Изобретение относится к измерительной технике, может быть использовано при метрологическом обеспечении испытаний машин и механизмов, в особенности для поверки средств измерения крутящего момента, определения жесткости валов общего назначения, а также в конструкциях по созданию и передаче крутящего момента при статическом характере его применения для стабилизации первоначально заданного его значения, и является усовершенствованием стенда по авт.св № 932322.
Известный стенд градуировки и определения жесткости ротационных динамометров и тензометрических валов содержит жестко связанный с основанием стенда и установленный на валу закручивания цилиндр нагружения, в котором крышки разделяют внутреннюю полость на две камеры, в каждой из которых размещено по два поршня, образующих с крышками и корпусом цилиндра полости и связанных между собой кулисой, имеющей возможность осевого перемещения и соединенной с плечом рычага при этом кулиса снабжена указателем ее перемещения вдоль оси цилиндра Стенд позволяет визуально и с большой точностью фиксировать малые значения угла поворота вала закручивания и отличается совмещением функций нескольких механизмов в одном.
Недостатком данного стенда является невысокая точность градуировки и определения жесткости, так как конструкция стенда обеспечивает повышенную точность лишь фиксирования угла поворота вала за2
О
VI
ы VJ
ю
кручивания. а не постоянство крутящего момента.
Цель изобретения - повышение точности поверки средств измерения крутящего момента и определения жесткости валов путем обеспечения постоянства крутящего момента,
Поставленная цель достигается тем, что в стенде для градуировки определения жесткости, содержащем установленный на валу закручивания цмлиндр нагружения, в котором размещен поршень, образующий с крышкой и корпусом цилиндра полость и связанный с кулисой, имеющей возможность осеаого перемещения и соединенной с плечом рычага, при этом кулиса снабжена указателем ее перемещения вдоль оси цилиндра, поверхность кулисы, контактирующая с рычагом, выполнена криволинейной, причем координаты текущей i-й точки кривой определяются из соотношения
Xi I sin a.
V$Ь ,.,Q ..01.-.0-gfo-J
„,. . I I -.-- .1 - ---- f I 11 111 .. - --
-0+Y.-..Q-I Геу,0-2Јо-сП (29 (29 j
где X - ось абсцисс, совпадающая с перпендикуляром, восстановленным из точки продольной оси цилиндра нагружения на расстоянии длины рычага от оси вала закручивания к точке контакта кулисы и рычага, имеющая положительное направление е сторону поворота рычага на угол п по часовой стрелке;
Y - ось ординат, совпадающая с осью цилиндра нагружения и имеющая положительное направление в сторожу от центра вращения рычага к оси абсцисс
5 I (sin а - sin аз i);
° ctg (« - fi ) - ctg («i - 1 - i )
, ГУ|-|+Е(У.пМ. ctfr(ct,-tf,V5inet,., ttq(ftj;.,-,.,ll
tсЦ(Х1-чМ-еЩ«;-,-,-|1
-f-einK,lcl(D( -Cf,1)
9ИсЦ(«,-иЛ
clg.-y Vtt(3tet-i-tPi-il
Y,.,.r)tf., clglrf.-uM-smtf,-, i-cpi-tVl a,.q
J.Y -eVwV-s-.nV,.,b
coaXCs.T.
nteSr e.neM oe Ms.n,-.,) .
Сущность изобретения заключается в ледующем
Выполнение рабочей поверхности каждой из кулис криволинейной позволяет при движении кулисы добиться такой переменности в приложении поворачивающей рычаг
силы, действующей в контакте кулисы с рычагом, которая компенсирует изменение крутящего момента, прикладываемого к рычагу, происходящее вследствие изменения (по мере поворота рычага) угла между ними
0 и продольной осью цилиндра нагружения (неизменное направление действия первоначальной силы, действующей на поршень цилиндра нагружения вдоль его оси). Подобная компенсация изменения крутящего
5 момента силы, прикладываемого к рычагу, обеспечивает постоянство приложения момента при повороте рычага от (|-1)-й к 1-й точке, повышая тем самым точность работы стенда
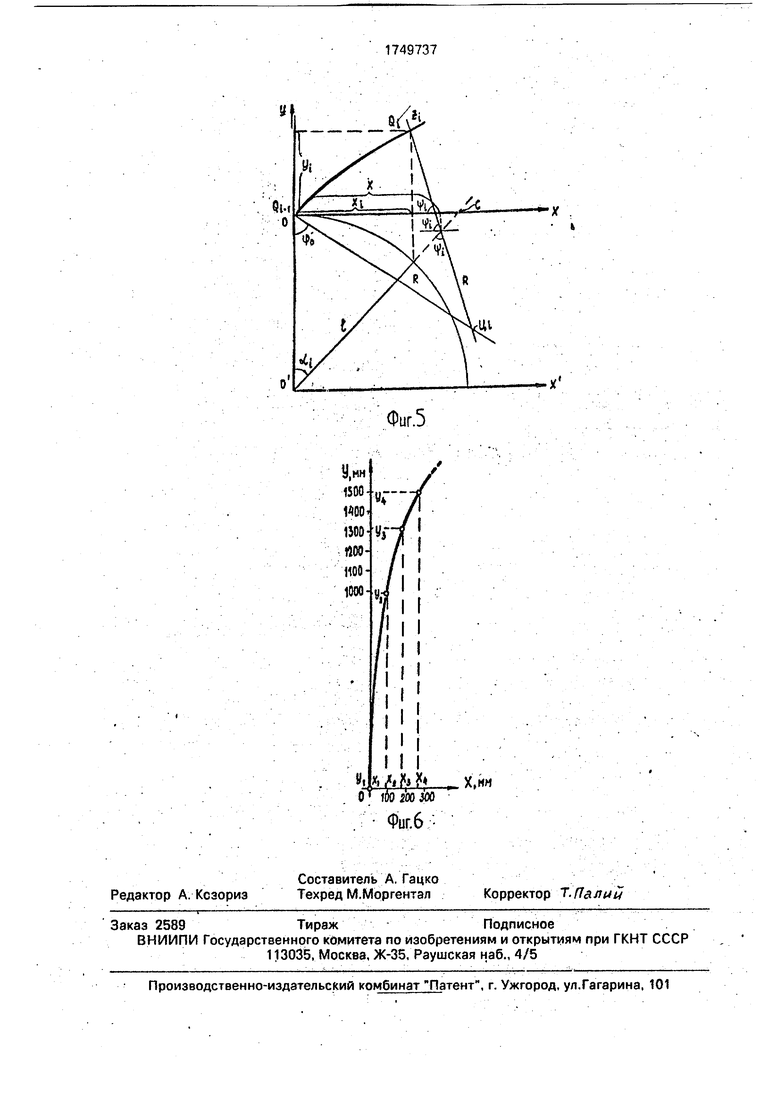
0 На фиг.1 дана конструктивная схема стенда; на фиг 2 - то же, вид сбоку; на фиг 3 - кулиса с криволинейной поверхностью, на фиг 4 - схема сил, действующих в контакте рычага и кулисы; на фиг.5 - схема
5 реализации кривой на фиг 6 - вид кривой
Приведем положения, исходя из которых выведем соотношения, характеризующие искомый криволинейный профиль Величина крутящего момента опреде0 ляется тангенциальными силами Рз и Ре (фиг 4). Поскольку движене кулисы в направлении действия силы давления Р на поршень (т.е вдоль оси цилиндра нагружения) должно иметь место при любом рзссматри5 ваемом ж - 0 90°. то результирующая Рт сил РЗ и Рб выразится Рт Рз - Рг Дяя сохранения постоянным крутящего момента сила Рт должна быть постоянной по мере поворота рычага и приложена к нему на
0 неизменной длине Последнее обеспечивается конструкцией стенда, а из условия постоянства силы Рт можно выявить соотношение, характеризующее геометрию искомой кривой и заложить ее в конструк5 цию стенда Требуемое соотношение должно включать в себя текущий угол (% поворота рычага и угол f между нормалью к поверхности кулисы в точке контакта ее с рычагом и осью рычага п текущий
50 момент его поворота,
Из схемы сил, действующих в контакте рычага и кулисы (фиг 4), следует
Рз P2-sln р Ре Pvcosnri, но Pi
55 P2 Sin (р| - О)) P2 Sln (f) - 0|) COS 7j
но
cos ( - «Г)
Рз
Р sin ft cos (ft -a,)
-ЧЈ№&-™«-Р tg(pi-Oi) . Сила Рт выразится как
.Р6
cos (pi-ai) -Ptg(pi- oti) cos at(1)
Окончательно
рт Р г s n У LCOS(p|-Oi )
-tg(pi -ai)cosaii.(2)
Из требуемых условий сила Рт должна быть постоянной при любых значениях углов at и pi. В соотношении (2) сила Р условиями работы стенда постоянна (давление воздуха на поршень в рабочих полостях можно поддерживать неизменным). Поэтому можно записать
coSS(n/-a.))
-Ј(Ј- const).(3)
Значение Ј должно быть постоянным при любом значении (д и соответствующем ему значении pi и характеризует соотношение углов, определяющих величину скручивающей нагрузки в точке контакта рычага и кулисы при каждом заданном оа.
Из уравнения (2) видно, что величина Ј определяет как бы расклинивающее действие кулисы в каждый данный момент си поворота рычага, т.е. полезную силу Рт. скручивающую рычаг. устанавливается превышение силы Рт над силой Р. Конкретное значение Ј при заданных силе Р и длине рычага I определяет значение расклинивающей силы Рт. Поскольку расклинивающая сила в любом соединении, работающем по принципу клина, определяется углом клина, то выходит, что значением Ј задается угол клина, который можно представить как угол ft между нормалью к рабо- чей поверхности (профилю) клина и направлением приложения силы Р.
Поскольку мы ищем клин с криволинейным рабочим профилем, то каждому значению при заданном Ј будет соответствовать свое значение Д, т.е. в каждый момент а в точке контакта рычага и кулисы криволинейный клин можно заменить приведенным клином, т.е. прямолинейным с углом клина fi. При о 0° угол / совпадает с углом р и составляет 90°, поскольку при 05 0° ось рычага совпадает с направлением силы Р (вдоль оси цилиндра нагружения).
Уравнение (2) имеет место в диапазоне О) 0...900, причем при as 0° оно принимает значение, равное 0, а при CG 90° - равное 1, т.е. при « 0° Ј 0, а при о 90°
м.
Оценим численно соотношение ж, pi, Ј, задаваясь промежуточным значением а 5° и значением Ј 2 (двукратное превышение силы Рт над силой Р). т.е. при этих о|иЈ определяем pi.
. Соотношение имеет вид (3): (4Vs)-cos5-2y Ji lH: inUЈii5)„,
(СР -5 ...соэ(чг5) cos (ч -6)
cos
Sin tf;-Sm(Cf;-S)-COS5
:2}
0cos (if:-5)
5in f;-sin 4 ;-cos5-CQ55+coS4 ;-sin5-co5S
COSl COS 5 +5 mCf;-6in5 S .n p;-sir Ср-.-О.Чдй О.дЧй+еозСр;.0.087-0,996
-2; 2;
СО5Ср; 0,9в + -0,087
5 SJn cy;-0.99 -5 mCft+co54V 0.087
cosqij-0,996 + smtyj-0,087
или sin ,992 sin p +0,087cos p -1,992 xcos - 0,174 sin p 0;
sin pi (1 -0,992-0,174) + 0 -(-cos pi (0,087- 1,992)-0;
- 0,166 sin pi - 1,905 cos pi 0;
-0,166 sin pr 1,905 V 1 sin 2 0;
-0,166 sin pi 1,905 V 1 - ajn 2 ; 0,028 sin2 pr 3, 629 (1 - sin12 p,}; 0,028 sin2 (pr 3,629 - 3,629 sin2 pi; 0,028 sin2 pi + 3,629 sin2 pi 3,629; 3,657 sin2 pi 3,629; sin2 pi 0,992; sin pi 0,996; pi arcsin 0,996 85°, При GJj 30° имеем
sin If;
cos.)-00530-2; sinq,-sinqi; cos30 00530 cosЦ ; -sinao-cosSQ
cos .cos 30 +s. nCf;-Sir)
Sin(f;-sl i(f..c05 Cfi-O.S
или
COS Ч; - 5;n Q,-0,5 ,-0,75 Siyiq ; 0,433cOS CP;
0,866-oosq i +0,5-sin 2
sin pi- 0,75 sin pi + 0,433 cos pi - - 1,732 cos pi - sin pi 0; -0,75 sin pi - 1,299 cpsprO; -0.75 sin pi - 1,299 V 1 - sin 2 0;
0,75 sin pi 1,299 V- - S|n2p| 0;
,2,л
или 0,562 1,69(1-sin 1 pi); 0,562 sin2 pi 1,69 -1,69 sin2 p,; 0,562 sin2 pi + 1.69 sin2 pi T,69; 2.252 sin2 pi 1.69: sin2 pi 0,759; sin pi 0,866;
pi arcsin 0,866 60°. Таким образом, производя подобные вычисления для нескольких значений а, замечаем, что соотношения а, pi и Ј вполне реальные (при Ј 2), поскольку при малых
значениях «значения lp приближаются к таковым для кулисы с прямолинейным клином, а далее отклоняются от последних, достигая при больших значениях а значительных отклонений.
Для вывода в дальнейшем уравнения искомого криволинейного профиля необходимо выразить из соотношения (3) (fl через at задав Ј равным 2.
Тогда можно записать
.. МЧ;-сЦ eost(. COS(4,-«;) coS(cf;-N;)
Sintj;-5inif;-cosgc ;«cos4; 5inot .co5ii .
cos t, cos «; ,
emt -SlnVfCOS HCOetf; -slnK1, -
«costf .-uctteCf, -coso ;-Ј3mcf; slritf;«0j 5(.{,Ц-со54« -25 тб(-,)+со5Ч; (vio(; x
co t ;-2cos «И-0. Введем обозначения
1 - cos2 a - 2 sin a A. sin at cos «i-2 cos «f 8.
Тогда
A sin (fl + В cos yi 0; или
0:
Asiny + B Vi -Sin2
A slrA0 B(1 - ); A2sin tf5| B -B2 (A2 + B2) sin2 ip В2;
2o2
Sin у
В
А2 +В2
sin
& ±Y
В
А2 +В2
Поскольку р лежит в предела учитываем только положительные sin yy.
sin (р т :
Гд21о2
А 4-В
fi - arcsin
A 2 + В 2
|2
A (1 -cos nn-2 sinmr
(sin2 05 -2 slnai)2;
В (sin «i cos «i-2cbs «i )2
Sin2 «I COS2 «| - 4 Sin Oi COS2 Oi
+ 4 cos2 a, cos2 a, (sin2 a -4 sin ai + 4) cos2 «i (sin a; - 2
Окончательно
.co iUinrt..
4- artSll ly(«r25;nW,4co57c ;(sin0t;-2)i
(4)
При ai - 0° угол между осью рычага и нормалью к профилю кулисы в точке их контакта pi 90°, а при «i 90° р 0
При Oj 5° угол / 85°, при «, 30° угол 60°-; т.е. видно, что угол ifi при увеличении сц уменьшается, причем поскольку выводят его из предположения, что
sin , ч„
co8(p%))-COSQ -12- то при любых аз и вычисленном по уравнению (4) (р соотношение (3) постоянно, а сле- довательно, по уравнению (2) сила Рт постоянна.
Поэтому при.поиске уравнения криволинейного рабочего профиля кулисы,в котором Оы фигурировали конструктивные параметры, в том числе и угол fi угол р необходимо брать из уравнения (4).
Определим уравнения для координат текущей i-й точки криволинейного профиля кулисы, требуемые для ее геометрической реализации. Чтобы не усложнять вывод аналитических соотношений, примем за перво- начальное положение механизма такое его положение, когда плечо рычага (кратчайшее расстояние от оси вала закручивания к точке контакта рычага с кулисой) совпадает с осью цилиндра нагружения.
Найдем уравнение нормали к искомой кривой в 1-й ее точке, т.е. уравнение прямой QiU, (фиг.5) Xi .
Уравнение нормали QiUi будем мекать в виде:
35
Vfr-.MM
. -nnt-
V;-s-(
Отсюда уравнение нормали QiUi
Y(X) Y(Xi) - (X - Xi) tg VH. или
Y(X) Y(Xi) - (X - I sin at) tg #, (5) в этом уравнении Y(Xi) неизвестное.
Исходя из того, что () Ц| - общая точка для двух нормалей QiUi и ОиЦм, запишем уравнение этих нормалей, принимая в () Ц| X С и учитывая, что Xi I sin Xi 1 I sin СЬ-Y. Yi-i(C) Yi-i(Xi-i)-(C-lsinai-i)tg -u (6) Yi(C) Y(Xi) - (C -1 sin ai) tg ф:(7)
Yi-i(C) Yi(C).(8)
Приравняв согласно (8) уравнения (6) и (7), получаем уравнения для определения С: Yi-i(XM)-(C-lsin )tgi-i Y,(Xi)-(C-lslnai)tgr/: Yt-i(Xi-i) - С tg i-i + I sin ai-i tgf ,-i Yi(Xi) - С tgYv1-1 sin ajtg v,- Yi-i(Xi-i)-Y;(Xi) + sin ai-itg i-i- -Isin ct}tg #} С tgfi-i - С tg,- Yi-i(XM) - Yi(Ki) + I (sin ai-i, - -sin QJ tg) С (tgfl-i - tgf;). Отсюда
vi:.(yi..)-v;(Xiife(..,,.s,ny;i9y (9)Y(yi.,i4Efeiri l-.-tiV.,-s;«c ;-t 4 ii
C°t9Vi.,.,(J..-telЈТ5
Если в уравнении (9) вычислить после-ь,1 . т ц...
довательно все значения С в ряду К Ч.,-18«,- Цу-.-.-ЦУ;
0,1,2,3(1-1), I. то Ум(Хм) окажется изве-5 , Q -la-ib-smejjKijv;,
стным, причемза(И)-ю точку принимаем на-но ( - .:/,.
чало координат -(00. где Хи О, YI-I 0, ;
п ......t9V;-tglj; « :-(i:)-ctj(ec:..
VM-1 , а Yi(X,)- неизвестным.Учитывая, что tg tf 9
Вычислим координаты Xi, YI точки QI по10 xf + Я - р| ) - ctg ( as - to ),
известным координатам точки Ом. 2 М0жно записать
Поскольку по условию задачи требуетсяУ;., с-Ц (с,-u.).-,., УЗ
построить кривую, в каждой точке которой° ч ctg (;-ч.)- ctg ( 5
касательная была бы перпендикулярна нор-.ь,.
малям. и выходящую из начала координат0,15 ,-ч.)-еЦ(х;.,,)
это означает, что необходимо отыскать та-hV EfeinK; ct(.)-.,.,-(j;.,o
кое множество точек кривой, для которой СЦ (,-,-.)
две касательные, проведенные из соседних smwAc fc.-.}.
точек i-1 и I были бы одновременно перпен- J сЦ(-.-д.)
ДИКуЛЯрНЫ обОИМ (|-1}-Му И f-Му НОрМаЛЯМ,20 ctq...-.,)
т.е. кривая между точками 1-1 и 1 описывает-Уравнение (13) представлено в виде
ся уравнением окружности с радиусом R Yi(i(Z) Qz + Q (14)
Qi-iUi QiUi.В уравнении (11) вводим следующие обознаПоскольку длина R |Qi-iUil I QiUil, чения:
можно записать25 I (sin 05 - sin «i-j) д.
R2 - Ун(Хи) - Ym(C)2 +Y5M(Xi-i) - I2(sin «,- sin2 03-1) d. (15)
+(C -1 sin ОиГ YiOy - Y4i(C)r
(C-lslnG5), (10)Учитывая введенные обозначения, уравнегде УЦ|(С) Ui(C) - Yi(Xi) - (С -1 sin a) tg .ние (11) примет вид
В уравнении (10) неизвестным является30 X2 - 2Z (Qz + Q - 2(а - bz) (5 +
Yi(Xi)+2Ум(Хм) (Qz + Q d (16)
Об ознГч м Y,(X,j - Z, тогда из (10)™ г - 9 ы- Ь ь«Ъ-М Ъ
TYi i(Xi i) - YnifZ) + FCfZ) -4&X-(fi..la-d; /
-lsln, Z-Yl4,(Z)(Z)-lsln«,2.35 (-гв)(Н-я4У;.|(у,,н|г,
После разложения « ;.,(;.,).
Y2i-i(Xi-i) - 2 Yi-t(Xi-i) Yui(Z) +Поделим обе части уравнения (17) на 1-2 ft + Y2ui(Z) + C2(Z) - 2C(Z) I sin ori-1 +
sin2 ai-i - Z2 - 2Z YU,(Z) +z« .Sb-a«Vi-.ft8..Ve + gY..(x.-.t). py)
+Y24i(Z)+C2(Z)-2C(Z)lsln«| + l2sin2 (Ц40 , -ге , -e«
или Введем обозначения в уравнение (18)
ft-wuJf.. ,..
-Y2H(X,.,)-l2(Sln2«.s n2ai-,), (11) «
где из уравнения (9)45 Имеем
ZZ + 2AZ + B 0.(19)
(У;-«Ье(.-- -3 пК;- 9УИ-2 (12)
| ijvi-V-ta V; Решим уравнение (19)
Из соотношения (7)50 Ym(Z) - Z - (С (Z) -1 sin ai) tg $ . Получают квадратное уравнение (11) для определения Yi(Xi). Обозначим C(Z) а - bz,Итак, учитывая обозначения, введенные в тогдауравнении (18), получим YmCZ)-Z-(C(2)-lsln«) s Z-(a-bz-lslnai)tgVl z-atg гц-Х(-.К.- b
+b tg fy (Z + I sfn en tgiA Z + mZ +..,
(1+m)+Ji. (13)га-п ;..(У;-...(х;-. J20) где l 1-29 J Ш JОкончательные уравнения, характеризующие искомую кривую координатами Х| и YI текущей 1-й ее точки через координаты Xi-1- Yi-1 предыдущей (И)-й точки в прямоугольной системе координат, равны
, -2 ЗтУ;}
,G jfib-COiWe 7
(-29
(2.1)
где X - ось абсцисс, совпадающая с перпендикуляром, восстановленным из точки продольной оси цилиндра нагружения на расстоянии длины рычага от оси вала закручивания к точке контакта кулисы и рычага, и имеющая положительное направление в сторону поворота рычага на угол а по часовой стрелке;
Y - ось ординат, совпадающая с осью цилиндра нагружения и имеющая положительное направление в сторону от центра сращения рычага к оси абсцисс; б I ( - i);
ь - .L,
ctg (a - ip ) - ctg (a - -1 ) :
У,., ctfrfej-lM-S in ;;-, ctqlctj-.-ty,.,
с1з(к;-чМ- 9(к,-«-«1-Л
Л
f
-e.,-)
сЦ(«;-СГ,1
9 .,.
Y;vE 5;ntf;-ct -,-4,).,c;tj(t ;M-ipj.,y
.bctgK-r.-iJ d.vf|-e7(5in4 /;-5lnV,.lb
q.arcsim
Г (siYiK.-2)a
1tem J ;-2s 4itf,l%cos tf;(.1}2
При геометрической реализации кривой берут положительные значения Xj и YI из уравнения (21).
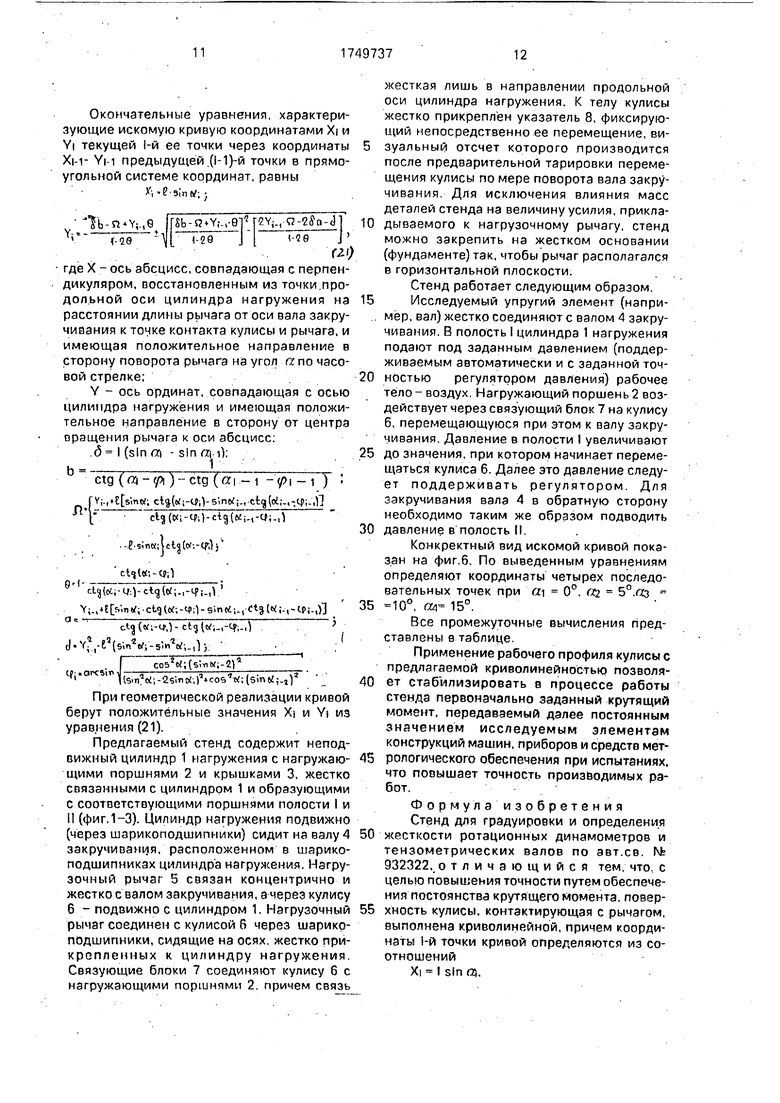
Предлагаемый стенд содержит неподвижный цилиндр 1 нагружения с нагружающими поршнями 2 и крышками 3, жестко связанными с цилиндром 1 и образующими с соответствующими поршнями полости I и II (фиг. 1-3). Цилиндр нагружения подвижно (через шарикоподшипники) сидит на валу 4 закручивания, расположенном в шарикоподшипниках цилиндра нагружения. Нагрузочный рычаг 5 связан концентрично и жестко с валом закручивания, а через кулису 6 - подвижно с цилиндром 1. Нагрузочный рычаг соединен с кулисой б через шарикоподшипники, сидящие на осях, жестко прикрепленных к цилиндру нагружения. Связующие блоки 7 соединяют кулису 6 с нагружающими поршнями 2, причем связь
жесткая лишь в направлении продольной оси цилиндра нагружения. К телу кулисы жестко прикреплен указатель 8, фиксирующий непосредственно ее перемещение, визуальный отсчет которого производится после предварительной тарировки перемещения кулисы по мере поворота вала закручивания. Для исключения влияния масс деталей стенда на величину усилия, прикла0 дываемого к нагрузочному рычагу, стенд можно закрепить на жестком основании (фундаменте) так. чтобы рычаг располагался в горизонтальной плоскости.
Стенд работает следующим образом.
5 Исследуемый упругий элемент (например, вал) жестко соединяют с валом 4 закручивания. В полость I цилиндра 1 нагружения подают под заданным давлением (поддерживаемым автоматически и с заданной точ0 ностью регулятором давления) рабочее тело - воздух. Нагружающий поршень 2 воздействует через связующий блок 7 на кулису 6, перемещающуюся при этом к валу закручивания. Давление в полости I увеличивают
5 до значения, при котором начинает перемещаться кулиса 6. Далее это давление следует поддерживать регулятором. Для закручивания вала 4 в обратную сторону необходимо таким же образом подводить
0 давление в полость II.
Конкректный вид искомой кривой показан на фиг.6. По выведенным уравнениям определяют координаты четырех последовательных точек при «1 0°. «2 5°.«з
5 10°, сиг 15°.
Все промежуточные вычисления представлены в таблице.
Применение рабочего профиля кулисы с предлагаемой криволинейностью позволя0 ет стабилизировать в процессе работы стенда первоначально заданный крутящий момент, передаваемый далее постоянным значением исследуемым элементам конструкций машин, приборов и средств мет5 рологического обеспечения при испытаниях, что повышает точность производимых работ.
Формула изобретения Стенд для градуировки и определения 0 жесткости ротационных динамометров и тензометрических валов по авт.св. № 932322, отличающийся тем, что с целью повышения точности путем обеспечения постоянства крутящего момента, повер- 5 хность кулисы, контактирующая с рычагом, выполнена криволинейной, причем координаты 1-й точки кривой определяются из соотношенийXi I sfn05.
&.b-ft+VH-9
}
где X - ось абсцисс совпадающая с перпендикуляром, восстановленным из Точки продольной оси цилиндра нагружения на расстоянии длины рычага от оси вала закручивания к точке контакта кулисы и рычага, и имеющая положительное направление в сторону поворота рычага на угол а по часовой стрелке;
Y - ось ординат, совпадающая с осью цилиндра нагружения и имеющая положительное направление в сторону от центра вращения рычага к оси абсцисс
d I (sin «|- sin ft, 1),
1
ctg ( сц - p) - ctg («, p -1)
Y. , ctflfo.-q.) siotf, , ctflfo,., MP .- l-clj..T)
-f BinefAcl tf.-Cf.)V, ,4-e sintt ci fai-cf.l-smcf... ctj(, , ,-01 ,.е(«,-ч.)(«Н-«..)
J-V.V ein s-sin,.,))
f. ---V,fl Г C08Vi(s. ntf..l)«
V(s.nz«,-25.nfc,)1Hcos7c 1(,-2l2
I - длина рычага
Фиг.1
Фиг.З
Фиг.2



| название | год | авторы | номер документа |
|---|---|---|---|
| Способ бесконтактного измерения диаметра отверстий | 1989 |
|
SU1728649A1 |
| Зубчатая муфта | 1986 |
|
SU1425374A1 |
| Способ бесцентрового шлифования тел вращения | 1988 |
|
SU1541022A1 |
| Способ контроля положения ковша экскаватора-драглайна | 1989 |
|
SU1795010A2 |
| Устройство для облова водных организмов | 1972 |
|
SU436648A1 |
| Цилиндрическая зубчатая передача | 1975 |
|
SU644986A1 |
| Способ определения пространственного положения буровых скважин | 1989 |
|
SU1640391A1 |
| Прибор для вычерчивания дуги каппы | 1989 |
|
SU1678646A1 |
| Зубчатый венец | 1987 |
|
SU1481524A1 |
| Вычислительное устройство для управления лучом фазированной антенной решетки | 1991 |
|
SU1829041A1 |

Изобретение относится к измерительной технике и может быть использовано для поверки средств измерения крутящего момента, определения жесткости валов общего назначения, а также в конструкциях по созданию и передаче крутящего момента при статическом характере его применения для стабилизации первоначально заданного его значения Цель изобретения - повышение точности. Стенд содержит кулису, поверхность которой, контактирующая с рычагом, выполнена с заданной криволи- нейностью, описываемой уравнением, что позволяет при движении кулисы добиться переменной поворачивающей рычаг силы, компенсирующей изменение крутящего момента, прикладываемого к рычагу, происходящее вследствие изменения угла между ними и продольной осью цилиндра нагруже- ния Композиция изменения крутящего момента, прикладываемого к рычагу, обеспечивает постоянство приложения момента при повороте рычага от 1-1 к 1-й точке, повышая точность работы стенда 6 ил , 1 та б л Ј о
Фиг. 4
| Стенд для градуировки и определения жесткости ротационных динамометров и тензометрических валов | 1980 |
|
SU932322A1 |
