м, то весовые и габаритные характери- стики такой платформы должны быть значительными, что требует применения мощных подъемных механизмов. Размещение последних непосредственно на платформе также ведет к неоправданному увеличению ее весовых характеристик.
Не обеспечивает данное устройство и документирование результатов обследования.
Цель изобретения - повышение надеж- ности.
Поставленная цель достигается тем, что устройство, содержащее опоры, закрепленные на оголовке трубы, лебедку, установленную снаружи трубы, первый и второй полиспастные блоки, платформу, подвешенную на тяговом тросе, проходящем через блоки и кинематически связанном с барабаном лебедки, балансир, проходящие через направляющие платформы стабили- зирующие тросы, одни концы которых закреплены на балансире, стопорные механизмы, установленные на платформе и кинематически связанные со стабилизирующими тросами, систему контроля, снабже- но блоком управления стопорными механизмами, подключенным к его входу датчиком скорости перемещения платформы вдоль вертикальной оси трубы, установленным на платформе и кинематически связанным со стабилизирующими тросами, и дополнительной опорой, подвешенной на тросах к основным опорам с возможностью перемещения поперек трубы, при этом первый полиспастный блок установлен на до- полнительной опоре, второй - на одной из основных, а вторые концы стабилизирующих тросов закреплены на дополнительной опоре.
Устройство отличается от известного тем, что система контроля выполнена в виде телекамеры, первого устройства наведения, первого модуля управления, видеоконтрольного устройства, что позволяет исключить присутствие человека внутри трубы в
процессе обследования, а также осуществить документирование результатов обследования - запись дефекта футеровки и на носитель. Ввод в систему контроля блока смешивания сигналов, датчика обратной связи по углу разворота и датчика перемещения вдоль оси трубы позволил одновременно с записью телесигнала изображения дефекта футеровки осуществлять запись координат дефекта, как по высоте, так и по углу разворота.
Ввод блока управления стопорными механизмами и подключенным к его входу датчика скорости перемещения платформы позволил не только стопорить платформу в аварийных ситуаци-ях, но и в случае расположения в момент аварии платформы на вершине трубы (обрыв тягового троса) осуществить ее спуск и процесс обследования футеровки трубы без применения лебедки. Применение дополнительной опоры, подвешенной на тросах к основным опорам с возможностью перемещения поперек трубы позволило реализовать подвеску устройства на трубах любых диаметров, а также осуществить оптимальную ориентацию платформы по отношению к трубе с учетом ее конструктивных особенностей.
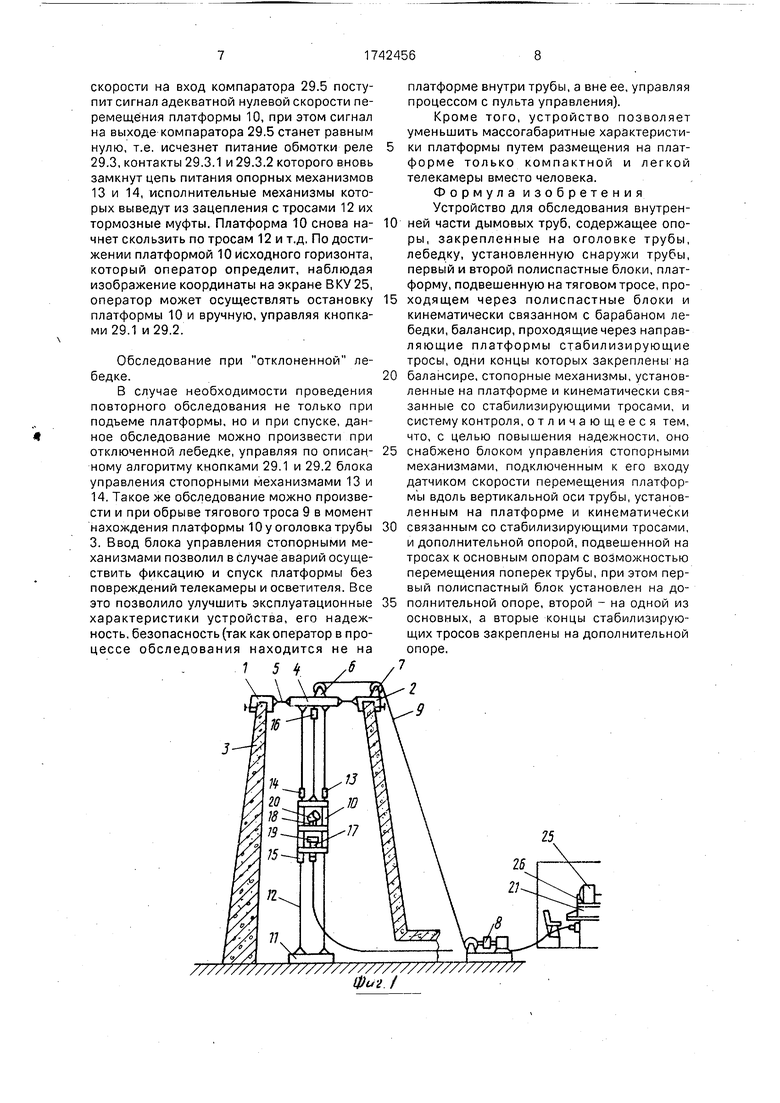
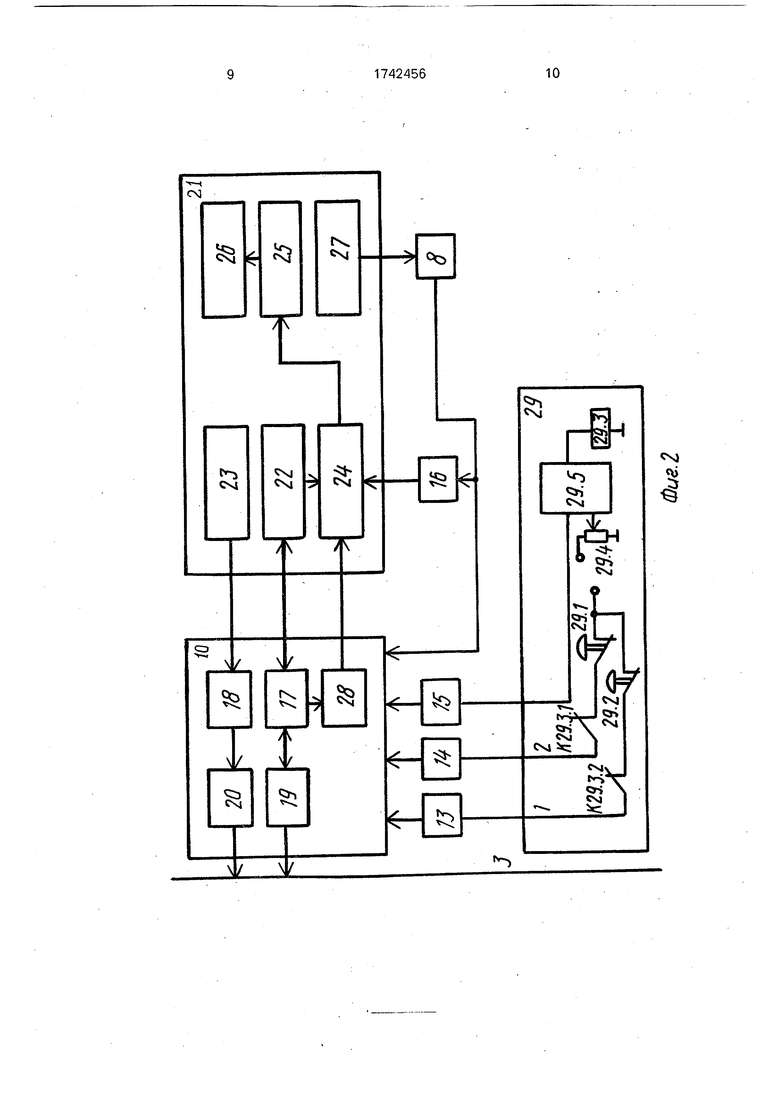
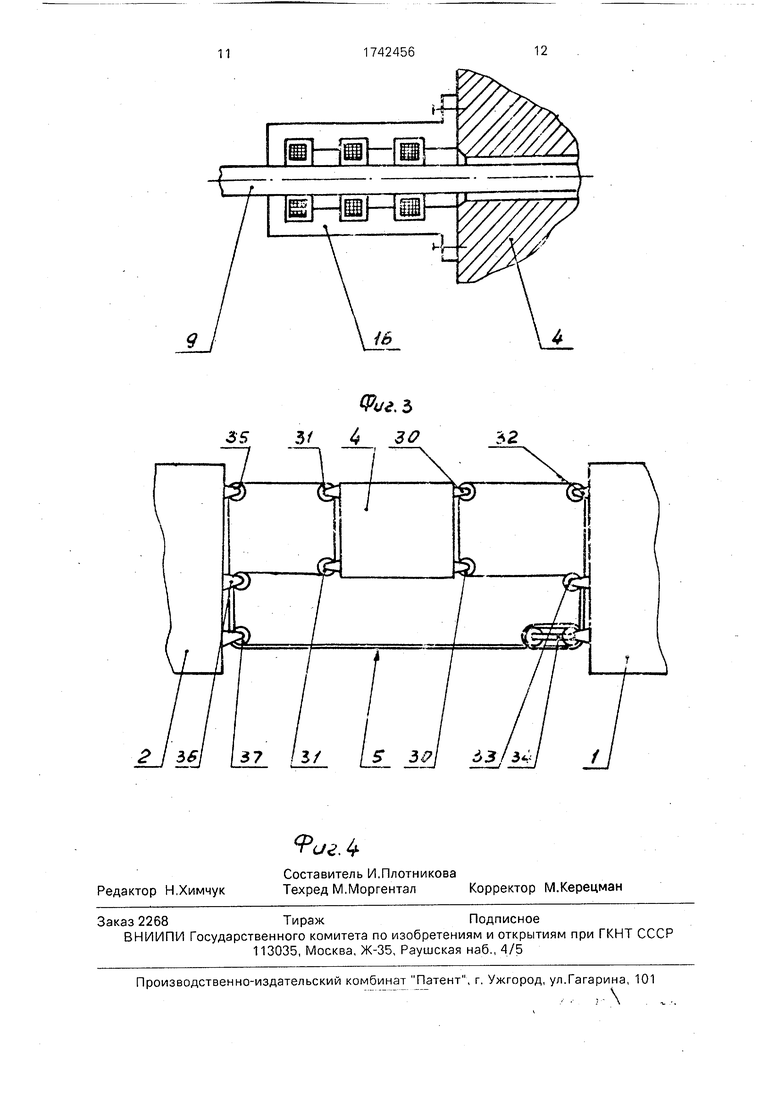
На фиг. 1 представлено устройство, смонтированное на трубе, общий вид; на фиг, 2 - функциональная блок-схема системы контроля и блока управления стопорными механизмами; на фиг. 3 - выполнение датчика перемещения платформы; на фиг. 4 - кинематическая схема тросовой подвески дополнительной опоры.
Устройство содержит (фиг. 1) основные опоры 1 и 2, закрепленные на оголовке трубы 3, дополнительную опору 4, подвешенную на тросах 5 к основным опорам 1 и 2, первый полиспастный блок 6, установленный на дополнительной опоре 4, второй полиспастный блок, установленный на одной из основных, например на опоре 2,лебедку
8,установленную снаружи трубы 3, тяговый трос 9, проходящий через полиспастные блоки 6 и 7 и закрепленный одним концом на барабане лебедки 8, платформу 10, закрепленную на втором конце тягового троса
9,балансир 11, установленный внутри трубы 3, стабилизирующие тросы 12, проходящие через платформу 10 и закрепленные на балансире 11 и дополнительной опоре 4, стопорные механизмы 13 и 14 и датчик 15 скорости перемещения платформы, установленные на платформе 10 и кинематически связанные со стабилизирующими тросами 12, систему контроля, включающую датчик 16 перемещения платформы вдоль оси трубы 3, установленный на опоре 4 и
кинематически связанный с тросом 9, устройства 17 и 18 наведения, установленные на платформе 10, телекамеру 19 и осветитель 20, установленные на устройствах наведения 17 и 18, пульт 21 управления устройством.
Пульт 21 управления системы контроля (фиг. 2) выполнен в виде первого 22 и второго 23 модулей управления устройствами 17, 18 наведения, блока 24 смешивания сигналов, видеоконтрольного устройства 25 с видеомагнитофоном 26, третьего модуля 27 управления. Кроме того, устройство 17 наведения имеет датчик 28 обратной связи по углу разворота.
При этом телекамера 19, устройство 17 наведения и модуль 22 управления последовательно электрически соединены, выход модуля 22 управления подключен к первому входу блока 24 смешивания сигналов, второй вход которого подключен к датчику 28 обратной связи, третий - к датчику 16 перемещения платформы 10, а выход - к входу видеоконтрольного устройства (ВКУ) 25, к выходу которого подключен видеомагнитофон 26, осветитель 20, устройство 18 наведения, модуль 23 управления последовательно соединены, а модуль 27 управления подключен к лебедке 8.
Кроме, того, устройство содержит (фиг. 2) блок 29 управления стопорными механизмами 13 и 14, к входу которого подключен датчик 15 скорости перемещения платформы 10.
Блок 29 управления содержит кнопки 29.1 и 29.2, реле 29.3, задатчик 29.4, компаратор 29.5, первый вход которого является входом блока 29, второй вход компаратора подключен к задатчику 29.4, а выход - к обмотке реле 29.3, размыкающие контакты 29.3.1 и 29.3.2 которого подключены одними клеммами к первому и второму выходам блока 29 соответственно, а другими - к кнопкам 29.1 и 29.2.
Кинематическая схема подвески дополнительной опоры 4 (фиг. 4) содержит блоки 30 и 31, установленные на опоре 4, блоки 32 и 33 и полиспаст 34, установленные на опоре 1, блоки 35 и 36 и сдвоенный блок 37, установленные на опоре 2, при этом трос 5 последовательно проходит через блоки 33, 30 и 32, полиспаст 34 и блоки 37, 35, 31 и 36 и образует замкнутый контур. На блоке полиспастов установлена ручка (не показана).
Устройство позволяет реализовать следующие режимы работы:
а)обследование в нормальном режиме работы;
б)стопорение платформы в аварийной ситуации;
в) обследование при отключенной лебедке.
Нормальный режим работы. Сначала производят монтаж опор 1,2,4 на оголовке трубы 3, балансира 11 и платформы 10 в газоходе трубы, затем зачаливают тяговый 9 и стабилизирующие 12 тросы и закрепляют их на платформе 10, балансире 11 и опоре 4, при этом тяговый трос 9
0 пропускают через блоки 6 и 7 и датчик 16 перемещения, а стабилизирующие тросы 12 - через стопорные механизмы 13 и 14, направляющие платформы 10 и датчик 15 скорости перемещения. Платформу 10
5 соединяют кабелем (не обозначен) с пультом 21 управления. Платформа 10 находится в исходном положении внутри трубы 3 над балансиром 11. После натяжения тросов 12 и подачи питания устройство готово к рабо0 те. Органами управления 22 и 23 управления оператор включает телекамеру 19, выбирает нужный уровень освещенности поверхности осветителем 20 и согласует положение устройств 17 и 18 наведения На
5 экран ВКУ 25 через блок 24 смешивания сигналов поступает изображение исходного обследуемого сектора и информация от датчиков 16 и 28 о исходной координате, которую оператор записывает на
0 видеомагнитофон 26. Затем оператор с модулей 22 и 23 управления управляет устройствами 17 и 18 наведения, разворачивая осветитель 20 и телекамеру 19 и просматривая область данного горизонта. В случае
5 обнаружения дефекта оператор записывает его изображение и координаты на видеомагнитофон. После просмотра данного горизонта оператор модулем 27 управления включает лебедку 8 и перемещает платфор0 му 10 на следующий горизонт вверх по трубе 3. Повторяет операцию обследования следующего горизонта и т.д. до оголовка трубы 3.
Стопорение платформы в аварийной си5 туации.
Такая ситуация может создаваться при обрыве тягового троса 9. В этом случае платформа 10 начнет падать вниз, скользя по стабилизирующим тросам 12, при этом с
0 датчика 15 скорости на вход компаратора 29.5 будет поступать сигнал, адекватный скорости перемещения платформы 10. Когда этот сигнал превысит значение сигнала, поступающего от задатчика 29.4. на второй
5 вход компаратора 29.5, последний подаст питание на обмотку реле 29.3, которое своими контактами 29.3.1 и 29.3.2 отключит питание стопорных механизмов 13 и 14, тормозные муфты которых зажмут тросы 12 и застопорят платформу 10. С датчика 15
скорости на вход компаратора 29.5 поступит сигнал адекватной нулевой скорости перемещения платформы 10, при этом сигнал на выходе компаратора 29.5 станет равным нулю, т.е. исчезнет питание обмотки реле 29.3, контакты 29.3.1 и 29.3.2 которого вновь замкнут цепь питания опорных механизмов 13 и 14, исполнительные механизмы которых выведут из зацепления с тросами 12 их тормозные муфты. Платформа 10 снова на- чнет скользить по тросам 12 и т.д. По достижении платформой 10 исходного горизонта, который оператор определит, наблюдая изображение координаты на экране ВКУ 25, оператор может осуществлять остановку платформы 10 и вручную, управляя кнопками 29.1 и 29.2.
Обследование при отклоненной лебедке.
В случае необходимости проведения повторного обследования не только при подъеме платформы, но и при спуске, данное обследование можно произвести при отключенной лебедке, управляя по описан- ному алгоритму кнопками 29.1 и 29.2 блока управления стопорными механизмами 13 и 14. Такое же обследование можно произвести и при обрыве тягового троса 9 в момент нахождения платформы 10 у оголовка трубы 3. Ввод блока управления стопорными механизмами позволил в случае аварий осуществить фиксацию и спуск платформы без повреждений телекамеры и осветителя. Все это позволило улучшить эксплуатационные характеристики устройства, его надежность, безопасность (так как оператор в процессе обследования находится не на
///////////.
платформе внутри трубы, а вне ее, управляя процессом с пульта управления).
Кроме того, устройство позволяет уменьшить массогабаритные характеристики платформы путем размещения на платформе только компактной и легкой телекамеры вместо человека.
Формула изобретения Устройство для обследования внутренней части дымовых труб, содержащее опоры, закрепленные на оголовке трубы, лебедку, установленную снаружи трубы, первый и второй полиспастные блоки, платформу, подвешенную на тяговом тросе, про- ходящем через полиспастные блоки и кинематически связанном с барабаном лебедки, балансир, проходящие через направляющие платформы стабилизирующие тросы, одни концы которых закреплены на балансире, стопорные механизмы, установленные на платформе и кинематически связанные со стабилизирующими тросами, и систему контроля, отличающееся тем, что, с целью повышения надежности, оно снабжено блоком управления стопорными механизмами, подключенным к его входу датчиком скорости перемещения платформы вдоль вертикальной оси трубы, установленным на платформе и кинематически связанным со стабилизирующими тросами, и дополнительной опорой, подвешенной на тросах к основным опорам с возможностью перемещения поперек трубы, при этом первый полиспастный блок установлен на дополнительной опоре, второй - на одной из основных, а вторые концы стабилизирующих тросов закреплены на дополнительной опоре.
Фи-г /
| Способ выработки двойного прессового начесного трикотажного полотна и кругловязальная многосистемная машина для осуществления способа | 1954 |
|
SU112384A1 |
| Машина для изготовления проволочных гвоздей | 1922 |
|
SU39A1 |
| УСТРОЙСТВО ДЛЯ ФИКСАЦИИ РАБОЧЕГО ИНСТРУМЕНТА ПЕРФОРАТОРА | 1992 |
|
RU2026980C1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
