уЮ
/7 /V7
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО С КОМПЛЕКСИРОВАННЫМИ НОСИТЕЛЯМИ РАВНОМЕРНЫХ УГЛОВЫХ ШКАЛ РАЗНОЙ ДИСКРЕТНОСТИ ДЛЯ КАЛИБРОВКИ УГЛОЗАДАЮЩИХ И УГЛОМЕРНЫХ ПРИБОРОВ | 2012 |
|
RU2489682C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДВУГРАННЫХ УГЛОВ ЗЕРКАЛЬНО-ПРИЗМЕННЫХ ЭЛЕМЕНТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2523736C1 |
| УСТРОЙСТВО БАЗИРОВАНИЯ МНОГОГРАННЫХ ПРИЗМ | 2019 |
|
RU2711610C1 |
| ОПТИКО-МЕХАНИЧЕСКОЕ УГЛОМЕРНОЕ УСТРОЙСТВО ПОВОРОТНОГО ТИПА С ОПТИЧЕСКИМ УКАЗАТЕЛЕМ НА ОСНОВЕ МНОГОЗНАЧНОЙ МЕРЫ И ФОТОЭЛЕКТРОННЫМ РЕГИСТРАТОРОМ | 2007 |
|
RU2377498C2 |
| СПОСОБ ПРОВЕРКИ ПОГРЕШНОСТЕЙ КРУГОВОЙ ШКАЛЫ ПОВОРОТНОГО СТОЛА | 2022 |
|
RU2790074C1 |
| Устройство для преобразования углового положения вала в частоту следования импульсов | 1975 |
|
SU525849A1 |
| СПОСОБ КАЛИБРОВКИ ГРУППЫ СРЕДСТВ ИЗМЕРЕНИЙ ПЛОСКОГО УГЛА С СУММАРНЫМ ДИАПАЗОНОМ ШКАЛ НЕ МЕНЕЕ 360° | 2007 |
|
RU2377499C2 |
| ИСПЫТАТЕЛЬНЫЙ СТЕНД | 2011 |
|
RU2488777C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТЕЙ ИЗГОТОВЛЕНИЯ ДВУХГРАННЫХ УГЛОВ ЗЕРКАЛЬНО-ПРИЗМЕННЫХ ЭЛЕМЕНТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2010 |
|
RU2431801C1 |
| Устройство для измерения плоского угла | 1972 |
|
SU494599A1 |
Изобретение относится к измерительной технике и может быть использовано для поверки датчиков угловых перемещений. Цель изобретения - повышение разрешающей способности задатчика. До задания углов юстируют задатчик путем перемещения призмы 4 вместе с призмой 8, т.е вращая шестерню 3 до нулевого показания автоколлиматора 9. Затем с помощью двигателя 5 и шестерен 6 и 7 перемещают призму 8 до нулевого значения автоколлиматора 10. Для задания углов с помощью двигателя 1 задают m угловых положений вала и с помощью двигателя 5 устанавливают соответствующие нулевые положения. Повторяют операции по заданию новой серии угловых положений. При этом количество неповторяемых устанавливаемых положений вала поворотного столика равно mn/m-n Количество граней п призмы 4 не кратно количеству m граней призмы 8. 1 ил. (Л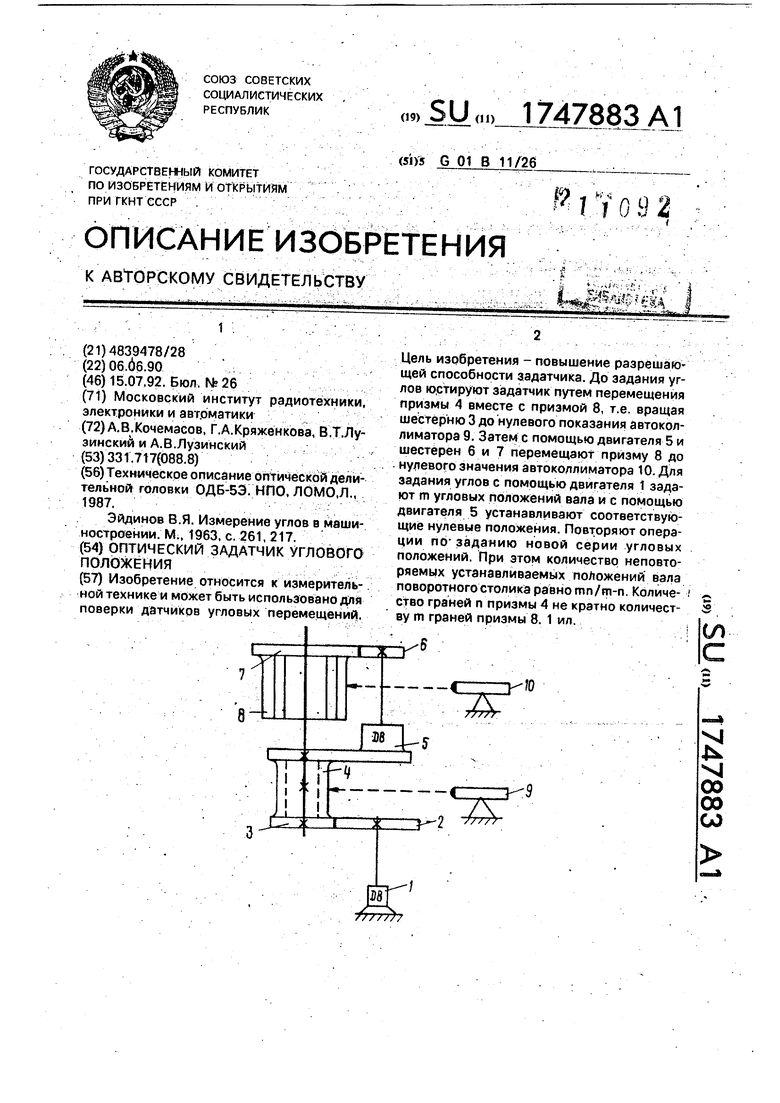
г--V-3
////7
2
XI
00 00
ы
Изобретение относится к измерительной технике и может быть использовано, в частности поверки датчиков угловых перемещений.
Известен задатчик углового положения, содержащий привод и оптический диск с делительным лимбом, установленным на неподвижной части.
Достоинством такого задатчика является- значительное количество контролируемых точек, характеризующих разрешающую способность.
Однако данный задатчик характеризуется недостаточной точностью.
Наиболее близким к предлагаемому является оптический задатчик углового положения, содержащий корпус, установленный в нем поворотный столик с приводом вращения, закрепленную на столике многогранную отражательную призму и закрепленный в корпусе автоколлиматор, оптически связанный с призмой.
Достоинством известного устройства является малое значение погрешности задаваемого углового положения.
Однако разрешающая способность данного устройства ограничена количеством граней призмы, что является существенным недостатком.
Цель изобретения - повышение разрешающей способности задатчика.
Поставленная цель достигается тем, что оптический задатчик углового положения, содержащий корпус, установленный в нем поворотный столик с приводом вращения, закрепленную на столике многогранную отражательную призму и закрепленный в корпусе автоколлиматор, оптически связанный с призмой, дополнительно снабжен закрепленными на столике приводным механизмом и валом, установленным соосно с призмой, дополнительной многогранной отражательной призмой, установленной на валу с возможностью вращения и кинематически связанной с приводным механизмом, и закрепленным в корпусе дополнительным автоколлиматором, оптически связанным с дополнительной призмой, количество граней у которой не кратно количеству граней у основной призмы.
На чертеже представлена блок-схема устройства.
Устройство состоит из корпуса, установленного на нем поворотного столика с приводом вращения, состоящим из двигателя 1 и пары шестерен 2 и 3. Оси столика и шестерни 3 совмещены. На валу столика закреплена многогранная отражательная призма 4. На оси поворотного столика закреплен приводной механизм, содержащий
двигатель 5 и пару шестерен 6 и 7. На шестерне 7 закреплена вторая многогранная отражательная призма 8, которая вместе с шестерней 7 расположена соосно с осью
призмы 4. Призма 8 имеет возможность вращения относительно призмы 4. Автоколлиматор 9 закреплен в корпусе задатчика и оптически связан с многогранной призмой 4, а автоколлиматор 10 закреплен также в
корпусе, но оптически связан с многогранной призмой 8, количество граней которой не кратно количеству граней призмы 4. В качестве примера принято, что количество граней призмы 4 равно п, а количество граней призмы 8 равно т, В частном случае оптические оси обоих автоколлиматоров расположены в одной плоскости.
Оптический задатчик работает следующим образом.
Перед началом задания углов задатчик юстируют, перемещая призму 4 вместе с призмой 8 с помощью привода вращения, т.е. вращая шестерню 3 до нулевого значения показаний автоколлиматора 9. После этого с помощью приводного механизма, т.е. двигателя 5 и шестерен 6 и 7, перемещают призму 8 до нулевого значения автоколлиматора 10. Такое положение оси
задатчика принимают за первое нулевое положение. Для задания углов поворачивают ось поворотного столика с помощью двигателя 1 в постоянно выбранном направлении и фиксируют его при последующих нулевых
значениях автоколлиматора 10, задавая таким образом m угловых положений. Далее с помощью двигателя 1 привода вращения поворачивают вал столика в выбранном направлении до ближайшего показания нулевого значения автоколлиматора 9, после чего с помощью двигателя 5 приводного механизма поворачивают призму 8 до нулевого значения показаний автоколлиматора 10, устанавливая второе нулевое положение.
Затем повторяют операции по заданию новой серии m угловых положений.
Таким образом, оптические операции повторяют, и в первой серии устанавливаются значения угловых положений 360°К/т,
где К - 1,2,...т, а в последующих сериях измерения - (360°К/т) + (360°N/n), где N - 1,2...п. Таким образом, минимальная дискретность задачи углового положения равна
Дет- 360° (- - - ).а количество неповторяГ ill
емых устанавливаемых положений вала по- воротного столика равно
360°/(360°(--J- )° Ш .Откуда
П ГПи П
следует, что только при количестве граней п
призмы 4 не кратном количеству граней m призмы 8 может быть получен положительный эффект. Таким образом, по сравнению с известным устройством разрешающая способность задатчика угловых перемещеm
rjr п) раз При
ний увеличивает в(
этом точность задаваемых угловых положений не изменяется, т.е. существенно упрощается процесс испытания датчиков угловых перемещений с использованием только одного устройства. Этим определяется экономический эффект, величина которого зависит от стоимости применяемого оборудования и технологического процесса измерений. Так, например, при использовании широко применяемой призмы с 32 гранями и дополнительной призмы с 31 гранью количество точек задания углового положения изменятся с 32 (возможных ранее) до 992. Изготовление призмы с количеством граней- 992 практически невозможно, что
подтверждает наличие в указанном изобретении положительного эффекта. Формула изобретения Оптический задатчик углового положения, содержащий корпус, установленный в нем поворотный столик с приводом вращения, закрепленную на столике многогранную отражательную призму и закрепленный в корпусе автоколлиматор, оптически связанный с призмой, отличающийся тем, что, с целью повышения разрешающей способности, он снабжен закрепленными на столике приводным механизмом и валом, установленным соосно с призмой, дополнительной многогранной отражательной призмой, установленной на валу с возможностью вращения и кинематически связанной с приводным механизмом, и закрепленным в корпусе дополнительным автоколлиматором,
оптически связанным с дополнительной призмой, количество граней у которой не кратно количеству граней у основной призмы.
| Кипятильник для воды | 1921 |
|
SU5A1 |
| НПО, ЛОМО.Л., 1987 | |||
| Эйд и нов В.Я | |||
| Измерение углов в машиностроении | |||
| М., 1963, с | |||
| Одновальный, снабженный дробителем, торфяной пресс | 1919 |
|
SU261A1 |
