Изобретение относится к электротехнике и может быть использовано в асинхронных электроприводах с непосредственным преобразователем частоты общепромышленных механизмов.
Известен способ динамического торможения асинхронного электропривода, заключающийся в том, что обмотки статора электродвигателя отключают от сети переменного тока и подключают к сети постоянного тока.
Недостатками указанного способа является невысокое быстродействие и сложность реализации из-за необходимости включения в состав электропривода источника постоянного тока.
Наиболее близким изобретению является способ динамического торможения асинхронного электродвигателя с тиристор- ным преобразователем в цепи статора, при
котором на время торможения формируют сигналы управления тиристорами с фазой, обеспечивающей ограничение тока торможения на заданном уровне, и подают сформированные сигналы на определенные тиристоры.
Недостатком способа является низкое быстродействие, определяемое необходимостью в выдержке времени между моментом поступления команды на торможение и моментом включения определенных тиристоров для исключения короткого замыкания сети и синхронизации тиристоров с напряжением сети.
Целью изобретения является повышение быстродействия.
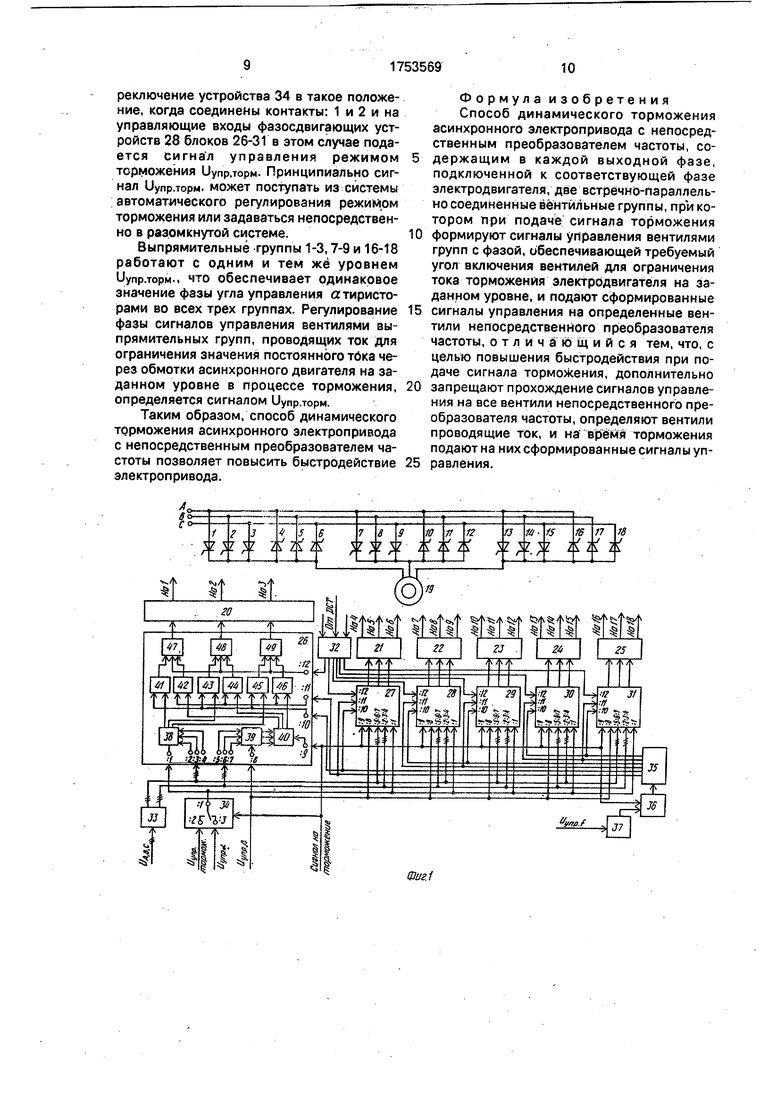
На фиг.1 показаны функциональные схемы асинхронного электропривода с непосредственным преобразователем частоты и устройства для реализации
VJ
сл
ы сл
опредлагаемого способа динамического торможения указанного асинхронного электродвигателя; на фиг.2 и 3 - диаграммы, поясняющие его работу.
Электропривод (фиг.1) содержит непосредственный преобразователь частоты, состоящий из шести вентильных выпрямительных групп на тиристорах 1-18, причем катодные вентильные группы на тиристорах 1-3, 7-9, 13-15 и анодные на тиристорах 4-6, 10-12 и 15-18 в каждой выходной фазе преобразователя соединены между собой встречно-параллельно, асинхронный двигатель 19, блоки 20-25 выходных каскадов системы управления для каждой вентильной выпрямительной группы, блоки 26-31 фазового управления для каждой выпрямительной группы, выполненные с двенадцатью входами и тремя выходами, блок 32 раздельного управления, блок 33 синхронизации, переключающий элемент 34, пересчетное устройство 35, элемент 36 запрета, задающий генератор 37. Каждый блок 26-31 фазового управления содержит первое 38 и вто рое 39 фазосдвигающие устройства, устройство 40 запрета, двухвходвые элементы И-НЕ 41-46 и трехвходовые элементы И-НЕ 47-49.
Катоды тиристоров 1-3 и аноды тиристоров 4-6 подключены к первой фазе двигателя 19, катоды тиристоров 7-9 и аноды тиристоров 10-12 - к второй фазе двигателя 19, а катоды тиристоров 13-15 и аноды тиристоров 16-18 - к третьей фазе двигателя 19. Аноды тиристоров 1, 7 и 13 и катоды тиристоров 4, 10 и 16 подключены к фазе А питающей сети, аноды тиристоров 2, 8 и 14 и катоды тиристоров 5, 11 и 17 - к фазе В питающей сети, а аноды тиристоров 3, 9 и 15 и катоды тиристоров 6,12 и 18 - к фазе С питающей сети.
Первый, второй и третий выходы блока 20 подключены соответственно к управляющим электродам тиристоров 1-3, первый, второй и третий выходы блока 21 подключены соответственно куправляющим электродам тиристоров 4-6, первый, второй и третий выходы блока 22 подключены соответственно к управляющим электродам тиристоров 7-9, первый, второй и третий выходы блока 23 подключены соответственно к управляющим электродам тиристоров 10-12, первый, второй и третий выходы блока 24 подключены соответственно к управляющим электродам тиристоров 13-15, а первый, второй PI третий выходы блока 25 подключены соответственно к управляющим электродам тиристоров 16-18.
Первые, вторые и третьи входы блоков 20-25 подключены соответственно к первым, вторым и третьим выходам блоков 26- 31, Входы блока 32 раздельного управления подключены к соответствующим датчикам состояния вентилей непосредственного
преобразователя частоты. Соответствующие выходы блока 32 подключены к двенадцатым входам блоков 26-31. Первый выход пересчетного устройства 35 подключен к одиннадцатым входам, а второй выход к де0 сятым входам блоков 26 и 27. Третий выход устройства 35 подключен к одиннадцатым входам, а четвертый выход к десятым входам блоков 28 и 29. Пятый выход устройства 35 подключен к одиннадцатым входам, а
5 шестой выход к десятым входам блоков 30 и31.
Входы блока 33 синхронизации подключены к соответствующим фазам питающей сети. Первый, второй и третий выходы блока
0 33 подключены соответственно к второму, третьему и четвертому входам блоков 26, 28 и 30 и пятым, шестым, седьмым входам блоков 27, 29 и 31, а четвертый, пятый и шестой выходы блока 33 - к пятому, шестому, седь5 мому входам блоков 26, 28 и 30 и второму, третьему, четвертому входам блоков 27, 29 и31.
Выход элемента 34 подключен соответственно к первым входам блоков 26-31. Пер0 вый вход элемента 34 подключен к источнику управляющего сигнала выпрямительным режимом работы преобразователя (Uynp a), a второй входы элемента 34 подключен к источнику управляющего сигнала ре5 жимом торможения (иуПр.торм.). Восьмые входы блоков 26-31 подключены к источнику управляющего сигнала инверторным режимом работы преобразователя (Uynp/), вход устройства 35 подключен к выходу элемента
0 36. Первый вход устройства 36 и девятые входы блоков 26-31, а также третий вход элемента 34 подключены к выходу источника сигнала на торможение. Второй вход устройства 36 подключен к выходу задающего
5 генератора 37. Вход генератора 37 подключен к источнику управляющего сигнала частотой выходного напряжения преобразователя (Uynp).
Блоки 26-31 фазового управления имеют идентичное построение и сострят из первого фазосдвитающего элемента 38, первый вход которого подключен к первому входу блока 26, а второй , третий и четвертый входы элемента 38 подключены соответственно
5 к второму, третьему и четвертому входам блока 26.
Первый выход устройства 38 подключен к второму входу элемента 41, второй выход подключен к второму входу элемента 43, а
0
третий выход подключен к второму входу элемента 45. Первый вход второго фазосд- витающего элемента 39 подключен к восьмому входу блока 26 а второй, третий и четвертый входы элемента 39 подключены соответственно к пятому, шестому и седьмому входам блоков 26. Первый, второй и третий выходы устройства 39 подключены соответственно к первому, второму и третьему входам элемента 40. Четвертый вход элемента 40 подключен к девятому входу блока 26, Одиннадцатый вход блока 26 подключен к девя- ому входу блока 26. Одиннадцатый вход блока 26 подключен к первым входам элементов 42, 44 и 46, а десятый вход блока 26 подключен к первым входам элементов 41, 43 и 45 Первый и третий входы элемента 47 подключены соответственно к выходам элементов 41 и 42, первый и третий входы элемента 47 подключены соответственно к выходам элементов 43 и 4, а первый и третий входы элемента 49 подключены соответственно к выходам элементов 45 и 46. Вторые входы элементов 47-49 подключены к двенадцатому входу блока 26. Устройство, реализующее способ динамического торможения асинхронного электропривода с непосредственным преобразователем частоты, работает следующим образом.
Формирование кривой выходного напряжения непосредственного преобразователя частоты осуществляется посредством циклического переключения вентильных выпрямительных групп согласно выбранному алгоритму управления, а ди- апазон регулирования частоты и напряжения определяется управляющими сигналами по частоте Uynp.t и напряжения Uynp.o. (управление выпрямительным режимом), Uynp/J (управление инверторным режимом). При активно-индуктивной нагрузке
с фазой 0й arctg -5-, например, равной
Кн
60 эл.град., в каждом полупериоде протекания тока в одном направлении, соответствующая вентильная выпрямительная группа 120 эл.град работает в выпрямительном режиме, доставляя энергию в цепь нагрузки, а в оставшиеся 60 эл.град этого полупериода - в инверторном режиме, возвращая энергию в сеть. В результате кривая выходного напряжения на выходе преобразователя опережает ток на 60 эл.град. На фиг.1 представлен вариант непосредственного преобразователя частоты, выводы постоянного тока в каждой трехфазной схеме замкнуты накоротко, поэтому катодные и
анодные группы в такой схеме могут работать только раздельно.
В момент времени ц (фиг.2) включается только катодная группа тиристоров 1-3
(фиг.1) и работает в выпрямительном режиме в течение 120 эл.град. по отношению к периоду выходной частоты. При этом формируется положительная полуволна выходного напряжения и ток в нагрузке J3fl
0 увеличивается (фиг.2). Затем, начиная с момента времени т.2 в течение 60 эл.град,, подается команда на работу катодной группы тиристоров 1-3 в инверторном режиме, в результате чего ток в нагрузке снижается до
5 нуля (в момент времени ta). После спада до нуля тока в тиристорах катодной группы требуется определенное время для восстановления их запорных свойств, а затем в момент времени м подается команда на ра0 боту в выпрямительном режиме анодной группы тиристоров 4-6 (для формирования отрицательной полуволны выходного напряжения).
Изменение частоты выходного напря5 жения непосредственно преобразователя частоты осуществляется регулируемым задающим генератором 37 в функции управляющего сигнала Uynp.t, поступающего на его вход. Сигналы с выхода задающего генера0 тора 37 подаются через элемент 36 на вход пересчетного устройства 35, на выходе которого формируется шестипроводная система тактовых импульсов для выпрямительного и инверторного режимов
5 трех выходных фаз преобразователя. На десятые входы блоков 26-31 фазового управления подаются тактовые сигналы для выпрямительного, а на одиннадцатые входы для инверторного режимов.
0 Блок 32 раздельно го управления на основании сигналов о состоянии вентилей формирует шестипроводную систему сигналов соответствующих проводящему состоянию данной вентильной группы, а также
5 паузу на переключение вентильных выпрямительных групп длительностью порядка 100-250 мкс (которая выбирается исходя из реального времени выключения применяемых тиристоров).
0 Синхронизация сигналов управления вентиляции относительно фаз питающей сети осуществляется сигналами с выхода блока 23 синхронизации (например, выполненного по классической схеме транс5 форматор синхронизации-нуль-органы). Сигналы для синхронизации в выпрямительном режиме поступают на второй, третий, четвертый входы блоков 26-31, а в инверторном режиме на пятый, шестой и седьмой входы указанных блоков.
Управляющие сигналы для выпрямительного режима Uynp.a поступают на первые входы, а для инверторного иупр/3 на восьмые входы блоков 26-31 фазового управления,
Так как блоки 26-31 фазового управления имеют идентичное построение, то рассмотрим работу одного из них, например, блока 26, управляющего тиристорами 1-3, формирующими положительную полуволну выходного напряжения. На вторые входы элементы И-НЕ 41, 43 и 45 с соответствующих выходов устройства 38 подаются сигна- лы управления тиристорами для выпрямительного режима (т.е. синхронизированные с положительной полуволной напряжения питающей сети А, Б, С). Для управления тиристором 1, подключенным к фазе А, сигнал подается на элемент 41, для тиристора 2 на элемент 43, а для тиристора 3 на элемент 45. На первые входы указанных элементов И-НЕ 41, 43 и 45 подается тактовый сигнал, длительностью 180 эл.град. периода выходного напряжения преобразователя, разрешающий прохождение сигналов управления в выпрямительном режиме на данную вентильную группу (тиристоры 1-3).
На вторые входы элементов И-НЕ 42, 44 и 46 с соответствующих выходов устройства 39, через запрещающий элемент 40, подаются сигналы управления тиристорами для инверторного режима (т.е. синхронизированные с отрицательной полуволной напря- жения питающей сети А,В,С). Для управления тиристором 1, подключенным к фазе А, сигнал поступает на элемент 42, для тиристора 2 на элемент 44, а для тиристора 3 на элемент 46. На первые входы указанных элементов И-НЕ подается сигнал разрешающий формирование инверторного режима в данной вентильной выпрямительного группе.
На первые входы элементов И-НЕ 47-49 подаются сигналы управления тиристорами в выпрямительном режиме, а на третьи входы указанных элементов И-НЕ 47-49 управления тиристорами в инверторном режиме. Продолжительность работы вентильной выпрямительной группы (тиристоров 1,2 и 3) в выпрямительном и инверторном режимах зависит от Cos (p и определяется сигналом с блока 32 раздельного управления, поступающим на вторые входы элементов И-НЕ 47-49. Управляющие сигналы для тиристора 1 с выхода элемента 47 для тиристора 2 с выхода элемента 48 и для тиристора 3 с выхода элемента 49 поступают в блок выходных каскадов (где осуществляется усиление мощности и их гальваническая развязка от силовой цепи).
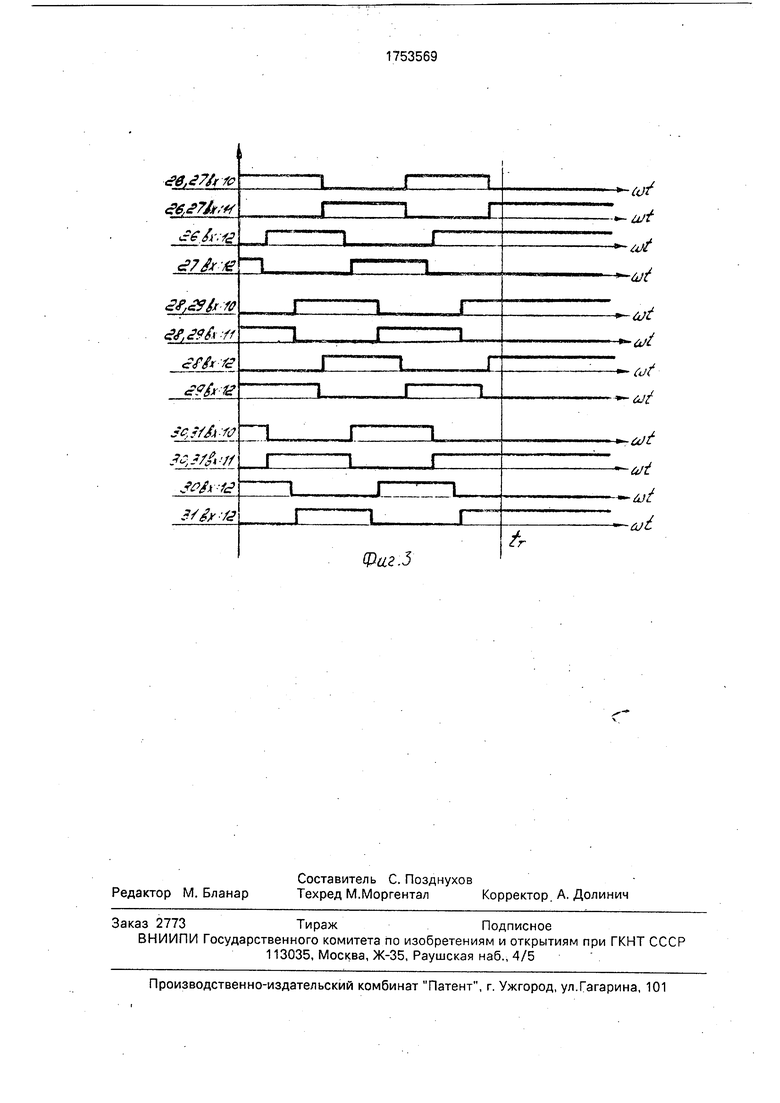
При подаче сигнала на торможение электропривода, например, в момент времени ц(фиг.З), осуществляется запрет циклического переключения вентильных выпрямительных групп блокировкой сигналов с задающего генератора 37 с помощью элемента 36 (где, например, в качестве его
0 используется двухвходовой элемент И-НЕ). При этом с соответствующих выходов устройства 35 на десятые и одиннадцатые входы блоков 26-31 подаются сигналы (с триггеров кольцевой пересчетной схемы),
5 находящиеся в состоянии предшествующему моменту времени (фиг.З).
Так как в режиме динамического торможения необходимо обеспечивать не только протекание постоянного тока, но и регули0 рование его значения через статорные обмотки асинхронного двигателя 19, то необходимо, чтобы тиристоры выпрямительных групп были синхронизированы с фазами питающей сети соответствующими
5 выпрямительному режиму работы для каждой вентильной группы, проводящей ток. Поэтому в каждом блоке 26-31 сигналом на торможение, поступающим на их девятые входы, блокируются сигналы инверторного
0 режима с помощью элемента 40, присутствует сигнал логического нуля, блокирующий по входам элементы И-Н Е 42,44 и 46. Таким образом, на тиристоры проходят лишь сигналы управления выпрямительным режи5 мом через элементы 41, 43 и 45 на входы элементов 47-49.
Определение выпрямительных групп, проводящих и не проводящих ток в момент торможения t1, осуществляется с помощью
0 блока 32, сигналы с выхода которого подаются на двенадцатые входы блоков 26-31. Например, для данного случая (сигнала логической единицы соответствует проводящему состоянию данной вентильной
5 группы) согласно фиг.З в проводящем состоянии находятся тиристоры 1-3 управляемые блоком 26, тиристоры 7-9, управляемые блоком 28 и тиристоры 16-18, управляемые блоком 31, тиристоры 4,5,610-15 в этот момент
0 времени ток не проводят. И в дальнейшем сигналами логического нуля с выходов блока 32 блокируются выходные элементы 47- 49 в блоках 27,29 и 30 вентильных групп, не проводящих ток, а в блоках 26, 28 и 31 сиг5 налами логической единицы разрешают прохождение сигналов управления на соответствующие тиристоры выпрямительных групп.
В момент ti подачи сигнала на торможение электропривода происходит также переключение устройства 34 в такое положение, когда соединены контакты: 1 и 2 и на управляющие входы фазосдвигающих устройств 28 блоков 26-31 в этом случае подается сигнал управления режимом торможения UynpjopM. Принципиально сигнал Uynp.-горм. может поступать из системы автоматического регулирования режимом торможения или задаваться непосредственно в разомкнутой системе.
Выпрямительные группы 1-3,7-9 и 16-18 работают с одним и тем же уровнем иупр.торм., что обеспечивает одинаковое значение фазы угла управления «тиристорами во всех трех группах. Регулирование фазы сигналов управления вентилями выпрямительных групп, проводящих ток для ограничения значения постоянного тбка через обмотки асинхронного двигателя на заданном уровне в процессе торможения, определяется сигналом иупр.торм.
Таким образом, способ динамического торможения асинхронного электропривода с непосредственным преобразователем частоты позволяет повысить быстродействие электропривода.
Формула изобретения Способ динамического торможения асинхронного электропривода с непосредственным преобразователем частоты, содержащим в каждой выходной фазе, подключенной к соответствующей фазе электродвигателя, две встречно-параллельно соединенные вентильные группы, при котором при подаче сигнала торможения формируют сигналы управления вентилями групп с фазой, обеспечивающей требуемый угол включения вентилей для ограничения тока торможения электродвигателя на заданном уровне, и подают сформированные сигналы управления на определенные вентили непосредственного преобразователя частоты, отличающийся тем, что, с целью повышения быстродействия при подаче сигнала торможения, дополнительно запрещают прохождение сигналов управления на все вентили непосредственного преобразователя частоты, определяют вентили проводящие ток, и на время торможения подают на них сформированные сигналы управления.



| название | год | авторы | номер документа |
|---|---|---|---|
| Реверсивный вентильный электродви-гАТЕль | 1979 |
|
SU813608A1 |
| Вентильный электропривод | 1984 |
|
SU1262679A2 |
| Устройство для управления реверсивным вентильным электродвигателем | 1982 |
|
SU1064412A2 |
| Электропривод переменного тока | 1986 |
|
SU1517105A1 |
| Способ управления циклоконвертором и устройство для его осуществления | 1981 |
|
SU1007177A1 |
| Электропривод переменного тока | 1989 |
|
SU1781807A1 |
| Устройство для управления м-фазным вентильным преобразователем | 1989 |
|
SU1647809A1 |
| Асинхронный электропривод для грузоподъемного механизма | 1986 |
|
SU1451829A1 |
| Устройство для управления реверсивным вентильным электродвигателем | 1981 |
|
SU1001415A1 |
| Вентильный электропривод | 1981 |
|
SU987770A1 |

Использование: асинхронные электроприводы с непосредственными преобразователями частоты общепромышленных механизмов. Сущность: при подаче сигнала торможения формируют сигналы управления вентилями непосредственного преобразователя частоты с фазой, обеспечивающей требуемый угол включе: ния вентилей для ограничения тока торможения электродвигателя на заданном уровне, запрещают прохождение сигналов управления на все вентили преобразователя, определяют вентили, проводящие ток, и на время торможения подают на них сформированные сигналы управления, за счет чего обеспечивают повышение быстродействия. 3 ил. (Л
Фиг1
L/еегц
С A J
| Москаленко В.В., Автоматизированный электропривод.-М.: Энергоатомиздат, 1986, с.263-264 | |||
| Шубенко В.А., Браславский И.Я | |||
| Тири- сторный асинхронный электропривод с фазовым управлением - М.: Энергия, 1972, с.106-109. |
