Изобретение относится к автоматическому измерению эксплуатационных параметров экскаватора-драглайна при выполнении вскрышных бестранспортных работ, в частности, предназначается для контроля положения ковша в пространстве и является усовершенствованием известного способа контроля положения ковша экскаватора-драглайна по авт. св. NS 1578281.
Целью изобретения является упрощение реализации способа при одновременном повышении точности определения координат кромки зубьев ковша.
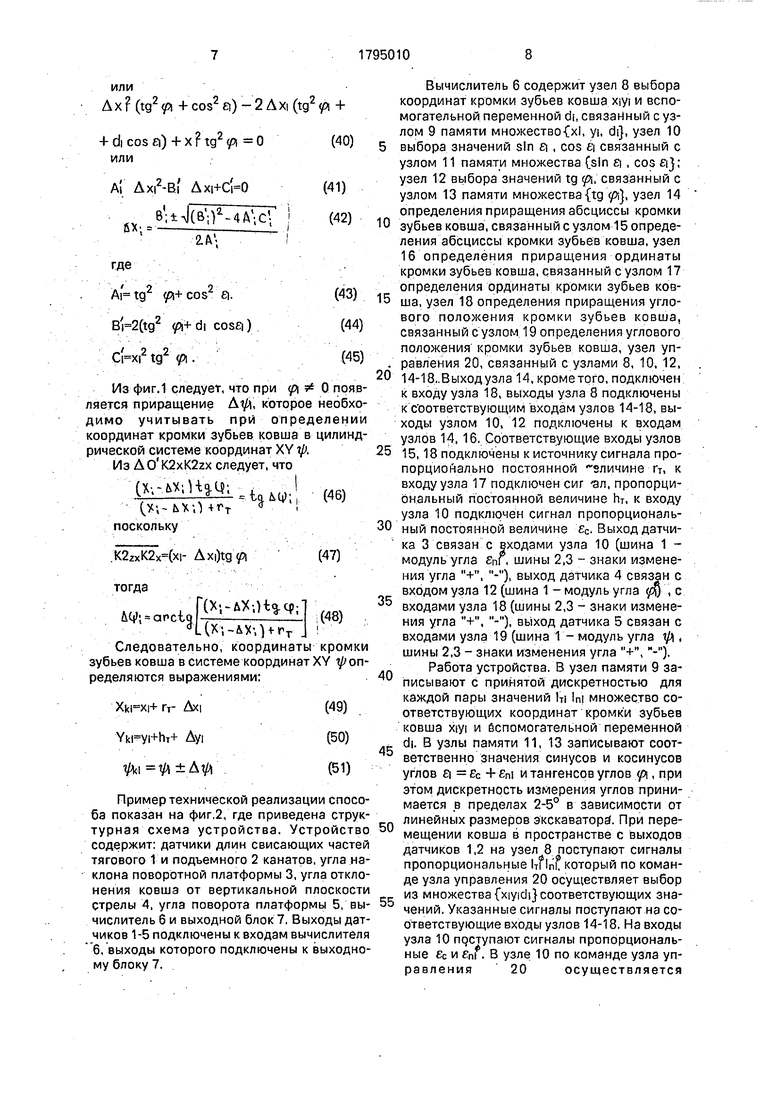
На фиг.1 показана расчетная схема для определения положения ковша; Иа фиг.2 - структурная схема устройства, реализующего способ контроля положения ковша экска- ватора-драглайна.
Предлагаемый способ включает следующие основные операции;
- осуществляют физическую модель системы стрела экскаватора - порожний
ю
ковш - упряжь ковша - тяговый и подъемный канаты ;
- задаются дискретностью изменения длин тягового IT и подъемного п канатов и используя модель, находят для каждой пары значений ITj lni соответствующие им координаты кромки зубьев порожнего ковша xiyi;
- задаются дискретностью изменения углов EI , $, нэходйТ для каждого возможного значения изменения указанных углов функции синуса, косиШуба .и тангенса и запоминают множество- этих ; значений соответствующих углам ,Ј|:, (р,
.Ј| ЈФ51П Si, COSEl
. . . . . - запоминают множество значений От Ini xjyi}, характеризующих возможное положение подвешенного на тяговом и подъемном канатах порожнего ковша в плоскости стрелы;
-определяют и запоминают для каждой пары ITi In множество значений расстояний di между кромкой зубьев ковша и условной осью стрелы { ITJ .
(1)
где NX,Ny радиус вращения и высота точки схода подъемного каната с направляющего щк ивэ; :
L - условная ось стрелы (расстояние между точками схода тягового и подъемного канатов с направляющих шкивов);
- измеряют угол наклона платформы в плоскости стрелы ,
- измеряют угол поворота платформы экскаватора t/i; . .
- измеряют угол отклонения ковша от вертикальной плоскости стрелы де;
- измеряют длины свисающих частей .тягового 1т10и подъемного lni канатов при перемещении подвешенного на тяговом и подъемном канатах порожнего ковша;
- определяют координаты кромки зубьев порожнего ковша, подвешенного на тяговом и подъемном канатах, путем выбора соответствующих lTflnf значений координат
xiy.;
- определяют координаты кромки зубьев ковша в цилиндрической системе коорди- .натХУ :-.
Xki xi+rr Дхг(5) Yki yi hT+Ayi (6) $. $ ±А$, (7) где Гт.Ьт - радиус и высота оси вращения направляющего шкива тягового каната;
5
0
5
0
5
ЛХ;
(в)4-4А ;СГЧ А
0. ,у,.
А(8) (9У
(10)
2А;; . , :
со5ге-,;
a slnEitg ifj + j;) |(11)
, ,f,.
cosЈ:
С i Ci xrtg4 p + cos2 Јi (tg2 +d cosfij)
(12)
(13)
(14)
onci3 HMO: (15) . -. . L( j IТаким образом, в процессе перемещения подвешенного на тяговом и подъемном канатах порожнего ковша по измеренным значениям свисающих частей тягового l-rfw подъемного lni канатов определяют координаты ковша в плоскости стрелы, затем, по измеренным величинам углов наклона платформы в плоскости стрелы Јi , поворота платформы $ и отклонения ковша от вертикальной плоскости стрелы р вычисляют вспомогательные переменные и определяQ ют координаты ковша в цилиндрической системе координат XY-, при этом ковш может находиться вне вертикальной плоскости стрелы (например, при его раскачивании, или при ускорениях и замедлениях вращеQ ния платформы), а поворотная платформа может иметь наклон к горизонтальной плоскости, что и имеет место при эксплуатации экскаватора. При этом, возможные значения {di},
5 si n ei, {cos Ј) ,(tg у.}
вычисляют заранее, а при измерении координат ковша производят их выборку из соответствующих множеств, что повышает точность определения координат кромки
Q зубьев ковша и существенно упрощает вычислительные процедуры. Последнее обстоятельство позволяет использовать простейшие вычислители при реализации способа.
При определении координат xiyi в плоскости стрелы учитываются провисы подъемного и тягового канатов, а также положение ковша в зависимости от его координат в плоскости стрелы. При отклонении ковша от вертикальной плоскости
стрелы на угол р (угол между горизонтальной проекцией условной оси стрелы и плоскостью направлящего шкива тягового каната) координаты xiyi изменяются, угловая координата положения ковша $ также изменяется (фиг.1).
Из А ОК1К1х (фиг.1):
(16)
I m (Nx-xi)2+(Ny - у,)2(17) Из Д ОМК1:
..CL-Ln.)2(18) Из Д MNK1:
Но К2ухК1 COS Ј
. тогда подставив (26) в (24), имеем:
(26)
MK2yx di Ayi
COS Ј|
(27)
10
поскольку K2zxK2x K2K2yx, то из ДМК2 К2уХ имеем:
d2 (x,-Ax1)(d,)2 (28)
15
но Д Х| Ду tg $
(29)
тогда
)
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ оперативного измерения производительности экскаватора-драглайна | 1987 |
|
SU1585462A1 |
| Способ управления разгрузкой ковша экскаватора-драглайна | 1987 |
|
SU1502723A1 |
| Способ контроля положения ковша экскаватора-драглайна | 1988 |
|
SU1578281A1 |
| Способ контроля угла откоса при использовании драглайна | 1983 |
|
SU1162904A1 |
| Способ контроля положения ковша экскаватора-драглайна | 1984 |
|
SU1219754A1 |
| Способ оценки качества управления экскаватором-драглайном | 1985 |
|
SU1344868A1 |
| Способ определения положения экскаватора-драглайна в пространстве | 1983 |
|
SU1121356A1 |
| ПОГРУЗОЧНЫЙ ЭКСКАВАТОР-ДРАГЛАЙН | 2010 |
|
RU2431719C1 |
| Экскаватор-драглайн | 1990 |
|
SU1728394A1 |
| Способ управления разгрузкой ковша экскаватора-драглайна | 1985 |
|
SU1263761A2 |

Изобретение относится автоматическому измерению эксплуатационных параметров экскаватора-драглайна и предназначается для контроля положения ковша. Цель изобретения - увеличение точности определения координат кромки зубьев; ковша. Дополнительно измеряют с дискретностью 2-5° угол поворота платформы ft, угол наклона платформы в плоскости стрелы Јni, угол отклонения ковша от вертикальной плоскости стрелы (р„ Определяют и запоминают множество значений {sin a, cos ei, tg pi}. Определяют и запоминают для каждой пары значений изменения длин тягового т и подъемного Ini канатов, соответствующие им значения расстояния di между кромкой зубьев ковша и угло вой.осыр стрелы. Определяют для контролируемого положения ковша величину di путем ее выбора в соответствии с фактическими длинами свисающих частей тягового 1Т| и подъемного Ini канатов. Координаты . кромки зубьев ковша определяют в цилиндрической системе координат с осью ординат, совпадающей с осью вращения экскаватора и с осью абсцисс, проходящей по рабочей плоскости пяты экскаватора, по формулам . + n - AXi; fk p +hT ijJk fy ±Д, где г; hi - радиус и высота оси вращения направляющего шкива тягового каната; АХс А ; At/ - приращения координат крышки зубьев ковша в пространстве при отклонении ковша от плоскости стрелы. 2 ил, ел х Ю СП о
n02-L2nl
(19)
20 ; K.1t|.
л 2diiV; & l-d - ---- +
cosЈ; со5
(20) 25 ИШ
25 n a 2.-,
.;Х- .Н.
Oniy+L2-(|fn,y 2L
(21)
d|. V((22)
т.е. при (fi 0 координаты кромки зубьев ковша xiyi определяются путем выборки соответствующих Ini IT| значений, а геометрические соотношения между координатами ковша xiyi и параметрами положения ковша описываются выражениями (16)-(22). При р & 0 при тех же значениях Inflff координаты кромки зубьев ковша изменяются
4на(-Дх)иДу(фиг.1:отрезкиК1хК2хиК1у К2у 45 поскольку Ду| Axictg d
соответственно). Аналогично
кромки зубьев ковша при изменении угла наклона платформы экскаватора, поскольку ,Јi Ее + Јni( Јni изменяется в пределах ± 5°).
(37)
то выражение (28) имеет следующий Аналогично изменяются координаты ВИдMHViX;fio2cp.)Z . . клона платформы экскаватора, поскольку . .о V . соэЈ; /
Определим зависимости Дх|.Д yi от Ј|, р. Из ДОК2хК22х (фиг.1):
(-. V (
K2zxK2x(xi- Axi)tg
MK2yx di-K2yxK1
с ;-2Х;лхЛ9 V.
(23) ss jKlii i+
(24) Sin2E; или
A
(38)
p)( di - расстояние между кромкой зубьев v у emЈ:
ковша и условной осью стрелы (ON).+&x ( гё , (39)
П Cf i
..Ч-i 2
1i 1,
; K.1t|.i-2X V;t e;t9zC|1 YfVe t 4+
л 2diiV; &Y l-d - ---- +
cosЈ; со5гЈ;
(3.0)
25 n a 2.-,
.;Х- .Н.
.+(s inViV,0-o
(X; sm Eiig cpi+d ;).
(31)
Аналогично определяем xi:
поскольку Ду| Axictg d
(37)
(-. V (
с ;-2Х;лхЛ9 V.
(38)
или
х (tg2 i + cos2 €i) - 2 Д xi ( +
(40)
- di cos ei) + xf tg2 yi 0 или
A Ax)2-Bi Axi+Ci 0
8;±л|(В1;)1-4А1;сГ
где
y j+cos2 a Br2(tg2 fn+di cosЈi)
Cpxi2 tg2 p.
(41)
(42)
(43)
(44)
(45)
Из фиг.1 следует, что при де 0 появляется приращение Д, которое необходимо учитывать при определении координат кромки зубьев ковша в цилиндрической системе координат XY тр.
Из Д О K2xK2zx следует, что
. Wuyiil m
(Ъ) + ГТ поскольку
K22xK2x(xi- Axi)tg р тогда
(47)
OPC X--UW I ;(48)
ЭЦХ ,-&Х-,) + Гт J Следовательно, координаты кромки зубьев ковша в системе координат XY определяются выражениями:
(49) .
(50)
(51)
Пример технической реализации способа показан на фиг.2, где приведена структурная схема устройства. Устройство содержит: датчики длин свисающих частей тягового 1 и подъемного 2 канатов, угла наклона поворотной платформы 3, угла отклонения ковша от вертикальной плоскости стрелы 4, угла поворота платформы 5, вычислитель 6 и выходной блок 7. Выходы датчиков 1-5 подключены к входам вычислителя 6, выходы которого подключены к выходному блоку 7.
0
5
0
5
0
5
0
5
0
5
Вычислитель 6 содержит узел 8 выбора координат кромки зубьев ковша xiyi и вспомогательной переменной di, связанный с узлом 9 памяти множество-Cxl, yi, ds}, узел 10 выбора значений sin Јi, cos Јi связанный с узлом 11 памяти множества (sin е, cos Јij; узел 12 выбора значений tg , связанный с узлом 13 памяти множества {tg р, узел 14 определения приращения абсциссы кромки зубьев ковша, связанный с узлом 15 определения абсциссы кромки зубьев ковша, узел 16 определения приращения ординаты кромки зубьев ковша, связанный с узлом 17 определения ординаты кромки зубьев ковша, узел 18 определения приращения углового положения кромки зубьев ковша, связанный с узлом 19 определения углового положения кромки зубьев ковша, узел управления 20, связанный с узлами 8, 10, 12, 14-18..Выходузла 14, крометого, подключен: к входу узла 18, выходы узла 8 подключены к Соответствующим входам узлов 14-18, выходы узлом 10, 12 подключены к входам узлов 14,16. Соответствующие входы узлов 15,18 подключены к источнику сигнала пропорционально постоянной зличине гт, к входу узла 17 подключен сиг -ал, пропорциональный постоянной величине пт, к входу узла 10 подключен сигнал пропорциональный постоянной величине Јс. Выход датчика 3 связан с входами узла 10 (шина 1 - модуль угла ЈпГ, шины 2,3 - знаки изменения угла +,-), выход датчика 4 связан с входом узла 1.2 (шина 1 - модуль угла $$ , с входами узла 18 (шины 2,3 - знаки изменения угла +, -), выход датчика 5 связан с входами узла 19 (шина 1 - модуль угла $ , шины 2,3 - знаки изменения угла +,-).
Работа устройства. В узел памяти 9 записывают с принятой дискретностью для каждой пары значений Ti Int множество соответствующих координат кромки зубьев ковша xiyi и вспомогательной переменной di. В узлы памяти 11, 13 записывают соответственно значения синусов и косинусов углов Ј| Јс +Јп и тангенсов углов де , при этом дискретность измерения углов принимается в пределах 2-5° в зависимости от линейных размеров экскаватора. При перемещении ковша в пространстве с выходов датчиков 1,2 на узел 8 поступают сигналы пропорциональные 1тГIni, который по команде узла управления 20 осуществляет выбор из множества {xiyidi} соответствующих значений. Указанные сигналы поступают на соответствующие входы узлов 14-18. На входы узла 10 пс/ступают сигналы пропорциональные Јс и Јп. В узле 10 по команде узла управления20 осуществляется
алгебраическое суммирование углов и выбор из множества (sin E cos соответствующих значений, которые поступают на входы узлов 14, 16. На вход узла поступает с выхода датчика 4 сигнал, пропорциональный модулю угла уз.Узел 12 по команде узла управления 20 обеспечивает выбор из множества {tg р соответствующего значения. Указанный сигнал поступает на входы узлов 14, 16. В свою очередь по команде узла управления 20 на выходе узла 14 формируется сигнал Axi (формулы 8, 10-12), который поступает на вход узла 15 и 18. На выходе узла 16 формируется сигнал Ayi (формулы 9, 12-14), который поступает на вход узла 17. На выходе узла 18 формируется сигнал А $ (формула 15), который поступает на вход узла 19, на второй вход которого поступает сигнал ip с выхода датчика 5, По команде узла управления 20 на выходах узлов 15, 17, 19 соответственно по формулам 5, 6, 7 формируются сигналы, характеризующие координаты XkiYki кромки зубьев подвешенного на тяговом и подъемном канатах ковша при изменяющихся значениях lni, hi, Јы . р. $ Численные значения координат ковша Синдицируются на выходном блоке 7.
Таким образом, устройством формируется информация, характеризующая координаты кромки зубьев порожнего ковша,
Ф о р м у л а и з о б р е т е н и я Способ контроля положения ковша экскаватора-драглайна по авт.св, Kb 1578281, о т л и ч а ю щи и с я тем, что, с целью упрощения и увеличения точности, дополнительно измеряют с дискретностью 2-5° углы поворота платформы $, наклона платформы в плоскости стрелы ЈП| и отклонения ковша от вертикальной плоскости стрелы де, при этом определят и запоминают множество значений{з п Ј, cos e, tg де), определяют для контролируемого положения ковша величины sin Q, cosei , tg путем их выбора в соответствии с фактическими значениями углов ef, (pf. определяют и запоминают для каждой пары значений изменения длин тягового 1Т|- и подъемного 1П( канатов, соответствующие им значения вспомогательной переменной di. определя- ют для контролируемого положения ковша
подвешенного на подъемном и тяговом канатах, что позволяет определять координаты любой точки в рабочей зоне забоя, т.е. определять фактические значения параметров паспорта экскавации.
Технико-экономические преимущества способа заключаются в следующем. Практическое использование способа позволит снизить объемы переэкскавации в сложных
бестранспортных технологических схемах за счет ликвидации нарушений заданных параметров пасп.орта экскавации. По предварительной оценке указанное обстоятельство позволит увеличить фактическую
производительность экскаватора на вскрыше за счет ликвидации бесполезной работы не менее, чем на 5%.
Экономическая эффективность от использования способа на драглайне типа
ЭШ20.90 составит
Куп Vr 3flon
0,1 хО,05хЗх 106-7000 8000руб„ где ,1 руб. - средняя стоимость переработки 1 м горной массы; ,05 - коэффициент увеличения производительности;
Vr 3-106 м3- средняя годовая производительность экскаватора;
руб. - ориентировочные до- полнительные затраты, связанные с оснащением экскаватора соответствующими средствами и их эксплуатацией.
величину вспомогательной переменной di путем ее выбора в соответствии с фактическими длинами свисающих частей тягового 1т|0и подъемного lnf канатов, а координаты- . кромки зубьев ковша определяют в цилиндрической системе координат с осью ординат, совпадающей с осью вращения экскаватора, и с осью абсцисс, проходящей по рабочей плоскости пяты экскаватора, по формулам
Xki-xi + rv Ах : Yki yi+hT+ Ayi. : tpk -fy±&-fi
где гт, Кт - радиус и высота оси вращения направляющего шкива тягового каната;
AXJ, Ayi,A -приращения координат кромки зубьев ковша в пространстве при отклонении ковша от плоскости стрелы.
Pe4aKtbp
Составитель С.Ворончихин
Техред М.Моргентал, Корректор Н.Слободяник
//2. /.
УС/Г...
| Способ контроля положения ковша экскаватора-драглайна | 1988 |
|
SU1578281A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
