Изобретение относится к машиностроению, в частности к магнитным подвесам, применяемым в различных высокооборотных электромеханических системах, и может найти применение в приборных гироскопах, насосах и т.д.
Известен магнитный подвес ротора электрошпинделя [1] В общем корпусе электрошпинделя с крышками с двух сторон вместе с приводным высокооборотным двигателем размещен магнитный подвес, состоящий из двух магнитных опор.
Первая магнитная опора, расположенная со стороны вала, на котором закреплен шлифованный диск, включает страховочный подшипник, запрессованный на внутреннем диаметре крышки электрошпинделя, расположенные внутри корпуса статор блока датчиков радиального положения ротора и статор радиального электромагнита с обмотками управления. Ротор первой магнитной опоры включает вал электрошпинделя, на который напрессованы ротор блока датчиков радиального положения ротора, ротор радиального электромагнита.
Вторая магнитная опора, расположенная на противоположном конце вала, включает начиная со стороны второй крышки корпуса электрошпинделя, страховочный подшипник, запрессованный на внутренней поверхности крышки электрошпинделя, расположенные внутри корпуса статоры двух осевых электромагнитов П-образного типа с обмотками управления, осевые датчики положения ротора, закрепленные на внутренней поверхности статоров осевых электромагнитов, статор блока датчиков радиального положения ротора, статор радиального электромагнита с обмотками управления. Ротор второй магнитной опоры включает вал электрошпинделя, на который напрессованы цилиндрический диск (ротор) осевых электромагнитов, расположенный между двумя статорами осевых электромагнитов, ротор датчиков радиального положения, ротор радиального электромагнита, причем ротором датчиков осевого положения является цилиндрический диск осевых электромагнитов.
В средней части корпуса электрошпинделя на его внутренней поверхности запрессован статор высокооборотного двигателя с обмоткой управления, а на средней части вала электрошпинделя расположен напрессованный ротор двигателя.
Такое расположение всех узлов электрошпинделя в едином корпусе усложняет их замену, связанную с разборкой рабочей машины.
Известен магнитный подвес для газоперекачивающего агрегата [2] состоящий из цилиндрического корпуса с крышкой, на внутренней поверхности которого, начиная с крышки корпуса, установлен фланец с запрессованными в него двумя страховочными подшипниками; два статора осевых цилиндрических электромагнитов Ш-образного типа с обмотками управления; статор блока датчиков радиального положения ротора; статор радиального электромагнита с обмотками управления.
К фланцу магнитного подвеса со стороны крышки прикреплен цилиндр с буртиком, в котором расположены датчики осевого положения ротора, причем рабочие поверхности датчиков перпендикулярны оси вала. Статор блока датчиков радиального положения ротора так же как и статор радиального электромагнита установлены с натягом в корпусе магнитного подвеса.
Ротор магнитного подвеса включает вал, на котором, начиная с его конца, последовательно расположены ротор осевых датчиков положения, втулка страховочных подшипников, диск (ротор) осевых электромагнитов, ротор блока датчиков радиального положения ротора и ротор радиального электромагнита.
В данном магнитном подвесе ротором для датчиков осевого положения является втулка, установленная на конце вала, а ротор радиальных датчиков положения и радиального электромагнита выполнены в общем цилиндре. Диск (ротор) осевых электромагнитов установлены с натягом на втулке, неподвижной относительно вала. Для исключения осевого смещения детали ротора фиксируются на конце вала стопорной шайбой и гайкой.
Втулка страховочных подшипников исключает касание статорных и роторных частей магнитного подвеса при его отключении.
Однако при выходе из строя осевого электромагнита, расположенного за диском, или датчиков радиального положения ротора [1] и осевого датчика, расположенного за диском, или радиального электромагнита для их замены, или замены всего корпуса магнитного подвеса [2] необходимо снятие осевого диска, установленного с натягом на валу, что значительно усложняет быструю разборку подвеса.
Сборка же этих магнитных подвесов после замены вышедших из строя узлов также сопряжена с рядом трудностей: для повторной посадки диска на вал требуется механическая обработка как вала, так и поверхностей посадки диска, что увеличивает время сборки, а в машинах, таких как, например, газоперекачивающие агрегаты или конвейеры заводов, в которых установлены электрошпиндели, остановка их допустима лишь на короткое время. Кроме этого, при повторной установке диска он своей активной поверхностью устанавливается несоосно относительно активных поверхностей осевых электромагнитов, что приводит к ухудшению технических характеристик осевой опоры магнитного подвеса.
Иногда при снятии диска с вала происходит повреждение его активной поверхности, что требует его замены и усложняет ввод в эксплуатацию магнитного подвеса.
В приведенных магнитных подвесах отсутствует возможность механического регулирования радиальных датчиков положения ротора, так как при установке его на работающей машине они расположены вне зоны доступа.
Задачей изобретения является возможность быстрой полной замены корпуса магнитного подвеса без разборки ротора; быстрой частичной замены вышедших из строя узлов магнитного подвеса, расположенных в цилиндрическом корпусе, без разборки ротора; механической регулировки датчиков положения ротора.
Поставленная задача решается тем, что в магнитном подвесе ротора устройства, содержащего размещенные в цилиндрическом корпусе радиальную и аксиальную электромагнитные опоры, блоки аксиальных и радиальных датчиков положения ротора, закрепленный на корпусе съемный фланец, страховочный подшипник, причем статоры радиальной опоры и первый статор аксиальной опоры, содержащей ротор дискообразной формы, расположенный между ее первым и вторым статорами, установлены вместе с обмотками управления на внутренней стенке цилиндрического корпуса, отличающийся тем, что статоры и ротор аксиальной опоры расположены со стороны соединения цилиндрического корпуса с корпусом устройства, так что второй ее статор закреплен на последнем, аксиальные и радиальные датчики положения ротора расположены со стороны фланца в зоне соединения последнего с цилиндрическим корпусом, причем одна часть аксиальных и радиальных датчиков положения установлена с возможностью регулировки на общем элементе, закрепленном на внутренней стенке цилиндрического корпуса, и другая их часть установлена также на общем элементе, выполненном в виде втулки с буртом, закрепленной на роторе устройства, а фланец выполнен со сквозными отверстиями и съемной крышкой, фиксирующей страховочный подшипник, смонтированный внутри фланца на роторе устройства.
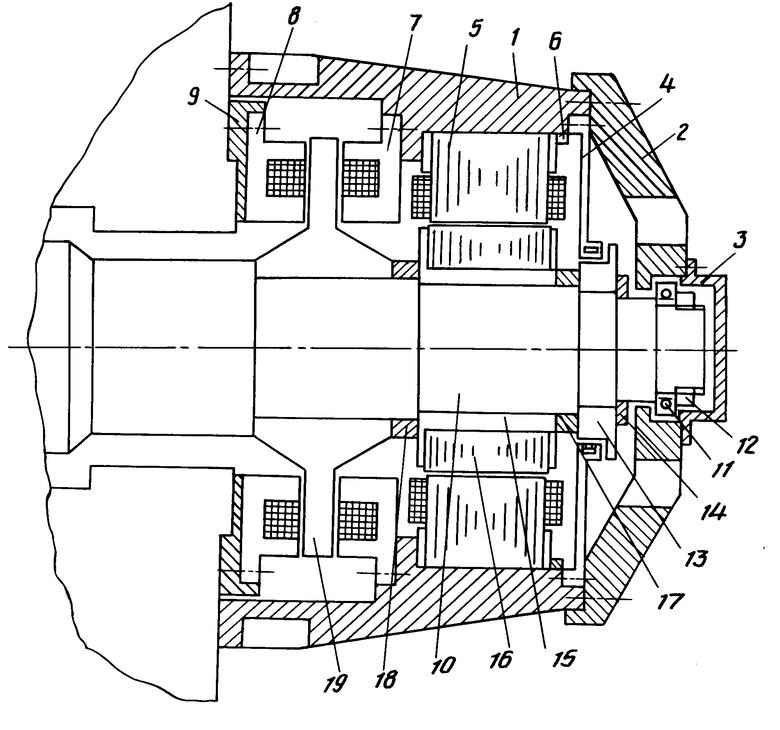
На чертеже изображен предлагаемый магнитный подвес ротора устройства.
Он содержит цилиндрический корпус 1, который съемно крепят на корпусе изделия. На торцовой поверхности корпуса, противоположной поверхности крепления к изделию, установлен фланец с буртиком (торцом) 2, выполненный в виде двух половин с поверхностью разъема по диаметру, со сквозными отверстиями для доступа к статору блока датчиков. К фланцу со стороны, противоположной соединению его с корпусом подвеса, крепится крышка страховочного подшипника 3, удерживающая ротор от осевых перемещений. Внутри корпуса последовательно установлены общий элемент 4, на котором расположена регулируемая часть датчиков радиального и осевого положения ротора, статор радиального электромагнита с обмотками 5 управления, упираемый в буртик цилиндра магнитного подвеса и фиксированный от осевых перемещений стопорным кольцом 6, статор одного из осевых электромагнитов 7, обращенный активной поверхностью к корпусу изделия.
Статор второго осевого электромагнита 8 закреплен через немагнитную прокладку 9 на корпусе изделия и обращен активной поверхностью в противоположную от него сторону.
Ротор магнитного подвеса содержит часть вала устройства 10, на котором последовательно установлены с натягом страховочный подшипник 11, упираемый в буртик вала и фиксированный гайкой 12, ответную часть осевых и радиальных датчиков 13 положения, установленную на общем элементе, выполненном в виде втулки с буртом, закрепленном на роторе устройства, упираемую в буртик вала и фиксированную от осевых перемещений стопорным кольцом 14, втулка 15 с запрессованным в нее ротором радиального электромагнита 16, упираемую в буртик вала и фиксированную в осевом направлении кольцом 17, переходную втулку 18, прижимающую диск (ротор) осевого электромагнита 19, посаженного с натягом на вал, упираемый в буртик вала, и расположенный между двумя статорами осевого электромагнита.
Работа магнитного подвеса ротора устройства осуществляется следующим образом. В начальный момент времени (ротор лежит на страховочных подшипниках) необходимо осуществить подвес ротора в центральное положение. Для этого от электронного блока на обмотки управления радиального электромагнита 5 подается такое напряжение питания, которое удерживает ротор в центральном положении, причем работают те обмотки управления, которые создают электромагнитную силу, направленную в противоположную сторону действия веса ротора.
При отклонении ротора от центрального положения по сигналам от радиальных датчиков положения, электронный блок вырабатывает такое напряжение питания, подаваемое на обмотки радиальных электромагнитов, которое необходимо для того, чтобы вернуть ротор в центральное положение. По осевому направлению магнитный подвес работает аналогично радиальному, т.е. при смещении ротора в осевом направлении электронный блок по сигналам от осевых датчиков положения вырабатывает такое напряжение питания, подаваемое на обмотки осевых электромагнитов (7 и 8), которое необходимо для возвращения ротора в центральное положение.
При центральном положении ротора и действии нагрузки (как в осевом, так и в радиальном направлении) электронный блок вырабатывает такое напряжение питания, подаваемое на обмотки электромагнитов, которое пропорционально величине нагрузки для удержания ротора в центральном положении.
При работе такого магнитного подвеса наибольшим отказом подвержены его токоведущие узлы, расположенные в корпусе: радиальные и осевые электромагниты, а также датчики положения ротора, у которых из строя выходят обмотки. Это связано с тем, что через обмотки управления электромагнитов в длительном режиме эксплуатации протекают большие токи, обусловленные значительными нагрузками, воспринимаемыми электромагнитами при работе, например, шпинделей с большим усилием прижатия при шлифовании или в газоперекачивающих агрегатах с высоким давлением (напором) перекачивающего газа. В этих условиях происходит нарушение изоляции токоведущих узлов и выход их из строя, что требует частой их замены.
Для быстрого устранения неисправностей токоведущих узлов магнитного подвеса производят замену корпуса 1, внутри которого находятся элемент 4, содержащий одну из частей регулируемых датчиков радиального и осевого положения ротора статор радиального электромагнита с обмотками управления 5, статор осевого электромагнита 7, после снятия крышки страховочного подшипника 3 и фланца 2.
Для частичной замены вышедших из строя токоведущих узлов, расположенных в корпусе, в частности датчиков положения ротора, статора радиального электромагнита снимают крышку страховочного подшипника 3, разборный фланец 2. Если вышел из строя элемент с датчиками 4, его снимают и заменяют в нем датчик на новый, если вышел из строя статор радиального электромагнита с обмотками управления 5, то после снятия фланца 2 и элемента с датчиками 4 снимают стопорное кольцо 6 и статор радиального электромагнита 5 заменяют на новый.
При выходе из строя осевого электромагнита 7, расположенного на корпусе магнитного подвеса, сначала снимают крышку страховочного подшипника 3 и фланец 2, затем отсоединяют корпус магнитного подвеса от корпуса изделия. Производят замену вышедшего из строя статора электромагнита 7 в корпусе магнитного подвеса 1, который снова крепят к корпусу изделия.
Таким образом, расположение двух статоров осевых электромагнитов с обмотками управления и диском (ротором) в цилиндрическом корпусе магнитного подвеса со стороны соединения его с корпусом изделия позволяет осуществить быструю полную замену корпуса магнитного подвеса, быструю частичную замену вышедших из строя узлов магнитного подвеса, расположенных в его корпусе, без разборки ротора, а расположение датчиков положения ротора в непосредственной близости от фланца и прямой доступ к ним через сквозные отверстия этого фланца дает возможность механической регулировки этих датчиков положения ротора.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТНАЯ ОПОРА | 1997 |
|
RU2115835C1 |
| ГИБРИДНЫЙ МАГНИТНЫЙ ПОДШИПНИК С ОСЕВЫМ УПРАВЛЕНИЕМ | 2013 |
|
RU2540215C1 |
| ПОДШИПНИК СИСТЕМЫ ЭНЕРГОНЕЗАВИСИМОГО АКТИВНОГО МАГНИТНОГО ПОДВЕСА РОТОРА | 2003 |
|
RU2246644C1 |
| МАГНИТНАЯ ОПОРА ДЛЯ АГРЕГАТА | 1997 |
|
RU2129228C1 |
| ВЫСОКОСКОРОСТНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА С ВЕРТИКАЛЬНЫМ ВАЛОМ | 2013 |
|
RU2540696C1 |
| Электрошпиндель с магнитным подвесом ротора | 1988 |
|
SU1575270A1 |
| ОПОРНЫЙ УЗЕЛ МАГНИТНОГО ПОДВЕСА РОТОРА | 2014 |
|
RU2577437C1 |
| УПРАВЛЯЕМЫЙ МАГНИТНЫЙ ПОДШИПНИК НА ПОСТОЯННЫХ МАГНИТАХ И СПОСОБ УПРАВЛЕНИЯ ИМ | 2013 |
|
RU2563884C2 |
| Шпиндель металлорежущего станка | 1974 |
|
SU1386416A1 |
| ШПИНДЕЛЬ | 2008 |
|
RU2370344C1 |
Использование: для поддержания и центрирования ротора устройства, например компрессора, нагнетателя и т. д. Сущность изобретения: магнитный подвес ротора устройства содержит размещенные в цилиндрическом корпусе радиальную и аксиальную электромагнитные опоры, блоки аксиальных и радиальных датчиков положения ротора, закрепленный на корпусе съемный фланец для фиксации осевого положения страховочного подшипника, смонтированного внутри фланца. Аксиальная опора выполнена в виде двух статоров с обмотками управления, один из которых закреплен на внутренней стенке корпуса, а другой - на устройстве, и ротора, сделанного в виде диска, установленного между ними с зазором. Радиальная опора выполнена в виде коаксиально установленных статора, закрепленного на корпусе, и ротора, установленного на роторе устройства. Одна часть датчиков радиального и аксиального положения ротора устройства установлена на общем элементе, закрепленном на внутренней стенке корпуса, а взаимодействующая с ними другая их часть установлена также на общем элементе, выполненном в виде втулки с буртом, расположенной на роторе устройства. Фланец сделан со сквозными отверстиями для доступа к датчикам положения при их регулировке.Такая конструкция подвеса позволяет осуществить его быструю разборку и сборку для замены вышедших из строя элементов, а также необходимую регулировку без его разборки. 1 ил.
МАГНИТНЫЙ ПОДВЕС РОТОРА УСТРОЙСТВА, содержащий размещенные в цилиндрическом корпусе радиальную и аксиальную электромагнитные опоры, блоки аксиальных и радиальных датчиков положения ротора, закрепленный на корпусе съемный фланец, страховочный подшипник, причем статор радиальной опоры и первый статор аксиальной опоры, содержащей ротор дискообразной формы, расположенный между ее первым и вторым статорами, установлены вместе с обмотками управления на внутренней стенке цилиндрического корпуса, отличающийся тем, что статоры и ротор аксиальной опоры расположены со стороны соединения цилиндрического корпуса с корпусом устройства, так что второй ее статор закреплен на последнем, аксиальные и радиальные датчики положения ротора расположены со стороны фланца в зоне соединения последнего с цилиндрическим корпусом, причем одна часть аксиальных и радиальных датчиков положения установлена с возможностью регулировки на общем элементе, закрепленном на внутренней стенке цилиндрического корпуса, а другая их часть установлена также на общем элементе, выполненном в виде втулки с буртом, закрепленной на роторе устройства, а фланец выполнен со сквозными отверстиями и съемной крышкой, фиксирующей страховочный подшипник, смонтированный внутри фланца на роторе устройства.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Проспект фирмы Novacorp International | |||
| Activ magnetic bearing systems", 1989. | |||
