Изобретение относится к машиностроению, в частности к опорам роторных машин.
В известных технических решениях не предусмотрены средства для повышения надежности работы роторной машины на переходных режимах, когда возможны увеличенные деформации деталей, например, при разогреве машины.
Для предотвращения касания вращающихся и неподвижных деталей роторных машин, возможного в результате коробления корпуса или ротора при разогреве, обычно ограничивают скорость разогрева и предусматривают достаточно большой зазор между деталями ротора и статора или применяют разрушаемые элементы уплотнения проточной части.
Ограничение скорости разогрева снижает маневренность машины, а увеличение зазора в проточной части ухудшает экономичность, в особенности при малых высотах
проточной части, за счет увеличения протечек.
Различные разрушаемые уплотнения снижают надежность, дополнительно нагружая детали, и не обеспечивают стабильности перетечек из-за увеличения зазора на других режимах.
Известны также различные приемы компенсации изменения зазора роторной машины при разогреве. Например, способ защиты ротора паровой турбины от контакта с корпусом заключается в установке электронагревателя вокруг кольца диафрагмы и разогрева этого кольца при пуске турбины.
Однако это техническое решение связано с дополнительными энергозатратами и из-за большой инерционности не эффективно для высокооборотных машин специального назначения, предъявляющих повышенные требования к маневренности.
VI ел
Ј ю о
Известен также способ гашения колебаний ротора с помощью дополнительного активного магнитнбго подшипника, установленного в зоне увеличения амплитуды отклонения, при осуществлении которого создают силу, демпфирующую колебания пропорционально скорости смещения оси ротора в месте установки дополнительного подшипника.
Однако для создания этого демпфирующего усилия требуются соответствующие энергозатраты, и более эффективным для большого класса роторных машин оказывается увеличение скорости прохождения зоны увеличенных (резонансных) колебаний.
Наиболее близким к предлагаемому является способ управления радиальными активными магнитными подшипниками, заключающийся в измерении зазоров в подшипниках и регулирования величины тока электропитания магнитов подшипников по величине изменения зазоров и скорости изменения зазоров.
Машина для осуществления этого способа содержит статор и установленный в радиальных активных магнитных подшипниках ротор систему автоматического регулирования, состоящую из контуров стабилизации/включающих датчики положения ротора в подшипниках, блоки сигна- лизации,блокисравнения,
пропорционально-дифференциальные регуляторы, усилители мощности и электромагниты.
Однако не обеспечивает необходимой надежности работы на переходных режимах роторной машины, вызывающих увели- ченные деформации, При разогреве, прохождении критических оборотов и в других случаях увеличения деформаций возможно касание вращающихся и неподвижных деталей машины, что может привести к аварийной ситуации, в особенности при высоких скоростях вращения.
Цель изобретения - повышение надежности работы роторной машины путем исключения касания ротором статора машины в переходных режимах.
Для достижения поставленной цели при осуществлении способа управления радиальными активными магнитными подшипниками роторной машины, включающем в себя регулирование величины тока питания электромагнитов подшипников по величине и скорости изменения зазоров в подшипниках, дополнительно измеряют величину зазора между ротором и статором роторной машины в зоне наибольшей деформации ротора и с учетом изменения этого зазора
регулируют величину тока питания электромагнитов подшипников.
В роторной машине, содержащей статор, установленный в радиальных активных
магнитных подшипниках ротор, и систему автоматического регулирования, состоящую из контуров стабилизации, включающих датчики положения ротора в подшипниках и соединенные с ним блоки
0 сигнализации, блоки сравнения, пропорционально-дифференциальные регуляторы, усилители мощности и электромагниты подшипников, зазоры в подшипниках выполнены большими по величине, чем зазоры
5 между ротором и статором машины в зоне наибольшей деформации ротора, а система автоматического регулирования дополнительно снабжена контурами адаптации, включающими датчики положения ротора в
0 зоне его наибольшей деформации, вычислитель на основе сумматоров и интегратора, а также делитель напряжения, сопротивления ступеней которого пропорциональны расстояниям между подшипниками и зоной
5 наибольшей деформации ротора, а их выходы соединены с задающими входами блоков сравнения контуров стабилизации.
Согласно предлагаемому способу удерживаются близкими к первоначальным за0 зоры в рабочей части машины за счет перемещения осей в подшипниках и синхронно компенсирующего влияния деформаций деталей машины на зазоры в рабочей части. Для этого измеряют зазоры в рабочей
5 части, в зоне наибольшей деформации ротора и вырабатывают дополнительный управляющий сигнал для каждого электромагнита подшипников по изменению зазоров. Удержание величины зазоров рабочей части не0 смотря на деформацию деталей ротора и статора, позволяет выполнять эти зазоры минимальными по возможностям конкретной технологии изготовления и сборки машины и в то же время обеспечить
5 надежность работы на переходных режимах, когда, например, термические деформации при разогреве или упругие деформации при вибрациях достигают довольно значительных величин.
0 При деформации корпуса корректировка величины тока электромагнитов приводит к сдвигу создаваемого электромагнитного поля таким образом, что оно удерживает шейки ротора подшипни5 ков в новом положении, смещенном от геометрической оси для компенсации деформации.
При деформации ротора соответствующая корректировка электромагнитов приведет к дополнительному вращению
электромагнитного поля вслед за вращающейся изогнутой осью ротора. Так как изменение зазоров в рабочей части стремится к нулю, центр тяжести остается неподвижным, поскольку зазоры в подшипниках пре- вышают описываемую наружной поверхностью цапфы окружность, энергозатраты на вращение электромагнитного поля стремятся к нулю
В системе автоматического регулирования имеются дополнительные контуры адаптации, подключенные к задающим входам блоков сравнения контуров стабилизации, что позволяет осуществить необходимую корректировку величины тока питания электромагнитов подшипников.
Таким образом, предлагаемый способ не только обеспечивает надежную работу машины, но и позволяет улучшить ее экономические показатели за счет снижения перетечек в проточной части газодинамических машин или потерь в зазоре рабочей части электрических машин,
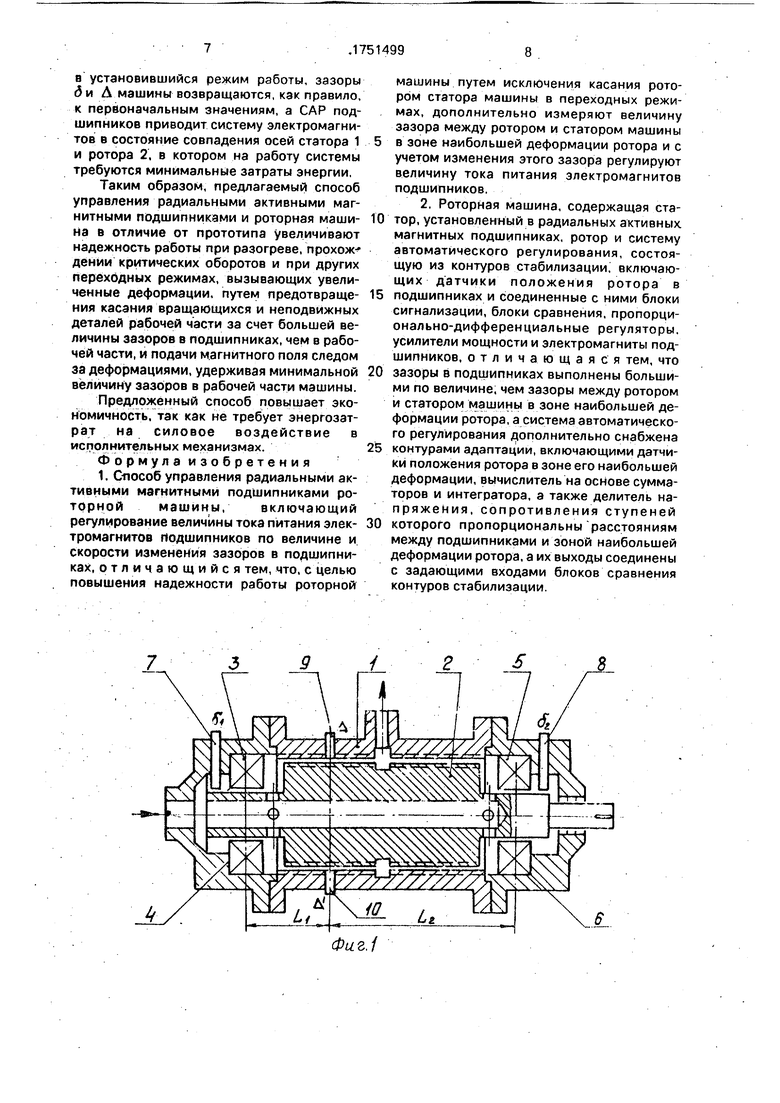
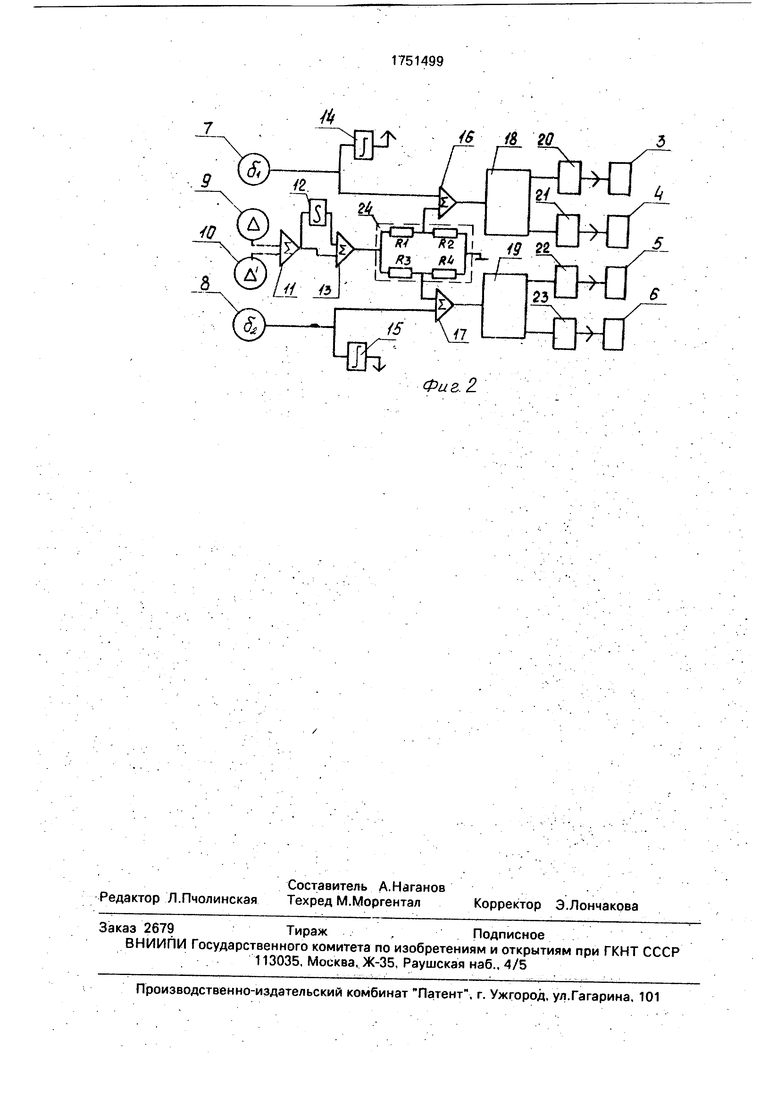
На фиг. 1 представлена схема роторной машины; на фиг. 2 - схема системы автоматического управления ее активными магнитными подшипниками.
Роторная машина содержит статор 1 и вращающийся ротор 2, образующий со статором рабочую часть (например, изображенный на фиг, 1 лабиринтно-винтовой нагреватель) Ротор 2 установлен на активных магнитных подшипниках с электромагнитами 3-6, размещенными в одной из плоскостей, показаны на фиг. 1.
Машина снабжена внешней системой автоматического регулирования (САР). В состав САР входят датчики 7 и 8 зазоров д в подшипниках, датчики 9 и 10 зазоров рабочей части, установленные в наиболее опасном месте (например, на расстояниях Li и L.2 от соответствующих опор) в зоне наибольшей деформации ротора 2
Эти места установлены расчетом деформаций и (или) измерением расстояний и до места касания деталей ротора и статора во время проверок и испытаний модели машины, например, макетного образца.
Сумматор 11, интегратор 12, сумматор 13, сигнализаторы 14 и 15 предельных значений и блоки сравнения 16 и 17, ПД-регу- ляторы 18 и 19, усилители 20-23 и делитель 24 напряжения установлены вне роторной машины, обычно в отдельном шкафу управления, и образуют внешнюю САР подшипников.
Величина сопротивлений R1,R2,R3,R4 ступеней делителя напряжения 24 пропорциональна расстояниям Li и L2 между подшипниками и опасным сечением, в котором установлены датчики 9 и 10.
Предлагаемый способ управления радиальными активными магнитными подшипниками роторной машины осуществляют следующим образом.
Перед включением подают напряжение через усилители 20-23 на соответствующие электромагниты 3-6 подшипников. Поддействием магнитного поля ротор 2 всплывает, по сигналам от датчиков 7-10 САР устанавливают такие величины токов усилителей 20-23, при которых оси ротора 2 и статора 1 совпадают, силы маг нитйбго поля уравновешивают силы, действующие на ротор.
Затем приводят во вращение ротор 2, и машина начинает осуществлять свою рабочую функцию. Например, ротор 2 вращают с помощью высокочастотного электропривода, а лабиринтно-винтовые нарезки рабочей части, образованной статором 1 и ротором 2 с зазором, А нагнетают газ. При сжатии газ нагревается, что приводит к разогреву деталей машины и их температурным деформациям, кроме того, при раскрутке ротора 2 возможно прохождение критических оборотов (в случае гибкого ро- Yopa), когда деформации ротора увеличены. Для получения увеличенного напора нагнётателя зазоры А и Д рабочей части машины выполняют минимальными из условия изготовления и сборки деталей. В наиболее опасных местах эти зазоры контролируют датчиками 9 и 10. При появлении разницы в
показателях преобразователей 9, 10 она выявляется в сумматоре 11 и подается на блоки 12 и 13. Если разность носит статический характер (вызвана деформацией корпуса), то на выходе интегратора 12 появляется постоянный сигнал, который через сумматор 13 и делитель 24 подается на задающие входы контуров стабилизации блоков сравнения 16,17, вызывая смещение оси ротора до тех пор, пока разность средних значений
показаний 9 и 10 не станет равной нулю.
Если разность носит динамический характер (вызвана деформацией ротора), то после инвертирования в сумматоре 13 она также поступает на задающие входы блоков
сравнения 16, 17, вызывая противофазные перемещения шеек вала в опорах, в результате чего за счет жесткости ротора уменьшается амплитуда его колебаний в рабочей зоне, а концы ротора будут совершать вращательные движения в опорах.
После установления стабильных температур деталей или прохождения критических оборотов деформации деталей уменьшаются, роторная машина переходит
в установившийся режим работы, зазоры (ЗиЛ машины возвращаются, как правило, к первоначальным значениям, а САР подшипников приводит систему электромагнитов в состояние совпадения осей статора 1 и ротора 2, в котором на работу системы требуются минимальные затраты энергии,
Таким образом, предлагаемый способ управления радиальными активными магнитными подшипниками и роторная маши- на в отличие от прототипа увеличивают надежность работы при разогреве, прохож-- дении критических оборотов и при других переходных режимах, вызывающих увеличенные деформации, путем предотвраще- ния касания вращающихся и неподвижных деталей рабочей части за счет большей величины зазоров в подшипниках, чем в рабочей части, и подачи магнитного поля следом за деформациями, удерживая минимальной величину зазоров в рабочей части машины.
Предложенный способ повышает экономичность, так как не требует энергозатрат на силовое воздействие в исполнительных механизмах.
Формула изобретения
1. Способ управления радиальными активными магнитными подшипниками роторной машины, включающий регулирование величины тока питания элек- тромагнитов Подшипников по величине и скорости изменения зазоров в подшипниках, отличающийся тем, что, с целью повышения надежности работы роторной
машины путем исключения касания ротором статора машины в переходных режимах, дополнительно измеряют величину зазора между ротором и статором машины в зоне наибольшей деформации ротора и с учетом изменения этого зазора регулируют величину тока питания электромагнитов подшипников.
2, Роторная машина, содержащая статор, установленный в радиальных активных магнитных подшипниках, ротор и систему автоматического регулирования, состоящую из контуров стабилизации, включающих датчики положения ротора в подшипниках и соединенные с ними блоки сигнализации, блоки сравнения, пропорционально-дифференциальные регуляторы, усилители мощности и электромагниты подшипников, отличающаяся тем, что зазоры в подшипниках выполнены большими по величине, чем зазоры между ротором и статором машины в зоне наибольшей деформации ротора, а система автоматического регулирования дополнительно снабжена контурами адаптации, включающими датчики положения ротора в зоне его наибольшей деформации, вычислитель на основе сумматоров и интегратора, а также делитель на- пряжения, сопротивления ступеней которого пропорциональны расстояниям между подшипниками и зоной наибольшей деформации ротора, а их выходы соединены с задающими входами блоков сравнения контуров стабилизации

| название | год | авторы | номер документа |
|---|---|---|---|
| Радиальная электромагнитная опора активного магнитного подшипника | 2020 |
|
RU2728916C1 |
| МАГНИТНЫЙ ПОДВЕС РОТОРА УСТРОЙСТВА | 1992 |
|
RU2037685C1 |
| СПОСОБ РАБОТЫ РОТОРНО-ЛОПАСТНОЙ МАШИНЫ (ВАРИАНТЫ) И РОТОРНО-ЛОПАСТНАЯ МАШИНА | 2013 |
|
RU2587506C2 |
| РОТОРНАЯ РЕГУЛИРУЕМАЯ РЕВЕРСИВНАЯ МАШИНА | 1997 |
|
RU2126911C1 |
| Радиальная электромагнитная опора для активного магнитного подшипника | 2021 |
|
RU2763352C1 |
| ПОДШИПНИК СИСТЕМЫ ЭНЕРГОНЕЗАВИСИМОГО АКТИВНОГО МАГНИТНОГО ПОДВЕСА РОТОРА | 2003 |
|
RU2246644C1 |
| ЦЕНТРОБЕЖНЫЙ КОМПРЕССОР | 2015 |
|
RU2584224C1 |
| УПЛОТНЕНИЕ ЛОПАСТИ РОТОРНОЙ МАШИНЫ | 1989 |
|
RU2018696C1 |
| РОТОРНАЯ ЛОПАСТНАЯ МАШИНА С КОНУСНЫМ РОТОРОМ | 1996 |
|
RU2116462C1 |
| КУЛАЧКОВАЯ РОТОРНО-ПОРШНЕВАЯ МАШИНА | 1994 |
|
RU2072432C1 |
Изобретение м.б. использовано в опорах роторных машин. Согласно предлагаемому способу измеряют величину зазоров в подшипниках и между ротором и статором машины в зоне наибольшей деформации ротора. С учетом изменения зазора в зоне наибольшей деформации ротора регулируют величину тока питания электромагнитов подшипников. Роторная машина для осуществления способа со держит статор, установ- ленный в радиальных активных подшипниках, ротор и систему автоматического регулирования с датчиками положения ротора в подшипниках и датчиков положения ротора в статоре. Зазоры в подшипниках выполняют большими, чем зазоры между ротором и статором в зоне наибольшей деформации ротора. 2 с.п. ф- лы, 2 ил. (Л с
Фиг
а го
г/
19 &
23
лл L-J
3
JL
JL
Ј
Фиг 2.
| Журавлев Ю.Н | |||
| и др | |||
| Разработка электромагнитных опор для высокоскоростных шпинделей | |||
| (Отчет) / Псковский филиал ЛПИ им | |||
| Калинина | |||
| № ГР 0182007797, Инв | |||
| Nfe02850041350.-Псков, 1984, с | |||
| Способ использования делительного аппарата ровничных (чесальных) машин, предназначенных для мериносовой шерсти, с целью переработки на них грубых шерстей | 1921 |
|
SU18A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ приготовления сернистого красителя защитного цвета | 1921 |
|
SU84A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
