Изобретение относится к измерительной технике, а именно к способам и средствам измерения частот и уровней вибраций гиромоторов.
В поплавковых электромеханических гироскопических приборах, предназначенных для работы в инерциальных навигационных системах и являющихся измерителями угловых скоростей, применяются, как правило, синхронные гистерезисные двигатели, ротор которых подвешен на шарикоподшипниках. Известно [2], что работающий гиромотрр возбуждает вибрационные колебания гироузла, в котором он установлен. Вибрационные колебания гироузла, возбуждаемые работающим гиромотором, представляют собой пространственные колебания по трем угловым и трем осевым координатам; при этом угловые колебания приводят к возникновению переменной составляющей выходного сигнала поплавкового электромеханического датчика угловой скорости в полосе его пропускания и к высокочастотной шумовой составляющей. Работающий гиромотор возбуждает вибрационные угловые колебания вокруг двух экваториальных осей и вокруг оси вращения ротора. В каждой экваториальной плоскости угловые вибрации возбуждаются:
- вследствие остаточной статической и динамической несбалансированности ротора гиромотора; эти вибрационные колебания имеют частоту, равную круговой частоте вращающегося ротора  где n - угловая скорость вращения ротора (об/мин); частота угловых вибраций
где n - угловая скорость вращения ротора (об/мин); частота угловых вибраций  ;
;
- вследствие неуравновешенности сепаратора шарикоподшипников - опор ротора, в том числе вследствие разного размера шариков; эти угловые вибрации имеют частоту f2=0,5·f1;
- вследствие дефектов внутренних и наружных колец шарикоподшипников - опор ротора; обе эти частоты высокие и зависят как от угловой скорости вращения ротора, так и от числа шариков.
У синхронных гистерезисных двигателей существуют колебания поля ротора относительно поля статора, что приводит к угловым низкочастотным вибрационным колебаниям порядка 4-7 Гц вокруг оси ротора (по третьей угловой координате); эти вибрационные колебания накладываются на вращательное движение ротора синхронного гистерезисного двигателя.
Известны способы измерения вибраций, возбуждаемых работающим гиромотором, с помощью пьезоэлектрического датчика. При этом измеряются линейные вибрации, возбуждаемые по осевой координате, совпадающей с осью чувствительности пьезодатчика, как правило, - однокоординатного измерителя.
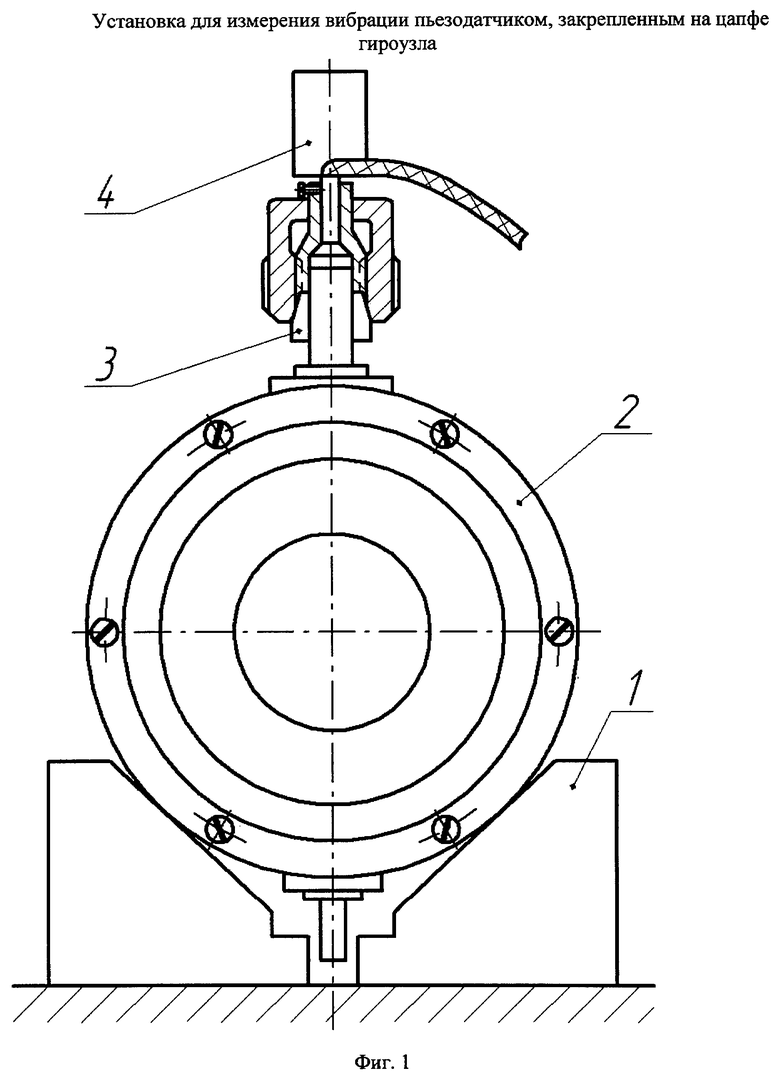
I. Известен способ измерения вибрации пьезоэлектрическим датчиком, закрепленным на цапфе гироузла. Для измерения вибрации гироузла по данному способу применяется установка, изображенная на фиг.1 и описанная в п.II в качестве аналога. Гироузел 2 устанавливают на резиновую подставку 1 при вертикальном или горизонтальном положении оси ротора. На верхней цапфе цанговой переходной муфтой 3 закрепляется пьезодатчик 4. Блок-схема измерения относительного уровня вибрации гироузла представлена на фиг.2 и описана в п.II. Относительный уровень вибрации измеряется следующим образом:
1) определяют относительный уровень вибрации в режиме разгона по вольтметру 6 с одновременной записью сигнала на осциллографе 10. По окончании измерений осциллограф выключают;
2) определяют момент установившегося режима вращения ротора, включают осциллограф и измеряют относительный уровень вибрации по вольтметру с одновременной записью сигнала на осциллографе. По окончании измерения осциллограф выключают;
3) выключают питание гиромотора, снимают пьезодатчик с цапфы. После полной остановки ротора гироузел устанавливают в специальную тару;
4) производят анализ осциллограммы, сравнивают пиковое значение с допустимым значением, установленным по эталонному гироузлу, причем при наборе оборотов выделяют несколько пиковых значений, соответствующих различным частотам. Они могут превышать допустимый уровень на рабочих оборотах в несколько раз, но не должны быть выше, чем у эталонного гироузла.
Известен способ измерения вибрации гиромоторов или гироприборов при помощи двух индукционных или двух пьезоэлектрических датчиков. Для измерения вибрации гироузла по данному способу применяется установка, изображенная на фиг.3 и описанная в п.II. При помощи известной установки измеряют отдельные составляющие вибрации: радиальной и осеваой. Блок-схема измерения аналогична предыдущей и изображена на фиг.2. Амплитуду, пропорциональную скорости вибрации, определяют по пиковому значению на экране осциллографа или по вольтметру. Допустимую величину отклонения луча на экране осциллографа устанавливают экспериментально по эталонному гироприбору. За единицу измерения принимают 1 мм шкалы осциллографа или 1 мВ по вольтметру.
Относительный уровень вибрации измеряют следующим образом:
1) гироприбор закрепляют на установке при вертикальном положении оси ротора;
2) включают питание гиромотора;
3. перестановкой переключателя и разворотом оси ротора измеряют вибрацию по схеме, представленной на фиг.2;
4) после измерения вибрации выключают рабочее питание, гироприбор снимают с приспособления и устанавливают в тару.
Если высота вертикальной развертки луча на шкале осциллографа при одном из измерений превышает установленный допуск, то гиромотор либо дополнительно уравновешивают, либо перебирают, меняют подшипники и производят дополнительное уравновешивание.
В качестве прототипа принят наиболее близкий к заявляемому и первый известный способ измерения угловых вибраций, возбуждаемых гиромотором, описанный в [3] и заключающийся в том, что контролируемый гиромотор механически соединяют с измерителем угловых вибраций; устанавливают гиромотор, соединенный с указанным измерителем, в подвес, обеспечивающий возможность возникновения угловых колебаний упомянутого соединения вокруг оси подвеса эталонного датчика угловой скорости (ДУС); включают гиромотор путем подачи питания от генератора синусоидального напряжения через магазин емкостей, обеспечивающий возможность питания трехфазных гиромоторов от однофазного источника с фазосдвигающей емкостью; осуществляют измерение выходного сигнала U(t) измерителя угловых вибраций в функции времени с помощью средства измерения, сопряженного с ПЭВМ, и программным способом по результатам разложения в ряд Фурье функции U(t) определяют характеристики вибраций гиромотора на отдельных частотах.
Установка, реализующая описанный способ, показана на фиг.4. В качестве измерителя угловых колебаний, возбуждаемых гиромотором вокруг его экваториальных осей, используется поплавковый электромеханический датчик угловой скорости (ДУС), который имеет ту же самую конструкцию, что и ДУС, собираемый с контролируемым гиромотором. Этот ДУС используют в качестве эталонного. Контроль вибраций осуществляют после установки проверяемого гиромотора в поплавковый гироузел (ГУ), для чего контролируемый гироузел соединяют с эталонным ДУС механически, с помощью пасика, и полученную таким образом систему размещают на поролоновой прокладке, которая играет роль упругого подвеса, позволяющего эталонному ДУС воспринимать и измерять угловые колебания, возбуждаемые при работе гиромотора контролируемого гироузла. Соединение контролируемого ГУ и эталонного ДУС осуществляют таким образом, чтобы оси вращения роторов их гиромоторов были параллельны друг другу и оси подвеса контролируемого ГУ и эталонного ДУС также были параллельны друг другу. В эталонном ДУС замыкают обратную связь от датчика угла через усилитель на датчик момента, соединяют нагрузочный резистор с измерительным прибором, в качестве которого могут применяться осциллограф, вольтметр и анализатор спектра, а также соединяют нагрузочный резистор через аналого-цифровой преобразователь с ПЭВМ. Включают гиромотор контролируемого гироузла, подавая на него питание от генератора синусоидального напряжения через магазин емкостей, необходимый для обеспечения возможности питания трехфазных гиромоторов от однофазного источника с фазосдвигающей емкостью, гиромотор эталонного ДУС оставляют невключенным, а измерение напряжения на нагрузочном резисторе в функции времени осуществляют для эталонного ДУС измерительным прибором и по результатам разложения функции напряжения в ряд Фурье делают заключение об амплитудах переменной составляющей на отдельных частотах, которые будут содержаться в выходном сигнале ДУС, собираемого с использованием контролируемого гироузла. Эталонный ДУС работает как измеритель угловых ускорений. В этом способе эталонный ДУС измеряет угловые вибрации, которые возбуждает гиромотор контролируемого ГУ вокруг той его экваториальной оси, которая параллельна оси чувствительности эталонного ДУС.
Описанный способ-прототип имеет следующие преимущества в сравнении с аналогами.
1. В аналогах пьезоэлектрические датчики контролируют линейные вибрации, возбуждаемые гиромотором в направлении оси чувствительности пьезоэлектрического датчика. В прототипе осуществляется измерение угловых вибраций вокруг одной из экваториальных осей контролируемого гиромотора, что особенно важно, т.к. именно угловые вибрации приводят к возникновению завышенных значений переменной составляющей выходного сигнала ДУС после его сборки с этим гиромотором, причем частотный состав угловых вибраций содержит низкочастотные составляющие, особенно опасные для систем управления, в которых используется ДУС.
2. Способ позволяет прогнозировать значение переменной составляющей выходного сигнала поплавкового датчика угловой скорости (ДУС) до его окончательной сборки путем измерения вибраций, генерируемых гиромотором гироузла собираемого ДУС. Вибрации контролируемого гироузла передаются на корпус эталонного ДУС, имеющего ту же конструкцию, что и собираемый датчик угловой скорости, а следовательно, - и идентичные динамические характеристики, поэтому вибрации контролируемого гироузла вызывают аналогичные колебания поплавкового гироузла эталонного ДУС, который при невключенном гиромоторе работает как акселерометр угловых ускорений. Зависимость напряжения U(t) на нагрузочном резисторе эталонного ДУС аналогична той зависимости, которая будет получена в собираемом ДУС после его окончательной сборки. Это позволяет на ранней стадии сборки выявить гироузлы (гиромоторы), которые имеют повышенный уровень вибраций, что экономит время и средства, так как исключаются дорогостоящие сборочные операции негодных по уровню переменной составляющей датчиков угловой скорости.
3. Позволяет исключить из измерительной цепи пьезодатчик, являющийся достаточно грубым измерительным прибором.
Несмотря на имеющиеся преимущества, указанный способ имеет следующие недостатки.
1. Для того, чтобы вибрации контролируемого гироузла могли быть измерены эталонным ДУС, систему располагают на поролоне. Это обеспечивает возможность колебаний корпуса эталонного ДУС под действием угловых вибраций контролируемого ГУ. Но это закрепление (подвес системы) имеет достаточно неопределенные динамические характеристики и значительный момент упругого сопротивления, что снижает чувствительность системы.
2. В эталонном ДУС гиромотор выключают, чтобы его собственные вибрации не накладывались на вибрации контролируемого гироузла. Но динамические характеристики ДУС с включенным и выключенным гиромотором близки, но не полностью идентичны.
3. Способом возможно контролировать угловые вибрации только вокруг одной экваториальной оси гиромотора, совпадающей с осью подвеса эталонного ДУС, и невозможен контроль угловых вибраций вокруг второй экваториальной оси и оси вращения ротора контролируемого ГУ.
Задачей изобретения является повышение точности определения характеристик угловых вибраций, возбуждаемых гиромотором на отдельных частотах вокруг двух его экваториальных осей и вокруг оси вращения.
Технический результат достигается тем, что в известном способе, в котором контролируемый гиромотор механически соединяют с измерителем угловых вибраций, устанавливают гиромотор, соединенный с указанным измерителем, в подвес, обеспечивающий возможность возникновения угловых колебаний упомянутого соединения вокруг оси подвеса эталонного датчика угловой скорости (ДУС); включают гиромотор путем подачи питания от генератора синусоидального напряжения через магазин емкостей, обеспечивающий возможность питания трехфазных гиромоторов от однофазного источника с фазосдвигающей емкостью; осуществляют измерение выходного сигнала U(t) измерителя угловых вибраций в функции времени с помощью средства измерения, сопряженного с ПЭВМ, и программным способом по результатам разложения в ряд Фурье функции U(t) определяют характеристики вибраций гиромотора на отдельных частотах, используют установку, описанную в п.II, при этом вначале выполняют масштабирование установки с определением масштабных коэффициентов Kf на отдельных фиксированных частотах f, на которых заданы требования к переменной составляющей выходного сигнала ДУС  и на которых при испытаниях всех гиромоторов данного типа будут определяться характеристики возбуждаемых ими угловых вибраций; определяют допустимые значения
и на которых при испытаниях всех гиромоторов данного типа будут определяться характеристики возбуждаемых ими угловых вибраций; определяют допустимые значения  - вибрационных моментов, возбуждаемых по оси прецессии ДУС вследствие угловых вибраций гиромотора на тех же фиксированных частотах f; записывают значения масштабных коэффициентов Kf и допустимые значения
- вибрационных моментов, возбуждаемых по оси прецессии ДУС вследствие угловых вибраций гиромотора на тех же фиксированных частотах f; записывают значения масштабных коэффициентов Kf и допустимые значения  вибрационных моментов в документ, определяющий порядок контроля на установке гиромоторов данного типа; затем каждый контролируемый гиромотор закрепляют на подвесе установки, при этом устанавливают гиромотор последовательно в три положения, в которых вдоль оси подвеса установки ориентируется сначала первая экваториальная ось ротора, затем вторая экваториальная ось, перпендикулярная оси вращения ротора гиромотора, затем полярная ось гиромотора; в каждом положении включают гиромотор, задавая напряжение и частоту питания, соответствующие режиму работы гиромотора в составе ДУС; используя амплитудные значения Uf выходного сигнала измерителя угловых вибраций установки, получаемые по результатам разложения в ряд Фурье функции U(t) - выходного сигнала измерителя угловых вибраций установки, рассчитывают по формуле Mf=Kf·Uf амплитудные значения вибрационного момента, возбуждаемого гиромотором на каждой фиксированной частоте; принимают значения Mf в качестве характеристики угловых вибраций гиромотора и сравнивают полученные значения Mf с допустимым для этой частоты значением вибрационного момента
вибрационных моментов в документ, определяющий порядок контроля на установке гиромоторов данного типа; затем каждый контролируемый гиромотор закрепляют на подвесе установки, при этом устанавливают гиромотор последовательно в три положения, в которых вдоль оси подвеса установки ориентируется сначала первая экваториальная ось ротора, затем вторая экваториальная ось, перпендикулярная оси вращения ротора гиромотора, затем полярная ось гиромотора; в каждом положении включают гиромотор, задавая напряжение и частоту питания, соответствующие режиму работы гиромотора в составе ДУС; используя амплитудные значения Uf выходного сигнала измерителя угловых вибраций установки, получаемые по результатам разложения в ряд Фурье функции U(t) - выходного сигнала измерителя угловых вибраций установки, рассчитывают по формуле Mf=Kf·Uf амплитудные значения вибрационного момента, возбуждаемого гиромотором на каждой фиксированной частоте; принимают значения Mf в качестве характеристики угловых вибраций гиромотора и сравнивают полученные значения Mf с допустимым для этой частоты значением вибрационного момента  . Выполняют масштабирование установки путем определения масштабных коэффициентов Kf на фиксированных частотах f, для чего закрепляют эталонный образец гиромотора на подвесе установки, ориентируя экваториальную ось гиромотора вдоль подвеса установки, предварительно устанавливают на ротор эталонного образца гиромотора микрогрузы массой m на плече h, т.е. искусственно создают динамическую разбалансировку ротора гиромотора, задают от генератора синусоидальных колебаний напряжения питания гиромотора с фиксированными частотами f, на которых необходимо определить характеристики возбуждаемых гиромотором вибраций; рассчитывают величину вибрационного момента, возникающего при работе гиромотора, по формуле Mf=m·(2·π·f)·R·h, где R - радиус ротора, f - частота вращения ротора (Гц), 2·π·f - угловая скорость вращения (1/с); при задании напряжения питания гиромотора с каждой фиксированной частотой f измеряют выходное напряжение Uf измерителя угловой вибрации установки и рассчитывают масштабный коэффициент Kf установки для каждой частоты f по формуле
. Выполняют масштабирование установки путем определения масштабных коэффициентов Kf на фиксированных частотах f, для чего закрепляют эталонный образец гиромотора на подвесе установки, ориентируя экваториальную ось гиромотора вдоль подвеса установки, предварительно устанавливают на ротор эталонного образца гиромотора микрогрузы массой m на плече h, т.е. искусственно создают динамическую разбалансировку ротора гиромотора, задают от генератора синусоидальных колебаний напряжения питания гиромотора с фиксированными частотами f, на которых необходимо определить характеристики возбуждаемых гиромотором вибраций; рассчитывают величину вибрационного момента, возникающего при работе гиромотора, по формуле Mf=m·(2·π·f)·R·h, где R - радиус ротора, f - частота вращения ротора (Гц), 2·π·f - угловая скорость вращения (1/с); при задании напряжения питания гиромотора с каждой фиксированной частотой f измеряют выходное напряжение Uf измерителя угловой вибрации установки и рассчитывают масштабный коэффициент Kf установки для каждой частоты f по формуле  Определяют допустимые значения
Определяют допустимые значения  вибрационных моментов, возбуждаемых гиромотором данного типа на каждой фиксированной частоте f для экваториальных осей ротора по формуле
вибрационных моментов, возбуждаемых гиромотором данного типа на каждой фиксированной частоте f для экваториальных осей ротора по формуле  , где Н - кинетический момент электромеханического ДУС, для которого предназначен гиромотор (г·см·с);
, где Н - кинетический момент электромеханического ДУС, для которого предназначен гиромотор (г·см·с);  - заданное в качестве нормы допустимое значение переменной составляющей выходного сигнала ДУС (1/с); и для полярной оси ротора определяют допустимые значения по формуле
- заданное в качестве нормы допустимое значение переменной составляющей выходного сигнала ДУС (1/с); и для полярной оси ротора определяют допустимые значения по формуле  где γ - максимально возможное значение угла неперпендикулярности оси вращения ротора к оси прецессии ДУС после установки гиромотора в составе гироузла в ДУС.
где γ - максимально возможное значение угла неперпендикулярности оси вращения ротора к оси прецессии ДУС после установки гиромотора в составе гироузла в ДУС.
Предлагаемый способ состоит из следующих операций.
1. Производится масштабирование установки, описанной в п.II. Масштабирование необходимо для определения коэффициента передачи установки, т.е. коэффициента пропорциональности Kf между вибрационным моментом, который возбуждается работающим гиромотором вокруг своей оси (экваториальной, либо полярной), совпадающей при проверке с осью подвеса установки, и напряжением, которое при этом выдает магнитоэлектрический датчик установки. На каждой фиксированной частоте этот коэффициент Kf имеет другое значение.
1.1. На подвес установки (фиг.5, 6) закрепляется эталонный образец испытуемого гиромотора так, что его экваториальная ось параллельна оси установки. На ротор гиромотора устанавливаются микрогрузы массой m на плече h, т.е. искусственно создается динамическая разбалансировка ротора, при этом момент оказывается известной величиной. При вращении ротора к вертикальной оси подвеса установки прикладывается момент, создаваемый центробежными силами, амплитуда которого может быть выражена формулой

Уравнение колебаний подвеса установки имеет вид:

где I, φ - момент инерции подвеса с закрепленным гиромотором и угол колебаний подвеса вокруг вертикальной оси;
c - угловая жесткость растяжек 7 (фиг.5, 6);
m - масса микрогрузов, закрепленных на роторе на плече h;
R - радиус ротора;
f - частота вращения ротора (Гц);
2·π·f - угловая скорость вращения ротора (1/с).
Угловая жесткость растяжек мала, поэтому уравнение (2) может быть записано в виде (3):

или

Для нулевых начальных условий

Напряжение магнитоэлектрического датчика установки пропорционально  , а следовательно, угловой скорости вибрационных колебаний ωf.
, а следовательно, угловой скорости вибрационных колебаний ωf.
1.2. От генератора синусоидальных колебаний 16 (фиг.7) задают напряжения питания гиромотора с фиксированными частотами f, на которых заданы требования к переменной составляющей выходного сигнала ДУС и на которых при испытаниях всех гиромоторов данного типа будут определяться характеристики возбуждаемых ими угловых вибраций. В качестве характеристики угловых вибраций, возбуждаемых гиромотором, принят момент, который возникает по оси прецессии ДУС, после установки в него гиромотора (в составе гироузла). Этот момент Mf представляет собой гироскопический момент по оси прецессии вследствие действия угловой вибрации вокруг экваториальной оси ротора, совпадающей с осью чувствительности ДУС. Удобно в качестве характеристики угловой вибрации выбрать именно указанный момент, а не какую-либо другую характеристику угловой вибрации, т.к. это дает возможность:
- создать известную величину момента (1) путем искусственного введения динамической разбалансировки эталонного гиромотора и использовать эту известную величину момента для масштабирования установки;
- рассчитать нормы для момента  как для гироскопического момента, допустимого для ДУС при угловой вибрации вокруг оси чувствительности, заданной нормой
как для гироскопического момента, допустимого для ДУС при угловой вибрации вокруг оси чувствительности, заданной нормой 
1.3. Измеряют выходное напряжение магнитоэлектрического датчика сигнала установки 8 любым из регистрирующих средств 13 (осциллографом, вольтметром и т.п.) или анализатором спектра 15, показанными на фиг.7, и рассчитывают масштабный коэффициент по формуле
где Uf - выходное напряжение магнитоэлектрического датчика установки на частоте f (мВ);
1.4. До начала проверки гиромоторов по предлагаемому способу производится еще одна операция - определение допустимых значений вибрационных моментов, возбуждаемых гиромотором данного типа на каждой фиксированной частоте. Как было сказано, в качестве характеристики возбуждаемых гиромотором вибраций принят именно этот параметр, в том числе и потому, что можно установить его допустимое значение на основе заданного для ДУС допустимого значения Действительно, если для ДУС задано в виде нормы допустимое значение переменной составляющей  , то допустимое значение соответствующего гироскопического момента, действующего по оси прецессии, будет равно
, то допустимое значение соответствующего гироскопического момента, действующего по оси прецессии, будет равно  . Это значение и есть норма для вибрационного момента, возникающего от угловых вибраций вокруг экваториальной оси гиромотора. Норма вибрационного момента, возникающего вследствие угловых вибраций вокруг полярной оси гиромотора, зависит еще от угла неперпендикулярности (берут возможный максимум) вектора Н к оси прецессии ДУС.
. Это значение и есть норма для вибрационного момента, возникающего от угловых вибраций вокруг экваториальной оси гиромотора. Норма вибрационного момента, возникающего вследствие угловых вибраций вокруг полярной оси гиромотора, зависит еще от угла неперпендикулярности (берут возможный максимум) вектора Н к оси прецессии ДУС. 
2. Сам процесс контроля изготавливаемых гиромоторов состоит в следующем. Испытуемый гиромотор 5 устанавливают на подвижной части установки по п.II в специальном подвесе (фиг.6) последовательно в каждое из трех положений, в которых сначала одна экваториальная ось, затем вторая экваториальная ось, а затем полярная ось ориентируются вдоль оси подвеса установки. От генератора синусоидального напряжения 16 (магазин емкостей 17 предусмотрен для возможности питания трехфазных гиромоторов, от однофазного источника с фазосдвигающей емкостью) задают на гиромотор штатное питание: напряжение и частота соответствуют режиму работы гиромотора в составе ДУС. При этом возбуждаются вибрации, вызывающие угловые колебания гиромотора и подвеса установки.
3. Сигнал с чувствительного элемента установки - магнитоэлектрического датчика 8, измеряющего эти колебания, после усиления и преобразования, например, в 12-разрядном АЦП 12 поступает в ПЭВМ 14, где подвергается обработке с помощью специально разработанного программного обеспечения с формированием функции U(t).
4. В ПЭВМ 14 производится обработка полученной информации разложением в ряд Фурье функции U(t) - напряжения магнитоэлектрического датчика угла, на каждой фиксированной частоте f определяется аналитически напряжения Uf и рассчитывается в ПЭВМ значение Mf=Kf·Uf, которое сравнивается с нормой .
II. Известна установка (фиг.1), содержащая резиновую подставку 1, в которую устанавливается испытуемый гироузел 2 при вертикальном или горизонтальном положении оси ротора, цанговую переходную муфту 3, закрепленную на верхней цапфе и являющуюся соединительным звеном между гироузлом 2 и пьезодатчиком 4, являющимся измерительным устройством для регистрации частот и уровня вибрации гиромотора 2 [1, стр.233-234].
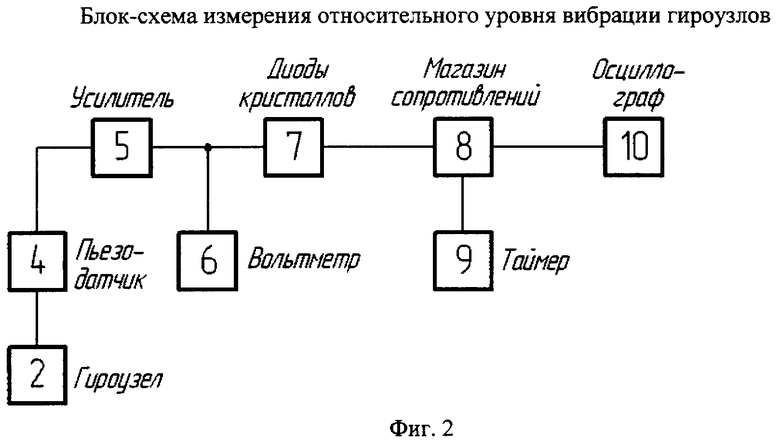
Измерение уровня вибраций осуществлялось по схеме, представленной на фиг.2, где к последовательно соединенным гироузлу 2, пьезодатчику 4, усилителю 5, диодовому мосту 7, магазину сопротивлений 8 и осциллографу 10 в точках соединения между выходом усилителя 5 и входом диодного моста 7 подключен вольтметр 6, а ко второму выходу магазина сопротивлений 8 подключен датчик отметки времени 9.
Описанная установка позволяла определить относительный уровень вибраций в режиме разгона гиромотора по показаниям вольтметра 6 с одновременной записью сигнала на осциллографе 10, определить момент установившегося режима вращения ротора по показаниям тех же приборов.
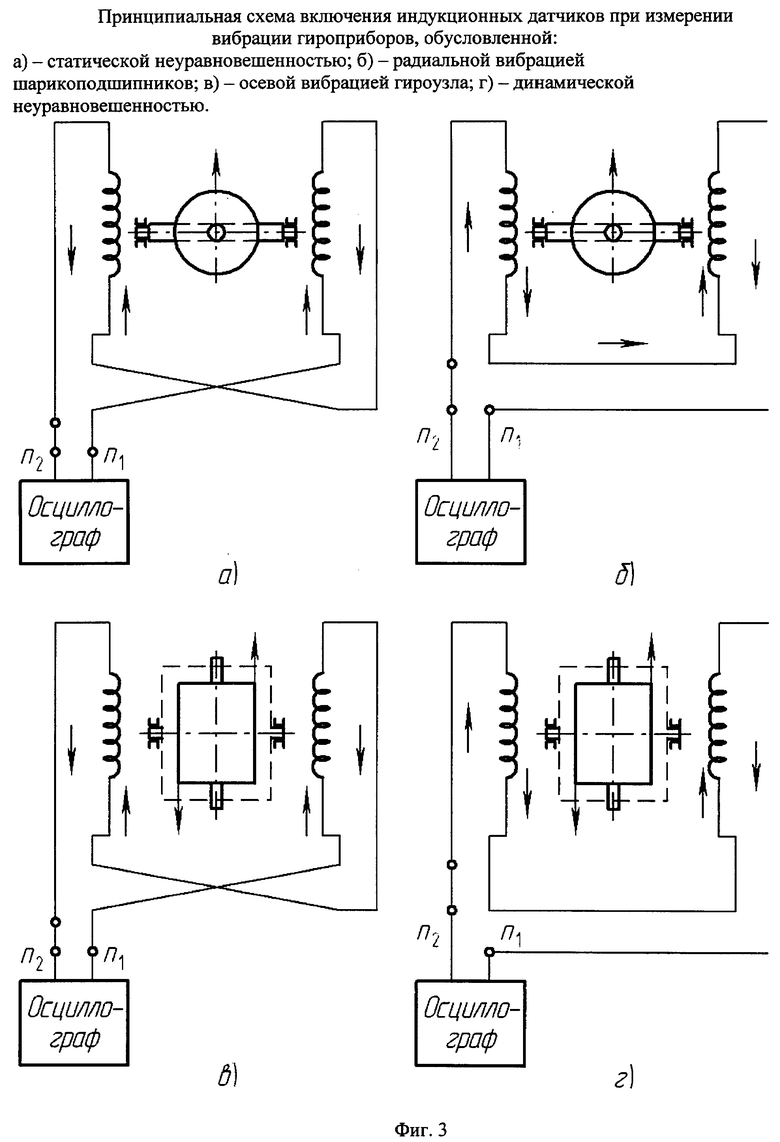
Известна установка (фиг.3), содержащая подвижную платформу 1, на которой крепится гироузел 2 и жестко установлены либо пьезоэлектрические, либо индукционные датчики 4 и 5 в осевом и радиальном направлениях. Гиромотор 2 крепится на платформе специальными прижимами 3. Выходы датчиков (пьезоэлектрических или индукционных) через переключатель 6 подключены к измерительному прибору 7, в качестве которого может быть использован осциллограф или вольтметр. Поочередным включением переключателя 6 при соответствующем развороте гироузла 2 на данной установке измеряются отдельные составляющие вибрации: статическая, динамическая, радиальная и осевая.
Известные установки обладали следующими недостатками.
1. При применении пьезоэлектрических или индукционных датчиков выявляются линейные (поступательные вибрации) на средних - от частоты вращения ротора - и на порядок более высоких частотах (сотни и тысячи Гц), которые много больше полосы пропускания ДУС, а частоты, близкие к верхней границе полосы пропускания ДУС или входящие в нее, остаются вне контроля.
2. При применении данных установок регистрировался лишь факт наличия вибраций, причина же их оставалась невыявленной.
Наиболее близким к заявляемому объекту аналогом, принятым за прототип, по совокупности существенных признаков является установка, изображенная на фиг.4, содержащая измеритель характеристик угловых вибраций, средство механического соединения проверяемого гиромотора с измерителем угловых вибраций и подвес, обеспечивающий возможность возникновения вокруг оси подвеса установки под действием возбуждаемых гиромотором вибраций угловых колебаний проверяемого гиромотора, механически соединенного с подвижной частью измерителя характеристик угловых вибраций; средство измерения выходного сигнала измерителя характеристик угловых вибраций, стыкуемое с ПЭВМ.
Задачей изобретения является повышение точности определения характеристик угловых вибраций, возбуждаемых гиромотором на отдельных частотах вокруг двух его экваториальных осей и вокруг оси вращения, реализуемое в способе по п.I, посредством внедрения предлагаемой установки.
Технический результат достигается тем, что в известной установке, содержащей измеритель характеристик угловых вибраций, средство механического соединения проверяемого гиромотора с измерителем угловых вибраций и подвес, обеспечивающий возможность возникновения вокруг оси подвеса установки под действием возбуждаемых гиромотором вибраций угловых колебаний проверяемого гиромотора, механически соединенного с подвижной частью измерителя характеристик угловых вибраций; средство измерения выходного сигнала измерителя характеристик угловых вибраций, стыкуемое с ПЭВМ, вводятся магнитоэлектрический датчик, содержащий n магнитов и n катушек, при этом магниты установлены на подвесе, а катушки на корпусе установки, механическое соединение проверяемого гиромотора с измерителем угловых вибраций выполнено в виде цанги, к которой в специальном технологическом корпусе, допускающем закрепление гиромотора в трех положениях, крепится проверяемый гиромотор; на цанге закреплен кольцевой каркас с равномерно установленными магнитами магнитоэлектрического датчика; подвес выполнен в виде трех тонких металлических струн, один конец которых прикреплен к цанге, а второй - к корпусу установки; введена центрирующая камневая опора, бушон которой закреплен по оси цанги, а цапфа установлена неподвижно на корпусе установки, при этом подвод питания к проверяемому гиромотору выполнен через три металлические струны подвеса, введено арретирующее устройство для обеспечения сохранности установки в нерабочем состоянии.
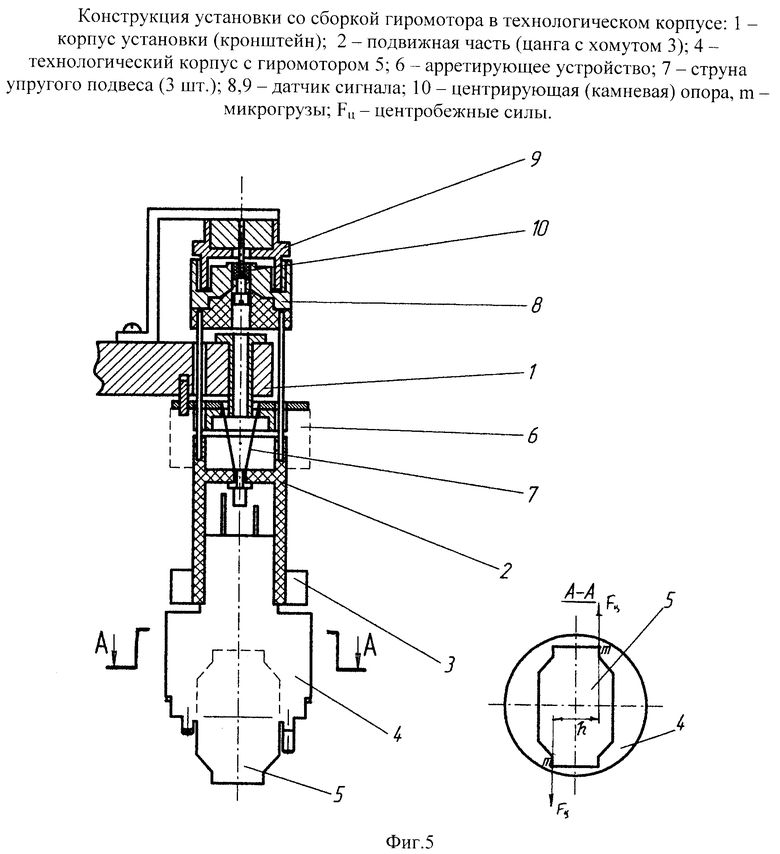
На фиг.5 представлена конструктивная схема установки с испытуемым гиромотором, закрепленным в положении, соответствующем контролю частот угловых вибраций в экваториальной плоскости.
Испытуемый гиромотор 5 (фиг.5) установлен в технологическом корпусе 4, который закреплен в цанге 2 с помощью хомута 3. Цанга 2 является подвижной частью установки, имеет упругий подвес на трех металлических струнах 7 к корпусу установки и жестко связана с магнитной системой 8 магнитоэлектрического датчика, обмотки которого 9 закреплены на корпусе. Центрирующая камневая опора 10 введена для обеспечения равномерности рабочего зазора магнитоэлектрического датчика сигнала. Подвод питания к гиромотору осуществляется через три металлические струны 7 - подвес установки.
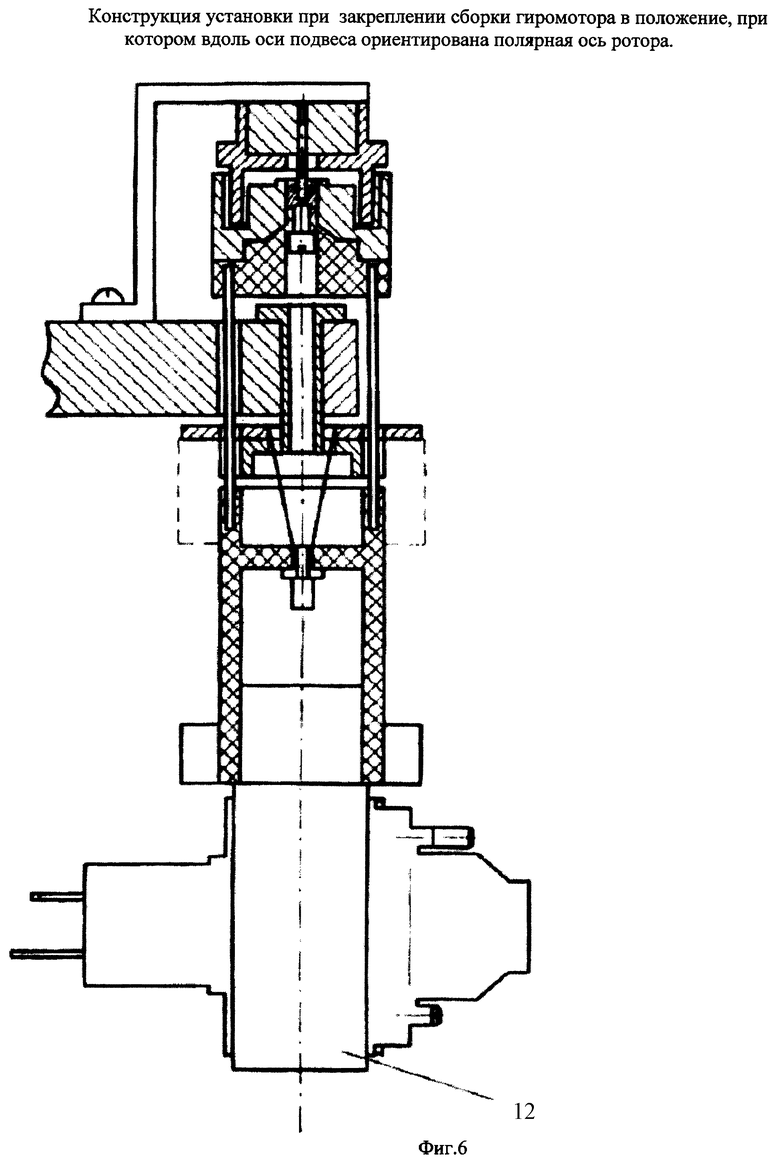
На фиг.6 показано закрепление испытуемого гиромотора на установке, соответствующее контролю низкочастотной составляющей вибраций, возникающей вследствие отставания поля ротора от поля статора испытуемого гиромотора, при этом ось вращения ротора совпадает с осью подвеса установки.
Магнитоэлектрический датчик содержит шесть магнитов и шесть катушек, установленных на кольцевом каркасе (поз.8 и 9 на фиг.5), при этом магниты установлены на подвесе, а катушки на корпусе установки, симметрично относительно оси угловых вибраций. При наличии угловых вибрационных колебаний ротора гиромотора магнит наводит в каждой паре обмоток катушек напряжения, амплитуда которых пропорциональна угловой скорости указанных колебаний.
Контроль вибраций гиромоторов осуществляется путем закрепления испытуемого гиромотора в подвесе установки при ориентации ротора либо осью вращения вдоль вертикальной оси установки (фиг.6) для контроля угловых вибраций вокруг полярной оси ротора, либо при ориентации ротора экваториальной осью вдоль вертикальной оси установки (фиг.5) для контроля угловых вибраций, возникающих вокруг экваториальной оси ротора. Поскольку в последнем случае гиромотор может возбуждать одновременно целый ряд частот, то сигнал датчика установки будет представлять собой сложную периодическую функцию.
Для выделения отдельных частот с целью определения их амплитуд - вычисления вибрационного момента Mƒ и сравнения этой величины с нормой сигнал магнитоэлектрического датчика 8, 9 установки через усилитель 11 поступает в АЦП 12 и подается в ПЭВМ 13, где реализуется программа разложения периодической функции U(t) в ряд Фурье с выделением отдельных частот и сравнением амплитуд с установленной нормой. Осциллограф 14 и анализатор спектра 15 введены для визуальной оценки результатов контроля. Генератор синусоидального напряжения 16 и магазин емкостей 17 введены для обеспечения возможности контроля трехфазных гиромоторов при питании от однофазного источника.
Предложенный способ и установка обладают следующими преимуществами в сравнении с прототипом.
1. Обеспечивают большую точность. Подвес, позволяющий контролируемому гироузлу передавать вибрации гиромотора на механическую систему, осуществляющую колебания под действием вибраций, - струна. Этот подвес имеет более определенные динамические характеристики по сравнению с поролоном.
2. Устройство можно протарировать, предварительно определив коэффициент передачи для каждой частоты вибрации.
3. Контролируемый гироузел можно закрепить в разных положениях, чтобы вокруг оси подвеса (струны) колебания возбуждались либо вибрациями ротора гиромотора, возбуждаемыми вокруг его экваториальной оси, либо вибрациями (колебаниями) ротора гиромотора вокруг его полярной оси (низкочастотные вибрации 4-7 Гц).
Источники информации
1. Ковалев М.П., Моржаков С.П., Терехова К.С.Динамическое уравновешивание роторов гироскопических систем. - М.: Оборонгиз, 1962.
2. Журавлев В.Ф., Бальмонт В.Б. Механика шарикоподшипников гироскопов. - М.: Машиностроение, 1986.
3. Авт.св. СССР №325690. Приоритет от 11.09.1990. Способ прогнозирования переменной составляющей датчика угловой скорости. / Калихман Л.Я., Улыбин В.И., Погодин А.А., Потлов А.Б., Сновалев А.Я.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ ВИБРАЦИОННЫХ РЕАКТИВНЫХ МОМЕНТОВ ГИРОМОТОРА | 2012 |
|
RU2518975C2 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ ВИБРАЦИОННЫХ РЕАКТИВНЫХ МОМЕНТОВ ГИРОМОТОРА | 2014 |
|
RU2564829C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ПРЕЦИЗИОННОГО ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 1992 |
|
RU2044274C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2007 |
|
RU2339912C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЯ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115129C1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1996 |
|
RU2142643C1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2008 |
|
RU2378618C2 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115128C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВЫХ СКОРОСТЕЙ ПОДВИЖНОГО ОБЪЕКТА С ПОМОЩЬЮ ТРЕХСТЕПЕННОГО ГИРОСКОПА С ЭЛЕКТРИЧЕСКОЙ ПРУЖИНОЙ | 1993 |
|
RU2111455C1 |
| СПОСОБ КОНТРОЛЯ ДРЕЙФА ГИРОСКОПИЧЕСКОГО ПРИБОРА | 1994 |
|
RU2115094C1 |

Изобретение относится к измерительной технике, а именно к способам и средствам измерения частот и уровней вибраций гиромоторов. Технический результат - повышение точности. Для достижения данного результата используют установку для прогнозирования переменной составляющей сигнала электромеханического датчика угловой скорости (ДУС). При этом вначале выполняют масштабирование установки с определением масштабных коэффициентов Kf на отдельных фиксированных частотах f, на которых заданы требования к переменной составляющей выходного сигнала ДУС и на которых будут определяться характеристики возбуждаемых ими угловых вибраций. Определяют допустимые значения вибрационных моментов, возбуждаемых по оси прецессии ДУС вследствие угловых вибраций гиромотора на тех же фиксированных частотах f. Записывают значения масштабных коэффициентов Kf и допустимые значения вибрационных моментов в документ, определяющий порядок контроля на установке гиромоторов данного типа. 2 н.п. ф-лы, 7 ил.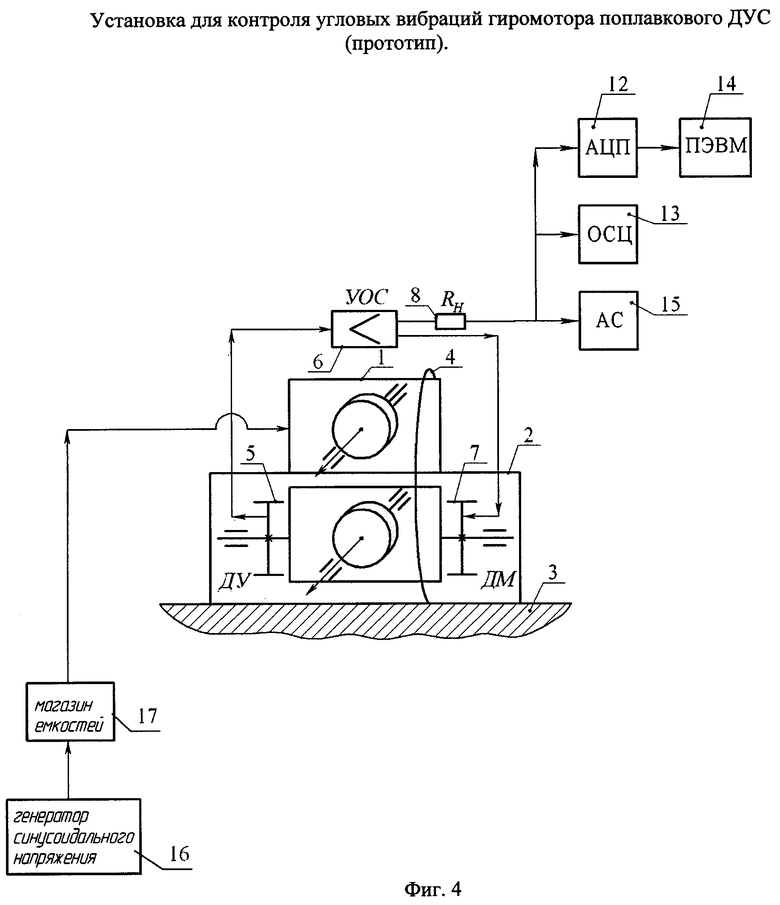
1. Способ прогнозирования переменной составляющей выходного сигнала электромеханического датчика угловой скорости (ДУС) на этапе изготовления его гиромотора по характеристикам угловых вибраций, возбуждаемых гиромотором, заключающийся в том, что контролируемый гиромотор механически соединяют с измерителем угловых вибраций, устанавливают гиромотор, соединенный с указанным измерителем, в подвес, обеспечивающий возможность возникновения угловых колебаний упомянутого соединения вокруг оси подвеса эталонного датчика угловой скорости (ДУС); включают гиромотор путем подачи питания от генератора синусоидального напряжения через магазин емкостей, обеспечивающий возможность питания трехфазных гиромоторов от однофазного источника с фазосдвигающей емкостью; осуществляют измерение выходного сигнала U(t) измерителя угловых вибраций в функции времени с помощью средства измерения, сопряженного с ПЭВМ, и программным способом по результатам разложения в ряд Фурье функции U(t) определяют характеристики вибраций гиромотора на отдельных частотах, отличающийся тем, что, с целью повышения точности определения характеристик угловых вибраций, возбуждаемых гиромотором на отдельных частотах, вокруг двух его экваториальных осей и вокруг полярной оси (оси вращения), используют установку для прогнозирования переменной составляющей сигнала электромеханического ДУС, при этом вначале выполняют масштабирование установки с определением масштабных коэффициентов Kf на отдельных фиксированных частотах f, на которых заданы требования к переменной составляющей выходного сигнала ДУС  и на которых при испытаниях всех гиромоторов данного типа будут определяться характеристики возбуждаемых ими угловых вибраций; определяют допустимые значения
и на которых при испытаниях всех гиромоторов данного типа будут определяться характеристики возбуждаемых ими угловых вибраций; определяют допустимые значения  вибрационных моментов, возбуждаемых по оси прецессии ДУС вследствие угловых вибраций гиромотора на тех же фиксированных частотах f; записывают значения масштабных коэффициентов Kf и допустимые значения
вибрационных моментов, возбуждаемых по оси прецессии ДУС вследствие угловых вибраций гиромотора на тех же фиксированных частотах f; записывают значения масштабных коэффициентов Kf и допустимые значения  вибрационных моментов в документ, определяющий порядок контроля на установке гиромоторов данного типа; затем каждый контролируемый гиромотор закрепляют на подвесе установки, при этом устанавливают гиромотор последовательно в три положения, в которых вдоль оси подвеса установки ориентируется сначала первая экваториальная ось ротора, затем вторая экваториальная ось, перпендикулярная оси вращения ротора гиромотора, затем полярная ось гиромотора; в каждом положении включают гиромотор, задавая напряжение и частоту питания, соответствующие режиму работы гиромотора в составе ДУС; используя амплитудные значения Uf выходного сигнала измерителя угловых вибраций установки, получаемые по результатам разложения в ряд Фурье функции U(t) - выходного сигнала измерителя угловых вибраций установки, рассчитывают по формуле Mf=Kf·Uf амплитудные значения вибрационного момента, возбуждаемого гиромотором на каждой фиксированной частоте; принимают значения Mf в качестве характеристики угловых вибраций гиромотора и сравнивают полученные значения Mf с допустимым для этой частоты значением вибрационного момента [Mf];
вибрационных моментов в документ, определяющий порядок контроля на установке гиромоторов данного типа; затем каждый контролируемый гиромотор закрепляют на подвесе установки, при этом устанавливают гиромотор последовательно в три положения, в которых вдоль оси подвеса установки ориентируется сначала первая экваториальная ось ротора, затем вторая экваториальная ось, перпендикулярная оси вращения ротора гиромотора, затем полярная ось гиромотора; в каждом положении включают гиромотор, задавая напряжение и частоту питания, соответствующие режиму работы гиромотора в составе ДУС; используя амплитудные значения Uf выходного сигнала измерителя угловых вибраций установки, получаемые по результатам разложения в ряд Фурье функции U(t) - выходного сигнала измерителя угловых вибраций установки, рассчитывают по формуле Mf=Kf·Uf амплитудные значения вибрационного момента, возбуждаемого гиромотором на каждой фиксированной частоте; принимают значения Mf в качестве характеристики угловых вибраций гиромотора и сравнивают полученные значения Mf с допустимым для этой частоты значением вибрационного момента [Mf];
выполняют масштабирование установки путем определения масштабных коэффициентов Kf на фиксированных частотах f, для чего закрепляют эталонный образец гиромотора на подвесе установки, ориентируя экваториальную ось гиромотора вдоль подвеса установки, предварительно устанавливают на ротор эталонного образца гиромотора микрогрузы массой m на плече h, т.е. искусственно создают динамическую разбалансировку ротора гиромотора, задают от генератора синусоидальных колебаний напряжения питания гиромотора с фиксированными частотами f, на которых необходимо определить характеристики возбуждаемых гиромотором вибраций; рассчитывают величину вибрационного момента, возникающего при работе гиромотора, по формуле Mf=m·(2·π·f)·R·h, где R - радиус ротора, f - частота вращения ротора (Гц), 2·π·f - угловая скорость вращения (1/с); при задании напряжения питания гиромотора с каждой фиксированной частотой измеряют выходное напряжение Uf измерителя угловой вибрации установки и рассчитывают масштабный коэффициент Kf установки для каждой частоты f по формуле 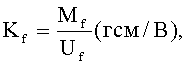
определяют допустимые значения  вибрационных моментов, возбуждаемых гиромотором данного типа на каждой фиксированной частоте f, для экваториальных осей ротора по формуле
вибрационных моментов, возбуждаемых гиромотором данного типа на каждой фиксированной частоте f, для экваториальных осей ротора по формуле
где Н - кинетический момент электромеханического ДУС, для которого предназначен гиромотор (г·см·с);  - заданное в качестве нормы допустимое значение переменной составляющей выходного сигнала ДУС (1/с); для полярной оси ротора по формуле
- заданное в качестве нормы допустимое значение переменной составляющей выходного сигнала ДУС (1/с); для полярной оси ротора по формуле

где γ - максимально возможное значение угла неперпендикулярности оси вращения ротора к оси прецессии ДУС после установки гиромотора в составе гироузла в ДУС.
2. Установка для прогнозирования переменной составляющей выходного сигнала электромеханического датчика угловой скорости (ДУС) на этапе изготовления его гиромотора по характеристикам угловых колебаний, возбуждаемых гиромотором, содержащая измеритель характеристик угловых вибраций, средство механического соединения проверяемого гиромотора с измерителем угловых вибраций и подвес, обеспечивающий возможность возникновения вокруг оси подвеса установки под действием возбуждаемых гиромотором вибраций угловых колебаний проверяемого гиромотора, механически соединенного с подвижной частью измерителя характеристик угловых колебаний; средство измерения выходного сигнала измерителя характеристик угловых вибраций, стыкуемое с ПЭВМ, отличающаяся тем, что в качестве измерителя характеристик (угловой скорости) угловых вибраций используется магнитоэлектрический датчик, содержащий n магнитов и n катушек, при этом магниты установлены на подвесе, а катушки на корпусе установки, механическое соединение проверяемого гиромотора с измерителем угловых вибраций выполнено в виде цанги, к которой в специальном технологическом корпусе, допускающем закрепление гиромотора в трех положениях, крепится проверяемый гиромотор; на цанге закреплен кольцевой каркас с равномерно установленными магнитами магнитоэлектрического датчика; подвес выполнен в виде трех тонких металлических струн, один конец которых приреплен к цанге, а второй - к корпусу установки; введена центрирующая камневая опора, бушон которой закреплен по оси цанги, а цапфа установлена неподвижно на корпусе установки, при этом подвод питания к проверяемому гиромотору выполнен через три металлические струны подвеса, введено арретирующее устройство для обеспечения сохранности установки в неработающем состоянии.
| СПОСОБ ДИАГНОСТИКИ СОСТОЯНИЯ ОПОР РОТОРА ГИРОСКОПА | 1988 |
|
SU1840748A1 |
| КОВАЛЕВ М.П., МОРЖАКОВ С.П., ТЕРЕХОВА К.С | |||
| Динамическое уравновешивание роторов гироскопических систем | |||
| - М.: Оборонгиз, 1962 | |||
| ЖУРАВЛЕВ В.Ф., БАЛЬМОНТ В.Б | |||
| Механика шарикоподшипников гироскопов | |||
| - М.: Машиностроение, 1986 | |||
| СПОСОБ ДИАГНОСТИКИ РОТОРА ГИРОСКОПА НА ГАЗОДИНАМИЧЕСКОЙ ОПОРЕ | 1984 |
|
SU1840738A1 |
| Способ прогнозирования положенияТРАНСпОРТНОгО СРЕдСТВА | 1979 |
|
SU823180A1 |
| СПОСОБ АЛГОРИТМИЧЕСКОЙ КОМПЕНСАЦИИ ПОГРЕШНОСТИ ГИРОКОМПАСИРОВАНИЯ С ПРИМЕНЕНИЕМ ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 2001 |
|
RU2194948C1 |

