Изобретение относится к приборостроению, в частности к часовой промышленности, более конкретно к способам определения характеристик осциллятора типа баланс-спираль.
Известны способы определения коэффициентов трения, заключаются в следующем: из материалов, предназначенных к испытаниям, изготавливают так называемые узлы трения. Эти узлы трения устанавливают на машины трения. С помощью устройств, входящих в состав этих машин, создают необходимые усилия прижатия испытуемых материалов. Измеряют силу трения, а также, при необходимости, измеряют путь трения. Затем, используя экспериментальные данные, определяют коэффициент трения по формуле
А N
где Ftp - сила трения;
N - нормальная сила давления.
Наиболее близким является способ определения коэффициента трения с использованием лабораторной машины трения для
определения фрикционных свойств материала, который используется в часовой про- мышленности и заключается в следующем
Изготавливают узел трения из испытуемых материалов и устанавливают его на ма- шину, создают необходимое усилие прижатия между материалами узла трения В процессе определения коэффициента трения измеряют силу трения, а затем рассчитывают коэффициент трения- / по вышеприведенной формуле. Лабораторная машина трения в рассмотренном способе содержит индентор с полусферической пятой, который прижимается с усилием N к плоской поверхности диска из испытуемого материала, вращающегося с постоянной скоростью. Сила трения FTp измеряется с помощью измерительного узла1 тензомет- рическая балка, усилитель, самописец Пройденный чуть трения фиксируется счетчиком оборотов.
Недостатки способа в том. что он не учитывает конструкции, кинематики и динамики опор осциллятора типа баланс-спираль.
СО
С
XI
4ь со
4 N)
Опоры осциллятора характеризуются большими удельными давлениями, имеют специальную конструкцию. Угловая скорость оси баланса при его движении от одного крайнего положения до другого изменяется от нуля до максимума в положении равновесия и снова достигает нуля в крайнем положении. Величина и скорость нарастания сдвигающей силы обусловливаются жесткостью спирали осциллятора.
Однако этим способом можно получить лишь ориентировочное значение коэффициента трения для опор осциллятора типа баланс-спираль.
Целью изобретения является повышение точности определения коэффициента трения.
Указанная цель достигается тем. что в известном способе определения коэффициента трения в опорах осциллятора типа баланс-спираль, заключающемся в измерении параметров, характеризующих коэффициент трения, в узле трения с помощью измерительного узла, в качестве узла трения используют часовые опоры в составе электронно-механического спускового регулятора с магнитоэлектрическим приводом, в качестве измерительного узла - электронно-лучевой осциллограф и омметр, а коэффициент трения /г определяется по формуле
( О Тг . . Ј 2 Тв . | ,2 . „
- (2 u; UB) .
ДФСгР- рЦ.)
где Ф - амплитуда колебаний осциллятора, рад;
Р - вес осциллятора, Н;
EI - модуль упругости материала цапф оси баланса, Н/м2;
Е2 - модуль упругости материала опор цапф оси баланса, Н/м2;
г- радиус цилиндрической части цапфы оси баланса, м;
гс - радиус сферы цапфы оси баланса, м;
гв -длительность импульса привода при вертикальном положении оси баланса, с:
гг - длительность импульсов привода при горизонтальном положении оси баланса, с;
Vr - амплитуда импульсов привода при горизонтальном положении оси баланса. В;
VB - амплитуда импульсов привода при вертикальном положении оси баланса. В;
Rnp - сопротивление обмотки привода, Ом;
г - коэффициент полезного действия схемы привода; 3,14
Предложенный способ в полной мере учитывает особенности конструкции, кинематики, динамики опор осциллятора типа баланс-спираль, что позволят повысить точность определения коэффициента трения в опорах осциллятора..
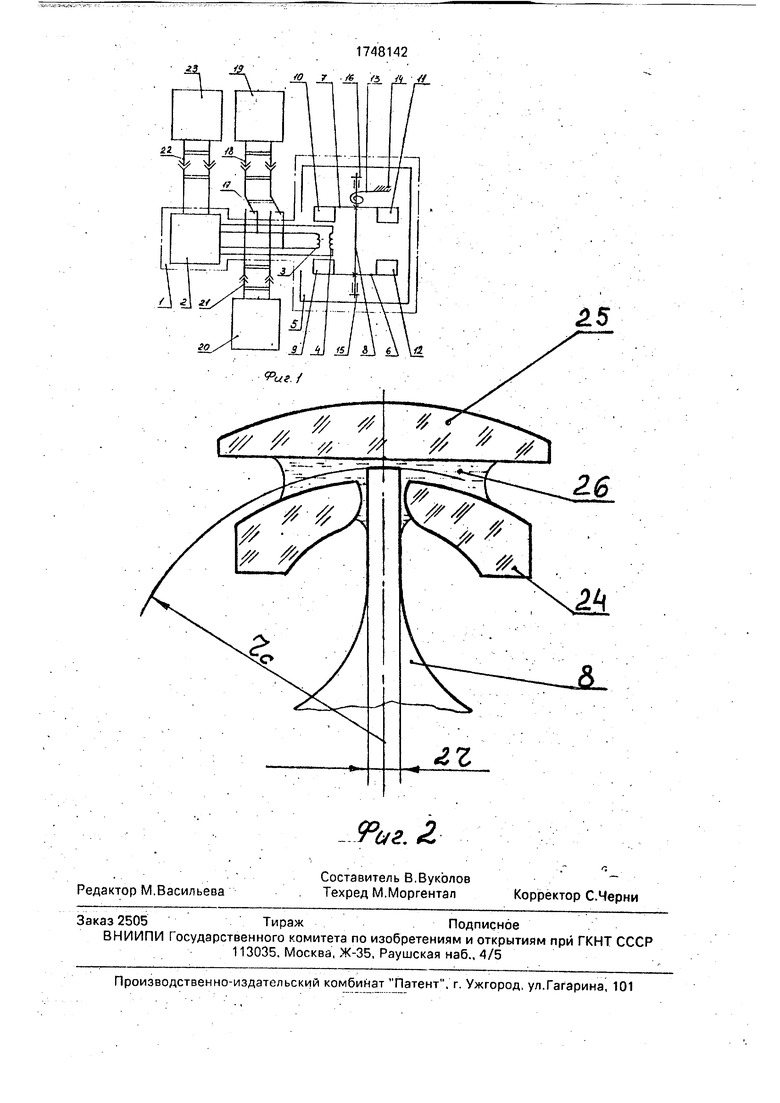
На чертеже фиг.1 изображена комбинированная функциональная схема устройства для определения коэффициента трения в
0 опорах осциллятора типа баланс-спираль, на фиг.2 -сечение опоры осциллятора вдоль оси 8.
Устройство содержит электронно-механический спусковой регулятор 1 с магнито5 электрическим приводом, в который входят схема привода 2 с бифилярно намотанными обмоткой освобождения 3 и обмоткой привода 4, а также осциллятор 5 типа баланс- спираль, в котором баланс выполнен в виде
0 двух дисков 6, 7 из магнитомягкого материала, закрепленных на оси 8. На дисках баланса закреплены постоянные магниты 9, 10, обращенные друг к другу разноименными полюсами, и противовесы 11, 12. Один
5 конец спирали 13 укреплен на основании 14 осциллятора 5, а другой - на оси 8. установленной в опорах 15,16. Обмотка освобождения 3 и обмотка привода 4 через переключатель 17 и контактное разъемное
0 соединение 18 соединены с электронно-лучевым осциллографом 19, а к обмотке привода 4 подключен омметр 20 через контактное разъемное соединение 21. Схема привода 2 через контактное разъемное
5 соединение 22 подключена к источнику питания пострянного тока 23. Опора осциллятора, изображенная на фиг.2, имеет сквозной 24 и накладной 25 часовые камни. В зазоре между камнями 24 и 25 расположе0 но часовое масло 26.
Изобретение осуществляется следующим образом. Измеряют радиус г цилиндрической части цапфы оси 8 баланса, вес Р осциллятора (вес узла баланса), радиус гс
5 сферы цапфы. Соединяют схему привода 2 с источником питания постоянного тока 23 через контактное разъемное соединение 22, а обмотку освобождения 3-е электроннолучевым осциллографом 19 через контакт0 ное соединение 18 и переключатель 17. Омметр 20 соединяют с устройством через контактное разъемнеое средине.ние 21. Располагают устройство таким образом, чтобы ось 8 осциллятора 5 находилась в вертикаль5 ном положении. На схему привода 2 подают напряжение питания 1,5 В от источника 23, в результате чего возникают возникают автоколебательные движения осциллятора 5, при этом поле постоянных магнитов 9, 10 пересекает обмотку освобождения 3 и обку привода 4. наводя в них ЭДС, величина которой пропорционально амплитуде колебаний осциллятора.Устанавливают необходимую амплитуду колебаний осциллятора 5, изменяя напряжение питания схемы привода 2. Соединяют переключателем 17 обмот- ку привода 4 с электронно-лучевым осциллографом 19, при этом на экране ос- циллографа появляется изображение импульсов привода осциллятора. Измеряют амплитуду и длительность импульсов при вода.
Располагают устройство таким образом, чтобы ось 8 осциллятора 5 находилась в горизонтальном положении (потери на трение при этом положении оси осциллятора возрастают). Увеличивают напряжение питания на схеме привода 2 и устанавливают ту же амплитуду колебаний осциллятора 5, что и при вертикальном положении оси 8. Осциллографом 19 измеряют амплитуду и длительность импульсов привода, оммет- pdw 20 измеряют сопротивление обмотки привода 4.
Модули упругости Ei, Е2, коэффициент полезного действия /, входящие в расчетную формулу, определяются соответствен- но материалом цапф оси баланса,- материалом опор-и конструкций устройства.
Экспериментальные данные и конструктивные параметры устройства вводят в расчетную формулу и вычисляют значение коэффициента трения в опопрах осциллятора типа баланс-спираль.
Предложенный способ определения коэффициента трения в опорах осциллятора типа баланс-спираль по сравнению с прототипом учитывает в полной мере особенности конструкции, кинематики, динамики опор осциллятора, что позволяет повысить. точность определения коэффициента тре- ния в опорах осциллятора.
Формула изобретения Способ определения коэффициента трения в опорах осциллятора типа баланс- спираль, заключающийся в измерении параметров, характеризующих коэффициент трения, в узле трения с помощью измерительного узла, отличающийся тем, что, с целью повышения точности определения коэффициента трения, в качестве узла трения используют часовые опоры в составе электронно-механического спускового регулятора с магнитоэлектрическим приводом, в качестве измерительного узла - электронно-лучевой осциллограф и омметр, а коэффициент трения// опреде ляется по формуле:
()4
4 4Ф(гР- Р5Ч|682.Гс(1 +1 )
Е1 Е2
где Ф - амплитуда колебаний осциллятора рад;
Р - вес осциллятора, Н;
EI - модуль упругости материала цапф оси баланса, Н/м2;
Е2 - модуль упругости материала опор цапф оси баланса, Н/м2;
г- радиус цилиндрической части цапфы оси баланса, м;
гс - радиус сферы цапфы оси баланса, м; тв - длительность импульса привода при вертикальном положении оси баланса, с;
ту- длительность импульса привода при горизонтальном положении оси баланса, с;
Vr - амплитуда импульсов привода при горизонтальном положении оси баланса, В,
VB - амплитуда импульсов привода при вертикальном положении оси баланса, В;
Rnp - сопротивление обмотки привода, Ом;
1 - коэффициент полезного действия схемы привода.
1748142 ю JL. &. Л.
га 
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик давления | 1990 |
|
SU1778565A1 |
| Устройство для стабилизации амплитуды колебаний осциллятора | 1987 |
|
SU1509823A1 |
| ЧАСОВОЙ МЕХАНИЗМ | 1971 |
|
SU320803A1 |
| Электромеханический балансовый спусковой регулятор | 1991 |
|
SU1793425A1 |
| СПУСКОВОЙ МЕХАНИЗМ ЧАСОВ | 2021 |
|
RU2765767C1 |
| ТРОМЕХАНИЧЕСКИЙ СПУСКОВОЙ РЕГУЛЯТОР | 1970 |
|
SU272143A1 |
| ПЛАТФОРМА СПУСКА ДЛЯ ЧАСОВ | 2012 |
|
RU2589637C2 |
| СПОСОБ ПРОГНОЗИРОВАНИЯ ПЕРЕМЕННОЙ СОСТАВЛЯЮЩЕЙ ВЫХОДНОГО СИГНАЛА ЭЛЕКТРОМЕХАНИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ (ДУС) НА ЭТАПЕ ИЗГОТОВЛЕНИЯ ЕГО ГИРОМОТОРА ПО ХАРАКТЕРИСТИКАМ УГЛОВЫХ ВИБРАЦИЙ, ВОЗБУЖДАЕМЫХ ГИРОМОТОРОМ, И УСТАНОВКА ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2009 |
|
RU2427801C2 |
| Электронно-механический спусковой регулятор для часов | 1973 |
|
SU553584A1 |
| Способ стабилизации амплитуды колебаний балансового осциллятора с магнитоэлектрическим приводом | 1982 |
|
SU1138784A1 |
Использование1 часовая промышленность, контроль параметров часовых узлов, Сущность изобретения: коэффициент трения в опорах осциллятора типа баланс-спираль вычисляют, используя параметры измеренные на узле трения В качестве узла трения используют часовые опоры в составе электронно-механического спускового регулятора с магнитоэлектрическим приводом 2 ил.
| Аксельрод З.М | |||
| Теория и проектирование приборов времени | |||
| Л.: Машиностроение, 1969, с.55 | |||
| Сборник трудов НИИЧаспрома, вып.9, М.: 1972, с.144. |
