СП
о
3150
Изобретение относится к приборостроению, в частности к часовой промьшшенности, а именно к устройствам стабилизации амплитуды коле- баний осциллятора типа баланс-спираль.
Целью изобретения является повы- шение точности хода часовых механизмов с осциллятором типа баланс- спираль.
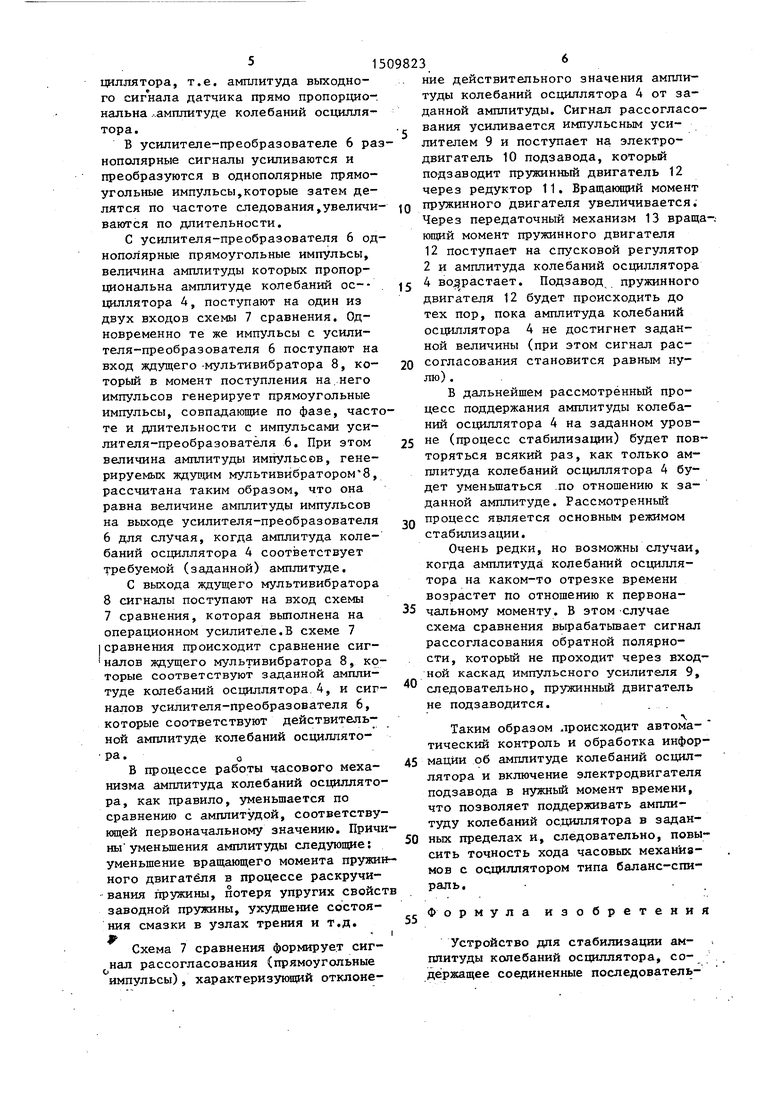
На фиг.1 изображена функциональная схема устройства для стабилизации амплитуды колебаний осциллятора типа баланс-спираль; на - комбинированная схема спускового регулятора с индукционным датчиком амплитуды колебаний осциллятора.
Устройство для стабилизации ам- плитуды колебаний осциллятора типа баланс-спираль содержит регулятор 1 и спусковой регулятор 2 (фиг.1), состоящий из хода 3 и осциллятора 4 типа баланс-спираль.
Регулятор 1 вьшолнен следующим образом. На входе регулятора 1 установлен индукционный датчик 5 амгош- тудЫ колебаний осциллятора 4. Выход датчика 5 соединен с входом усилителя-преобразователя 6. Выход усилителя-преобразователя 6 „соединен с одним из входов схемы 7 сравнения и с входом ждущего мультивибратора 8 Выход ждущего мультивибратора 8 со- единен с вторым входом схемы 7 сравнения. Выход схемы 7 с равнения соеди нен с входом импульсного усилителя 9, выход которого соединен с элек- тродвигателем 10 подзавода, предста ЛЯЮ1ЩМ собой, например, шаговый электродвигатель индукторного типа. Электродвигатель 10 соединен с входом редуктора 11,выполненного, на- пример, по типу зубчатого редуктора Выход редуктора 11 соединен с входом пружинного двигателя 12, выход которого через передаточный механиз 13 соединен с.входом спускового регулятора 2.
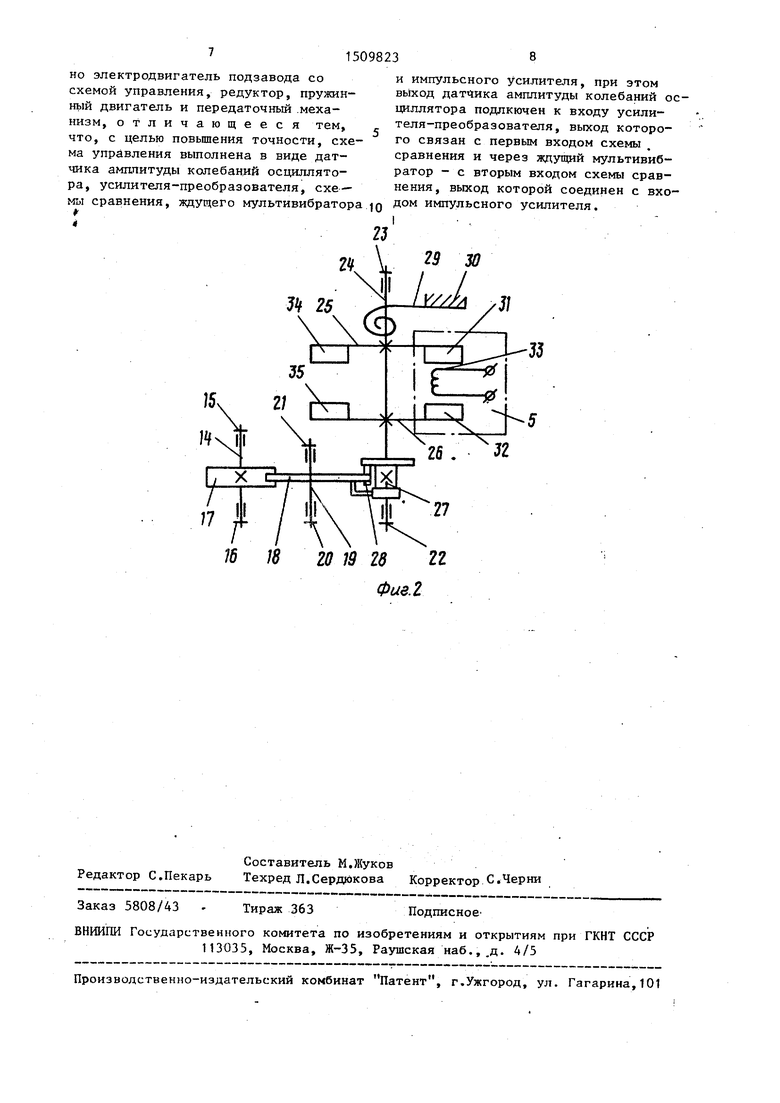
Спусковой регулятор 2 и датчик 5 амплитуды колебаний осциллятора выполнены по схеме, представленной на.фиг.2. Спусковой регулятор представляет собой совокупность хода и осциллятора (колебательной системы) .
с
tO
15
20 25
35 . 40 45 .
50
55
В свою очередь ход имеет следующее устройство. На оси 14, установленной в опорах 15 и 16, закреплено анкерное (ходовое) колесо 17, которое соединено с анкерной вилкой ,18, закрепленной на оси 19, установленной в опорах 20 и 21.
Осциллятор устроен следующим об разом. В опорах 22 и 23 установлена ось 24, на которой закреплены баланс, выполненный в виде двух дисков 25 и 26 из магнитомягкого материала, двойной ролик 27 с импульсным камнем 28, спиральная пружина (спираль) 29, другой, конец которой закреплен на основании 30 часового механизма.
Индукционный датчик 5 амплитуды колебаний осциллятора содержит два постоянных магнита 31 и 32, закрепленных соответственно на дисках 25 и 26 баланса и обращенных друг к другу разноименными полюсами, и ку 33 из медного изолированного .провода, помещенную в зазоре постоян- нах магнитов, причем геометрическая )ось катушки расположена параллельно оси 24 осциллятора и проходит через траектории движения геометри- . ческих центров постоянных магнитов 31 и 32.
Для уравновешивания постоянных магнитов 31 и 32 на дисках 25 и 26 баланса установлены противовесы
34 и 35. .
I .
Устройство работает следующим об- разом.
При колебаниях осциллятора магнитное поле постоянных магнитов 31 и 32 пересекает витки катушки 33, наводя в них индукционную ЭДС. Допустим, что при пересечении маг- щтным полем постоянных магнитов левой части катушки 33 в ней наводится индукционная ЭДС положительной полярности. При дальнейшем движении баланса в том же направлении магнитное поле постоянных магнитов бу дет пересекать правую сторону катушки 33, вследствие чего в ней будет наводиться индукционная ЭДС отрицательной полярности. Таким образом, выходной сигнал датчика 5 будет раз- нополярным, а по форме - близким к синусоиде. Этот сигнал содержит информацию об амплитуде колебаний ос-
циллятора, т.е. амплитуда выходного сиг нала датчика прямо пропорциональна .-.амплитуде колебаний осциллятора.
В усилителе-преобразователе 6 ра нополярные сигналы усиливаются и преобразуются в однополярные прямоугольные импульсы,которые затем делятся по частоте следования,увеличиваются по длительности.
С усилителя-преобразователя 6 од нополярные прямоугольные импульсы, величина амплитуды которых пропорциональна амплитуде колебаний ос-- циллятора 4, поступают на один из двух входов схемы 7 сравнения. Одновременно те же импульсы с усилителя-преобразователя 6 поступают на вход ждущего-мультивибратора 8, ко- торьй в момент поступления на.него импульсов генерирует прямоугольные импульсы, совпадающие по фазе, частте и длительности с импульсами усилителя-преобразователя 6. При этом величина амплитуды импульсов, генерируемых ждусдим мультивибратором 8, рассчитана таким образом, что она равна величине амплитуды импульсов на выходе усилителя-преобразователя
6для случая, когда амплитуда колебаний осциллятора 4 соответствует требуемой (заданной) амплитуде.
С выхода ждущего мультивибратора 8 сигналы поступают на вход схемы
7сравнения, которая выполнена на операционном усилителе.В схеме 7
I сравнения происходит сравнение сиг- налов ждущего мультивибратора 8, которые соответствуют заданной амплитуде колебаний осциллятора. 4, и сигналов усилителя-преобразователя 6, которые соответствуют действительной амплитуде колебаний осциллятора.о
В процессе работы часового механизма амплитуда колебаний осциллятора, как правило, уменьшается по сравнению с амплитудой, соответству- ннцей первоначальному значению. Причины уменьшения амплитуды следующие: уменьшение вращающего момента пружинного двигателя в процессе раскручивания пружины, потеря упругих свойс заводной пружины, ухудшение состояния смазки в узлах трения и т.д.
ff
Схема 7 сравнения формирует сигнал рассогласования (прямоугольные импульсы), характеризуниций отклоне5
ние действительного значения амплитуды колебаний осциллятора 4 от заданной амплитуды. Сигнал рассогласования усиливается импульсным усилителем 9 и поступает на электродвигатель 10 подзавода, которьй подзаводит пружинный двигатель 12 через редуктор 11. Вращакяций момент
0 пружинного двигателя увеличивается. Через передаточный механизм 13 враща-. ющий момент пружинного двигателя 12 поступает на спусковой регулятор 2 и амплитуда колебаний осциллятора 4 во растает. Подзавод пружинного двигателя 12 будет происходить до тех пор, пока амплитуда колебаний осциллятора 4 не достигнет заданной величины (при этом сигнал рас0 согласования становится равным нулю) .
В дальнейшем рассмотренный процесс поддержания амплитуды колебаний осциллятора 4 на заданном уров5 не (процесс стабилизации) будет повторяться всякий раз, как только амплитуда колебаний осциллятора 4 будет уменьшаться .по отношению к заданной амплитуде. Рассмотренньй процесс является основным режимом стабилизации.
Очень редки, но возможны случаи, когда амплитуда колебаний осциллятора на каком-то отрезке времени возрастет по отношению к первона5 чальному моменту. В этом-случае схема сравнения вырабатьюает сигнал рассогласования обратной полярности, который не проходит через входной каскад импульсного усилителя 9, следовательно, пружинный двигатель не подзаводится.
Таким образом происходит автоматический контроль и обработка инфор5 мацйи об амплитуде колебаний осциллятора и включение электродвигателя подзавода в нужный момент времени, что позволяет поддерживать амплитуду колебаний осциллятора в задан0 ных пределах и, следовательно, повысить точность хода часовых механизмов с осциллятором типа баланс-спираль.
0
0
55
Формула изобретени
Устройство для стабилизации амплитуды колебаний осциллятора, содержащее соединенные последовательно электродвигатель подзавода со схемой управления, редуктор, пружиной двигатель и передаточный .механизм, отличающееся тем, что, с целью повышения точности, схема управления выполнена в виде датчика амппитуды колебаний осциллятора, усилителя-преобразователя, схе- &I сравнения, зкдущего мультивибратора
5« 25
Л
1Ь W го 19 гв
и импульсного усилителя, при этом выход датчика амплитуды колебаний осциллятора подлкючен к входу усилителя-преобразователя, выход которого связан с первым входом схемы . сравнения и через ждущий мультивибратор - с вторым входом схемы сравнения, выход которой соединен с входом импульсного усилителя.
;
ха Л.2
Изобретение относится к приборостроению , в частности, к часовой промышленности, а именно к устройствам стабилизации амплитуды колебаний осциллятора типа баланс - спираль. Цель изобретения - повышение точности хода часовых механизмов путем стабилизации амплитуды колебаний осциллятора. Устройство для стабилизации амплитуды колебаний осциллятора содержит электродвигатель 10 подзавода 20 схемой управления, редуктор 11, пружинный двигатель 12 и передаточный механизм. Новым в устройстве является схема управления электродвигателем подзавода, благодаря которой устройство получает информацию о действительной величине амплитуды колебаний осциллятора, сравнивает ее с заданной амплитудой и формирует сигнал рассогласования, воздействующий на электродвигатель 10 подзавода, в результате чего амплитуда колебаний осциллятора поддерживается на заданном уровне. 2 ил.
Фиг.г
| Парамонов Д.А | |||
| Регулировка балансовых часов | |||
| М., 1977, с.6 | |||
| Аксельрод З.М | |||
| Теория и проектирование приборов времени | |||
| Л., 1969, с.160-161. |
