Изобретение относится к подшипниковым устройствам роторных машин и может использоваться в составе различных установок с быстровращающимся ротором, таких как турбоагрегаты, центробежные компрессоры и турбодетандеры, электродвигатели и электрогенераторы.
Известны активные магнитные подшипники (АМП), получившие широкое применение в современных нагнетателях газоперекачивающих агрегатов, в комплект которых входит: радиальная опора, включающая в свой состав радиальный электромагнит, датчик (датчики) радиального положения ротора и страховочный подшипник; радиально - осевая опора, в состав которой включены элементы радиальной опоры, а также осевой электромагнит двухстороннего действия и датчик осевого положения ротора; шкаф управления с комплектом кабелей. [Сарычев А.П., Верещагин В.П. Электромагнитные подшипники для Газпрома // Электротехника. – М.: 1996. - №5. - С. 29-31].
Устройство известных АМП нагнетателей ГПА также описано в патенте РФ на изобретение №2115835, опубл. 1998 г. и в патенте на изобретение №2251033, опубл.2005 г.
В известных АМП статор радиальных электромагнитов представляет собой многополюсный магнитопровод, в виде пакета электротехнической стали, на полюсах которого размещаются обмотки, а ротор представляет собой цилиндр, внешняя сторона которого выполнена в виде пакета электротехнической стали [Сарычев А.П. Разработка электромагнитных подшипников для серии компрессоров газоперекачивающих агрегатов // Труды НПП ВНИИЭМ. - М.: 2009. - Т. 110. - С. 3-10.].
Недостатками известных АМП является то, что конструкция радиальных опор предопределяет несовпадение в осевом направлении поверхностей, на которые действуют удерживающие силы, и поверхностей, по которым формируется датчиками положения сигнал отклонения ротора. Это несовпадение приводит, во-первых, к существенному ужесточению требований к точности изготовления и взаимной компоновки элементов конструкции ротора и статора радиальной опоры, а во-вторых, - к усложнению алгоритмов отладки контуров АМП.
Известны технические решения, позволяющие снизить потребную мощность выходных усилителей регуляторов тока АМП за счет введения обмоток начального подмагничивания в конструкцию электромагнитов [Журавлев Ю.Н. Активные магнитные подшипники: Теория, расчет, применение. - СПб.: Политехника, 2003. - С. 60]. Вместе с тем, при определенных вариантах исполнения обмоток подмагничивания между обмотками подмагничивания и управления существует нежелательная сильная магнитная связь, которая взаимно связывает процессы изменения токов в обмотках при работе контуров стабилизации.
Задачей, на решение которой направлено изобретение, является создание простой компактной конструкции радиальной опоры для АМП различных машин с быстровращающимся ротором, в которой обеспечена минимальная магнитная связь между обмотками подмагничивания и управления.
Технический результат, достигаемый изобретением, состоит в возможности применения радиальных электромагнитов специальной конструкции с пониженными требованиями к точности изготовления элементов опор и их взаимного расположения, снижении мощности выходных каскадов регуляторов тока радиальных каналов стабилизации АМП и возможности создания компактных электронных модулей, размещаемых в конструкции опор или в непосредственной близости к опорам.
Технический результат достигается тем, что в радиальной опоре для активного магнитного подшипника, содержащей радиальный электромагнит и двухкоординатный емкостный датчик зазоров, статор радиального электромагнита выполнен в виде цилиндрического корпуса из магнитомягкого ферромагнитного материала, внутри которого установлены два статора регулирующих электромагнитов, содержащих магнитопроводы в виде пакетов электротехнической стали с четырьмя внутренними зубцами, на которых расположены четыре управляющих обмотки, и вкладыш, содержащий подмагничивающую обмотку и двухкоординатный емкостный датчик зазоров, установленный между статорами регулирующих электромагнитов, а ротор выполнен в виде втулки из магнитомягкого ферромагнитного материала, размещаемой на вращающемся валу, на концах которой размещены два ротора управляющих магнитов в виде цилиндрических пакетов из листов электротехнической стали, при этом двухкоординатный емкостный датчик зазоров выполнен в виде статора либо с четырьмя рядами токопроводящих электродов, причем два из них в виде колец являются токосъемными электродами, а два ряда в виде изолированных полуколец, ориентированных относительно двух радиальных осей, являются измерительными электродами, либо с тремя рядами токопроводящих электродов, причем два из них в виде колец являются токосъемными электродами, а третий ряд в виде четырех изолированных сегментов, ориентированных относительно двух радиальных осей, являются измерительными электродами.
Применение радиальных электромагнитов специальной конструкции, имеющих магнитопроводы для размещения обмоток подмагничивания и обмоток управления.
Применение радиальных электромагнитов специальной конструкции, имеющих магнитопроводы для размещения обмоток подмагничивания и обмоток управления, обеспечивает минимальную магнитную связь между обмотками подмагничивания и управления.
Интегрированная конструкция радиальных электромагнитов с емкостными датчиками положения ротора дополнительно упрощает алгоритмы отладки контуров стабилизации АМП.
Применение начального подмагничивания в электромагнитах АМП дополнительно уменьшает индуктивность управляющих обмоток электромагнитов, тем самым способствует повышению быстродействия контуров стабилизации АМП.
Создание компактных модулей управления АМП и размещением их непосредственно в конструкции опор (или в непосредственной близости), позволяет отказаться от использования шкафа управления, что дополнительно обеспечит снижение помех в цепях управления АМП, а также влияние помех от АМП на окружающее оборудование.
Применение двухкоординатного емкостного датчика зазоров, выполненного в виде статора, либо с четырьмя рядами токопроводящих электродов, в двух из которых электроды являются токосъемными и выполнены в виде колец, а двух других рядах электроды являются измерительными и представляют собой изолированные полукольца, ориентированные относительно двух радиальных осей, либо с тремя рядами токопроводящих электродов, в двух из которых электроды являются токосъемными и выполнены в виде колец, а электроды третьего ряда являются измерительными и выполнены в виде четырех изолированных сегментов, ориентированных относительно двух радиальных осей, обеспечивает минимальное влияние на точность измерения электромагнитных полей.
Кроме того, целесообразность применения емкостного датчика зазоров мотивируется следующими преимуществами:
- достаточно большие диаметры конструкции радиальной опоры позволяют формировать большие площади электродов емкостного датчика;
- использование резонансных настроек контуров измерения зазоров позволяет получить высокую чувствительность датчика (включая микронные диапазоны измерений);
- в датчике обеспечивается малое влияние температурных факторов на точность измерения, поскольку чувствительными элементами датчика являются воздушные конденсаторы;
- элементы конструкции датчика не требует высокой точности их изготовления, так как осуществляется измерение среднего зазора под измерительными электродами, охватывающими почти половину (или четверть) диаметра ротора под каждым из диаметрально расположенных электродов.
Сущность изобретения поясняется графически, где:
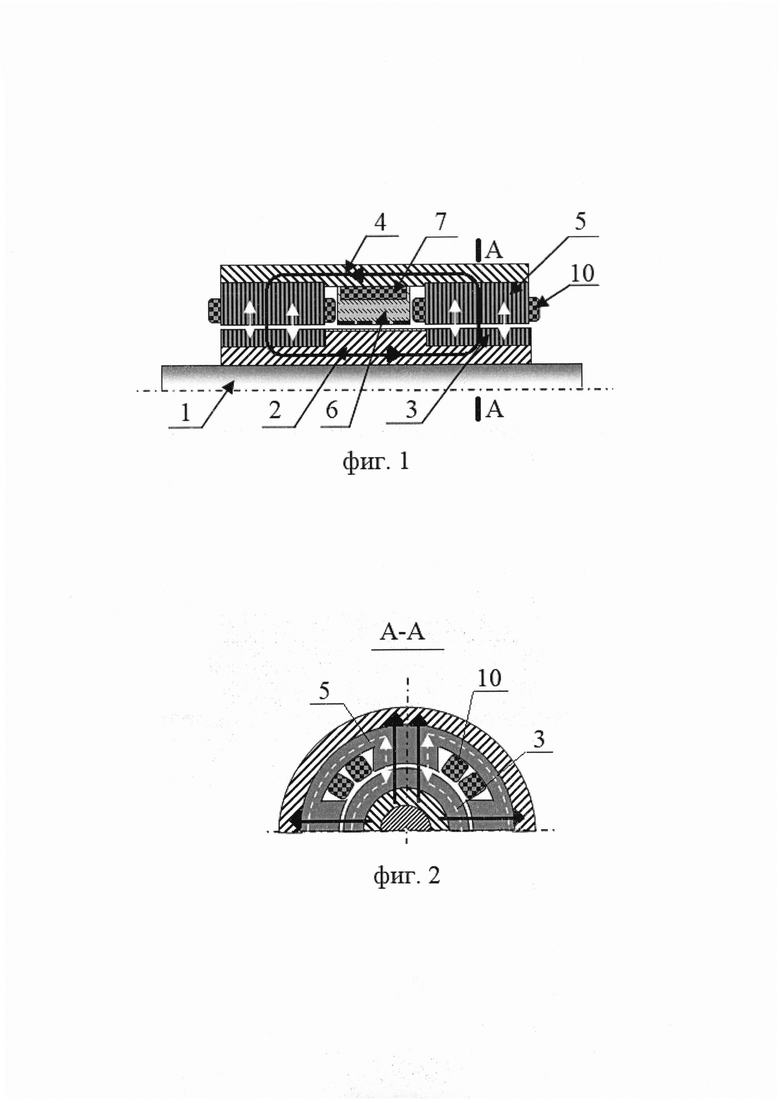
- на фиг. 1 изображен эскиз конструкции радиальной опоры;
- на фиг. 2 представлен разрез А-А фиг. 1;
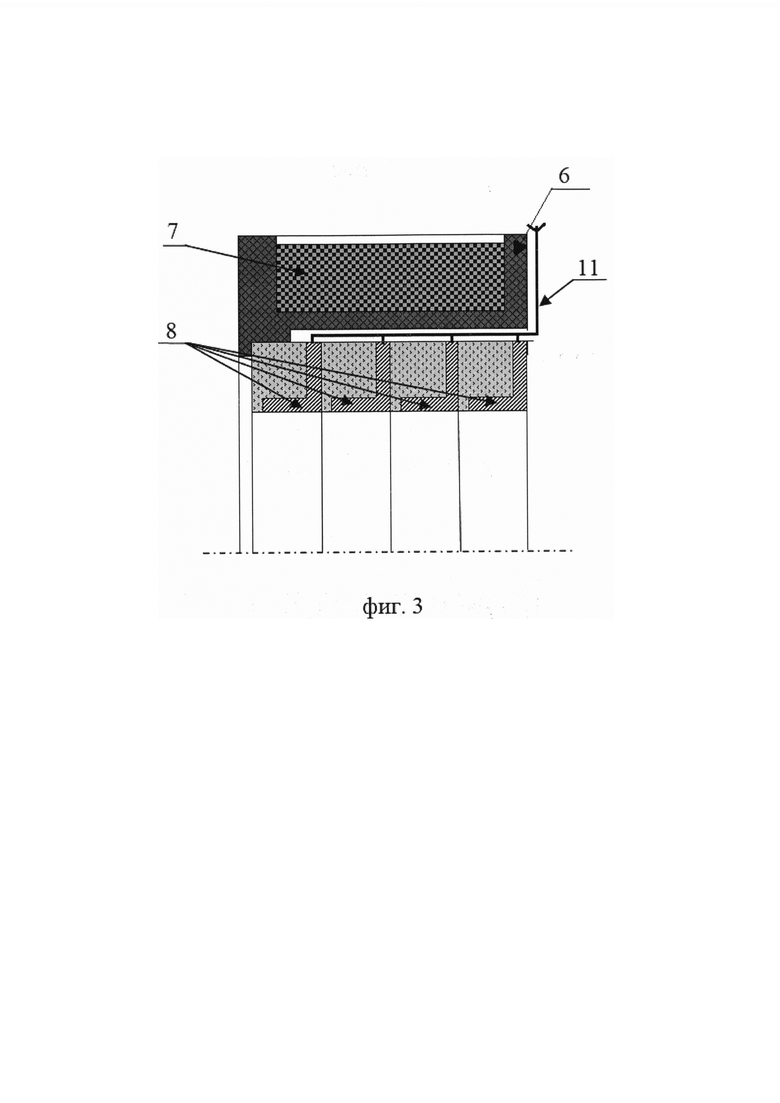
- на фиг. 3 представлен пример конструкции вкладыша с обмоткой подмагничивания и емкостным датчиком зазора;
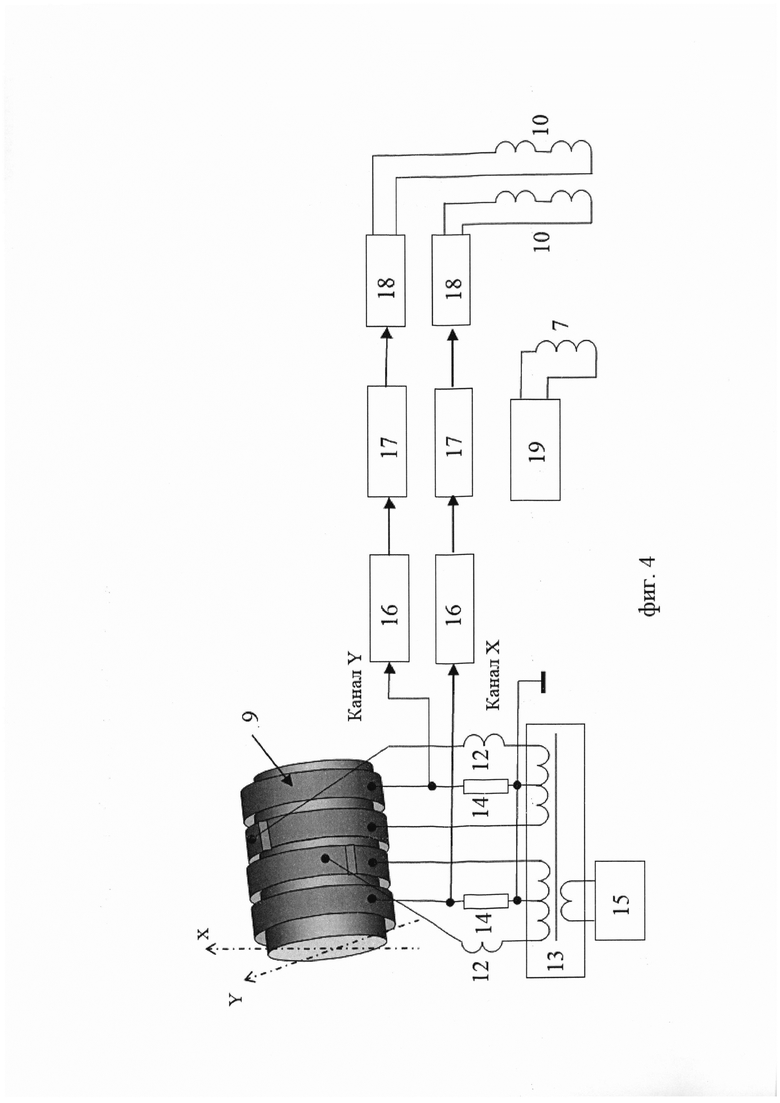
- на фиг. 4 изображена функциональная схема системы стабилизации радиальнойопоры; Радиальная опора (фиг. 1) содержит статор и ротор. Ротор представляет собой втулку 2, выполненную из низкоуглеродистой стали (магнитомягкого ферромагнитного материала), размещаемой на вращающемся валу 1. На втулке 2 размещены два ротора 3, представляющих собой цилиндрические пакеты из листов электротехнической стали.
Корпус 4 статора выполнен в виде полого цилиндра из низкоуглеродистой стали (магнитомягкого ферромагнитного материала). Внутри корпуса 4 статора установлены два статора 5 регулирующих электромагнитов и вкладыш 6, содержащий подмагничивающую обмотку 7 и электроды 8 статора емкостного датчика 9 зазоров. Статор 5 регулирующих электромагнитов содержит магнитопровод, в виде пакета электротехнической стали с четырьмя внутренними зубцами, на которых расположены четыре управляющих обмотки 10.
На фиг. 3 приведен пример конструктивного исполнения вкладыша 6 радиальной опоры с четырехрядным исполнением двухкоординатного емкостного датчика 9 зазора. На изолирующем каркасе вкладыша 6 расположена подмагничивающая обмотка 7. Внутри каркаса на изолирующих кольцах установлены четыре ряда токопроводящих электродов 8, причем электроды 8 в двух рядах выполнены в виде колец и являются токосъемными электродами, а электроды в двух других рядах выполнены в виде изолированных полуколец, ориентированных относительно двух радиальных осей, и являются измерительными электродами. Электроды 8 соединены проводами в виде жгута 11. Ротором емкостного датчика является втулка 2.
Возможно трехрядное исполнение конструкции электродов емкостного датчика зазоров, в которой средний ряд содержит четыре электрически изолированных сегмента электродов 8, ориентированных по радиальным осям.
Силы, удерживающие ротор в центральном положении, создаются за счет электромагнитного взаимодействия между зубцами статора 5 управляющих электромагнитов и их ротором 3 и определяются величиной индукции магнитного поля в зазорах между статором 5 и ротором 3. В предлагаемой радиальной опоре магнитное поле в зазорах управляющих электромагнитов формируется двумя контурами, - контуром подмагничивания (контур со стрелками темного цвета на фиг. 1) и контуром управляющих электромагнитов (контур со стрелками белого цвета на фиг. 1). Так, например, если в сечении управляющего электромагнита А-А (фиг. 2), дестабилизирующая сила действует вниз по вертикальной оси, то направление магнитного потока управляющих электромагнитов действует вверх, что приводит к увеличению магнитного потока (и магнитной индукции) в зазоре верхнего зубца статора 5 и уменьшению магнитного потока (и магнитной индукции) в зазоре нижнего зубца. В результате дестабилизирующая сила уравновешивается соответствующим изменением электромагнитных сил в зазорах между статором 5 и ротором 3 управляющих электромагнитов. Четырехполюсное исполнение статоров управляющих электромагнитов позволяет осуществлять стабилизацию ротора по двум взимоперпендикулярным осям (X и Y). Сигнал отклонения ротора формируется двухкоординатным емкостным датчиком 9 зазора.
Функциональная схема (фиг. 4) отражает состав и связи элементов системы стабилизации радиальной опоры.
Измерительные контуры каналов формирования сигналов по осям X и Y содержат воздушные емкости токосъемных и измерительных электродов емкостного датчика 9, катушки индуктивности 12, вторичные обмотки трансформатора 13 и сопротивления нагрузки 14, образующие дифференциальный мост. Первичная обмотка трансформатора 13 запитывается от задающего генератора 15. Настройка частоты задающего генератора 15 на резонанс измерительного контура позволяет получить высокую чувствительность каналов измерения зазоров вплоть до микронных диапазонов.
При отклонении ротора датчика 9 изменяются зазоры между электродами 8 и на сопротивлениях нагрузки 14 соответствующих каналов выделяются сигналы переменного напряжения, амплитуда которых пропорциональна величине отклонения ротора датчика 9 от центрального положения, а фаза напряжения соответствует направлению отклонения. Выделенные сигналы с соответствующих измерительных контуров поступают на входы фазочувствительных выпрямителей 16, затем сигналы поступают на фильтры динамической коррекции 17 и на усилители мощности 18, к которым подключены обмотки 10 управляющих электромагнитов 5.
Подмагничивающая обмотка 7 подключена к источнику постоянного тока 19.
Радиальные каналы АМП работают следующим образом.
При отклонении ротора по любой из радиальных осей, например, по оси +Х (фиг. 3) в двухкоординатном емкостном датчике воздушная емкость под верхним измерительным электродом увеличивается, а под нижним измерительным электродом уменьшается. Это приводит к появлению сигнала рассогласования в канале X стабилизации ротора, который после преобразований в фазочувствительном выпрямителе 16, фильтре динамической коррекции 17 и усилителе мощности 18 изменяет ток в обмотках 10 управляющих электромагнитов 5 так, чтобы результирующее усилие электромагнитной тяги приводило ротор в исходное положение.
| название | год | авторы | номер документа |
|---|---|---|---|
| Радиальная электромагнитная опора активного магнитного подшипника | 2020 |
|
RU2728916C1 |
| Вентильный электропривод | 1990 |
|
SU1758788A1 |
| ПОДШИПНИК СИСТЕМЫ ЭНЕРГОНЕЗАВИСИМОГО АКТИВНОГО МАГНИТНОГО ПОДВЕСА РОТОРА | 2003 |
|
RU2246644C1 |
| ТУРБОКОМПРЕССОР (ВАРИАНТЫ) | 2013 |
|
RU2559106C2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ НАСТРОЙКИ КОНТУРА ПАЦИЕНТА ПРИ УВЧ-ТЕРАПИИ | 1992 |
|
RU2012379C1 |
| МОТОР-КОЛЕСО | 2017 |
|
RU2673587C1 |
| ТУРБОГЕНЕРАТОР | 2006 |
|
RU2323344C1 |
| ОДНОФАЗНЫЙ БЕСКОНТАКТНЫЙ МАГНИТОЭЛЕКТРИЧЕСКИЙ ГЕНЕРАТОР | 2009 |
|
RU2393615C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ГИРОСКОП | 2015 |
|
RU2589939C1 |
| ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ | 2006 |
|
RU2322588C1 |
Изобретение относится к подшипниковым устройствам роторных машин и может использоваться в составе различных установок с быстровращающимся ротором, таких как турбоагрегаты, центробежные компрессоры и турбодетандеры, электродвигатели и электрогенераторы, и позволяет обеспечить минимальную магнитную связь между обмотками подмагничивания и управления. Радиальная опора для активного магнитного подшипника (АМП) содержит радиальный электромагнит с ротором в виде втулки (2) из магнитомягкого ферромагнитного материала, размещенной на вращающемся валу (1) и статором, выполненным в виде цилиндрического корпуса (4) из магнитомягкого ферромагнитного материала, внутри которого установлены два статора (5) регулирующих электромагнитов. На концах втулки (2) размещены два ротора (3) управляющих магнитов, выполненных в виде цилиндрических пакетов из листов электротехнической стали. Статоры (5) содержат магнитопроводы, выполненные из электротехнической стали в виде пакетов с четырьмя внутренними зубцами, на которых расположены четыре управляющих обмотки (10). Между статорами (5) регулирующих электромагнитов установлен вкладыш (6), содержащий подмагничивающую обмотку (7) и двухкоординатный емкостный датчик зазоров. Технический результат: обеспечение возможности применения радиальных электромагнитов специальной конструкции с пониженными требованиями к точности изготовления элементов опор и их взаимного расположения, снижении мощности выходных каскадов регуляторов тока радиальных каналов стабилизации АМП и возможности создания компактных электронных модулей, размещаемых в конструкции опор или в непосредственной близости к опорам. 2 з.п. ф-лы, 4 ил.
1. Радиальная опора для активного магнитного подшипника, содержащая радиальный электромагнит и двухкоординатный емкостный датчик зазоров, отличающийся тем, что статор радиального электромагнита выполнен в виде цилиндрического корпуса из магнитомягкого ферромагнитного материала, внутри которого установлены два статора регулирующих электромагнитов, содержащих магнитопроводы, выполненные из электротехнической стали в виде пакетов с четырьмя внутренними зубцами, на которых расположены четыре управляющих обмотки, и вкладыш, содержащий подмагничивающую обмотку и двухкоординатный емкостной датчик зазоров, установленный между статорами регулирующих электромагнитов, при этом ротор радиального электромагнита выполнен в виде втулки из магнитомягкого ферромагнитного материала, размещенной на вращающемся валу, на концах которой размещены два ротора управляющих магнитов, выполненных в виде цилиндрических пакетов из листов электротехнической стали.
2. Радиальная опора по п. 1, отличающаяся тем, что двухкоординатный емкостный датчик зазоров выполнен в виде статора с четырьмя рядами токопроводящих электродов, причем электроды в двух из них являются токосъемными электродами, выполненными в виде колец, а электроды в других двух рядах являются измерительными электродами, выполненными в виде изолированных полуколец, ориентированных относительно двух радиальных осей.
3. Радиальная опора по п. 1, отличающаяся тем, что двухкоординатный емкостный датчик зазоров выполнен в виде статора с тремя рядами токопроводящих электродов, причем электроды в двух рядах являются токосъемными электродами, выполненными в виде колец, а электроды третьего ряда являются измерительными электродами, выполненными в виде четырех изолированных сегментов, ориентированных относительно двух радиальных осей.
| МАГНИТНАЯ ОПОРА КОМПРЕССОРА | 2003 |
|
RU2251033C2 |
| ОПОРНЫЙ УЗЕЛ МАГНИТНОГО ПОДВЕСА РОТОРА | 2014 |
|
RU2577437C1 |
| АКТИВНЫЙ МАГНИТНЫЙ ПОДШИПНИК И СПОСОБ ОХЛАЖДЕНИЯ АКТИВНОГО МАГНИТНОГО ПОДШИПНИКА | 2017 |
|
RU2706854C1 |
| US 4121143 A, 17.10.1978. | |||

