-N
ю оо
;ы
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивное устройство измерения частоты | 1990 |
|
SU1812516A1 |
| Устройство для моделирования электрических машин | 1988 |
|
SU1597886A1 |
| СПОСОБ ИЗМЕРЕНИЯ СРЕДНЕГО ЗНАЧЕНИЯ НАПРЯЖЕНИЯ ПРОИЗВОЛЬНОЙ ФОРМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2034302C1 |
| Устройство для управления асинхронным электроприводом | 1990 |
|
SU1830609A1 |
| Способ широтно-импульсного преобразования напряжения и широтно-импульсный модулятор | 1986 |
|
SU1361709A1 |
| Адаптивное устройство обнаружения и аналого-дискретного преобразования сигналов | 2018 |
|
RU2684643C1 |
| УСТРОЙСТВО ДЛЯ ЭЛЕКТРОННОЙ ОБРАБОТКИ ТЕЛЕВИЗИОННЫХ СИГНАЛОВ | 1976 |
|
SU1840947A1 |
| Устройство для управления частотно-регулируемым асинхронным электроприводом | 1991 |
|
SU1793527A1 |
| ФОРМИРОВАТЕЛЬ СИНХРОНИЗИРУЮЩИХ ИМПУЛЬСОВ | 2001 |
|
RU2183378C1 |
| Функциональный аналого-цифровой преобразователь | 1983 |
|
SU1113813A1 |
Изобретение относится к вычислительной технике и может быть использовано в вычислительных машинах непрерывного действия. Цель изобретения - повышение точности, что достигается тем, что устройство работает в режиме динамического слежения, позволяющем осуществить прецизионное формирование уровня ограничения. В устройстве моделирования, содержащем блок моделирования скорости, олок моделирования отклонения, олок задания уровней ограничения, источники опорного напряжения положительной и отрицательной полярности, первый и второй компараторы, первый, второй и третий ключи, введенные связи позволяют осуществить динамическое слежение за уровнем ограничения выходного напряжения. При этом исключается погрешность, связанная с влиянием второго компаратора для определения полярности входного напряжения, а также погрешность выходного напряжения, определяемые дрейфом второго интегратора и noi- решностям ограничителя. Совокупность признаков проявляет новое свойство: автоматизация поиска полярности входного напряжения без использования компаратора определения полярности. 2 ил. k
Изобретение относится к вычислительной технике и может быть использовано в вычислительных машинах непрерывного действия при моделировании нелинейных систем автоматического регулирова ния.
Известна модель двухстороннего ограничителя механических перемещений, содержащая два последовательно соединенных интегрирующих, звена (звено моделирования скорости перемещения и звено моделирования величины перемещения) и звено нелинейности типа упор. Достоинством модели является ее простота.
Однако она недостаточно точна из- за ряда составляющих структурной
погрешности, определяемых как самими звеньями, так и взаимодействием их.
Наиболее близким по технической сущности к предлагаемому устройству является устройство для моделирования двухстороннего ограничителя механических перемещений исполнительных механизмов, которое с целью повышения точности содержит блок моделирования скорости механического звена (первый интегратор), блок моделирования угла поворота механического звена (второй интегратор), блок ограничения, инвертор, первый и второй ключи с контактными группами„
При подаче напряжения на вход модели (вход первого интегратора, вход инвертора и управляющий вход второго ключа) второй ключ, в зависимости от полярности входного напряжения, подключает управляющий вход первого ключа к соответствующему выходу блока ограничения, подготавливая его к срабатыванию при заданном уровне ограничения выходного напряжения модели, которое подается на вход блока ограничения. Замыкающиеся контакты первого ключа между выходом инвертора и вторым входом первого интегратора, а также контакты в обнуляющей цепи первого интегратора разомкнуты. Напряжения на выходах первого и второго интеграторов увеличиваются по абсолютной величине„ При достижении выходным напряжением второго интегратора (выходное напряжение модели) уровня ограничения, первая группа контактов первого ключа подключает выход инвертора к второму входу первого интегратора, а вторая группа контактов подключает резистор параллельно интегрирующему конденсатору первого интегратора, превращая его в суммирующее инерционное звено, формирующее нулевое входное напряжение для второго интегратора, т„е« обеспечивающее перевод его в режим памяти.
При изменения полярности входного напряжения состояние второго ключа изменяется, и контакты его переключают управляющий вход первого ключа к противофазному выходу блока ограничения, при этом контактные группы первого ключа размыкаются, отключая выход инвертора от второго входа первого инвертора и отключая обнуляющий резистор от интегрирующего
конденсатора первого интегратора. Выходное напряжение модели начинает изменяться в сторону противоположной
полярности, и процесс повторяется до и после достижения второго уровня ограничения. Достоинством этой модели по сравнению с первой является структурное обеспечение перевода мо0 дели в режим памяти при достижении выходным напряжением любого из двух уровней ограничения и более точный переход состояния модели на режим изменения выходного напряжения от
5 одного уровня ограничения до другого, обеспеченный введением ключа определения полярности входного напряжения.
Недостатком модели является недостаточно высокая точность, так как
0 при малой крутизне входного напряжения проявляется динамическая погрешность, что обусловлено конечным значением чувствительности ключа, стоящего на входе устройства и из5 менением этой чувствительности от климатических и временных факторов. Дрейф операционных усилителей инвертора и интеграторов приводит к тому, что напряжение на входе второго ин0 тегратора в режиме ограничения выходного напряжения модели (в режиме памяти) не равно нулю, что приводит к самоходу - изменению уровня выходного напряжения в зоне, близкой к уровню ограничения, что в свою очередь приводит к запаздыванию нахождения расчетного значения выходного напряжения модели после изменения полярности входного напряжения моде- я ли Звено ограничения, включающее в качестве элемента сравнения диод, обладает значительной эксплуатационной погрешностью (порядка десятков милливольт) формирования уровня ограниче ния. Использование в схеме устройства моделирования прецизионного ограничителя не решит проблемы Прецизионный огрангчитель с диодом и дополнительным усилителем - компаратором в
Q цепи обратной связи второго интегратора позволяет обеспечить формирование уровня ограничения с высокой точностью, однако влияние цепи обратной связи (дополнительный усилитель и - обратное сопротивление диода) оказы- (вается существенным, особенно при больших постоянных времени второго интегратора, так как ограничитель включает в себя структурную погреш5
ность от дополнительного (суммирующего) входа второго интегратора. Приведенные недостатки могут оказаться определяющими при использовании модели для широкого диапазона значений входного напряжения, его частоты и значений постоянных времени второго интегратора t
Целью изобретения является повышение точности.
Поставленная цель достигается тем, что в устройство для моделирования, содержащее блок моделирования скорости, выполненный в виде первого интегратора, вход которого является входом устройства, блок моделирования отклонения, выполненный в виде второго интегратора, выход которого является выходом устройства, блок формирования уровней ограничения, источники опорного напряжения положительной и отрицательной полярности, подключенные к входам блока формирования уровней ограничения, первый, второй и третий ключи, выход первого интегратора через первый ключ соединен с входом обнуления первого интегратора, первый и второй компараторы, вводится элемент ИЛИ, выход которого подключен к управляющим входам первого и второго ключей, выход второго ключа соединен с входом второго интегратора, выход которого соединен с первыми входами первого и второго компаратора, выходы которых соединены с соответствующими входами элемента ИЛИ, выход второго компаратора соединен с управляющим входом третьего ключа, первый и второй информационные входы которого соединены с выводами источников опорного напряжения положительной и отрицательной полярности соответственно, первый и второй выходы блока формирования уровней ограничения подключены к вторым входам первого и второго компараторов соответственно, выход первого интегратора подключен к первому информационному входу второго ключа, второй информационный вход которого соединен с выходом третьего ключа.
Первый ключ в устройстве осуществляет сравнение выходного напряжения второго интегратора с опорным напряжением, он назван первым компаратором, а включающие группы этого ключа названы первым и вторым ключами соот17 2837
6
0
5
0
5
0
5
0
5
5
ветственно. Второй ключ в устройстве осуществляет сравнение не входного напряжения модели с нулевым уровнем, а выходного напряжения модели с опорным уровнем и назван вторым компаратором, а переключающая группа этого ключа названа третьим ключом.
Сущность изобретения заключается в том, что з предлагаемом устройстве моделирования в режиме ограничения осуществляется динамическое слежение за уровнем ограничения выходного напряжения, при этом исключается подключение к входу модели ком- пар аторз определения полярности входного напряжения, т.е исключаются структурные и динамические погрешности, связанные с конечным значением чувствительности этого компаратора Использование режима динамического слежения позволяет осуществить прецизионное формирование уровня ограничения без влияния ограничителя на режим интегрирования второго интегратора в широком температурном диапазоне.
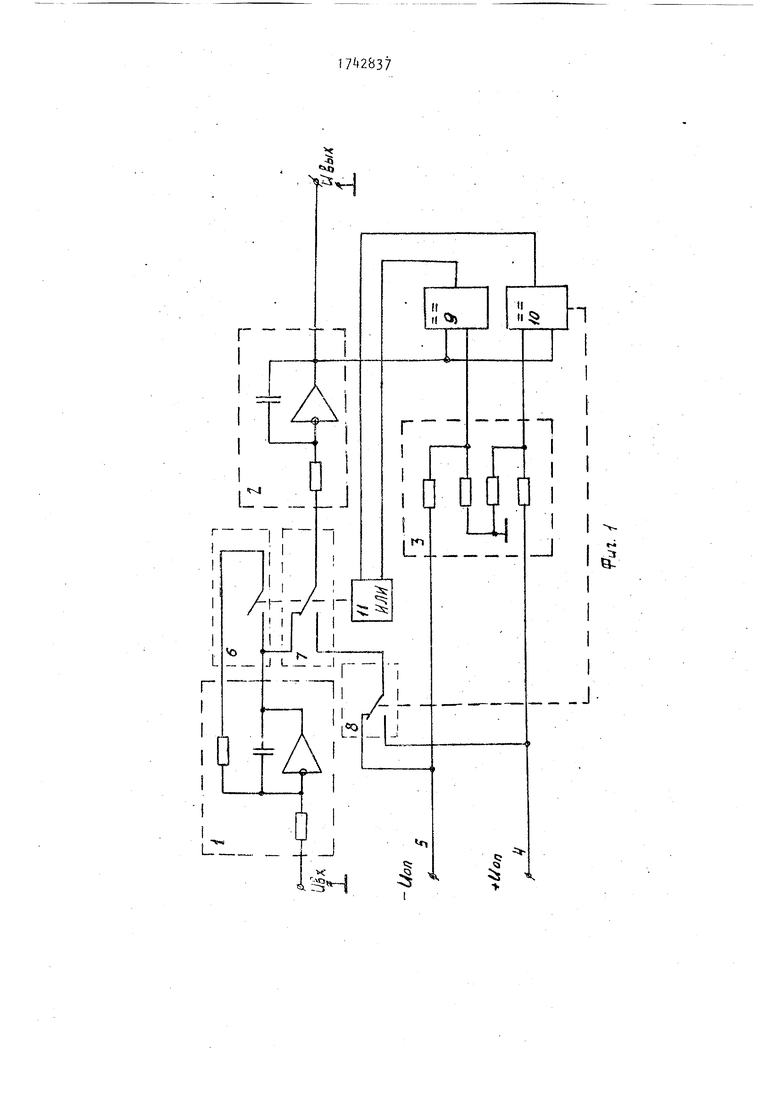
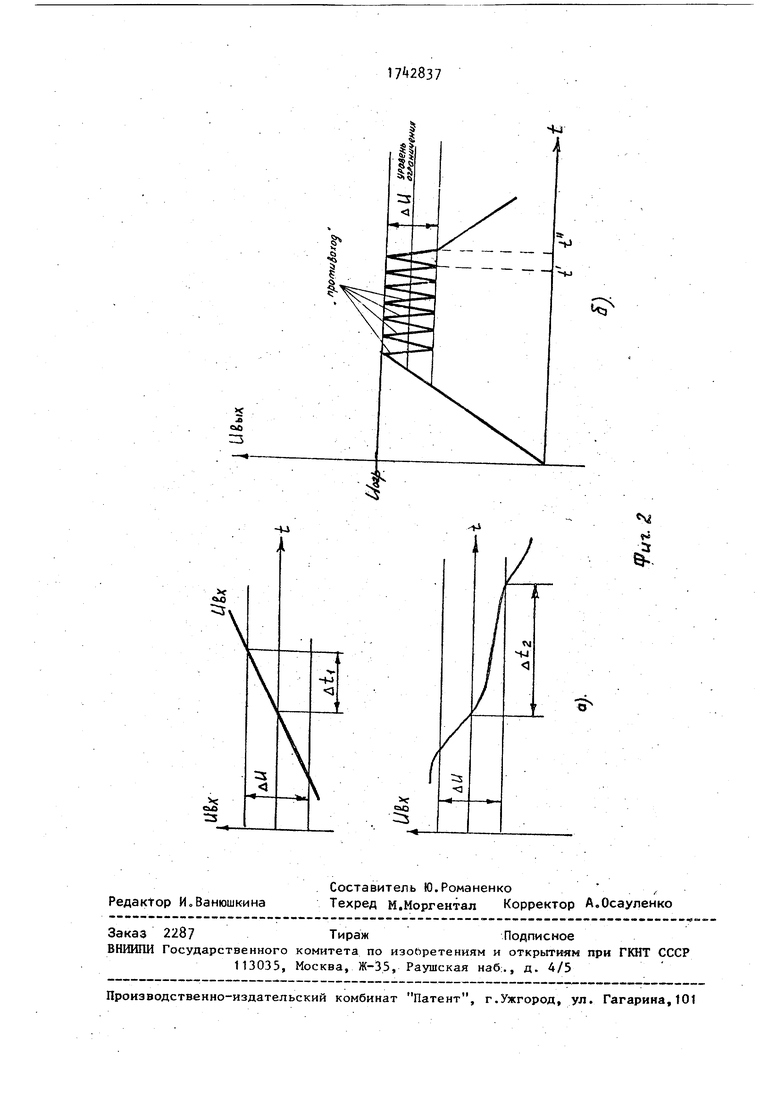
На фиг Л приведена функциональная схема устройства моделирования; на фиг.2 - диаграммы, поясняющие проявление погрешности в известной модели и работу предлагаемого устройства вблизи уровня ограничения выходного напряжения,
Устройство содержит первый интегратор 1, второй интегратор 2, блок
3формирования уровней ограничения, источник 4 опорного напряжения положительной полярности, источник 5 опорного напряжения отрицательной полярности 5„ первый ключ 6„ второй ключ 7, третий ключ 8Р первый компаратор У5 второй компаратор 10 и элемент ИЛИ 11.
Вход первого интегратора 1 является входом устройства Выход первого интегратора 1 через нормально замкнутые контакты второго ключа 7 соединен с входом второго интегратора 2, аыход которого является выходом устройства и подключен к первым входам первого компаратора 9 и второго компаратора 10, вторые входы -которых подключены к соответствующим выходам блока формирования уровней ограничения 3« Опорный источник положительной полярности
4подключен к первому входу блока формирования уровней ограничения 3 к нормально разомкнутому контакту
третьего ключа 8, опорный источник отрицательной полярности 5 подключен к второму входу блока формирования уровней ограничения 3 и к нормально
замкнутому контакту третьего ключа 8, переключающий контакт которого соединен с нормально разомкнутым контактом второго ключа 7. Управляющий вход третьего ключа 8 соединен с выходом второго компаратора 10, который совместно с выходом первого компаратора Э соединен с соответствующими входами элемента ИЛИ 11, выход которого подключен к управляющим входам второго ключа 7 и первого ключа 6, включенного в обнуляющую цепь первого интегратора 1с
Устройство работает следующим образомс
При положительных значениях входного напряжения напряжение на выходе первого интегратора 1 нарастает в области значений отрицательной полярности, а напряжение на выходе второго интегратора 2 нарастает в области значений положительной полярности. При достижении выходным напряжением второго интегратора 2 уровня, равного значению опорного напряжения положительной полярности (уровень ограничения), второй компаратор 10 срабатывает, обеспечивая через элемент ИЛИ 11 с помощью второго ключа 7 отключение входа второго интегратора 2 от выхода первого интегратора 1, который в свою очередь обнуляется через первый ключ 6. Срабатывание второго компаратора 10 с помощью третьего ключа 8 обеспечивает подключение входа второго интегратора 2 к источнику опорного напряжения положительной полярности 4, при этом напряжение на выходе второго интегратора 2 начинает уменьшаться (фиг.26) и при выходе из зоны чувствительности второго компаратора 10 первый ключ 6, второй ключ 7 и третий ключ 8 приходят в исходное состояние. Если в этот момент (или до него) не произошло изменения полярности входного напряжения первого интегратора 1, то выходное напряжение второго ратора 2 снова нарастает до момента срабатывания второго компаратора 10. Процесс повторяется до тех пор, пока не произойдет изменения полярности входного напряжения, например, в интервале времени между t и
fr
при этом выходное напряжение
5
5
0
второго интегратора 2 изменяется до подхода к гвторому уровню ограничения,
срабатывания первого компаратора 9, срабатывания первого ключа 6 и второго ключа 7. Процесс динамического слежения выходного напряжения второго интегратора 2 за вторым уровнем ограничения и выход из режима слежения аналогичен приведенному выше.
В предлагаемом моделирующем ройстве точностные параметры улучшены, погрешность уровня ограничения выходного напряжения не зависит от дрейфовых составляющих первого и второго интеграторов и определяется только разрешающей способностью первого и второго компараторов.
Предлагаемая структура устройства моделирования позволяет устранить динамическую и структурную погрешность, связанные с определением полярности входного сигнала, так как компаратор полярности входного сигнала отсутствует на входе устройства, а также устранить влияние структурной погрешности блока моделирования скорости на функционирование второго интегратора вблизи уровня ограничения, так как при этом обеспечивается отключение его от входа блока моделирования угла отклонения механического звена (второго интегратора).
В устройстве моделирования реализуется прецизионное ограничение, но без влияния ограничителя на выходной уровень модели до режима ограничения. Динамическая погрешность моделирования при отходе выходного напряжения от уровня ограничения минимизируется, так как в режиме ограничения обеспечивается периодический протиаохо выходного напряжения второго интегратора.
На фиг.2а приведены верменные диаграммы(, поясняющие возникновение (динамической) погрешности известной модели, т.е. отставание реакции моде- ® ли (ut, или At2) из-за конечного значения чувствительности ключа (&.U) определения полярности входного напряжения. Значения дц или k.t будут тем больше, чем меньше крутизна изменения входного напряжения и его величина по сравнению с &U. В предлагаемом устройстве эти погрешности полностью исключены.
5
0
S
5
t и t (фиг.26), то выходное напря
у1
Погрешность формирования уровня ограничения в предлагаемом устройств не зависит от дрейфовых составляющих первого и второго интеграторов и определяется только разрешающей способностью первого и второго компараторо т.в реализуется прецизионное ограничение без влияния цепей ограничителя на выходной уровень модели до режима ограничения.
Динамическая погрешность моделирования с помощью предлагаемого устройства (фиг.2а) при отходе выходного напряжения от уровня ограничения минимизируется, т.к„ в режиме ограничения (нахождения выходного напряжения в зоне UU вблизи уровня ограничения) обеспечивается проти- воход выходного напряжения второго интегратора, т.е„ если изменение полярности входного напряжения модели произойдет в момент времени между
шло t с рабочей постоянжение модели уже жения с момента
ной времени от воздействия опорного источника, а начиная с момента времени t изменяется под воздействием выходного напряжения первого интегратора (схема приходит в исходное состояние), причем вся зона Д11 составляет несколько единиц милливольт.
Предлагаемое устройство реализовано на элементах широкого применения: интеграторы на базе операционных усилители 153 УД6 или УД 7; компараторы на базе 521 САЗ (Аи 3 мВ) первый и второй ключа на МС 59 узел ИЛИ - диодная матрица 2ДС627А, третий ключа на МС 590 КН.
Формула изобретения
Устройство для моделирования двухстороннего ограничителя механических
в сторону пони-
10
o
5
0
5
0
5
0
5
перемещении исполнительных механизмов, содержащее блок моделирования скорости механического звена, выполненный в виде первого интегратора, вход которого является входом приложенной силы устройства, блок моделирования отклонения, выполненный в виде второго интегратора, выход которого является выходом угла отклонения устройства, блок формирования уровней ограничения, источники опорного напряжения соответственно положительной и отрицательной полярности, выводы которых подключены к первому и второму входам блока формирования уровней ограничения соответственно, первый, второй и третий ключи, выход первого интегратора через первый ключ соединен с входом обнуления первого интегратора, первый и второй компараторы, отличающиеся тем, что, с целью повышения точности, в него введен элемент ИЛИ, выход которого подключен к управляющим входам первого и второго ключей, выход второго ключа соединен с входом второго интегратора, выход которого соединен с первыми входами первого и второго компараторов, выходы кото- ;рыз соединены с соответствующими входами элемента ИЛИ, выход второго компаратора соединен с управляющим входом третьего ключа, первый и I второй информационные входы которого соединены с выводами источников опорного напряжения положительной и отрицательной полярности соответственно, первый и второй выходы блока формирования уровней ограничения подключены к вторым входам первого и второго компараторов соответственно, выход первого интегратора подключен к первому информационному входу второго ключа, второй информационный .вход которого соединен с выходом третьего ключа.
-w
Vc
vo
a
N
/
l
f
Ј
M
4J
Л
3
1
| Корн Г„, Корн Т, Электронные аналоговые и аналого-цифровые вычислительные машины | |||
| - М : Мир, 1968, с | |||
| Солесос | 1922 |
|
SU29A1 |
| Авторское свидетельство СССР № , кл G Об G 7Л8, 1982о ( УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ДВУХСТОРОННЕГО ОГРАНИЧИТЕЛЯ МЕХАНИЧЕСКИХ ПЕРЕМЕЩЕНИЙ ИСПОЛНИТЕЛЬНЫХ МЕХАНИЗМОВ | |||
