Изобретение относится к шарикоподшипниковой промышленности, может быть использовано для оценки технического состояния радиальных подшипников качения как при конструировании, так и при эксплуатации.
Цель изобретения - повышение качестеа диагностики
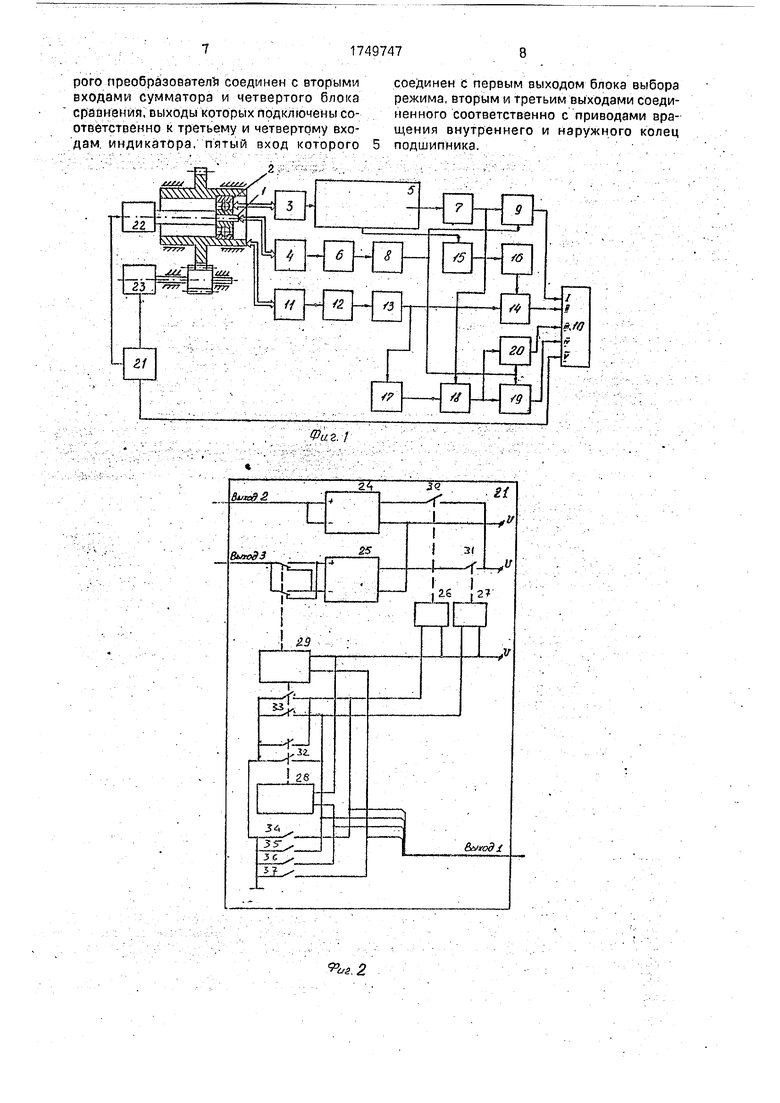
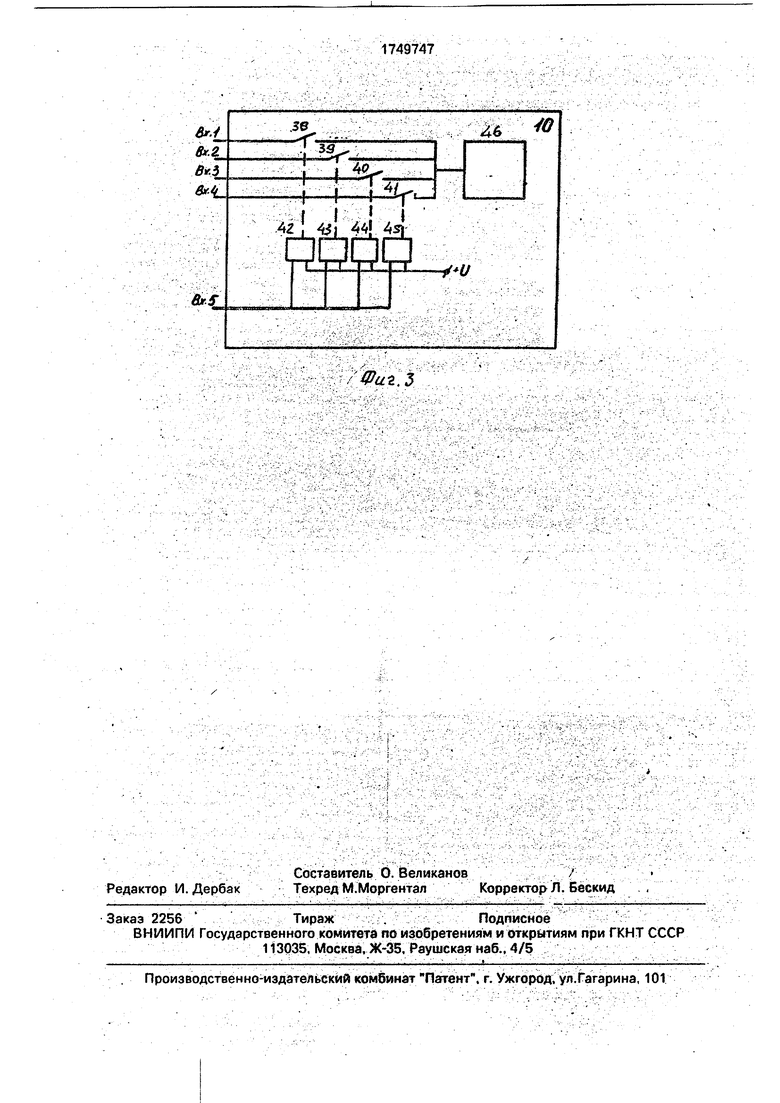
На фиг 1 представлена электрокинематическая структурная схема устройства; на фиг 2 - электрическая структурная схема блока выбора режима, на фиг 3 - электрическая структурная схема индикатора, соответствующая схема блока выбора режима.
Устройство (фиг 1) содержит вал 1, предназначенный для установки исследуемого подшипника 2, первый 3 и второй 4 бесконтактные датчики, служащие для измерения скорости вращения сепаратора и внутреннего кольца подшипника 2, выходы которых подключены к входам первого 5 и второго 6 делителей соответственно, причем делитель 5 состоит из двух последовательно соединенных каскадов, выходы которых являются вторым и первым выходами делителя 5. Первый выход первого делителя 5 подключен к входу первого преобразователя 7 частота-напряжение а выход второго делителя б - к входу второго преобразователя 8 частота-напряжение Выходы преобразователя 7 и 8 подкючены к входам первого сравнивающего блока 9, выход которого соединен с первым входом индикатора 10 Устройство содержит также последовательно соединенные третий бесконтактный датчик 11, служащий для измерения скорости вращения наружного кольца подшипника 2, третий делитель 12, третий преобразователь 13 частота-напряжение и второй сравнивающий блок 14, кроме того четвертый преобразов атель 15 частота-напряжение, четвертый 16 и пятый 17 делители третий 18 и четвертый 19 сравнивающие блоки, сумматор 20 и блок 21 выбора режима контроля скольжения Причем вход четвертого преобразователя 15 соединен с вторым выходом первого делителя 5, а выход - с входом четвертого делителя 16, выход которого подключен к второму входу второго сравнивающего блока 14, выход которого соединен с вторым входом индикатора 10 Выход третьего преобразователя 13 через пятый делитель 17 подключен к ппрвому входу третьего
сл
xs
4 Ь. М
сравнивающего блока 18, второй вход которого соединен с выходом первого преобразователя 7, а оыход подключен к объединенным первым входам четвертого сравнивающего блока 19 и сумматора 29, объединенные вторые входы которых подключены к выходу второго преобразователя 8, Выходы сумматора 20 и четвертого сравнивающего блока 19 подключены соответственно к третьему и четвертому входам индикатора 10, пятый вход которого соединен с первым выходом блока 21 выбора режима, второй и третий выходы которого подключены к приводу 22 вращения вала (т.е. внутреннего кольца подшипника 2} и к приводу 32 вращения наружного кольца подшипника 2 соответственно.
Блок 21 выбора режима (фиг.2) содержит два источника 24 и 25 постоянного тока, четыре реле 26-29 и восемь ключей 30-37. Индикатор 10 (фиг.З) содержит четыре ключа 30-41, четыре реле 42-45 и устройство 46 отображения информации.
Устройство работает следующим образом.
При помощи блока 21 выбора режима выбирают один из четырех возможных режимов контроля скольжения, соответствую- щи-х реальным режимам работы радиального подшипника со следующими соотношениями частот вращения fe и тн внутреннего и наружного колец подшипника соответственно: режим 1 - f 0 0; TH 0 - вращение внутреннего кольца; режим 2 - fa 0; fit Vs 0 - вращение наружного кольца; режим 3 - fB 0; fH 0 - вращение колец в одном направлении; режим 4 - fB 0, т Ф - вращение колец в противоположных направлениях.
При этом скольжение для радиального подшипника (с учетом угла контакта а- 0) вычисляется по соответствующим формулам:
Режим 1 - fcK - fo - fc/Kt; Режим 2 - fcK - fa - fc/K2; Режим 3 - ск fe + fn/Кз - fc/Kt; Режим 4 - fCK fo - Jn/Кз - fc/Ki; где fc - частота вращения сепаратора;
Ki. K2 и Кз - коэффициенты деления, равные:
2D
./,-. Р.+...
D-d
где D - диаметр окружности, через центры тел качения; d - диаметр тела качения,
Диаметр D окружности центров тел качения и диаметр d тела качения определяются из технической документации на подшипник.
Выбор режима контроля осуществляется замыканием одного из ключей блока 21:34, 35, 36 или 37 (фиг.2).
Для выбора режима 1 замыкают контакты ключа 34. При этом срабатывает реле 26,
0 замыкаются контакты 30 и подается питание на источник 24 постоянного тока, выход которого соединен с входом привода 22. Привод 22 приводит во вращение внутреннее кольца подшипника 2, а его наружное
5 кольцо оказывается заторможенным, так как на привод 23 питание не подается. С выхода бесконтактных датчиков 3 и 4 сигналы, пропорциональные частотам вращения сепаратора и внутреннего кольца, подаются
0 на первый каскад делителя 5 и делитель б с коэффициентами деления, равными коэффициентам передачи бесконтактных датчиков 3 и 4 соответственно. Кроме того, сигнал с датчика 3 в первом каскаде делителя 5
5 делится на коэффициент KL учитывающий геометрические параметры исследуемого подшипника. Выходные сигналы с первого выхода делителя 5 и делителя б прербразу- ются с помощью преобразователей 7 и 8 в
0 аналоговые и подаются на входы сравнивающего блока 9. Выходной сигнал блока 9 соответствет величине скольжения гсл.
С ключа 34 напряжение низкого уровня подается через первый выход блока 21 вы5 бора режима и пятый вход индикатора 10 на реле 42 (фиг.З), что приводит к подаче ыход ного сигнала сравнивающего блока 9 на вход устройства 46 отображения информации через замкнутые контакты 38 и отобра0 жонию величины скольжения fCK.
Для контроля скольжения в режиме 2 замыкают контакты ключа 35 блока 21 выбора режима. При этом срабатывает реле 27, замыкаются контакты 31 и подается напря5 жение питания на источник 25 постоянного тока, выход которого соединен с входом привода 23, Привод 23 приводит во вращение наружное кольцо подшипника. Его внутреньзе кольцо оказывается ззстопо0 ренным, так как на привод 22 питание не подается. С выхода бесконтактных датчиков 3 и 11 сигналы, пропорциональные частотам вращения сепаратора и наружного кольца, подаются на первый каскад делите5 ляф 5 и делитель 12 с коэффициентами деления, равными коэффициентам передачи соответствующих бесконтактных датчиков 3 и 11. Выходные сигналы с второго выхода делителя 5 и делителя 12 преобразуются с помощью преобразователей 15 и 13 в аналоговые, причем выходной сигнал преобразователя 15 делится в делителе 16 на коэффициент Кг и подается на второй вход сравнивающего блока 1Ж на первый вход которого подается сигнал с выхода преобразователя 13. Выходной сигнал сравнивающего блока 14 соответствует величине скольжения f«. С ключа 35 напряжение низкого уровни через первый выход блока 21 выбора режима и пятый вход индикатора 10 подается на реле 43. Вследствие этого выходной сигнал сравнивающего блока 14 поступает на вход устройства 46 отображения информации через замкнутые контакты 39 и отображается
Для выбора режима 3 замыкают контакты ключа 36 блока 21 выбора режима При этом срабатывает реле 2В и замыкаются контакты 32, что приводит к срабатыванию реле 26 и 27 и подаче питающего напряжения на входы источников 24 и 25 постоянного тока, выходы которых соединены с приводами 22 и 23 соответственно. Приводы 22 и 23 приводят анутреннее и наружное кольца подшипника во вращение в одном направлении
При этом как в режимах 1 и 2, на выходах делителей 5, 6 и 12 присутствуют сигналы, соответствующие частотам вращения сепаратора, внутреннего и наружного колец подшипника 2 Выходные сигналы с первого каскада делителя 5 и преобразователя 13 подаются на второй каскад делителя 5 и делитель 17, производящие деление входных сигналов соответственно на коэффициенты Ни и Кз, учитывающие геометрические параметры исследуемого подшипника Выходной сигнал с первого выхода делителя 5 преобразуется в преобразователе 7 в аналоговый Выходной сигнал делителя 17 подается на перывй вход сравнивающего блока 18. на второй вход которого подается сигнал е преобразователя 7 а выходной сигнал сравнивающего блока 18 подается на второй вход сумматора 20 на первый вход которого подается сигнал с выхода преобразователя 8 С ключа 36 сигнал низкого уровня подается через первый выход блока 21 выбора режима и пятый вход индикатора 10 на реле 44, которое замыкает контакты 40, и выходной сигнал сумматора 20 подается на вход устройства 46 отображения информации, на котором отражается величина скольжения ТСк
Для выбора режима 4 замыкают контакты ключа 37 блока 21 выбора режима контроля При этом срабатывает реле 29 и замыкаюся контакты ключа 33, что приводит к срабатыванию реле 26 и 27 и подаче питающего напряжения на входы источников 24
и 25 постоянного тока, выходы которых соединены с приводами 22 и 23 соответственно. При замыкании вторых нормально разомкнутых контактов реле 29 происходит
5 переключение полярности наггряжния, питающего привод 23, что приводит к вращению внутреннего и наружного колец подшипника в противоположном направлениях.
10 Режим 4 аналогичен режиму 3 и отличается тем, что выходной сигнал сравнивающего блока 18 подается на первый вход сравнивающего блока 19, на второй вход которого подается сигнале выхода преобра15 озвателя 8
С ключа 37 сигнал низкого уровня подается через первый выход блока 21 и пятый вход индикатора 10 на реле 45, которое замыкает контакты 41 и выходной сигнал срав0 нивающего1 блока 19 подается на вход устройства 46 отображенияинформации на котором отображается величина скольжения fCK
5 Формула изобретения
Устройство для контроля скольжения в подшипниках качения, содержащее привод вращения внутреннего кольца подшипника, бесконтактные датчики частоты вращения
0 сепаратора и внутреннего кольца подшипника, выход первого из которых подключен через последовтельно соединенные первый делитель, первый преобразователь и первый блок сравнения к первому входу инди5 катора, а выход второго датчика через последовательно соединенные второй делитель, второй преобразователь подключен к второму входу первого блока сравнения, о т- личающееся тем, что, с целью повыше0 ния качества диагностики, в устройство введены привод вращения наружного кольца подшипника, последовательно соединенные третий бесконтактный датчик, третий делитель третий преобразователь и второй
5 блок сравнения, последовательно соединенные четвертый преобразователь, и четвертый делитель, последовательно соединенные пятый делитель, третий и четвертый блоки сравнения а также сумматор
0 и блок выбора режима, причем вход четвертого преобразователя соединен с вторым выходом первого делителя, а выход четвертого делителя -с вторым входом второго блока сравнения, выход которого подклю5 чен к второму входу индикатора, выход третьего преобразователя соединен с входом пятого делителя, выход первого преобразователя - с вторым входом третьего блока сравнения, выход которого также связан с первым входом сумматора, выход второго преобразователи соединен с вторыми входами сумматора и четвертого блока сравнения, выходы которых подключены соответственно к третьему и четвертому входам индикатора, пятый вход которого
соединен с первым выходом блока выбора режима вторым и третьим выходами соединенного соответственно с приводами вращения внутреннего и наружного колец подшипника.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА СТАБИЛИЗАЦИИ ТЕМПЕРАТУРЫ В РАБОЧЕЙ КАМЕРЕ УСТРОЙСТВА ДЛЯ ПРОИЗВОДСТВА ВЗОРВАННОГО ЗЕРНА | 1998 |
|
RU2147139C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ И КОНТРОЛЯ ТЕМПЕРАТУРЫ ТЕПЛОНОСИТЕЛЯ СУШИЛКИ ЗЕРНА С ТЕПЛОГЕНЕРАТОРОМ, РАБОТАЮЩИМ НА ТВЕРДОМ ТОПЛИВЕ | 1996 |
|
RU2117227C1 |
| Устройство для измерения жесткости подшипника качения | 1983 |
|
SU1134896A2 |
| БЕСКОНТАКТНЫЙ КОДОВЫЙ ПУТЕВОЙ ТРАНСМИТТЕР | 2013 |
|
RU2526726C1 |
| Система регулирования диаметра жил на бумагомассной машине | 1986 |
|
SU1472879A1 |
| Электропривод | 1981 |
|
SU1083319A1 |
| Устройство для управления процессом пропитки текстильного материала | 1987 |
|
SU1506955A1 |
| Устройство для преобразования сигналов резистивных датчиков в цифровой код | 1973 |
|
SU481130A1 |
| УСТРОЙСТВО УНИЧТОЖЕНИЯ ИНФОРМАЦИИ С ОПТИЧЕСКИХ И МАГНИТООПТИЧЕСКИХ ДИСКОВ | 2008 |
|
RU2389556C1 |
| Устройство для автоматизированного контроля параметров реле | 1985 |
|
SU1265704A1 |
Использование машиностроение Сущ ность изобретения устройство обеспечива ет измерение величины скольжения в радиальных подшипниках в режимах, соответствующих различным соотношениям частоты и направления вращения колец подшипника, и содержит приводы вращения наружного и-внутреннего колец под- шилника, датчики частоты вращения колец и сепаратора, преобразователи делители, сравнивающие устройства и индикатор атак,- же блок выбора режима диагностики 3 ил
,- 20 JP
/ I
/Фиг.Ъ
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СКОЛЬЖЕНИЯ В ПОДШИПНИКАХ КАЧЕНИЯ | 0 |
|
SU347618A1 |
| Контрольный висячий замок в разъемном футляре | 1922 |
|
SU1972A1 |
