1Л
С
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения давления | 1990 |
|
SU1831668A3 |
| Способ определения коэффициента трения в опорах осциллятора типа баланс-спираль | 1989 |
|
SU1748142A1 |
| Устройство для стабилизации амплитуды колебаний осциллятора | 1987 |
|
SU1509823A1 |
| ГЕНЕРАТОР ШУМА | 1990 |
|
RU2030830C1 |
| Преобразователь перемещений | 1990 |
|
SU1728639A1 |
| Измеритель напряженности электростатического поля | 2016 |
|
RU2643701C1 |
| Генератор импульсов | 1982 |
|
SU1109892A1 |
| ВНУТРИТРУБНЫЙ ДЕФЕКТОСКОП (ВАРИАНТЫ) И СПОСОБ ЕГО ПРИМЕНЕНИЯ | 2009 |
|
RU2400738C1 |
| ИНДУКТИВНЫЙ БЕСКОНТАКТНЫЙ ПЕРЕКЛЮЧАТЕЛЬ | 2002 |
|
RU2223567C2 |
| УНИВЕРСАЛЬНЫЙ СЕЛЕКТИВНЫЙ ИНДУКЦИОННЫЙ МЕТАЛЛОИСКАТЕЛЬ | 2021 |
|
RU2772406C1 |
Использование: изобретение относится к электромеханическим датчикам давления и может быть использовано для измерения давления различных сред. Цель изобретения - повышение точности датчика давления. Сущность изобретения: датчик давления содержит упругий чувствительный элемент, связанный с преобразователем перемещения упругого элемента в электрический сигнал. Преобразователь перемещения выполнен в виде осциллятора типа баланс-спираль с электронной схемой привода, при этом упругий чувствительный элемент кинематически связан с механизмом изменения действующей длины спирали баланса, а выходом датчика является выход электронной схемы привода. Новым в датчике давления является наличие осциллятора (колебательной системы) типа баланс-спираль него связь с упругим чувствительным элементом, в результате чего по- вышаются точностные характеристики датчика давления. 3 ил.
Изобретение относится к приборостроению, в частности к устройствам для измерения давления, а именно к электромеханическим датчикам давления.
Известны электромеханические дистанционные манометры, которые можно разделить на пружинные и силовые. В пружинном манометре электрический сигнал получается на основе преобразования перемещения, а в силовых - на основе преобразования силы, развиваемой чувствительным элементом (или путем уравновешивания этой силы).
В зависимости от способа измерения силы, развиваемой чувствительным элементом, различают две разновидности манометров силового типа: с прямым преобразованием силы в электрический сигнал и с силовой компенсацией (с уравновешиванием).
Электромеханический манометр с прямым преобразованием силы в электрический сигнал состоит из датчика и электрической дистанционной передачи. Рассмотрим обобщенные принципиальные схемы датчиков с неупругим чувствительным элементом.
В первом случае чувствительный элемент представляет собой поршень, расположенный в цилиндре, в левую и в правую полости которого подаются давления Pi и Ра. Под действием разности давлений Р PI - Ра поршень развивает силу. Поршень механически связан с элементом, обладающим свойством непосредственного преобразования силы Р в электрический параметр Z (сопротивление, индуктивность, емкость.
VI Х| 00
ел о ел
напряжение или др.). Чувствительный элемент в виде поршня имеет недостатки: он обладает большой погрешностью от трения, кроме того, возможно перетекание жидкости или газа из одной полости в другую.
От этих недостатков свободен датчик с упругим чувствительным элементом, выполненный в виде мембраны 4, разделяющей корпус 5 на две полости, в которые подаются давления PI и Р2. Подвижный центр мем- браны опирается на электрический преобразователь 6, выдающий сигнал Z, зависящий от приложенной силы. Для преобразования силы в электрический сигнал могут быть использованы: магнитоупругие, угольные и пьезоэлектрические преобразователи.
Пьезоэлектрический преобразователь непригоден для измерения постоянного или медленно изменяющегося давления. Это объясняется тем, что возникающие на кварце заряды не могут сохраняться длительное время и исчезают за доли секунды из-за утечки в элементах измерительной схемы.
Магнитоупругие и угольные преобразо- ватели, в отличие от пьезоэлектрического, могут работать при постоянном и переменном давлении, но точность преобразования силы в электрический сигнал (L или R) невысока из-за того, что их характеристики нелинейны, обладают гистерезисом и температурными погрешностями,
Известен пружинный датчик давления, где в качестве упругого чувствительного элемента используется мембрана, которая через передаточный механизм связана с по- тенш/юметрическим преобразователем перемещений. Недостатком потенциометри- ческих преобразователей перемещений является наличие скользящих контактов, сни- жающих надежность прибора.
Этот недостаток устранен в индуктивном датчике давления, который принимается за прототип.
Рассмотрим типичную конструкцию этого датчика. Датчик содержит упругий чувствительный элемент (мембрана или сильфон), который соединен передаточным механизмом с якорем индуктивного преобразователя перемещений.
Работа индуктивного датчика происходит следующим образом.
Измеряемое давление воздействует на упругий чувствительный элемент, который перемещает якорь индуктивного преобра- зователя перемещений. При перемещении якоря от нейтрального положения индуктивность Li одной катушки увеличивается, а индуктивность 1.2 другой катушки уменьшается. Так как катушки включены в соседние
плечи мостовой схемы, то происходит разбаланс схемы и в диагонали моста появляется выходное напряжение, соответствующее величине перемещения якоря и, следовательно, соответствующее величине измеряемого давления. Первичные обмотки индуктивного преобразователя перемещений питаются током повышенной частоты (28 кГц), который генерируется полупроводниковым преобразователем. Выходное напряжение со вторичных обмоток индуктивного преобразователя перемещений выпрямляется и подается на выходные клеммы штепсельного разъема.
Рассмотренный датчик давления содержит индуктивный преобразователь перемещений, который относится к группе электромагнитных чувствительных элементов. Точностные характеристики датчика оп- ределяются в основном точностными характеристиками преобразователя перемещений. Результаты измерения будут зависеть от температуры (т.к. изменяется сопротивление обмоток индуктивного преобразователя), амплитуды и частоты напряжения питания. Кроме того, на якорь индуктивного преобразователя перемещений действует сила притяжения к сердечнику, связанная с магнитным действием тока, протекающего в обмотках преобразователя, что также отрицательно влияет на точностные характеристики датчика.
Целью изобретения является повышение точностных характеристик датчика давления.
Цель достигается тем, что в известном датчике давления, содержащем упругий чувствительный элемент, связанный с преобразователем перемещения упругого элемента в электрический сигнал, преобразователь перемещения выполнен в виде осциллятора типа баланс-спираль с электронной схемой привода, при этом упругий чувствительный элемент кинематически связан с механизмом изменения действующей длины спирали баланса, а выходом датчика является выход электронной схемы привода.
Предложенная конструкция устраняет недостатки прототипа, отмеченные выше, содержит в своем составе осциллятор типа баланс-спираль, что повышает точностные характеристики датчика давления.
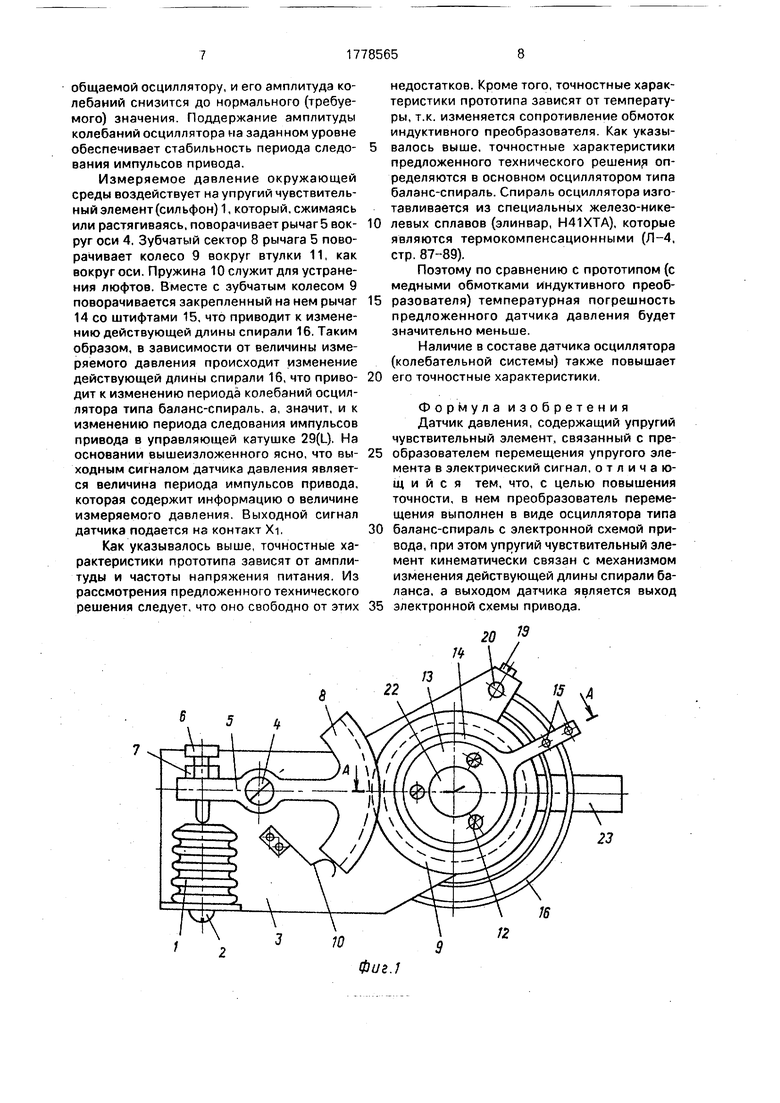
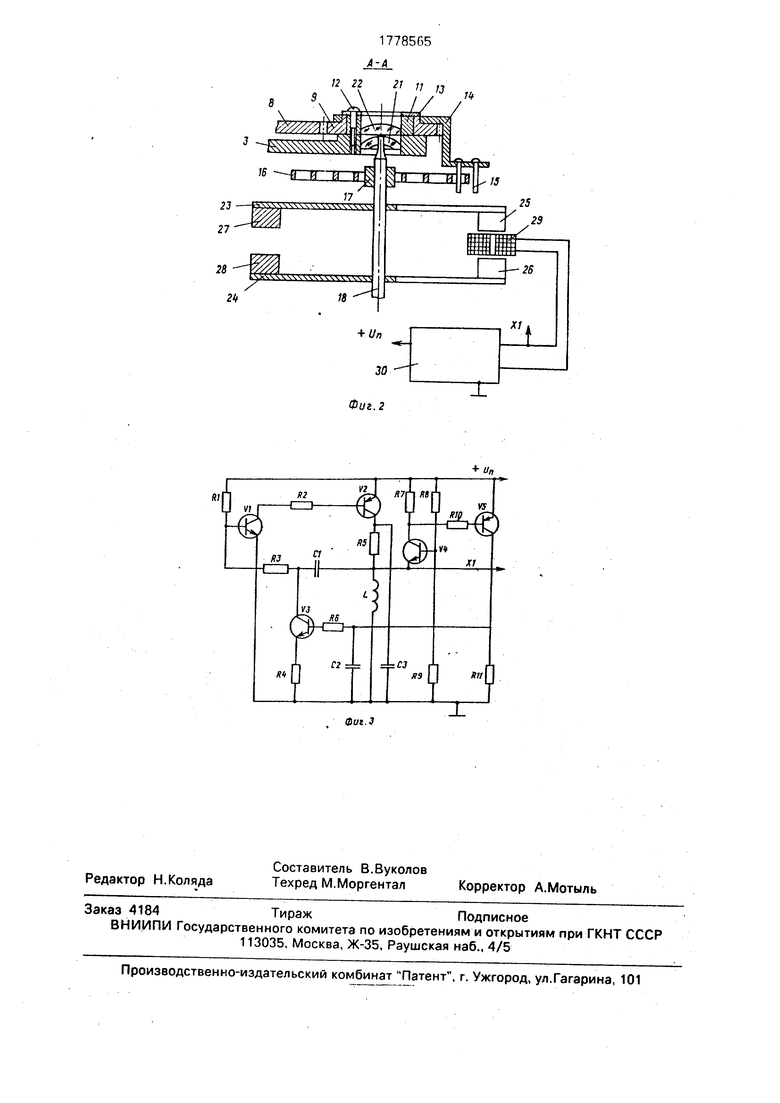
На фиг. 1 изображена конструкция датчика давления и показана связь упругого чувствительного элемента с осциллятором типа баланс-спираль; на фиг. 2 - конструкция передаточного механизма и осциллятора типа баланс-спираль, а также условно показана схема привода; на фиг. 3 - принципиальная схема привода осциллятора типа баланс-спираль
Датчик давления содержит упругий чувствительный элемент (сильфон) 1, закрепленный винтом 2 на основании 3. На том же основании 3 размещен передаточный механизм, который состоит из установленного на оси 4 рычага 5, один конец которого соединен с упругим чувствительным элементом 1 с помощью регулировочного винта 6, законтренного гайкой 7, а другой конец рычага 5 выполнен в виде зубчатого сектора 8 и соединен с зубчатым колесом 9 и .пружиной
Баланс, закрепленный на оси 18, и спираль 16 образуют осциллятор (колебательную систему) типа баланс-спираль.
В зазоре постоянных магнитов 25, 26 размещена управляющая катушка 29(L). соединенная со схемой привода 30 и выходной клеммой Xi датчика давления.
Осциллятор типа баланс-спираль, рассмотренный выше, управляющая катушка 29(L) и схема привода 30 образуют электронно-механический спусковой регулятор.
Схема привода 30 изображена на фиг, 3 и предназначена для возбуждения и поддержания колебательных движений осциллятора типа баланс-спираль.
Схема привода представляет собой ас- табильную релаксационную схему и содержит два усилительных каскада, сильно связанных друг с другом обратной связью и построенных на базе двух взаимодополняющих друг другл структур транзисторов Vi и V2. Кроме тогп. в схему привода, как составная ее часть схема стабилизации амплитуды кочсГтяний осциллятора типа баланс-спираль, выполненная на транзисторах Vs-Vs.
Предложенный датчик давления работает следующим образом. При подаче на- 5 пряжения питания Un -постоянного тока схема привода 30 вырабатывает прямоугольные импульсы напряжения с определенной амплитудой, длительностью и периодом, которые поступают науправляю0 щую катушку 29(1.), следовательно, через нее будет проходить импульсный ток, так называемые импульсы привода, образующие импульсное магнитное поле. Взаимодействие этого поля с полем постоянных
5 магнитов 25, 26 создает момент импульса, возбуждающий автоколебательное движение осциллятора типа баланс-спираль. При колебаниях осциллятора магнитное поле постоянных магнитов 25, 26 пересекает вит0 ки управляющей катушки 29(L) и в ней появ- ляется индуцированное напряжение, вследствие чего происходит синхронизация импульсов привода релаксатора. Таким образом, период следования импульсов при5 вода будет определяться параметрами осциллятора: массой баланса и действующей длиной спирали 16. Конденсатор СЗ служит для срыва высокочастотной генерации.
0Стабилизация амплитуды колебаний осциллятора при увеличении нагрузки и изменении напряжения питания осуществляется следующим образом. Положительное индуцируемое напряжение в управляющей ка5 тушке L (фиг. 3) сравнивается с величиной опорного порогового напряжения между эмиттером и базой транзистора V4. Опорное пороговое напряжение определяется делителем Re, Rg. Если в результате сравнения
0 индуцированное напряжение по величине больше или меньше опорного порогового напряжения, то происходит больший или меньший заряд конденсатора С2 через транзистор Уз, который выполняет функции пе5 ременного сопротивления. При этом происходит перераспределение цепей разряда конденсатора Ci, что, в свою очередь, приводит к изменению длительности генерируемого импульса. Так, например, при
0 увеличении напряжения питания возрастает амплитуда колебаний осциллятора, что приводит к увеличению индуцируемого в катушке L напряжения. Это напряжение превысит опорное пороговое напряжение и
5 приведет к отпиранию транзистора Vs и заряду конденсатора С2. Открывшийся транзистор Va создает дополнительную цепь разряда конденсатора Ci и длительность импульса привода уменьшится, следовательно, уменьшится количество энергии, сообщаемой осциллятору, и его амплитуда колебаний снизится до нормального (требуемого) значения. Поддержание амплитуды колебаний осциллятора на заданном уровне обеспечивает стабильность периода следования импульсов привода.
Измеряемое давление окружающей среды воздействует на упругий чувствительный элемент (сил ьфон}1, который, сжимаясь или растягиваясь, поворачивает рычаг 5 вокруг оси 4, Зубчатый сектор 8 рычага 5 поворачивает колесо 9 вокруг втулки 11, как вокруг оси. Пружина 10 служит для устранения люфтов. Вместе с зубчатым колесом 9 поворачивается закрепленный на нем рычаг 14 со штифтами 15, что приводит к изменению действующей длины спирали 16. Таким образом, в зависимости от величины измеряемого давления происходит изменение действующей длины спирали 16, что приводит к изменению периода колебаний осциллятора типа баланс-спираль, а, значит, и к изменению периода следования импульсов привода в управляющей катушке 29(L). На основании вышеизложенного ясно, что выходным сигналом датчика давления является величина периода импульсов привода, которая содержит информацию о величине измеряемого давления. Выходной сигнал датчика подается на контакт XL
Как указывалось выше, точностные характеристики прототипа зависят от амплитуды и частоты напряжения питания. Из рассмотрения предложенного технического решения следует, что оно свободно от этих
недостатков. Кроме того, точностные характеристики прототипа зависят от температуры, т.к. изменяется сопротивление обмоток индуктивного преобразователя. Как указывалось выше, точностные характеристики предложенного технического решения определяются в основном осциллятором типа баланс-спираль. Спираль осциллятора изготавливается из специальных железо-никелевых сплавов (элинвар, Н41ХТА), которые являются термокомпенсационными (Л-4, стр. 87-89).
Поэтому по сравнению с прототипом (с медными обмотками индуктивного преобразователя) температурная погрешность предложенного датчика давления будет значительно меньше.
Наличие в составе датчика осциллятора (колебательной системы) также повышает
его точностные характеристики
Формула изобретения Датчик давления, содержащий упругий чувствительный элемент, связанный с преобразователем перемещения упругого элемента в электрический сигнал, отличающийся тем, что, с целью повышения точности, в нем преобразователь перемещения выполнен в виде осциллятора типа
баланс-спираль с электронной схемой привода, при этом упругий чувствительный элемент кинематически связан с механизмом изменения действующей длины спирали баланса, а выходом датчика является выход
электронной схемы привода.
16
Фиг.1
12 22 2J jj n 9 I
ArfT
2k
-г
| Браславский Д.А | |||
| и др | |||
| Авиационные приборы и автоматы | |||
| Чугунный экономайзер с вертикально-расположенными трубами с поперечными ребрами | 1911 |
|
SU1978A1 |
| Деревянный коленчатый рычаг | 1919 |
|
SU150A1 |
| Там же, с | |||
| Способ образования азокрасителей на волокнах | 1918 |
|
SU152A1 |
| рис | |||
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
