Изобретение относится к машиностроению, а именно к э лектрогидравлическим следящим приводам, применяемым в различных агрегатах, например, для управления валом гидрораспределителя гидравлического пресса.
Известен электрогидравлический двух- каскадный усилитель, содержащий узел два сопла - заслонка, подпружиненный золотник (и электромеханический преобразователь, связанный с заслонкой.
Данное устройство требует применения Дополни ёльШх узлов для построения следящего привода с обратной связью.
Наиболее близким по технической сущности к предлагаемому является следящий привод, содержащий последовательно соединенные электронный усилитель, электромеханический преобразователь, гидроусилитель и силовой гидропривод, связанный через датчик положения штока с усилителем. При соединении выходного штока силового гидроцилиндра с нагрузкой такой привод частот на практике не обеспечивает высокой надежности, ч|о связано с наличием динамических ударов при выборе зазоров. Так, например, в передаче рейка - шестерня между штоком силового гидроцилиндра и валом гидрораспределителя, которая часто применяется в сервоприводах, динамические удары при выборе зазоров приводят к выкрашиванию зубьев передачи, прогрессированию люфта и, как следствие, к снижению точности позициониропания, надежности и долговечности работы следящей системы.
вааве а
|
сл
Цель изобретения - повышение надежности за счет устранения ударов при выборе зазоров.
Указанная цель достигается тем, что электрогидравлический следящий привод, содержащий электронный усилитель, первый вход которого соединен с каналом задания, а выход через электромеханический преобразователь связан с гидравлическим усилителем, выполненным с двумя взаимоинверсными выходами, один из которых Подключен к первой полости силового гидроцилиндра, и датчик положения штока гидроцилиндра, соединенный своим выходом с вторым входом электронного усилителя, снабжен трехлинейным распределителем с пружинным возвратом и с односторонним электрическим управлением, дросселем, компаратором и датчиком перепада давления, входы которого сообщены с полостями силового гидропривода, а вЫход св язан с компаратором, соединенным своим выходом с каналом управления трехлинейным распределителем, при этом второй быход гидравлического усилителя подключен ко входу трехлинейного распределителя, первый выход которого через дроссе ль, а второй выход непосредственно сообщены со второй полостью силового гидроцилиндра.
Схема следящего привода приведена на чертеже.
Он содержит электронный усилитель 1, первый вход которого соединен с каналом задания 2, а выход через электромеханический преобразователь 3 связан с гидравлическим усилителем 4, выполненным с двумя взаимоинверсными выходами 5, 6, 5 подключен к первой полости 7 силового гидроцилиндра 8. Выход б усилителя 4 сообщен со входом 9 трехлинейного распределителя 10, выполненного с пружинным возвратом и с электрическим односторонним управлением.
Первый выход 11 распределителя 10 соединен через дроссель 12 с второй полостью 13 гидроцилиндра 8,а второй выход 14 связан с полостью 13 непосредственно. Силовой гидроцилиндр снабжен датчиком 15 положения штока 16, сообщенным своим выходом с вторым входом усилителя 1. Полости 7 и 13 подключены к датчику 17 перепада давления, связанному своим выходом с компаратором 18. Выход компаратора 18 соединен с электрическим управляющим входом распределителя 10. В качестве примера на чертеже показано выполнение электромеханического преобразователя с заслонкой 19, расположенной между двумя соплами 20, 21, образующими первый каскад усиления. Второй каскад выполнен в
виде золотникового усилителя 4 с подпружиненным золотником 22.
Возможно применение другого типа электромеханического преобразователя и
гидроусилителя, выполняющих аналогичные функции.
Электрогидравлический следящий привод работает следующим образом,
Управляющий сигнал задания поступа0 ет на первый вход усилителя 1, где суммируется с сигналом, пришедшим на его второй вход с выхода датчика 15, усиливается и поступает на вход электромеханического преобразователя 3, который, воздействуя
5 на золотник 22 гидравлического усилителя 4, подает рабочую жидкость в силовой гидроцилиндр 4 через трехлинейный распределитель 10. На этапе выбора зазоров перепад давления на поршне силового гидроцилин0 дра 8 мал и сигнал на выходе датчика 17 перепада давления недостаточен для переключения компаратора 18 в положение, обеспечивающее переключение трехлинейного распределителя 10. Последний соеди5 няет полость 13 силового гидроцилиндра 8 с выходом 11 гидравлического усилителя 10 через дроссель 12. Это обеспечивает движение штока 16 силового гидроцилиндра 8 на этапе выбора зазоров с малой скоростью,
0 что устраняет динамический удар в момент окончания выбора зазоров. После выбора зазоров перепад давления на поршне силового гидроцилиндра 8 повышается, увеличивается и сигнал на выходе датчика 17
5 перепада давления, который приводит к переключению компаратора 18. Сигнал с выхода последнего приводит к срабатыванию трехлинейного распределителя 10. При этом последний соединяет полость 13 сило0 вого гидроцилиндра 8 непосредственно с выходом 14 гидравлического усилителя 10, что определяет максимальную скорость движения штока 16 силового гидроцилиндра 8. При подходе штока 16 к заданному
5 положению сигнал на выходе усилителя 1 будет уменьшаться и станет равным нулю при достижении штоком 16 силового гидроцилиндра 8 заданного положения позиционирования, гидроусилитель 4, прекратит
0 подачу рабочей жидкости в силовой гидроцилиндр 8, шток которого остается в заданном положении позиционирования.
При обратном движении штока 16 через дроссель 12 осуществляется сброс рабочей
5 среды, что также определяет минимальную скорость перемещения штока при выборе зазоров
Формула изобретения Электрогидравлический следящий привод, содержащий электронный усилитель,
первый вход которого соединен с каналом задания, а выход через электромеханический преобразователь связан с гидравлическим усилителем, выполненным с двумя взаимно инверсными выходами, один из которых подключен к первой полости силового гидроци- линдра, и датчик положения штока гидроцилиндра, соединенный своим выходом с вторым входом электронного усилителя, отличающийся тем, что, с целью повышения надежности за счет устранения ударов при выборе зазоров, привод снабжен трехлинейным распределителем с пружин0
ным возвратом и с односторонним электрическим управлением, дросселем, компаратором и датчиком перепада давления, входы которого сообщены с полостями силового гидроцилиндра, а выход связан с компаратором, соединенным своим выходом с каналом управления трехлинейным распределителем, при этом второй выход гидравлического усилителя подключен к входу трехлинейного распределителя, первый выход которого через дроссель, а второй выход непосредственно сообщены с второй полостью силового гидроцилиндра.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД ДРОССЕЛЬНОГО РЕГУЛИРОВАНИЯ | 2007 |
|
RU2347949C1 |
| ЦИФРОВАЯ ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ОБЪЕКТА | 2008 |
|
RU2374671C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2006 |
|
RU2311567C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ АГРЕГАТ, СЛЕДЯЩИЙ ДВУХКАСКАДНЫЙ ГИДРОУСИЛИТЕЛЬ И РЕГУЛИРУЕМЫЙ СИЛОВОЙ ДРОССЕЛЬ | 2002 |
|
RU2242641C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД ОБЪЕМНОГО РЕГУЛИРОВАНИЯ | 2007 |
|
RU2347952C1 |
| Устройство управления гидроприводом затвора шлюза | 1988 |
|
SU1647074A1 |
| Электрогидравлическая система привода двухстворчатых ворот шлюза | 1986 |
|
SU1472565A1 |
| АВТОНОМНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РУЛЕВОЙ ПРИВОД С ДОПОЛНИТЕЛЬНОЙ ОБРАТНОЙ СВЯЗЬЮ ПО ДИНАМИЧЕСКОМУ ДАВЛЕНИЮ | 2024 |
|
RU2826237C1 |
| Электрогидравлическое устройство рулевого управления транспортного средства | 1985 |
|
SU1337306A1 |
| Объемный гидропривод рулевого управления транспортного средства | 1984 |
|
SU1180291A1 |
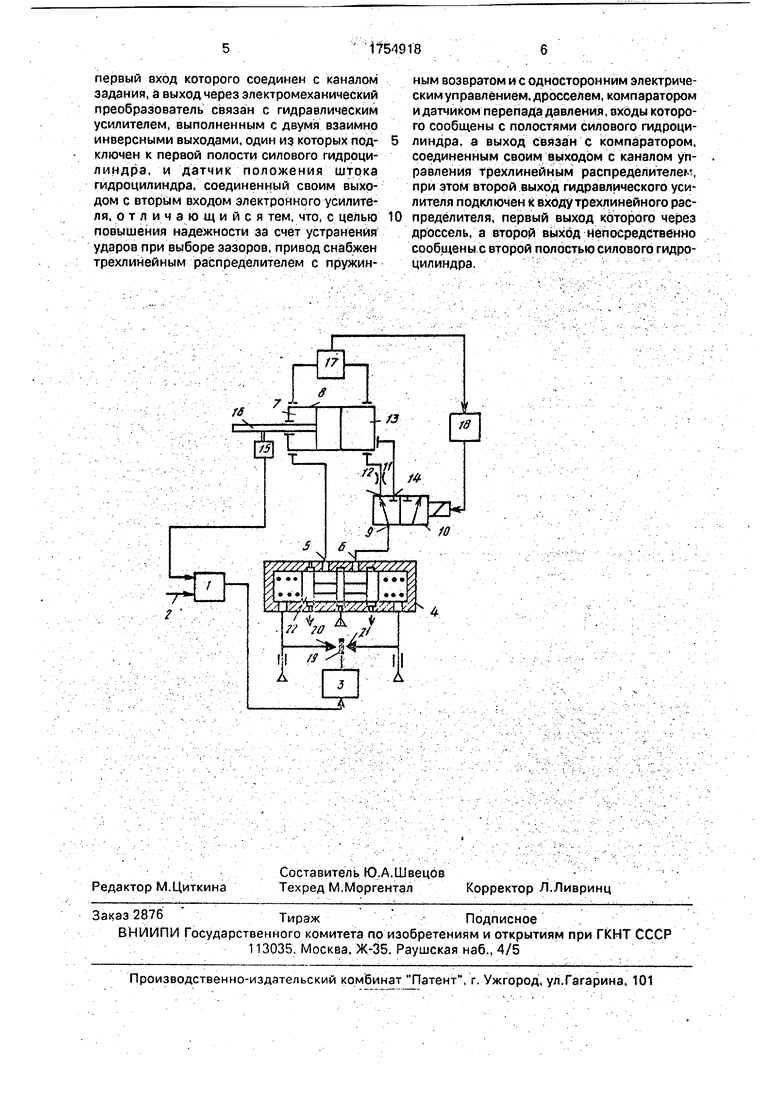
Изобретение относится к машиностроению. Цель изобретения - повышение надежности электрогидравлического следящего привода. Электрогидравлический следящий привод содержит усилитель /I, первый вход которого соединен с каналом задания 2, а выход через электромеханический преобразователь 3 связан с гидравлическим усилителем 4, один из выходов 5 которого подключён к первой полости 7 силового гидроцилиндра 8, датчик положения 15 штока 16 гидроцилиндра 8, соединенный с вторым входом усилителя 1, трехлинейный распределитель 10, дроссель 12, компаратор 18 и датчик перепада давлений 17, свл- занный с полостями 7, 13 силового гидроцилиндра 8 и с компаратором 18, соединенным с каналом управления трехлинейным распр еде л и те л е м ТО, вход 9 которого подключен которому выходу 6 гидравлического усилителя 4, первый выход 11 .через дроссель 12, а второй 14непосредственно сообщены с второй полостью 13 силового гидроцилиндра 8, 1 ил. СП с
17
в
С Л XY Sfy/M- /y PT y
| Башта Т | |||
| М | |||
| Гидропривод и гидропневмоавтоматика | |||
| М.: Машиностроение, 1972, с | |||
| Переносная мусоросжигательная печь-снеготаялка | 1920 |
|
SU183A1 |
| Халат для профессиональных целей | 1918 |
|
SU134A1 |
| Попов Д | |||
| Н; Динамика и регулирование гидро- и пневмосистем, М.: Машиностроение, 1977, с | |||
| Клапан | 1919 |
|
SU357A1 |
| Топливник с глухим подом | 1918 |
|
SU141A1 |
