(Л
С



| название | год | авторы | номер документа |
|---|---|---|---|
| Способ и устройство для нелинейного уплотнения навигационного сигнала ГЛОНАСС | 2018 |
|
RU2686660C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИН АКВАТОРИИ ГИДРОЛОКАТОРОМ БОКОВОГО ОБЗОРА И ГИДРОЛОКАТОР БОКОВОГО ОБЗОРА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2484499C1 |
| ИМИТАТОР НАВИГАЦИОННЫХ РАДИОСИГНАЛОВ | 2018 |
|
RU2697811C2 |
| ГИДРОАКУСТИЧЕСКАЯ СИСТЕМА ДЛЯ ВИЗУАЛИЗАЦИИ ПОДВОДНОГО ПРОСТРАНСТВА | 2011 |
|
RU2461845C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИНЫ ПОГРУЖЕНИЯ ОБЪЕКТА | 2012 |
|
RU2516602C1 |
| Способ определения фазового распределения нормальной составляющей колебательной скорости на элементах дискретных акустических антенн | 1986 |
|
SU1363092A1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2012 |
|
RU2514197C1 |
| АВТОМАТИЧЕСКАЯ НРЛС С УВЕЛИЧЕННЫМ НЕОБСЛУЖИВАЕМЫМ ПЕРИОДОМ АВТОНОМНОЙ РАБОТЫ | 2012 |
|
RU2522910C2 |
| Устройство для обработки данных при формировании диаграммы направленности антенной решетки | 1987 |
|
SU1462351A1 |
| Цифровой обнаружитель-измеритель частоты | 1989 |
|
SU1797127A1 |

Изобретение относится к вычислительной технике и может быть использовано в системах гидролокации с цифровым управлением при решении задач формирования, стабилизации и сканирования характеристик направленности, формируемых с помощью антенных решеток различных конструкций. Целью изобретения является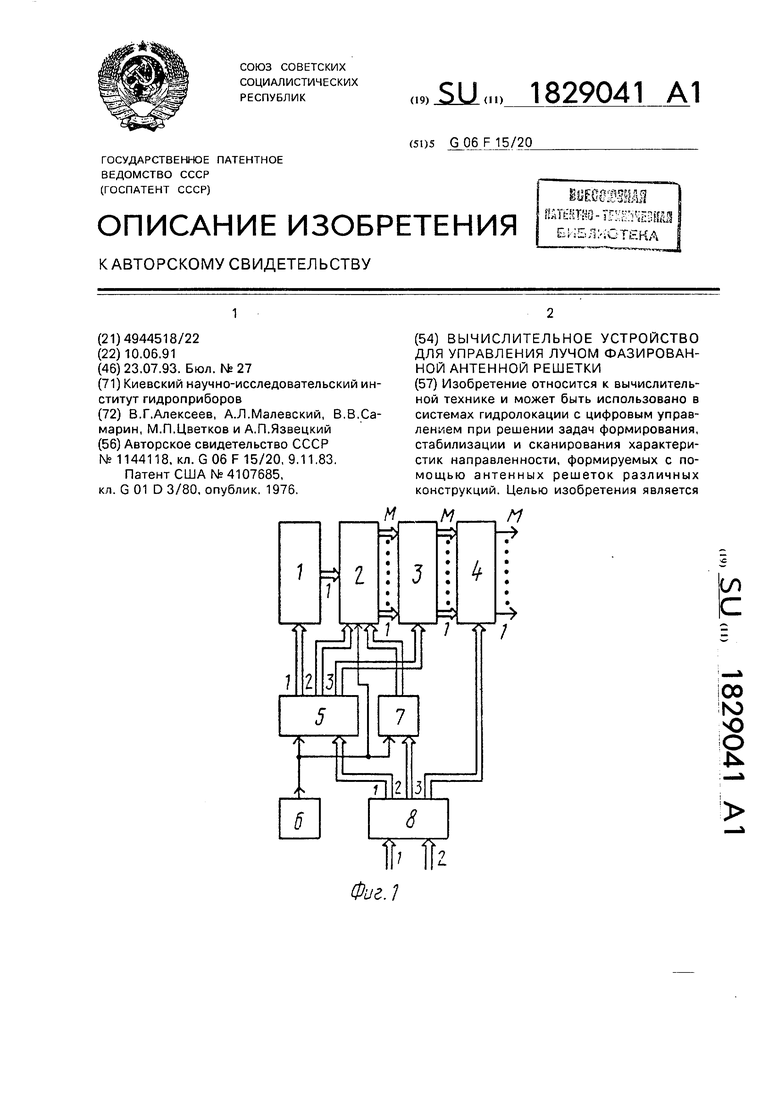
00
ю чэ
О
где
повышение точности формирования и управления положением в пространстве характеристик направленности формируемых антенными решетками, элементы излучения которой расположены на поверхности, отличной от плоскости. В вычислительном устройстве реализуется временной метод формирования характеристик направленности, при этом величины задержки излучаемого сигнала во времени для Rj-ro элемента антенной решетки опредеЛ|
ляется согласно выражению Т3 ---
( Xi sin q + YI cos q ) cos Ј + Zi sin E
v
p - расстояние от приведенной плоскости излучения, определяющее набег задержки во времени для RI-ГО элемента антенной решетки, подлежащего компенсации при формировании характеристики направленности в заданном направлении; v скорость распространения излучаемых колебаний в среде; Xj, Yi, Z - фактические координаты положения Rrro элемента антенной решетки с учетом результатов изготовления в антенной системе координат OXYZ (ось OZ - вертикальная, OY - продольная, ОХ - поперечная); q - курсовой угол оси характеристики направленности; е - угол места оси характеристики направленности; М-общее количество элементов антенной решетки; i 1М. Задержка Г3 сигналов возбуждеИзобретение относится к вычислительной технике и может быть использовано в системах гидроакустической локации с цифровым управлением при решении задач формирования, стабилизации и сканирования характеритсик направленности, формируемых с помощью антенных решеток различных конструкций.
В настоящее время как в радиолокации, так и в гидролокации широко применяются сложные сигналы с различными законами частотной модуляции, поскольку они позволяют определять характеристики облучаемых объектов с высокой точностью.
База сложного сигнала
D ДТТи 1,
0)
где Д f - девиация частоты; ти - длительность излучаемого сигнала, и, в частности, в гидролокации может достигать значений больше 1000.
ния в каждом канале излучения реализуется с помощью цифровых устройств регулируемой задержки. Поставленная цель достигается тем, что в устройство введены последовательно соединенные блок приема и хранения команд управления 3 и навигационных данных, дешифратор навигационных данных 5 и блок коррекции задержки 1, выход которого подключен к первому входу управления формирователя характеристик направленности 2, второй выход дешифратора навигационных данных 5 подключен к второму входу управления формирователя характеристик направленности 2, а третий выход - к входу управления коммутатора 3, выход синхронизации дешифратора навигационных данных 5 подключен к выходу генератора импульсов тактовой частоты 6, второй выход блока приема и хранения команд управления и навигационных данных подключен к входу управления формирователя сигналов возбуждения 7, а третий выход - к входу управления блока генераторов с внешним возбуждением 4, входы блока приема и хранения команд управления и навигационных данных 8 являются информационными входами устройства, первый - команд управления, второй - навигационных данных, выходы блока генераторов с внешним возбуждением - информационными выходами устройства. 6 ил.
Применение сложных сигналов предъявляет жесткие требования как к устройствам, формирующим эти сигналы в части обеспечения практической реализации
требуемых законов частотной модуляции с заданной точностью, так и к устройствам электронного формирования и сканирования диаграммы направленности (ДН) с целью обеспечения излучения в заданном
направлении сложных сигналов без искажения закона частотной модуляции.
Известны устройства, обеспечивающие решение второй задачи - электронного формирования характеристик направленности
(ХН) и управления их положением в пространстве в режиме излучения, в которых реализуется фазовый или временной методы формирования ХН.
При фазовом методе формирования ХН
имеется М (по числу излучающих элементов антенны) генераторов, работающих на одной и той же частоте, но с различными фазами выходного сигнала. Система электронного формирования и управления ХН должна обеспечивать заданное распределение фаз излучаемых сигналов соответствующее заданному направлению излучения, при этом набег фазы в излучаемых сигналах между двумя соседними элементами антенной решетки определяется согласно выражению
2лй
sin в,
(2)
где d - расстояние между двумя соседними элементами антенной решетки;
А- длина волны излучаемого сигна- ла;
в - угол, определяющий направление излучения (угол между линией фронта волны излучения и линией, соединяющей два соседних элемента антенной решетки).
Формирователи ХН, в которых реализуется фазовый метод, в общем случае содержат вычислитель полного набега фазы для каждого элемента антенной решетки, регистр для хранения полученных значений набегов фазы, цифровые управляемые фазовращатели по числу генераторов излучения и генератор импульсов тактовой частоты и блок управления, обеспечивающие синхронную работу формирователя ХН.
Назначением вычислительного устройства является определение для каждого элемента антенной решетки, участвующего в формировании ХН, сигналов управления фазовращателей с целью компенсации на- бега фазы, обеспечивая синфазное излучение колебаний этими элементами антенной решетки относительно приведенной плоскости излучения.
В частности, в вычислительном уст- ройстве, предназначенном для управления лучом плоской антенной решетки с электронным сканированием луча, фаза излучаемых сигналов, подаваемых на элементы антенной решетки, вычисляется по формуле
2ЯХ0
/ пЛ0 ,
$Pnxnv rix (-- -cose cos nj +
2 л Y + nv {--г-2-COSE sin
)
(3)
где Х0 - расстояние между элементами антенны по оси X;55
YO - расстояние между элементами антенны по оси Y;
пх - номер элемента антенны по оси X;
пу - номер элемнета антенны по оси Y;
5
0
5
0
5 0
5
0 5
0
5
Ј-угол места луча фазированной антенной решетки (ФАР);
т)- угол азимута луча ФАР.
В состав этого вычислительного устройства входят блок определения угла места, блок дешифрации азимута, блоки элементов запрета и регистры излучателей, а также шины связей соответственно выхода блока определения угла места с входами блоков элементов запрета, выхода блока дешифрации азимута с входами блоков элементов запрета, выходов блоков элементов запрета с входами регистров излучателей. Ифнорма- ционными выходами вычислительного устройства являются выходы регистров излучателей с выхода которых поступают сигналы управления фазовращателями каналов излучения. Входная информация поступает на вход блока определения угла места (информация о е и на вход блока дешифрации азимута (инфомрация о .
Основными недостатками устройств, в которых реализуется фазовый метод формирования ХН, является зависимость набега фазы от частоты излучаемого сигнала и их узкополосность, что ограничивает их применение при необходимости излучения сигналов в широком диапазоне частот, а особенно при излучении сигналов большой сложности с различными законами частотной модуляции из-за разрушения частотной структуры излучаемых колебаний, а следовательно, к снижению точности определения характеристик облучаемых объектов.
Кроме этих недостатков, как указывалось выше, формирование ДН с заданными характеристиками определяет жесткие требования к характеристикам отдельных составных частей формирователей ДН и, в частности, к погрешностям производственного разброса из характеристик, который конечен и может отразиться на точностных характеристиках формирователя ДН, а, следовательно, и локатора в целом.
В гидролокации, особенно при работе в нижней части звукового диапазона при выполнении условия d 0,5 -у- это расстояние
может измеряться метрами и при размещении элементов антенной решетки в корпусе судна приводит к существенной кривизне поверхности антенной решетки, что приводит к различным условиям прохождения колебаний от элементов антенны к приведенной плоскости излучения, поэтому с целью сохранения требуемой формы ДН этот фактор необходимо учитывать при практической реализации электронных устройств формирования ХН при излучении.
Приведенные выше устройства реализуются исходя из условия, что элементы антенной решетки располагаются по строкам и столбцам на эквидистантных расстояниях, для которых набег фазы от элемента к элементу изменяется по линейному закону, который практически реализуется применением счетчиков, умножителей или регистров сдвига, т.е. кривизна поверхностей расположения элементов антенной решетки в них не учитывается, поэтому применение их в рассматриваемом случае приводит к существенному ухудшению показателей ХН.
Временной метод формирования ХН предполагает наличие в каналах излучения устройств регулируемой задержки, с помощью которых формируются сигналы возбуждения генераторов каналов излучения с различной задержкой во времени. Система электронного формирования и управления ХН должна обеспечивать распределение сигналов возбуждения во времени соответствующее заданному направлению излучения, при этом набег временной задержки Аг излучаемых сигналов между двумя элементами антенной решетки определяется согласно выражению
Ar - -sln0, (4) v
где v - скорость распространения колебаний в среде, которая не зависит от частоты излучаемых сигналов.
Формирователи ХН, в которых реализуется временной метод, в общем случае содержит вычислитель полного набега временной задержки для каждого элемента антенной решетки, регистр для хранения полученных значений задержек, устройства управляемой задержки, а также генератор импульсов тактовой частоты и устройство управления, обеспечивающие синхронную работу формирователя ХН.
Назначением вычислителей этих формирователей ХН является определение для каждого элемента анетнной решетки, участвующего в формировании ХН, сигналов управления устройствами управляемой задержки с целью компенсации набега задержки во времени, обеспечивая синфазное излучение колебаний этими элементами антенной решетки относительно приведенной плоскости излучения. Основу этих формирователей ХН составляют устройства управляемой задержки, что и определяет их широкополосность, обеспечивающую излучение сложныхсигналов с различными законами частотной модуляции без перестройки в широком диапазоне частот.
Наиболее близким техническим решением к предполагаемому изобретению является формирователь характеристик направленности в режиме излучения сис- темы формирования диаграммы направленности, содержащий последовательно соединенные генератор сигналов излучения, умножитель, селекторный переключатель, блок генераторов с внешним
возбуждением, состоящий из М идентичных каналов, каждый из которых состоит из последовательно включенных ЦАП, полосового фильтра и усилителя мощности, адресный генератор, первый выход которого подключен к входу управления ЗУ, второй выход - к входу управления умножителя, третий выход - к входу управления селекторного переключателя, генератор импульсов тактовой частоты, выход которого подключен к входам синхронизации генератора сигналов излучения, АЦП и адресного генератора.
Недостатком данной системы формирования ДН, а также и остальных формирователей ХН рассмотренных выше, является отсутствие возможности учета отклонений фактического положения излучающих элементов антенной решетки на объекте от теоретического, принятого при выборе
конструкции антенной решетки, что может привести к существенному ухудшению как показателей формируемых ХН, так и точности задания требуемого направления излучения
Целью изобретения является повышение точности формирования ХН и управления положением ее в пространстве за счет учета фактического расположения излучающих элементов антенной решетки по
отношению к приведенной плоскости излучения.
Обычно антенная решетка представляет собой жесткую конструкцию с известным расположением в ней излучающих элементов, поэтому имеется возможность заранее рассчитать отличный от линейного закон изменения Т3 RI для каждого RI-ГО элемента антенной решетки, участвующего в формировании ХН с учетом ее сканирования в заданном секторе пространства при известных курсовом углед и угле места Ј оси ХН, т.е. определить зависимость
55
r3Rj p(q, Ј),
(3)
где Rj(Xi, Yi, Zi) - положение Rrro элемента антенной решетки с координатами Xi, Yj, Zi соответственно по осям OX, OY и OZ в антенной системе координат.
В антенной системе координат OZ -В В
вертикальная ось, OY - продольная ось,cosq Q , Sjn у V д2 + В2 + С2
причем плоскость Z OY совпадает с диамет- или
ральной плоскостью антенны, ZOX - попе-аВ,ал
,..., cost - cos о sin v. (8)
речная ось, плоскость ZOX - поперечная.5 VA2 + В2 + С2
Требуемое направление излучения задается вектором N с координатами А, В и. АА
С в декартовых координатах или углом ме-sm4 О N sin у + В2
ста Ј курсовым углом q в полярных коорди- или
ната кТ1° cosa siny. (9)
Вектор N перпендикулярен приведен-V д2 + В2 + С2
ной плоскости излучения, для которой общее уравнениеПодставляя (8) и (8) в (7), получили
Ах+ Bv + Cz + D 0,(4) 15 5i Xi sin q + siny + YI cosq siny +
+ Zicosy-p.(10)
или нормальное уравнение
При условии выбора расстояния р
X cos a+ Y COS/3 + Zcosy- р 0, (5)таким образом, что все излучающие
20 элементы антенной решетки, участвуюили уравнение в отрезкахщие в формировании ХН, расположены
с обратной стороны приведенной пло- X , Y , Z 1х-чскости излучения на расстоянии di р
а Ь
25 от нее (гэмакс ) расстояние определяюв уравнениях (5), (6)щее компенсацию набега задержки во времени для Rrro элемента антенной решетки
cos а -А -;бУДет Равно:
V А2 + В2 + С2
30 fn Xi sin q + sin y+ YI cosq sin y +
r. , B;+Zicosy-p(11)
V A2 + В2 + С2с Учетом E 90 У
cosy Сpi Xi sin q cos Ј+Yi cosq cos Ј +
VA2+B2 + C235 +ZisinЈ.(12)
p - расстояние плоскости от начала коорди-в частности, при угле места р О
нат;
а, Ь, с - отрезки, отсекаемые плоско- YI cos Ј + Zj sin Ј,
стью на осях координат,40
Нормальное уравнение (5) получается При курсовом угле q О из общего уравнения (4) умножением на нормирующий множитель/и Yi cos Ј + Zi sin Ј.
45Задержка излучающего сигнала во вреv А + В2 + С2мени Rj-ro элемента антенны
т - Pi
при этом знак,ы обратен знаку D.Тз -
Расстояние д от приведенной плоско- ( Xi sin q + Y, cos q ) cos Ј + Zi sin Ј
сти излучения до излучающего элемента
Ri (Xi, Yi, Zi) определяется путем подста-(13)
новки координат этого элемента в урав-в соответствии с выражением (13) для
нение(5).каждого Rrro излучающего элемента
рассчитываются Т3 для заданных значений
di XiCosa+Yicos/3+Zicosy-p. (7) 55угла места Ј и курсового угла q КОТОрые
являются основой для программирования
В антенной системе координат корек- постоянного программируемого запомина- ция вектора направления N на плоскость ющего устройства (ППЗУ) блока коррекции XOY равна ON изадержки.
Рассчитанные в соответствии с выражением (13) значения Тз и, в частности, для крупногабаритных антенных решеток гидролокаторов с существенным отклонением поверхности расположения излучающих элементов антенной решетки от плоскости и хранящиеся в ППЗУ блока коррекции задержки используются в процессе работы электронных систем формирования и управления ХН, при этом существенно улучшается форма ХН и повышается точность управления положением ХН в пространстве. Так, например, при частоте излучаемых сигналов 1500 Гц и скорости распространения колебаний в среде 1500 м/с, длина волтООны тоуг 1 м т-е расхождение в
расстоянии до приведенной плоскости в 0,5 м, приводит к противофазному излучению сигналов от данного элемента антенной решетки, что при расположении элементов антенной решетки в поверхности борта судна, вполне реально, а следовательно, коррекция набега фазы необходима.
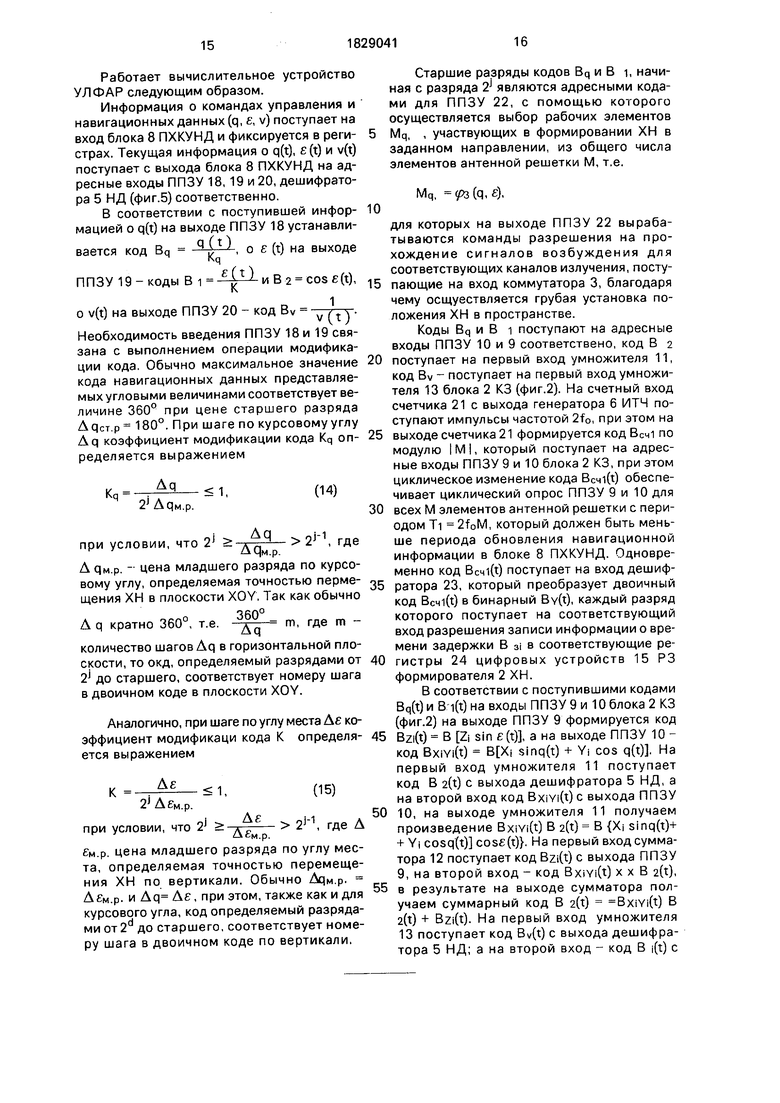
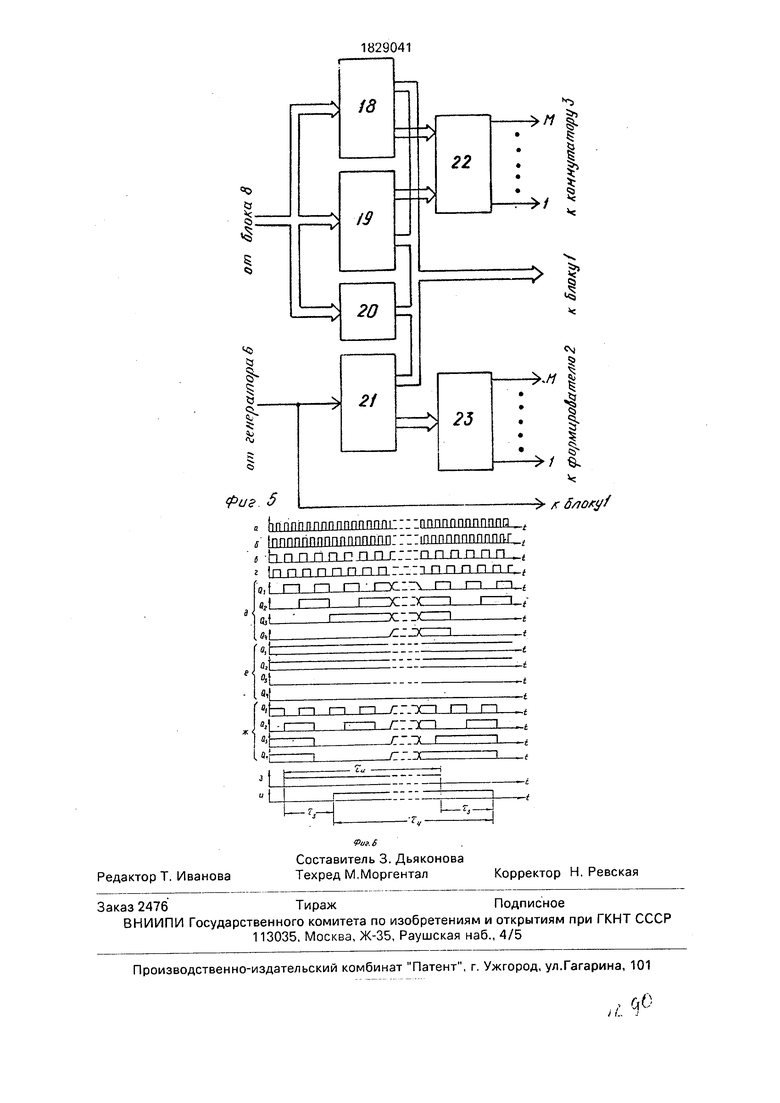
На фиг.1 изображена структурная электрическая схема вычислительного устройства для управления лучом фазированной антенной решетки; на фиг.2 - функциональная электрическая схема блока коррекции задежки; на фиг.З - функциональная электрическая схема формирователя характеристик направленности; на фиг.4 - функциональная электрическая схема блока генераторов с внешним возбуждением; на фиг.5 - функциональная электрическая схема дешифратора навигационных данных; на фиг.6 - временные диаграммы работы цифрового устройства регулируемой задержки.
На фиг.1 представлена структурная электрическая схема заявляемого вычислительного устройства для управления лучом фазированной антенной решетки, которое содержит блок 1 коррекции задержки (КЗ), формирователь 2 характеристик направленности (ХН), коммутатор 3, блок 4 генераторов с внешним возбуждением (ГВВ), дешифратор 5 навигационных данных (НД), генератор 6 импульсов тактовой частоты (ИТЧ), формирователь 7 сигналов возбуждения (СВ), блок 8 приема и хранения команд управления и навигационных данных (ПХКУНД).
Блок 1 КЗ (фиг.2) содержит постоянное программное запоминающее устройство (ППЗУ) 9, ППЗУ 10, умножитель 11, сумматор 12, умножитель 13 и схему управления 14.
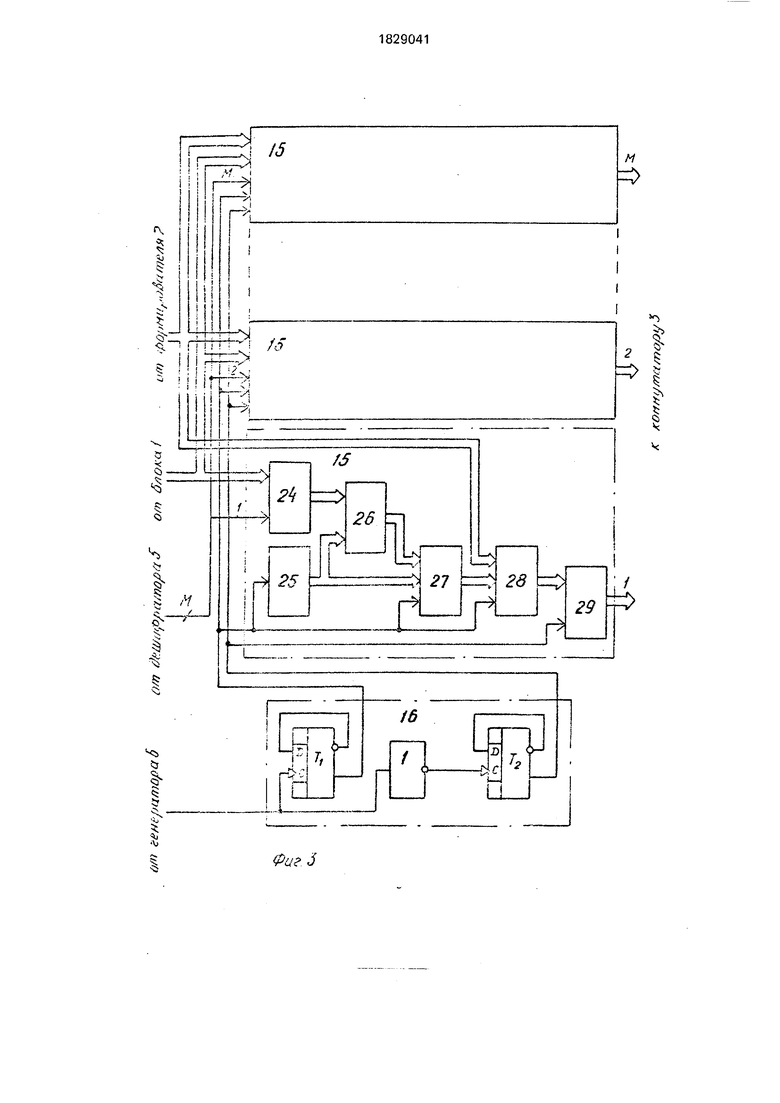
Формирователь 2 ХН (фиг.З) содержит М цифровых устройств 15 регулируемой задержки (РЗ) и схему управления 16.
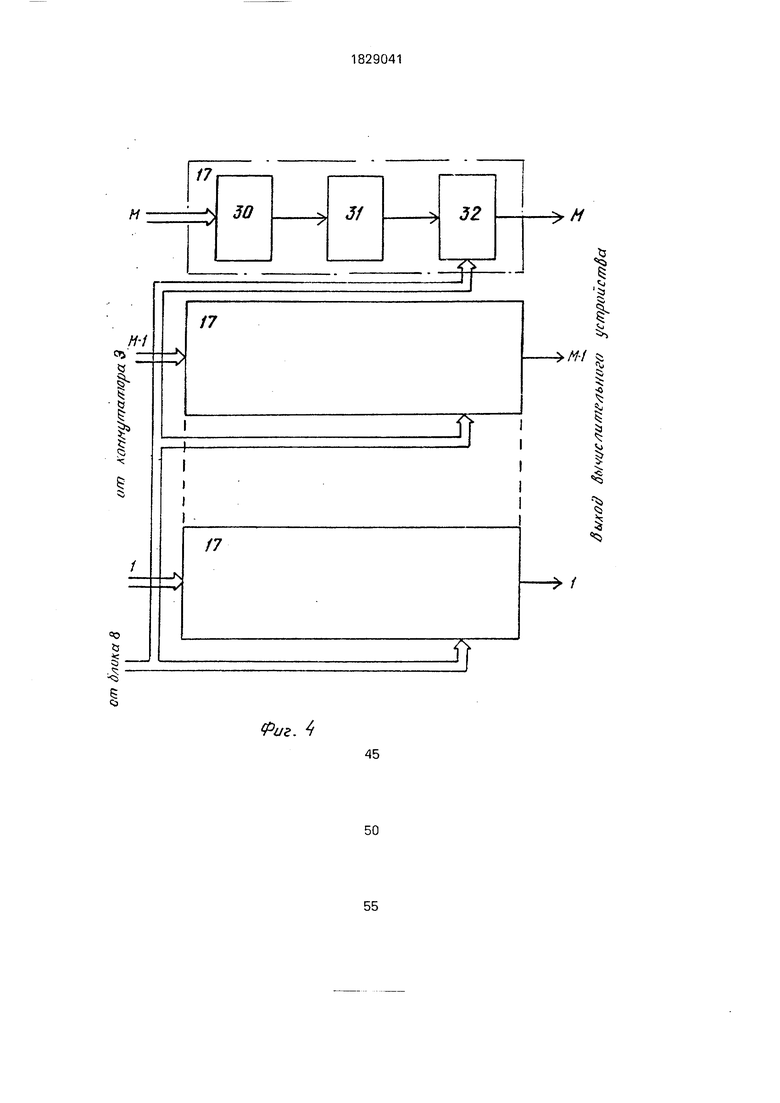
Блок 4 ГВВ (фиг.4) содержит М генераторов 17 с внешним возбуждением (ВВ).
Дешифратор 5 НД содержит (фиг.5) ППЗУ 18, ППЗУ 19, ППЗУ 20, счетчик 21, ППЗУ 22 и дешифратор 23.
Цифровое устройство 15 РЗ (фиг.З) содержит регистр 24, счетчик 25, сумматор 26, коммутатор 27, оперативное запоминающее устройство (ОЗУ) 28 и регистр 29. 0Генератор 17 ВВ (фиг.4) содержит ЦАП
30, полосовой фильтр (ПФ)31 и усилитель 32 с регулятором мощности.
Блок 8 ПХКУНД, формирователь 7 СВ, формирователь 2 ХН, коммутатор 3, и блок 5 4 ГВВ включены последовательно, выход генератора 6 ИТЧ подключен к входам синхронизации дешифратора 5 НД, формирователя 2 ХН и формирователя 7 СВ. Первый выход дешифратора 5 НД подключен к вхо- 0 ду управления блока 1 КЗ, второй выход- к входу управления формирователя 2 ХН, тер- тий выход- к входу управления коммутатора 3.
Первый выход блока 8 ПХКУНД подклю- 5 чен к информационному входу дешифратора 5 НД, третий выход - к входу управления блока 4 ГВВ. Информационными входами вычислительного устройства являются входы блока 8 ПХКУНД, информационными вы- 0 ходами - выходы блока 4 ГВВ.
Блок 1 КЗ (фиг.2) предназначен для вычисления кодов задержек для каждого элемента RI антенной решетки в соответствии с выражением (13).
5В ППЗУ 9 защиты значения/oxj YJ i(q)
Xi sinq + Yi cosq,
В ППЗУ 10-значенияpz - pi(e) ,
в умножителе 11 реализуется операция (Xi sinq + YI cosq) cos Ј,
в сумматоре 12 - операция (Xi sinq + Yi x cosq) cos Ј + Zi sin e,
в умножителе 13 - операция ( Xj sin q + YI cos q ) cos Ј + Z sin Ј
5V
ППЗУ 9 и ППЗУ 10 реализуются на ППЗУ типа Р556РТ5 умножители 11 и 13 - на умножителях типа 1802ВР2 сумматор 12 реализуется по схеме n-разрядного сумматора. Схема управления 14 предназначена для реализации последовательного выполнения операций в блоке 1 и представляет собой трехфазный формирователь тактовых импульсов со сдвигом по фазе 120°, реализуется на счетчик-дешифраторе и RS-тригге- рах (см. фиг.2).
Формирователь 2 ХН (фиг.З) предназначен для распределения сигналов возбуждения по каналам излучения со сдвигом по
0
5
времени в соответствии с значениями Т3, поступившими на его вход из блока 1 КЗ, которая осуществляется автономно для каждого элемента RI антенной решетки цифровым устройством 15 РЗ данного канала излучения. Входящие в состав цифрового устройства 15 РЗ регистр 24 предназначен для хранения кодов задержки, счетчик 25 - для формирования адреса записи информации в ОЗУ 28 - (мгновенных значений сигналов возбуждения, поступающих на вход формирователя 2 ХН с выхода формирователя 7 СВ), сумматор 26-для формирования адреса считывания информации из ОЗУ 28, коммутатор 27 - для переключения режима работы (запись-считывание) ОЗУ 28, регистр 29 - для промежуточного хранения и подачи на вход коммутатора 3 сигнала возбуждения с задержкой по времени.
Регистры 24 (Q - разрядный) и 29 (п - разрядный) реализуются как набор из D- триггеров, счетчик 25 (двоичный Q - разрядный) реализуется по схеме синхронного счетчика с последовательным переносом, работающим в режиме прямого счета, сумматор 26 - по схеме двоичного 0-разрядного сумматора, коммутатор 27 - по схеме мультиплексора 2 1 на Q разрядов, ОЗУ - 28 статическое емкостью N слов х п разрядов.
Работа цифровых устройств 15 РЗ в составе формирователя 2 ХН осуществляется схемой управления 16, вариант схемной реализации которой приведен на фиг.З.
Коммутатор 3 предназначен для включения рабочих каналов излучения из общего количества М в соответствии с командами, поступающими из дешифратора 5 НД. Коммутатор 3 реализуется как набор из М ключей на схемах И.
Блок 4 ГВВ (фиг.4) предназначен для восстановления сигналов возбуждения по цифровым выборкам мгновенных значений, а поступающих с выхода формирователя 2 ХН через коммутатор 3 и усиления их до мощности, необходимой для излучения, при которой обеспечивается необходимая дальность обзора. Восстановление сигнала осуществляется ЦАП 30 с последующей фильтрацией полосовыми фильтрами 31, а усиление - усилителями 32, Генераторы с внешним возбуждением 17 реализуются так:
дополнительно в усилители 32 введена регулировка мощности, управление которой осуществляется командами, которые поступают из блока 8 ПХКУНД.
Дешифратор 5 НД (фиг.5) предназначен для формирования сигналов управления
блоком 1 КЗ, формирователем 2 ХН и коммутатором 3 в соответствии с поступившей на его вход информацией с навигационных данных (q, Ј, v) из блока 8 ПХКУНД. В ППЗУ 18 защиты значения кодов
Bq -$-, в ППЗУ 19 - значение кодов В
1
Kq
е ТГ
и В 2 cos e, где коэффициенты
пересчета Kq и К, определяются из условия заданных шага по курсовому углу Др и шага по углу места ДБ, определяющих элементы антенной решетки, участвующие в формировании ХН в заданном направлении.
В ППЗУ 20 защиты значения кодов -.
Счетчик 21 предназначен для организации синхронной работы по считыванию информации из ППЗУ 9 и 10 блока 1 КЗ и записи информации с выхода блока 1 КЗ в регистры 24 цифровых устройств 15 РЗ формирователя 2 ХН.
В ППЗУ 22 защита маска Mq,. (q, Ј),
где Mq, - элементы антенной решетки, участвующие в формировании ХН в заданном направлении из общего количества М элементов антенной решетки. Дешифратор 23 предназначен для последовательного формирования М импульсов разрешения записи в регистры 24 формирователя 2 ХН кодов т3.
ППЗУ 18, 19, 20 и 22 реализуются аналогично ППЗУ 9 и 10, счетчик 21 по модулю
|М| реализуется аналогично счетчику 25, дешифратор 23 на М выходов, реализуется как преобразователь двоичного кода в бинарный.
Генератор 6 ИТЧ предназначен для
формирования импульсов стабильных по частоте следования, определяющих синхронную работу всего вычислительного устройства управления лучом фазированной антенной решетки (УЛФАР), реализуется по схеме автогенератора с применением кварца для стабилизации частоты.
Формирователь 7 СВ предназначен для формирования сигналов возбуждения, параметры которых (частота, закон частотной
модуляции, длительность и др.), определяются командами, поступающими с выхода блока 7 ПХКУНД.
Блок 8 ПХКУНД предназначен для приема и хранения входной информации (команда управления и навигационных данных) определяющих режим работы вычислительного устройства УЛФАР, в его состав входят регистры, реализуемые аналогично регистрм 24 и 29.
Ј (t) на выходе
Работает вычислительное устройство УЛФАР следующим образом.
Информация о командах управления и навигационных данных (q, Ј, v) поступает на вход блока 8 ПХКУНД и фиксируется в регистрах. Текущая информация о q(t), Ј (t) и v(t) поступает с выхода блока 8 ПХКУНД на адресные входы ППЗУ 18, 19 и 20, дешифратора 5 НД (фиг.5) соответственно.
В соответствии с поступившей информацией о q(t) на выходе ППЗУ 18 устанавливается код Вч -3-р-
1Чс
ППЗУ 19-коды В 1
о v(t) на выходе ППЗУ 20 - код Bv
Необходимость введения ППЗУ 18 и 19 связана с выполнением операции модификации кода. Обычно максимальное значение кода навигационных данных представляемых угловыми величинами соответствует величине 360° при цене старшего разряда Aqcr.p 180°. При шаге по курсовому углу Aq коэффициент модификации кода Kq on- ределяется выражением
Aq
2J AqM.P.
:Ј 1,
(14)
при условии, что 2J л , где
ЈАЦм.р.
A qM.p. - цена младшего разряда по курсовому углу, определяемая точностью перме- щения ХН в плоскости XOY. Так как обычно
360° A q кратно 360°, т.е. д - т, где т количество шагов Aq в горизонтальной плоскости, то окд, определяемый разрядами от 2j до старшего, соответствует номеру шага в двоичном коде в плоскости XOY.
Аналогично, при шаге по углу места АЈ коэффициент модификаци кода К определя- ется выражением
К АЈ
1,
2jAЈM.P. при условии, что 2J
Јм.р. цена младшего разряда по углу места, определяемая точностью перемещения ХН по вертикали. Обычно AqM.p. АЈМ.Р. и Aq AЈ, при этом, также как и для курсового угла, код определяемый разрядами от 2d до старшего, соответствует номеру шага в двоичном коде по вертикали.
0 5
10
5
0
с
0
5
0
5
Старшие разряды кодов Bq и В 1, начиная с разряда 2 являются адресными кодами для ППЗУ 22, с помощью которого осуществляется выбор рабочих элементов Mq, , участвующих в формировании ХН в заданном направлении, из общего числа элементов антенной решетки М, т.е.
Mq, (рз (q, Ј),
для которых на выходе ППЗУ 22 вырабатываются команды разрешения на прохождение сигналов возбуждения для соответствующих каналов излучения, поступающие на вход коммутатора 3, благодаря чему осщуествляется грубая установка положения ХН в пространстве.
Коды Bq и В 1 поступают на адресные входы ППЗУ 10 и 9 соответствено, код В 2 поступает на первый вход умножителя 11, код By - поступает на первый вход умножителя 13 блока 2 КЗ (фиг.2). На счетный вход счетчика 21 с выхода генератора 6 ИТЧ поступают импульсы частотой 2f0, при этом на выходе счетчика 21 формируется код ВСч1 по модулю |М|, который поступает на адресные входы ППЗУ 9 и 10 блока 2 КЗ, при этом циклическое изменение кода BC4i(t) обеспечивает циклический опрос ППЗУ 9 и 10 для всех М элементов антенной решетки с периодом Ti 2f0M, который должен быть меньше периода обновления навигационной информации в блоке 8 ПХКУНД. Одновременно код BC4i(t) поступает на вход дешифратора 23, который преобразует двоичный код BC4i(t) в бинарный Bv(t), каждый разряд которого поступает на соответствующий вход разрешения записи информации о времени задержки В 3i в соответствующие регистры 24 цифровых устройств 15 РЗ формирователя 2 ХН.
В соответствии с поступившими кодами Bq(t) и B-|(t) на входы ППЗУ 9 и 10 блока 2 КЗ (фиг.2) на выходе ППЗУ 9 формируется код Bzi(t) В Zi sin Ј (t), а на выходе ППЗУ 10 - код BxiYi(t) sinq(t) + Yj cos q(t). Ha первый вход умножителя 11 поступает код В 2(t) с выхода дешифратора 5 НД, а на второй вход код BxiYi(t) с выхода ППЗУ 10, на выходе умножителя 11 получаем произведение BxiVi(t) В 2(t) В {Xi sinq(t)+ + YJ cosq(t) cosЈ(t)}. На первый вход сумматора 12 поступает код Bzi(t) с выхода ППЗУ 9, на второй вход - код Bxw(t) x x В 2(t), в результате на выходе сумматора получаем суммарный код В 2(t) BxiYi(t) В 2(t) + Bzi(t). На первый вход умножителя 13 поступает код Bv(t) с выхода дешифратора 5 НД; а на второй вход - код В i(t) с
выхода сумматора 12, в результате умножения которых получаем последовательно коды:
В 3l(t) - В i(t) Bv(t) - „ Х| sin q (V) cos q (t)OQ6g (t) +Zsin fi(t)
-вщдля всех элементов антенной решетки в соответствии с выражением (13). Последовательная работа умножителя 11, сумматора 12 и умножителя 13 организуется схемой управления 14.
Коды В 3i(t) с выхода блока 1 КЗ поступают на информационные входы регистров 24 цифровых устройств 15 РЗ формирователя 2 ХН (фиг.З) и последовательно, по мере поступления на вход разрешения записи регистра 24 i-ro импульса с выхода дешифратора 23 дешифратора 5 НД синхронно с кодом В 3i(t), обеспечивается регистрация этого кода в регистре 24 i-ro цифрового устройства 15 РЗ формирователя 2 ХН. Все цифровые устройства 15 РЗ идентичны, на фиг.З приведена функциональная электрическая схема этого устройства для первого канала.
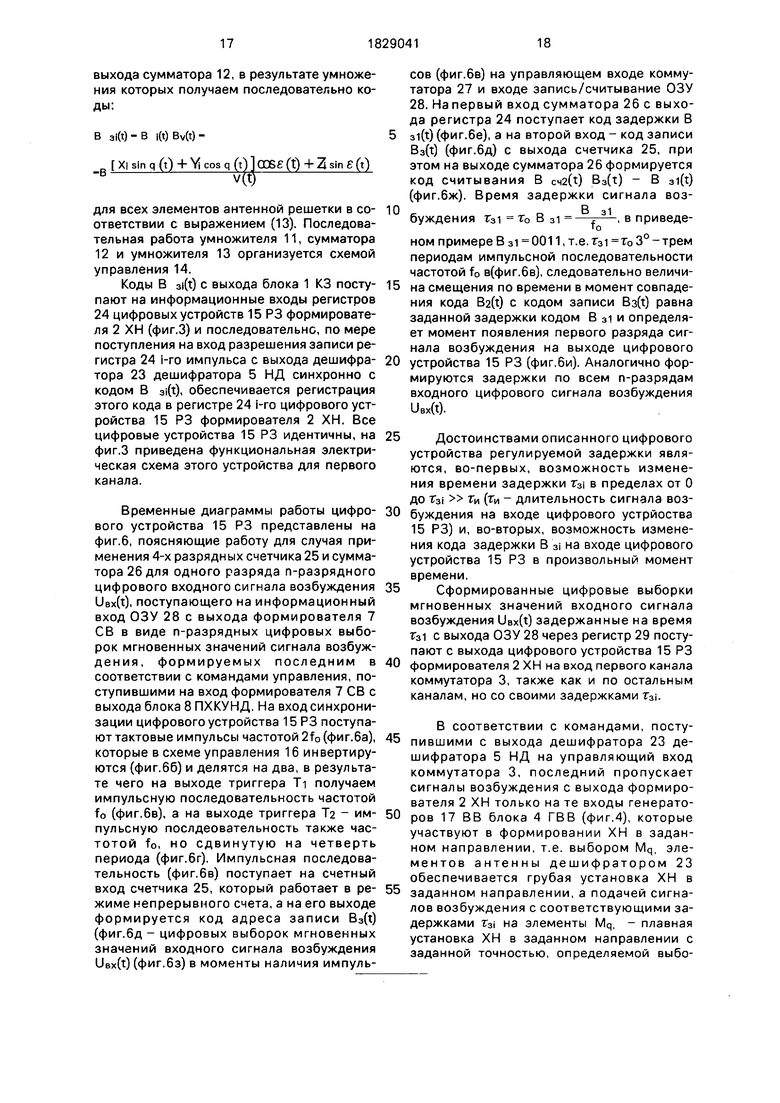
Временные диаграммы работы цифрового устройства 15 РЗ представлены на фиг.6, поясняющие работу для случая применения 4-х разрядных счетчика 25 и сумматора 26 для одного разряда п-разрядного цифрового входного сигнала возбуждения Uex(t), поступающего на информационный вход ОЗУ 28 с выхода формирователя 7 СВ в виде n-разрядных цифровых выборок мгновенных значений сигнала возбуждения, формируемых последним в соответствии с командами управления, поступившими на вход формирователя 7 СВ с выхода блока 8 ПХКУНД. На вход синхронизации цифрового устройства 15 РЗ поступают тактовые импульсы частотой 2f0 (фиг.ба), которые в схеме управления 16 инвертируются (фиг.бб) и делятся на два, в результате чего на выходе триггера Ti получаем импульсную последовательность частотой fo (фиг.бв), а на выходе триггера Та - импульсную послдеовательность также частотой f0, но сдвинутую на четверть периода (фиг.бг). Импульсная последовательность (фиг.бв) поступает на счетный вход счетчика 25, который работает в режиме непрерывного счета, а на его выходе формируется код адреса записи B3(t) (фиг.бд - цифровых выборок мгновенных значений входного сигнала возбуждения Uex(t) (фиг.бз) в моменты наличия импульсов (фиг.бв) на управляющем входе коммутатора 27 и входе запись/считывание ОЗУ 28. На первый вход сумматора 26с выхода регистра 24 поступает код задержки В 3i(t) (фиг.бе), а на второй вход - код записи B3(t) (фиг.бд) с выхода счетчика 25, при этом на выходе сумматора 26 формируется код считывания В Сч2(т.) B3(t) - В 3i(t) (фиг.бж). Время задержки сигнала возбуждения т31 TO В з1 . в приведете
ном примере В 31 0011, т.е. т31 гъ 3° - трем периодам импульсной последовательности частотой f0 в(фиг.бв), следовательно величи5 на смещения по времени в момент совпадения кода B2(t) с кодом записи Вз(т) равна заданной задержки кодом В 31 и определяет момент появления первого разряда сигнала возбуждения на выходе цифрового
0 устройства 15 РЗ (фиг.би). Аналогично формируются задержки по всем п-разрядам входного цифрового сигнала возбуждения UBx(t).
5 Достоинствами описанного цифрового устройства регулируемой задержки являются, во-первых, возможность изменения времени задержки Т3 в пределах от О до T3i Ти (ти - длительность сигнала воз0 буждения на входе цифрового устрйоства 15 РЗ) и, во-вторых, возможность изменения кода задержки В 3i на входе цифрового устройства 15 РЗ в произвольный момент времени.
5 Сформированные цифровые выборки мгновенных значений входного сигнала возбуждения UBx(t) задержанные на время Т31 с выхода ОЗУ 28 через регистр 29 поступают с выхода цифрового устройства 15 РЗ
0 формирователя 2 ХН на вход первого канала коммутатора 3, также как и по остальным каналам, но со своими задержками т3.
В соответствии с командами, посту- 5 пившими с выхода дешифратора 23 дешифратора 5 НД на управляющий вход коммутатора 3, последний пропускает сигналы возбуждения с выхода формирователя 2 ХН только на те входы генерато- 0 ров 17 ВВ блока 4 ГВВ (фиг.4), которые участвуют в формировании ХН в заданном направлении, т.е. выбором Mq, элементов антенны дешифратором 23 обеспечивается грубая установка ХН в
5
заданном направлении, а подачей сигналов возбуждения с соответствующими задержками т3 на элементы Mq, - плавная установка ХН в заданном направлении с заданной точностью, определяемой выбором цены младшего разряда кода задержки В з и частотой to синхронизирующих импульсов.
В блоке 4 ГВВ цифровые выборки мгновенных значений с помощью ЦАП 30 и ПФ 31 преобразуются, из цифровой формы в аналоговую и усиливаются по мощности усилителем 32 до мощности, определяемой командой, поступившей на управляющий вход усилителя 32 из блока 8 ПХКУНД.
Введение в вычислительное устройство УЛФАР блока приема и хранения команд управления и навигационных данных, дешифратора навигационных данных и блока коррекции задержки, при наличии вышеуказанных ев ей, обеспечивает учет фактического расположения излучающих элементов антенной решетки по отношению к приведенной плоскости излучения как для плоских крупогабаритных антенных решеток с целью повышения точности формирования показателей ХН и управления ее положением в пространстве путем коррекции электронным методом технологических отклонений в расположении элементов антенной решетки гидролокатора от расчетных, так и для антенных решеток других конструкций (кольцевых, цилиндрических, сферических).
Формула изобретения Вычислительное устройство для управления лучом фазированной антенной решетки, содержащее последовательно соединенные формирователь сигналов возбуждения и связанные поканально формирователь характеристик направленности, коммутатор и блок генераторов с внешним возбуждением, выходы которого являются
информационными выходами устройства, генератор импульсов тактовой частоты, выход которого подключен к входам синхрони- зации формирователя характеристик
направленности и формирователя сигналов возбуждения, отличающееся тем, что, с целью повышения точности формирования и управления положением в пространстве характеристик направленности,
0 формируемых антенными решетками, элементы излучения которых расположены на поверхности, отличной от плоскости, введены последовательно соединенные блок приема и хранения команд управления и
5 навигационных данных, блок приема и хранения команд управления и навигационных данных, дешифратор навигационных данных и блок коррекции задержки, выход которого подключен к первому входу
0 управления формирователя характеристик направленности, второй выход дешифратора навигационных данных подключен к второму входу управления формирователя характеристик направленности, а третий
5 выход - к входу управления коммутатора, вход синхронизации дешифратора навигационных данных подключен к выходу генератора импульсов тактовой частоты, второй выход блока приема и хранения
0 команд управления и навигационных данных подключен к входу управления формирователя сигналов возбуждения, а третий выход - к входу управления блока генераторов с внешним возбуждением, входы блока приема и хранения команд управления и навигационных данных являются информационными входами устройства: первый - команд управления, второй - навигационных данных.
Фиг. 2
ЈH
ffic/oujvu/fiuuox у
ft
см
о от см
со
Ј куэшнрс - пи /оФ wnfwot/ff шо pv(/ou;n /d /-r/j73ff шод о(/оил)г/-1Н9г wv
ел ел
ел о
. ел
дых off Зычислите/гьнога устройства
I
1
Ч&
I I
Г
fc
e hririnnnnnnnnnnnnnr -nnnnnnnnnnnn t
S 1ПППРПППППППППППП1ППППППППППП.Г j l НППППРПП П П П П П t г 1ПППППППП - П П П П П Г, аЛ ГЛ 1-1 (- Г
n3 fХ-- I.t
Jt/1- 3
«,t
s
I
ч
Nl
f
/
k 5/)
| Устройство для управления лучом антенной решетки | 1983 |
|
SU1144118A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Патент США № 4107685, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Планшайба для точной расточки лекал и выработок | 1922 |
|
SU1976A1 |
