Изобретение относится к ультразвуковой технике,а именно к технике и устройствам для ультразвуковой обработки изделий, и может быть использовано в машиностроительной, электронной и других отраслях, связанных с ультразвуковой очисткой или травлением объектов в различных технологических средах.
Известны способ и устройство для обработки изделий в ультразвуковом поле, воз- буждэемом пьезоэлектрическими преобразователями, питаемыми каждый от своего инвертора и настраиваемыми на его резонансную частоту. Известное техническое решение позволяет получить высокое значение мощности, отдаваемой в нагрузку.
Недостатками известных способа и устройства для обработки изделий в ультразвуковом поле являются низкая эффективность и сложная аппаратурная реализация, обус- ловленные неравномерностью излучаемой мощности от каждого преобразозателя вследствие различия их КПД. Кроме того, устройство трудоемко в настройке инвертора на рабочую частоту, а также необходима перенастройка инвертора при смене преобразователей, что требует значительных временных затрат.
Наиболее близким к предлагаемым является способ и устройство для обработки изделий в ультразвуковом поле, возбуждаемом льезопреобразователями, питаемыми от одного источника путем девиации частоты ультразвуковых колебаний.
Недостатками известных способа и уст- ройства являются низкая эффективность и равномерность излучения каждым преобразователем вследствие того, что не все время обработки преобразователи работают на их резонансной частоте и при максимальной амплитуде механических колебаний.
В случае использования высокодобротных пьезоэлектрических преобразователей частотный диапазон A f, в котором работа отдельного преобразователя наиболее эф- фективна, т.е. амплитуда колебаний имеет максимальное или близкое к нему значение (обычно А 0,7 Амакс), очень узок. Резонансные частоты отдельных преобразователей отличаются один от другой на величину Д F большую, чем диапазонА
Таким образом, при возбуждении ультразвуковых преобразователей путем девиации частоты текущая частота инвертора большую часть времени обработки находит-
и /2 ,
ся вче диапазона (fp, + -у-,) и, следовательно, все это время амплитуда колебаний всех преобразователей (а значит и излучаемая
мощность) имеет значение намного меньше максимально возможного, причем, чем выше добротность используемых преобразователей и выше частота девиации, тем меньшую часть времени обработки частота инвертора будет удовлетворять условию f fpi + Afj/2, т.е. с меньшей эффективностью работают пьезопреобразователи.
Стабилизация выходного напряжения инвертора также не позволяет в полной мере решить задачу обеспечения равномерности излучения ультразвуковой энергии каждым преобразователем из-за различия их акустико-механических характеристик что ухудшает качество обработки всей поверхности изделия. Кроме того, способ, основанный на девиации частоты, не позволяет избирательно обрабатывать определенные зоны объекта, что также ухудшает качество обработки, требуется значительно больше времени обработки особо загрязненных участков или поверхности сложной конфигурации.
Целью изобретения является повышение качества и сокращение времени ультразвуковой обработки за счет повышения эффективности и равномерности излучения каждым преобразователем путем обеспечения их работы на резонансной частоте и максимальней амплитуде колебаний.
Цель достигается тем, что в способе обработки изделий посредством ультразвукового поля возбуждают N ультразвуковых преобразователей, питаемых от одного источника, путем девиации частоты ультразвуковых колебаний отдельных пьезоп- реобразователей, девиацию частоты ультразвуковых колебаний осуществляют дискретно от одного преобразователя к другому, предварительно определяя для каждого из них зону обработки и интервал времени интенсивной его работы, при этом последовательно в течение каждого интервала времени осуществляют подстройку частоты источника на резонансную частоту каждого пьезопреобразователя, а амплитуду механических колебаний каждого из них поддерживают на заданном уровне, а именно стабилизируют в интервале времени, когда частота инвертора равна его собственной частоте, а в устройстве, содержащем управляемый инвертор, нагруженный на N ультразвуковых пьезопреобразователей, каждый из которых включает силовой пакет, частотный модулятор, вход которого подключен к первому входу управляемого инвертора, управляемый мост, выход которого подключен ко второму входу управляемого инвертора, и датчик фазы, каждый пьезоп- реобразователь снабжен пакетом обратной
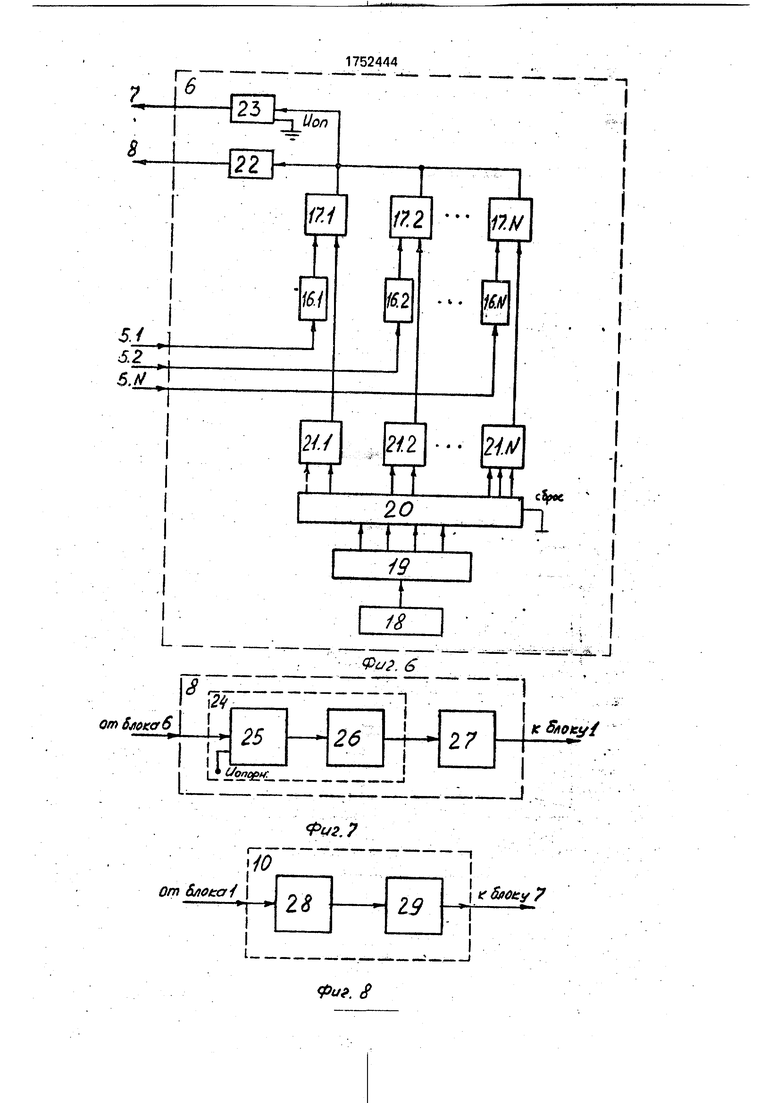
связи, а устройство снабжено коммутирующим преобразователем и формирователем импульсов, при этом выход управляемого инвертора дополнительно соединен с первым входом датчика фазы, выходы каждого пьезопреобразователя соединены с группой входов коммутирующего преобразователя, цифровой выход которого соединен с вторым входом датчика фазы, а аналоговый выход - с входом управляемого обратного моста, выход датчика фазы соединен с входом частотного модулятора. Кроме того, коммутирующий преобразователь состоит из мультивибратора, двоичного счетчика, дешифратора, переключателей, аналоговых ключей и резистивных делителей напряжения по числу пьезопреобразователей, линейного усилителя и компаратора, при этом выход мультивибратора соединен с входом двоичного счетчика, выходы которого сое- динены с входами дешифратора, выходы пакетов обратной связи каждого пьезопреобразователя подключены к входам соответствующих резистивных делителей напряжения, выходы каждого из которых подключены к первому входу соответствующего аналогового ключа, второй вход каждого из которых подключен к выходу соответствующего переключателя, а выходы соединены с входами усилителя линей- ного и компаратора.
Введение в конструкцию устройства коммутирующего преобразователя и формирователя импульсов позволило осуществлять подстройку частоты инвертора на резонансную частоту каждого отдельного пьезопреобразователя, снабженного пакетом обратной связи, определять интервал времени обработки соответствующих зон, что обеспечивает высокие качества и скоро- сть обработки изделий, имеющих различную степень загрязнения и сложную конфигурацию.
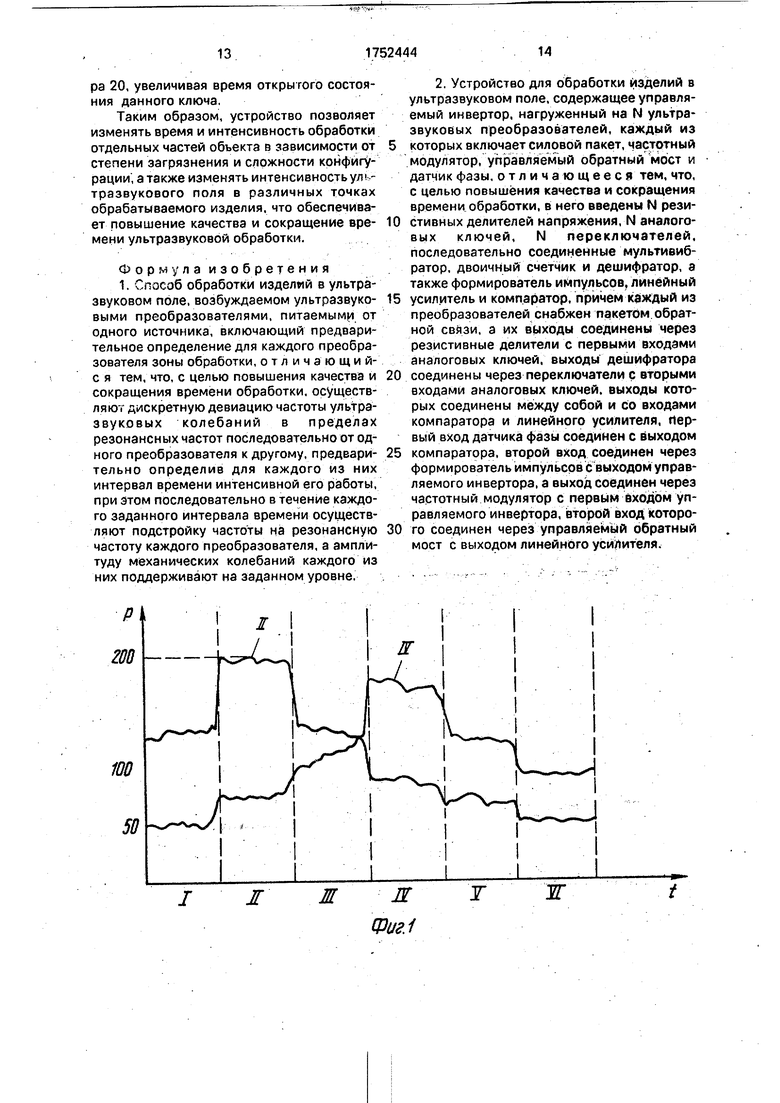
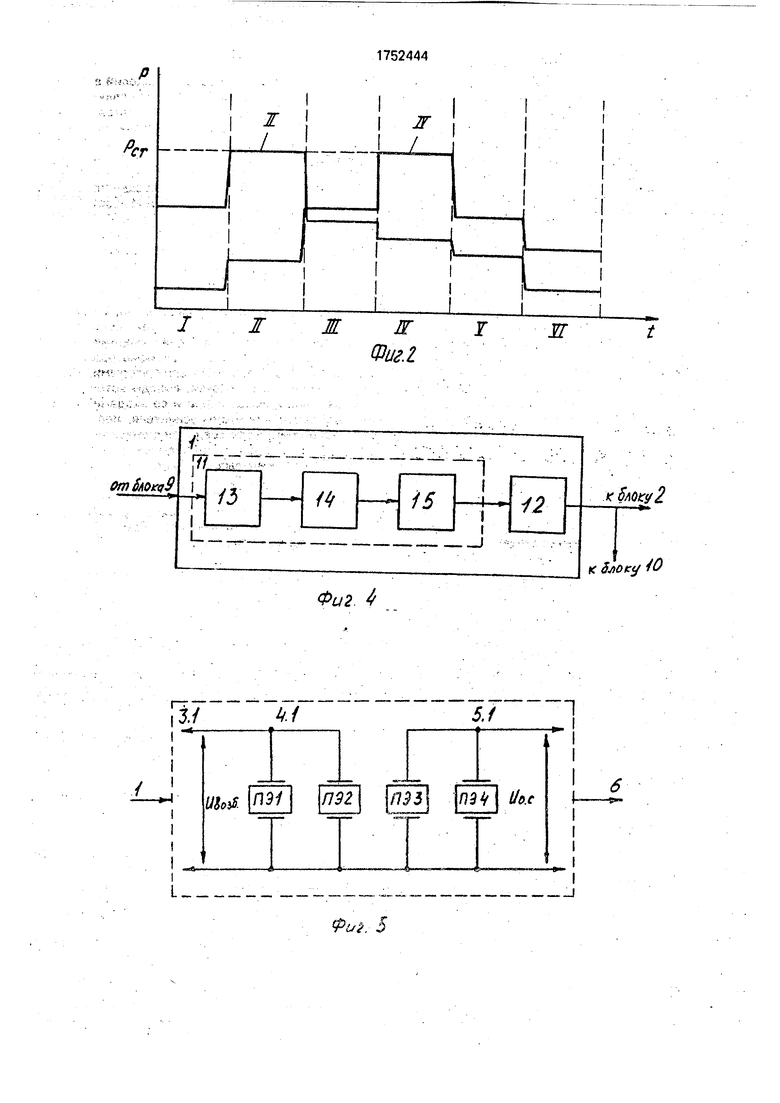
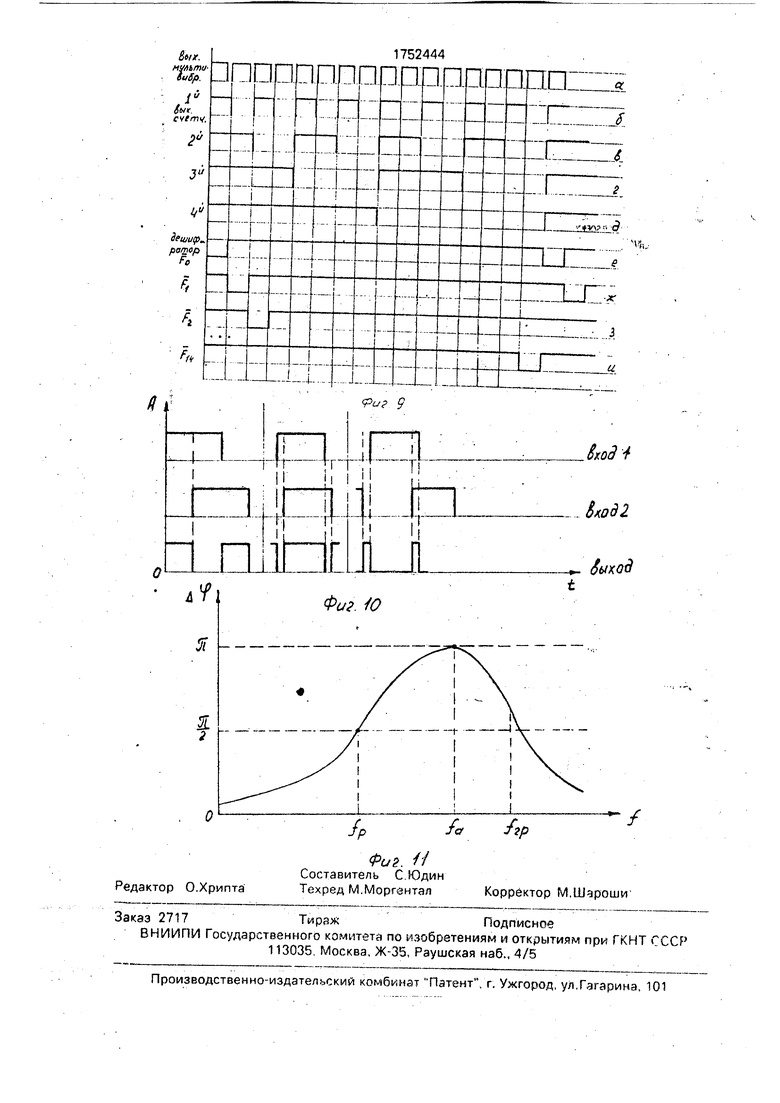
На фиг. 1 представлена зависимость мощности, излучаемой пьезопреобразова- телями, от времени обработки; на фиг. 2 - то же, при введении стабилизации амплитуды; на фиг. 3 - структурная схема устройства; на фиг. 4 - блок управляемого инвертора; на фиг. 5 - отдельный пьезопре- образователь; на фиг. 6 - блок коммутации; на фиг. 7 - блок управляемого обратного моста; на фиг. 8 - формирователь импульсов; на фиг. 9 - временные диаграммы, поясняющие работу мультивибратора, двоичного счетчика и дешифратора; на фиг. 10 - временные диаграммы, поясняющие работу датчика фазы для трех возможных по частоте случаев; на фиг. 11 - частотно-фазовые характеристики датчика фазы.
Сущность предлагаемого способа и эффективность его применения для обработки объектов сложной конфигурации заключается в следующем.
Общее время работы любого из N преобразователей, входящих в систему для обработки объекта, складывается из времени tpea., когда частота ультразвукового инвертора совпадает с собственной резонансной частотой этого преобразователя, и времени
t Е.
U1..(N-1)
состоящего из (N-1) интервала, в течение каждого из которых частота ультразвукового инвертора автоматически настраивается на резонансную частоту соответствующего преобразователя. При этом амплитуда колебаний преобразователя также изменяется от интервала к интервалу, имея максимальное значение на его собственной резонансной частоте и минимальное во время работы инвертора на резонансной частоте преобразователя, разброс резонансных частот с которым имеет максимальное значение. Так как мощность, излучаемая преобразователем в нагрузку, прямо пропорциональна амплитуде его механических колебаний, то зависимость изменения излучаемой мощности от времени будет аналогична изменению амплитуды. Зависимость изменения мощности, излучаемой в нагрузку, от времени обработки представлена на фиг, 1.
Излучаемая мощность максимальна при работе на резонансной частоте преобразователя и значительно снижается при удалении частоты инвертора от этой частоты. Кроме того, в течение каждого интервала значение мощности непостоянно. Это объясняется изменением сопротивления нагрузки вследствие наличия возмущений жидкости, изменения ее температуры и других внешних причин. На величину мощности, излучаемой преобразователем на его резонансной частоте, влияет также КПД данного преобразователя. Поэтому преобразователь II в течение интервала времени II отдает в нагрузку мощность значительно большую, нежели преобразователь IV в течение интервала времени IV. Для исключения этого осуществляют стабилизацию амплитуды колебаний преобразователя в интервале времени, когда частота инвертора равна его собственной резонансной частоте. Тогда графики, приведенные на фиг. 1, принимают вид, показанный на фиг. 2, Работа, совершаемая преобразователями за время tg. для каждого из N преобразователей, оказывается примерно одинаковой. Доля работы за интервал tpea оказывается для всех преобразователей равной и составляет примерно 30- 35% от общей. Таким образом, в случае равенства времени грез. для всех преобразователей все они отдают в нагрузку примерно равное количество энергии. Увеличивая время Грез, для одного или нескольких преобразователей, можно добиться перераспределения энергии, отданной в нагрузку преобразователями, что делает возможным повышение интенсивности обработки зон объекта, расположенных в непосредственной близости от этих преобразователей.
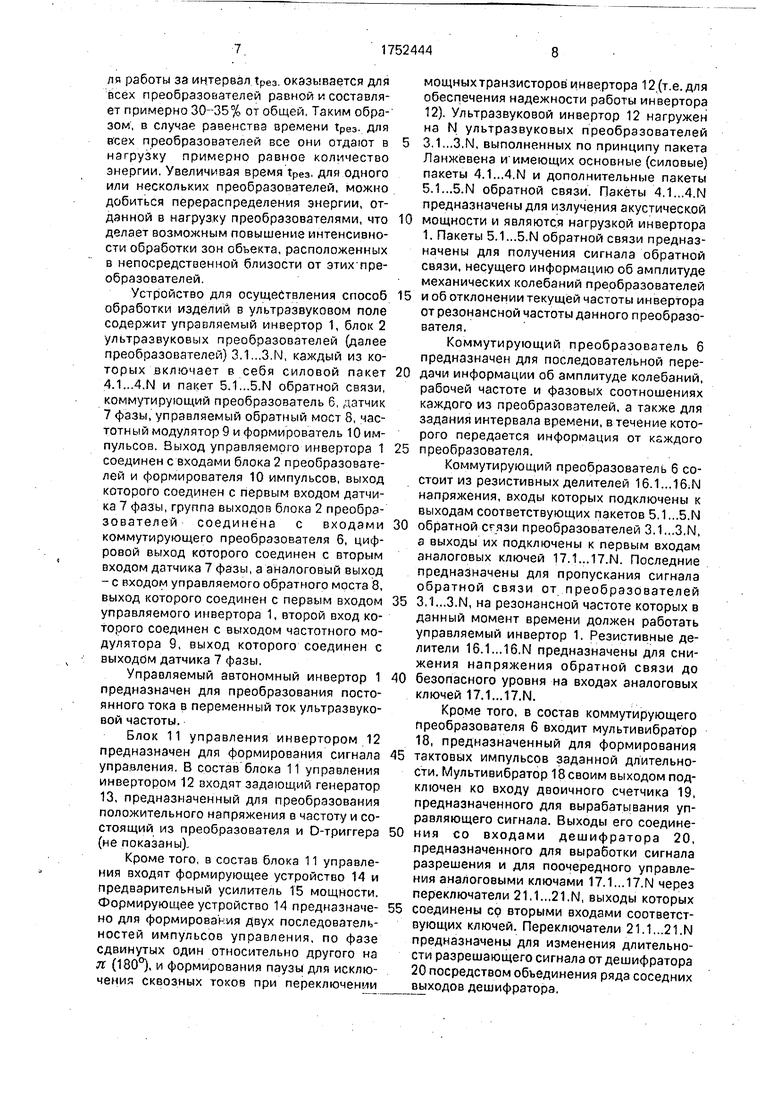
Устройство для осуществления способ обработки изделий в ультразвуковом поле содержит управляемый инвертор 1, блок 2 ультразвуковых преобразователей (далее преобразователей) 3.1...3.N, каждый из которых включает в себя силовой пакет 4.1...4.N и пакет 5.1...5.N обратной связи, коммутирующий преобразователь б, датчик 7 фазы, управляемый обратный мост 8, частотный модулятор 9 и формирователь 10 импульсов. Выход управляемою инвертора 1 соединен с входами блока 2 преобразователей и формирователя 10 импульсов, выход которого соединен с первым входом датчика 7 фазы, группа выходов блока 2 преобразователей соединена с входами коммутирующего преобразователя б, цифровой выход которого соединен с вторым входом датчика 7 фазы, а аналоговый выход - с входом управляемого обратного моста 8, выход которого соединен с первым входом управляемого инвертора 1, второй вход которого соединен с выходом частотного модулятора 9, выход которого соединен с выходом датчика 7 фазы.
Управляемый автономный инвертор 1 предназначен для преобразования постоянного тока в переменный ток ультразвуковой частоты.
Блок 11 управления инвертором 12 предназначен для формирования сигнала управления, В состав блока 11 управления инвертором 12 входят задающий генератор 13, предназначенный для преобразования положительного напряжения в частоту и состоящий из преобразователя и D-триггера (не показаны).
Кроме того, в состав блока 11 управления входят формирующее устройство 14 и предварительный усилитель 15 мощности. Формирующее устройство 14 предназначено для формирования двух последовательностей импульсов управления, по фазе сдвинутых один относительно другого на п (180°), и формирования паузы для исключения сквозных TOKOS при переключении
мощных транзисторов инвертора 12 (т.е. для обеспечения надежности работы инвертора 12), Ультразвуковой инвертор 12 нагружен на N ультразвуковых преобразователей
3.1...3.N, выполненных по принципу пакета Ланжевена и имеющих основные (силовые) пакеты 4.1...4.N и дополнительные пакеты 5.1...5.N обратной связи. Пакеты 4.1...4.N предназначены для излучения акустической
0 мощности и являются нагрузкой инвертора 1. Пакеты 5.1...5.N обратной связи предназначены для получения сигнала обратной связи, несущего информацию об амплитуде механических колебаний преобразователей
5 и об отклонении текущей частоты инвертора от резонансной частоты данного преобразователя,
Коммутирующий преобразователь 6 предназначен для последовательной пере0 дачи информации об амплитуде колебаний, рабочей частоте и фазовых соотношениях каждого из преобразователей, а также для задания интервала времени, в течение которого передается информация от каждого
5 преобразователя.
Коммутирующий преобразователь 6 состоит из резистивных делителей 16.1...16.N напряжения, входы которых подключены к выходам соответствующих пакетов 5.1...5.N
0 обратной сгязи преобразователей 3.1...3.N, а выходы их подключены к первым входам аналоговых ключей 17.1...17.N. Последние предназначены для пропускания сигнала обратной связи от преобразователей
5 3.1...3.N, на резонансной частоте которых в данный момент времени должен работать управляемый инвертор 1. Резистивные делители 16.1...16.N предназначены для снижения напряжения обратной связи до
0 безопасного уровня на входах аналоговых ключей 17.1...17.N.
Кроме того, в состав коммутирующего преобразователя б входит мультивибратор 18, предназначенный для формирования
5 тактовых импульсов заданной длительности. Мультивибратор 18 своим выходом подключен ко входу двоичного счетчика 19, предназначенного для вырабатывания управляющего сигнала. Выходы его соедине0 ния со входами дешифратора 20, предназначенного для выработки сигнала разрешения и для поочередного управления аналоговыми ключами 17.1...17.N через переключатели 21.1.,.21.N, выходы которых
5 соединены со вторыми входами соответствующих ключей. Переключатели 21.1...21.N предназначены для изменения длительности разрешающего сигнала от дешифратора 20 посредством объединения ряда соседних выходов дешифратора,
Выходы аналоговых ключей 17.1...17.N соединены с входами линейного усилителя 22 и компаратора 23. При этом выход усилителя 22 соединен с входом управляемого обратного моста 8, а выход компаратора 23 подключен к второму входу датчика 7 фазы. Аналоговый усилитель 22 предназначен для передачи информации об изменении амплитуды сигнала обратной связи и для согласования выхода ключей 17.1...17.N с входом датчика 7 фазы, что необходимо для неискаженной передачи изменений аналогового сигнала обратной связи.
-Коммэрь. ор 23 предназначен для преобразования аналогового сигнала в последовательность импульсов и для сравнения входного сигнала с опорным напряжением нулевого уровня.
Датчик 7 фазы предназначен для формирования последовательности импульсов, длительность которых является функцией фазового сигнала ошибки, т.е. отклонением фазового сдвига между напряжением возбуждения преобразователя и напряжением сигнала обратной связи от определенного значения, соответствующего резонансной частоте преобразователя.
Управляемый обратный мост 8 предназначен для получения постоянного напряжения питания усилителя 15 мощности управляемого инвертора 1 и содержит блок 24 управления, состоящий из формирователя 25 сигнала рассогласования и регулятора 26 тока, а также обратный мост 27.
Формирователь 25 предназначен для сравнения амплитуды сигнала обратной связи с заданным опорным значением и для выделения сигнала рассогласования.
Формирователь 10 импульсов состоит из резистивного делителя 28 напряжения, выход которого соединен с входом компаратора 29. Резистивный делитель 28 напряжения предназначен для снижения напряжения возбуждения до уровня, обеспечивающего надежную работу компаратора 29, который предназначен для формирования последовательности импульсов, несущих информацию о фазе сигнала возбуждения с выхода управляемого инвертора.
Устройство для обработки изделий в ультразвуковом поле, обеспечивающее реализацию способа, работает следующим образом.
Предварительно изделие оценивается с точки зрения распределения на его поверхности загрязнений, его конфигурации, размеров и пр. В зависимости от этого определяют количество и местоположение преобразователей, которые должны быть
приведены в соответствие с обрабатываемой зоной. До включения устанавливают в мультивибраторе 18 время обработки каждой зоны соответствующим преобразователем, общее время обработки. Включают устройство. После включения устройства путем изменения значения 11опорн. в формирователе 25 сигнала рассогласования (фиг. 7) задают значение амплитуды механических
0 колебаний в блоке 8 управляемого обратного моста, требуемое по технологии и обеспечивающее гарантированно качественную очистку (отмывку). Чем сильнее загрязнение, тем больше времени идет на обработку
5 изделия. С другой стороны, в зависимости от профиля изделия, глубины рельефа и пр. также требуется различная интенсивность обработки отдельных зон объекта.
При включении питания управляемый
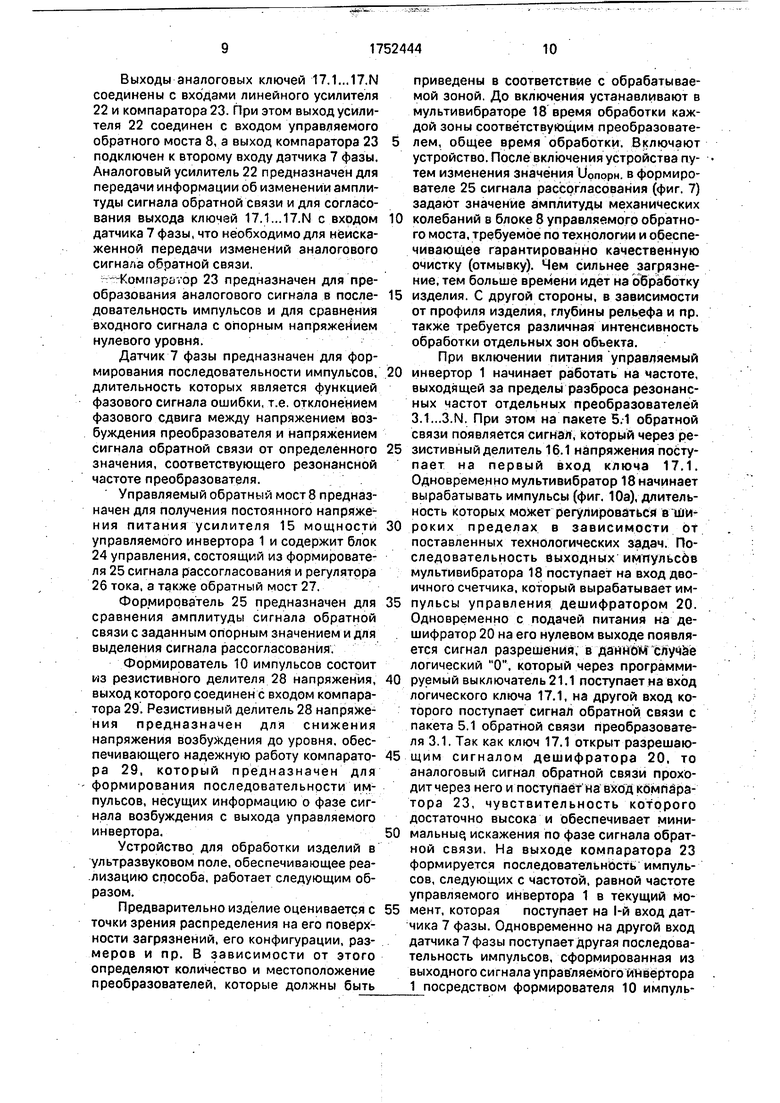
0 инвертор 1 начинает работать на частоте, выходящей за пределы разброса резонансных частот отдельных преобразователей 3.1...3.N. При этом на пакете 5.1 обратной связи появляется сигнал, который через ре5 зистивный делитель 16.1 напряжения поступает на первый вход ключа 17.1. Одновременно мультивибратор 18 начинает вырабатывать импульсы (фиг. 10а), длительность которых может регулироваться в ши0 роких пределах в зависимости от поставленных технологических задач. Последовательность выходных импульсов мультивибратора 18 поступает на вход двоичного счетчика, который вырабатывает им5 пульсы управления дешифратором 20. Одновременно с подачей питания на дешифратор 20 на его нулевом выходе появляется сигнал разрешения, в данном случае логический О, который через программи0 руемый выключатель 21.1 поступает на вход логического ключа 17.1, на другой вход которого поступает сигнал обратной связи с пакета 5.1 обратной связи преобразователя 3.1. Так как ключ 17.1 открыт разрешаю5 щим сигналом дешифратора 20, то аналоговый сигнал обратной связи проходит через него и поступает на вход компаратора 23, чувствительность которого достаточно высока и обеспечивает мини0 мальные, искажения по фазе сигнала обратной связи. На выходе компаратора 23 формируется последовательность импульсов, следующих с частотой, равной частоте управляемого инвертора 1 в текущий мо5 мент, которая поступает на 1-й вход датчика 7 фазы. Одновременно на другой вход датчика 7 фазы поступает другая последовательность импульсов, сформированная из выходного сигнала управляемого инвертора 1 посредством формирователя 10 импульсов с резистивным делителем на входе (фиг. 8). Сигналы на входе датчика 7 фазы отлича- кЗтся друг от друга по фазе (фиг, 10), причем фазовый сдвиг между ними может изменяться от 0 (фиг. 106) до лг(фиг. 10в) в зависимости от значения текущей частоты инвертора. Конструкция преобразователей 3.1...3.N такова, что при работе инвертора на резонансной частоте определенного преобразователя фазовый сдвиг между напряжением возбуждения с выхода инвертора и напряжением сигнала обратной связи составляет (Фиг- Юз, фиг. 11 fр) и не
зависит от выходной мощности инвертора. На выходе датчика 7 фазы формируется последовательность импульсов, длительность которых обратно пропорциональна абсолютной величине фазового сдвига входных
сигналов. Очевидно, что сдвигу фаз
будет соответствовать последовательность импульсов типа меандр со скважностью, равной 2.
Частотный модулятор 9, на вход которого поступают импульсы с датчика 7 фазы, вырабатывает сигнал рассогласования в зависимости от их скважности. Если текущая частота инвертора 1 меньше резонансной частоты преобразователя 3.1 (текущая частота инвертора меньше fp (фиг. 1 от О до fp), то скважность импульсов имеет значение меньше 2 (фиг, 106), и выходной сигнал частотного модулятора 9 возрастает. Это вызывает увеличение частоты задающего генератора 13 и, как следствие, изменение рабочей частоты инвертора 1 до тех пор, пока скважность импульсов на входе частотного модулятора 9 не станет более 2 (фиг. 10е). При этом выходной сигнал модулятора 9 начнет уменьшаться, тем самым стабилизируя рабочую частоту инвертора 1 (фиг. 11а) на резонансной частоте преобразователя 3.1. Точность автоматической подстройки частоты в данном случае довольно высока (погрешность поддержания частоты не превышает0,1 %). Время перестройки частоты инвертора 1 составляет несколько пе- риодов высокой частоты (единицы миллисекунд). По окончании процесса автоподстройки частоты амплитуда механических колебаний преобразователя 3.1 достигает максимального значения. При этом увеличивается амплитуда сигнала обратной связи на выходе линейного усилитз- ля 22, который поступает на вход блоки л управляемого обратного моста, где амплитуда сигнала обратной связи сравнивается с заданным опорным значением и формируется сигнал рассогласования.
Если амплитуда сигнала обратной связи, пропорциональна амплитуде механических колебаний преобразователя , превышает опорное значение, то сигнал на выходе блока
8 управления уменьшается и напряжение на выходе управляемого обратного моста 8 снижается, вызывая, в свою очередь, снижение выходной мощности инвертора 1 до тех пор, пока амплитуда колебаний не станет чуть
меньше опорного значения, после чего процесс повторяется, обеспечивая стабилизацию амплитуды на заданном значении. Таким образом, по истечении малого времени переходного процесса устанавливается режим,
при котором частота инвертора равна резонансной частоте преобразователя 3.1, а амплитуда колебаний данного преобразователя стабилизирована на заданном значении. При этом наиболее интенсивная обработка ведется на резонансной частоте первого преобразователя, а остальные преобразователи работают на этой же частоте.
С приходом следующего тактового импульса мультивибратора 18 (фиг. бж) сигнал
разрешения (0) смещается на следующий (f-й) выход дешифратора 20. Аналоговый ключ 17.1 закроется и откроется ключ 17.2, разрешая прохождения высокочастотного сигнала обратной связи от преобразователя
3.2. По истечении времени переходного процесса частота инвертора 1 устанавливается равной резонансной частоте преобразователя 3.2, а амплитуда его механических колебаний стабилизируется на том же заданном значении (и0порн. на формирователе 25 сигнала рассогласования - const), что и в случае преобразователя 3. С приходом каждого следующего тактового импульса разрешающий сигнал (фиг. Юз, и) будет
перемещаться с одного выхода дешифратора 20 на другой, а частота инвертора 1 будет последовательно изменяться в соответствии с резонансными частотами остальных преобразователей 3.1...3.N. По окончании
всего цикла происходит сброс дешифратора 20 в исходное положение и цикл в случае необходимости может повториться.
При необходимости увеличения интен- сивности обработки определенной зоны объекта, расположенной в зоне действия I- го преобразователя, время работы инвертора 1 на его резонансной частоте может быть увеличено на время, равное целому числу периодов тэктоэых импульсов мульп амбра- гора 18. Для этого переключатели 21.1...21.N устанавливают в такое положение, что разрешающий сигнал поступает на определенный аналоговый ключ 17.1...17.N с. нескольких соседних выходов дешмфратоpa 20, увеличивая время откры г о го состояния данного ключа.
Таким образом, устройство позволяет изменять время и интенсивность обработки отдельных частей объекта в зависимости от степени загрязнения и сложности конфигурации, а также изменять интенсивность ул - тразвукового поля в различных точках обрабатываемого изделия, что обеспечивает повышение качества и сокращение вре- мени ультразвуковой обработки.
Формула изобретения 1. Способ обработки изделий в ультразвуковом поле, возбуждаемом ультразвуке- выми преобразователями, питаемыми от одного источника, включающий предварительное определение для каждого преобразователя зоны обработки, отличающий- с я тем, что, с целью повышения качества и сокращения времени обработки, осуществляют дискретную девиацию частоты ультра- звуковых колебаний в пределах резонансных частот последовательно от одного преобразователя к другому, предвари- тельно определив для каждого из них интервал времени интенсивной его работы, при этом последовательно в течение каждого заданного интервала времени осуществляют подстройку частоты на резонансную частоту каждого преобразователя, а амплитуду механических колебаний каждого из них поддерживают на заданном уровне.
2. Устройство для обработки изделий в ультразвуковом поле, содержащее управляемый инвертор, нагруженный на N ультразвуковых преобразователей, каждый из которых включает силовой пакет, частотный модулятор, управляемый обратный мост и датчик фазы, отличающееся тем, что, с целью повышения качества и сокращения времени обработки, в него введены N рези- стивных делителей напряжения, N аналоговых ключей, N переключателей, последовательно соединенные мультивибратор, двоичный счетчик и дешифратор, а также формирователь импульсов, линейный усилитель и компаратор, причем каждый из преобразователей снабжен пакетом обратной связи, а их выходы соединены через резистивные делители с первыми входами аналоговых ключей, выходы дешифратора соединены через переключатели с вторыми входами аналоговых ключей, выходы которых соединены между собой и со входами компаратора и линейного усилителя, Первый вход датчика фазы соединен с выходом компаратора, второй вход соединен через формирователь импульсов с выходом управляемого инвертора, а выход соединен через частотный модулятор с первым входом управляемого инвертора, второй вход которого соединен через управляемый обратный мост с выходом линейного усилителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство обработки сигналов электромузыкальных инструментов | 1990 |
|
SU1746400A1 |
| Автоматическая поточная линия ультразвуковой прошивки печатных плат | 1987 |
|
SU1488069A1 |
| РАДИОЛИНИЯ С АМПЛИТУДНО-ФАЗОМАНИПУЛИРОВАННЫМИ ШУМОПОДОБНЫМИ СИГНАЛАМИ | 1996 |
|
RU2101871C1 |
| Устройство для измерения параметров вибрации | 1990 |
|
SU1805296A1 |
| Способ регулирования частоты резонансного инвертора | 1988 |
|
SU1690133A1 |
| Устройство для контроля качества изделий | 1991 |
|
SU1772728A1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В НАПРЯЖЕНИЕ | 1987 |
|
RU2056700C1 |
| Преобразователь угла поворота вала в код | 1982 |
|
SU1125643A1 |
| Способ дистанционного контроля лифтов и устройство для его осуществления | 2016 |
|
RU2661256C2 |
| СИСТЕМА ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВУХФАЗНЫХ ПОТОКОВ | 1995 |
|
RU2097750C1 |
Изобретение позволяет повысить качество и сократить время ультразвуковой обработки за счет повышения эффективности и равномерности излучения каждым пье- зопреобразователем путем обеспечения их работы на резонансной частоте и максимальной амплитуде колебаний Новым в способе является то, что девиацию частоты ультразвуковых колебаний осуществляют дискретно от одного пьезопреобразователя к другому предварительно определив для каждого из них зону обработки и интервал времени интенсивной его работы, при этом последовательно в течение каждого заданного интервала времени осуществляют подстройку частоты источника ультразвукового излучения на резонансную частоту каждого преобразователя. Для реализации способа в устройство введены пакеты 5.1...5.N обратной связи, коммутирующий преобразователь 6 и формирователь 10 импульсов Выход управляемого инвертора 1 дополнительно соединен с входом формирователя 10 импульсов, выход которого соединен с первым входом датчика 7 фазы, выходы каждого пьезопреобразователя 3 1. 3.N соединены с группой входов коммутирующего преобразователя 6, аналоговый выход которого соединен с вторым входом датчика 7 фазы, а цифровой выход - с входом управ- ляемого обратного моста 8, выход датчика 7 фазы соединен с входом частотного модулятора 9 2 с п ф-лы, 11 ил. VJ СП ю 4 N
I
Per I
Фиг 4
i/
ki
Wwff
i// 5
1
УАГ
Фа Ю
О
О.Хрипта
Ь
Фиг. //
Составитель С Юдин Техред М.Моргентал
/
Корректор М.Шэроши
| СПОСОБ РАЗРАБОТКИ НЕФТЯНОЙ ЗАЛЕЖИ | 2001 |
|
RU2182653C1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
