1
Изобретение относится к системам гидроавтоматики поршневого привода и может быть использовано в механическом оборудовании гидросооружений.
Цель изобретения - повышение надежности работы привода.
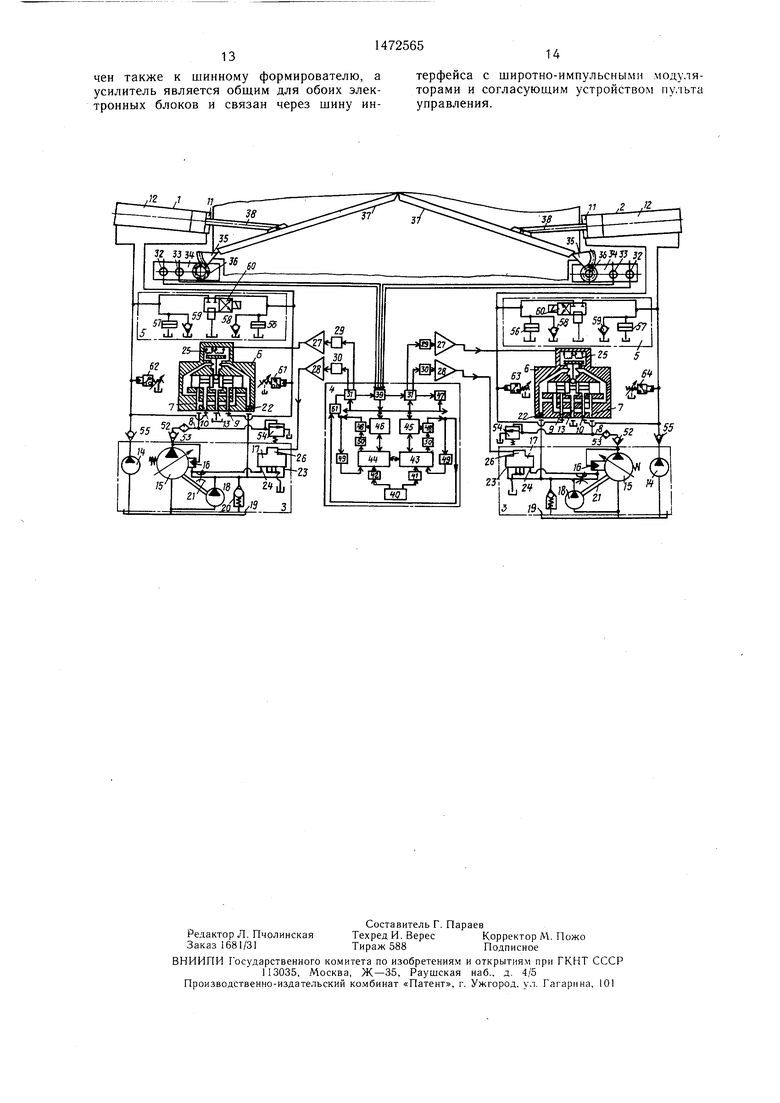
На чертеже изображена схема электро гидравлической системы привода двустворчатых ворот шлюза.
Гидропривод двустворчатых ворот шлюза включает два силовых гидроцилиндра 1 и 2 двустороннего действия, система управления каждого из которых содержит насосную станцию (НС) 3, управляемую с пункта 4 управления, а также предохранительный блок 5, электрогидравлический усилитель (ЭГУ) 6, включенный последовательно в напорную магистраль 8 насосной станции 3. Полость питания 7 ЭГУ соединена с напорной магистралью 8, исполнительные полости 9 и 10 ЭГУ соединены соответственно со штоко- вой 11 и поршневой 12 полостями гидроцилиндра, а средняя полость 13 соединена со сливом.
Насосная станция 3 включает насос 14 дожима, основной насос 15 с регулятором 16
го
Сд
о
СД
мощности и ЭГУ 17, идентичный ЭГУ 6. На одном валу с основным насосом 15 установлен насос 18 управления. Питание насосов 14, 15 и 18 осуществляется от бака 19. В напорной гидролинии насоса 18 управления установлен предохранительный клапан 20 и регулируемый дроссель 21, ограничивающий расход рабочей жидкости, поступающий в рабочую полость регулятора 16 мощности. К напорной гидролинии насоса 18, являющейся управляющей магистралью подключены полости 22 и 23 управления ЭГУ 6 и 17, а полость 24 питания ЭГУ 17 подключена гидролинией к рабочей полости регулятора 16 мощности за дросселем 21. Три другие полости ЭГУ 17 сообщены со сливом.
Электромеханические преобразователи 25 и 26 ЭГУ 6 и 17 подключены к выходам электронных усилителей 27 и 28, входы которых подключены к выходам соответствующих преобразователей 29 и 30, которые преобразуют щиротно-импульсные сигналы в 20 непрерывные. Входы преобразователей 29 и 30 подключены к выходам широтно-импульс- ных модуляторов 31 пункта 4 управления.
Золотники ЭГУ 17 могут смещаться в любое крайнее положение, правое или левое 25 (в зависимости от знаков электрических сигналов, поступающих на электромеханические преобразователи 26), так как они симметричные, работают одной из внутренних кромок наружных поршеньков, а полости, заключенные между порщеньками, соедине- зо ны между собой и со сливом. При подаче электрического сигнала на электромеханический преобразователь 25, его якорь поворачивается, что вызывает смещение заслонки дифференциального управляющего элемента.
и 44 через щинные формирователи 45 и 46 по общей интерфейной щине электрически связаны с щиротно-импульсными модуляторами 31, измерительным устройством 39 и согласующим устройством 47, выход которого подключен к пускателям электродвигателей насосов 14 и 15 каждого гидроцилиндра 1 и 2.
Блоки 31, 39 и 47 электрически включены параллельно, так как они соединены посредством общей интерфейсной щины с контролерами 43 и 44 через щинные формирователи 45 и 46. Сигналы от контролера 43 или 44 поступают через общую щину на все блоки, но воспринимаются только тем блоком, которому они адресованы (каждый блок имеет код адреса). Шинные формирователи 45 и 46 (на микросхемах типа КР580 ВА86) имеют три рабочих состояния: передача сигналов от контролера к блокам, передача сигналов от блоков к контролеру и высокоомное состояние (сопротивление), что эквивалентно физическому отсоединению щинного формирователя от электрической схемы системы. Шинный формирователь 45 или 46 переводится в высокоомное состояние при отсутствии сигнала готовности от контролера 45 или 46.
Каждый микропроцессорный контролер 43 и 44 содержит узел самоконтроля его работы, состоящий из первого одновибра- тора 48, второго одновибратора 49 и схемы 50 контроля, вход которой подключен к микропроцессорному контролеру 43 (44), а выход - к входу первого одно- вибратора 48, выход которого связан с входами соответствующего щинного формирователя 45 (46), второго одновибратора 49 и
Это вызывает разбаланс гидравлического 35 усилителя 51. Выход второго одновибратора
40
45
моста, в результате чего появляется перепад давлений в торцах золотника. Под воздействием этого перепада золотник ЭГУ 6 перемещается на величину, пропорциональную сигналу, поступившему на электромеханический преобразователь 25.
Датчик положения каждой створки ворот состоит из двух бесконтактных сельсинов 32 и 33, валы которых механически соединены с валами цилиндрического редуктора 34, который посредством зубчатого сектора 35 и шестерни 36 связан со створками ворот 37, а створки ворот соединены шарнирно со щтоками 38 гидроцилиндров 1 и 2. Трехфазные выходные обмотки сельсинов 32 и 33 подключены к общепромышленной сети через понижающий трансформатор (выходное напряжение на сельсин 20 В), а однофазные входные обмотки сельсинов 32 и 33 подключены к входу измерительного уст-ройства 39.
Пульт 40 управления пункта 4 управления через буферные регистры 41 и 42 сое- 55 динен с двумя параллельно включенными самостоятельными микропроцессорными контролерами 43 и 44, соединенными между собой двусторонней связью. Контролеры 43
50
49 соединён с входом микропроцессорного контролера 43 (44), а выход усилителя 51 - с электронными ключами широтно-импульс- ных модуляторов 31, согласующего 47 и измерительного 39 ,устройств.
В напорную магистраль (основного насоса 15) подключены обратный клапан 52, фильтр 53 тонкой очистки масла и предохранительный клапан 54. В напорную гидролинию насоса дожима 14 подключен обратный клапан 55.
Каждый гидроцилиндр 1 и 2 содержит предохранительный блок 5, состоящий из двух аварийно-предохранительных элементов 56 и 57, каждой из которых представляет собой два фланца и сплошную прокладку между ними, а также из двух обратных клапанов 58 и 59 и электрогидравлического распределителя 60. Обратные клапаны 58 и 59 и аварийно-предохранительные элементы 56 и 57 попарно-параллельно соединены с поршневой 12 и штоковой 11 полостями гидроцилиндра (т. е. клапан 58 и устройство 56 сообщается с полостью 11 клапан 59 и устройство 57 - с полостью 12). Электрогидравлический распределитель 60 соединяет щтоковую 11 и поршневую 12
и 44 через щинные формирователи 45 и 46 по общей интерфейной щине электрически связаны с щиротно-импульсными модуляторами 31, измерительным устройством 39 и согласующим устройством 47, выход которого подключен к пускателям электродвигателей насосов 14 и 15 каждого гидроцилиндра 1 и 2.
Блоки 31, 39 и 47 электрически включены параллельно, так как они соединены посредством общей интерфейсной щины с контролерами 43 и 44 через щинные формирователи 45 и 46. Сигналы от контролера 43 или 44 поступают через общую щину на все блоки, но воспринимаются только тем блоком, которому они адресованы (каждый блок имеет код адреса). Шинные формирователи 45 и 46 (на микросхемах типа КР580 ВА86) имеют три рабочих состояния: передача сигналов от контролера к блокам, передача сигналов от блоков к контролеру и высокоомное состояние (сопротивление), что эквивалентно физическому отсоединению щинного формирователя от электрической схемы системы. Шинный формирователь 45 или 46 переводится в высокоомное состояние при отсутствии сигнала готовности от контролера 45 или 46.
Каждый микропроцессорный контролер 43 и 44 содержит узел самоконтроля его работы, состоящий из первого одновибра- тора 48, второго одновибратора 49 и схемы 50 контроля, вход которой подключен к микропроцессорному контролеру 43 (44), а выход - к входу первого одно- вибратора 48, выход которого связан с входами соответствующего щинного формирователя 45 (46), второго одновибратора 49 и
усилителя 51. Выход второго одновибратора
5 усилителя 51. Выход второго одновибратора
0
5
5
0
49 соединён с входом микропроцессорного контролера 43 (44), а выход усилителя 51 - с электронными ключами широтно-импульс- ных модуляторов 31, согласующего 47 и измерительного 39 ,устройств.
В напорную магистраль (основного насоса 15) подключены обратный клапан 52, фильтр 53 тонкой очистки масла и предохранительный клапан 54. В напорную гидролинию насоса дожима 14 подключен обратный клапан 55.
Каждый гидроцилиндр 1 и 2 содержит предохранительный блок 5, состоящий из двух аварийно-предохранительных элементов 56 и 57, каждой из которых представляет собой два фланца и сплошную прокладку между ними, а также из двух обратных клапанов 58 и 59 и электрогидравлического распределителя 60. Обратные клапаны 58 и 59 и аварийно-предохранительные элементы 56 и 57 попарно-параллельно соединены с поршневой 12 и штоковой 11 полостями гидроцилиндра (т. е. клапан 58 и устройство 56 сообщается с полостью 11, клапан 59 и устройство 57 - с полостью 12). Электрогидравлический распределитель 60 соединяет щтоковую 11 и поршневую 12
полости гидроцилиидра со сливом при включенном магните, при выключенном магните распределитель 60 разобщает полости 11 и 12.
Электрогидравлическая система привода содержит четыре реле 61-64 давления, каждое из которых гидравлически связано с соответствующей штоковой 11 или поршневой 12 полостью гидроцилиндров 1 и 2, а электрически с магнитом электрогидравлического распределителя 60, т. е. реле 61 (63) Ю давления связано гидравлически со штоковой полостью 11 гидроцилиндра 1 (2), а реле 62 (64) давления - с поршневой 12 гидроцилиндра 1 (2).
Управление гидравлическим распределителем 60 осуществляется электромагнитом. Напряжение на электромагниты распределителей 60 подается от реле давлений 62-61, 63 и 64. Как только давление в полостях 11 и 12 гидроцилиндров 1 и 2 повысится выше настройки реле 61-64 давлений, в последних 20 замыкаются контакты и напряжение (например, 220 В), подается на катушки электромагнитов распределителей 60: При снижении давления в полостях гидроцилиндров 1 и 2 контакты реле размыкаются и электромагниты распределителей обесточиваются. Реле 25 61-64 давления входят в состав аварийных блокировок.
В случае повышения давления в поршневой полости гидроцилиндра 1 (2) срабатывает реле 62 (64) давления, распределитель 60 сообщает штоковую 11 и поршневую 12 полости со сливом и между собой. Жидкость начинает вытесняться из полости 12 в бак и в трубопровод, соединяющий бак с полостью 11 через распределитель 60, а так как в полости 11 создается вакуум, то и
НИИ, а сельсин 33 уточняет координату што ка на 0,1 хода створки ворот.
Измерительное устройство 39 снимае сигнал напряжения с одной из фаз трех фазной обмотки сельсиона и однофазно обмотки, замеряет фазовн сдвиг между ни ми, который прямо пропорционален углу по ворота ротора сельсина, а соответственно и координате штока гидроцилиндра. Резуль таты измерения поступают на вход микро процессора.
Микропроцессорные контролеры - это стандартные устройства.
Пуль 40 управления состоит из ключа запуска микропроцессора и ключей выбора скоростных графиков движения створок во рот в технологических операциях.
Согласующее устройство 47 представляет собой набор оптронных тиристоров (напри мер, ТО2-10), количество которых соот ветствуют количеству объектов управления Основные насосы 15 в комплекте с регу лятором 16 мощности, насосом 18 управле ния, предохранительным клапаном 20 и дросселем известны.
Буферный регистр 41 (42) выполнен на триггерах, выходы которых зашунтированы большими емкостями.
Каждый ш }1нный формирователь 46 и 45 представляет собой микрос.хему (типа КР580 ВА86), которая имеет входы для переключения направления передачи сигнала и перевода в высокоомное состояние, что позволяет отключать передачу сигналов при отсутствии сигнала готовности.
Электрогидравлическая система привода двустворчатых ворот шлюза работает в двух .,.,,, режимах, выполняя операции «Открыть восопротивление в этом трубопроводе меньше рота и «Закрыть ворота. Рассмотрим эти чем в сливном. Поэтому жидкость перете-операции, выполняемые каждая по единому
кает из полости 12 в полость 11 гидро-оптимальному скоростному графику,
цилиндра 1 (2), а избыток рабочей жид-Выполнение операции «Открыть ворота.
кости вытесняется в бак, так как объемы полостей 11 и 12 различны.
ЭГУ 6 и 17 выпускаются в комплекте с электронными усилителями 27 и 28. Прег образователи 29 и 30 широтно-импульсных сигналов в непрерывные состоят из Стандартных элементов - ограничителя амплитуды и фильтра.
Широтно-импульсный модулятор 31 - стандартное устройство позволяющее подавать сигналы управления, пропорциональные заданной скорости движения створок ворот, на электронные усилители 27 и 28 через устройства 29 и 30.
Датчик пути выполнен из двух стандартных бесконтактных сельсинов (например, БД-501 А). Один сельсин (32) подключен к цилиндрическому редуктору таким
40
На пульте 40 управления оператором включается ключ операции «Открыть, в результате чего подается сигнал на буферные регистры 41 и 42, которые запоминают поданную команду и позволяют повторно запрашивать ее при случайном сбое в работе микропроцессорных контролеров 43 и 44, по 45 окончании технологической операции буферные регистры 41 и 42 обнуляются с игна- лами от микропроцессорных контролеров 43 и 44). От буферных регистров 41 и 42 сигнал подается на микропроцессорные контролеры 43 и 44, в которых записана программа этой технологической операции. Затем включается ключ «Запуск контролера. В контролерах формируются цифровые сигналы в соответствии с включенной программой. Програ.ммой предусмотрено, что
50
образом, что делает оборот за полный один из контролеров, например, 43 являетход затвора; а другой (33) - 10 обо- ся основным, а 44 - резервным,
ротов. Сельсин 32 определяет координатуКонтролер 43 через шинный формироваштока гидроцилиндра в первом приближе-тель 45 через интерфейсную шину подает
НИИ, а сельсин 33 уточняет координату штока на 0,1 хода створки ворот.
Измерительное устройство 39 снимает сигнал напряжения с одной из фаз трехфазной обмотки сельсиона и однофазной обмотки, замеряет фазовн сдвиг между ними, который прямо пропорционален углу поворота ротора сельсина, а соответственно, и координате штока гидроцилиндра. Результаты измерения поступают на вход микропроцессора.
Микропроцессорные контролеры - это стандартные устройства.
Пуль 40 управления состоит из ключа запуска микропроцессора и ключей выбора скоростных графиков движения створок ворот в технологических операциях.
Согласующее устройство 47 представляет собой набор оптронных тиристоров (например, ТО2-10), количество которых соответствуют количеству объектов управления. Основные насосы 15 в комплекте с регулятором 16 мощности, насосом 18 управления, предохранительным клапаном 20 и дросселем известны.
Буферный регистр 41 (42) выполнен на триггерах, выходы которых зашунтированы большими емкостями.
Каждый ш }1нный формирователь 46 и 45 представляет собой микрос.хему (типа КР580 ВА86), которая имеет входы для переключения направления передачи сигнала и перевода в высокоомное состояние, что позволяет отключать передачу сигналов при отсутствии сигнала готовности.
Выполнение операции «Открыть ворота.
0
На пульте 40 управления оператором включается ключ операции «Открыть, в результате чего подается сигнал на буферные регистры 41 и 42, которые запоминают поданную команду и позволяют повторно запрашивать ее при случайном сбое в работе микропроцессорных контролеров 43 и 44, по 5 окончании технологической операции буферные регистры 41 и 42 обнуляются с игна- лами от микропроцессорных контролеров 43 и 44). От буферных регистров 41 и 42 сигнал подается на микропроцессорные контролеры 43 и 44, в которых записана программа этой технологической операции. Затем включается ключ «Запуск контролера. В контролерах формируются цифровые сигналы в соответствии с включенной программой. Програ.ммой предусмотрено, что
0
один из контролеров, например, 43 являет7
10
сигналы на входы модуляторов 31 обоих гидроцилиндров 1 и 2, где они преобразовываются в широтно-импульсные сигналы и поступают на электронные усилители 27 и 28 через устройства 29 и 30. С выхода усилителей 27 и 28 непрерывные сигналы управления поступают на электромеханические преобразователи 25 и 26 электрогидравлических усилителей 6 и 17. Одновременно с выхода контролера 43 сигнал поступает на согласующее устройство 47, которое включает тиристорные пускатели электродвигателей основных насосов 15. Последние начинают разворачиваться при нулевой подаче, так как в рабочих полостях их регуляторов 16 мощности давление управле- j ния равно нулю. Это происходит за счет того, что, как только встроенные насосы упра вления 18 подают рабочую жидкость в полости 23 управления ЭГУ 17, золотники под воздействием электрических сигналов, поступающих на преобразователи 26, смещаются в ,20 крайнее положение и основной поток рабочей жидкости от насосов 18, проходя через дроссели 21 в регуляторы 16 мощности, сливается в бак через полости 24 питания усилителей 17. Сигнал управления, выда- ваемый микропроцессорным кон-тролером 43, непрерывно изменяется в функции времени, т. е. пропорционально запрограммированному закону перемещения створок 37 ворот и, соответственно, изменяется и положение золотников в усилителях 17. Золотники начинают прикрывать полости 24 питания ЭГУ 17, давление рабочей жидкости в регуляторах 16 мощности начинает повышаться, а расход насосов 15 увеличиваться пропорционально повышению давления жидкости в рабочих полостях регуляторов 16 мощности.
Рабочая жидкость из напорных гидролиний насосов 15 начинает поступать через обратные клапаны 52 и фильтра 53 в напорную магистраль 8 системы. Жидкость, поступив в полости 22 управления ЭГУ 6 от насосов 18 перемещает и.х золотники на величину, пропорциональную сигналу, поступившему на электромеханические преобразователи 25, т. е. на величину, пропорциональную начальной скорости движения створок 37, соединяя при этом полость 7 питания ЭГУ 6 через полость 9 со штрко- вой полостью 11 гидроцилиндров 1 и 2, а поршневую полость 12 через полости 10 и 13 ЭГУ 6 - со сливом. ЭГУ 6 в данном случае отслеживает скорость движения створок 37, а также создает подпор на сливе.
граммой в функции от времени и корректирует выходной сигнал управления. ЭГУ 6 регулируют потоки масла в напорных и сливных магистралях гидроцилиндров 1 и 2, отслеживают скорость движения створок 37 двустворчатых ворот и создают подпор на сливе. ЭГУ 17 регулируют производительность насосов 15 для обеспечения заданного графика движения створок.
Контролер 44 работает в режиме горячего резерва. По двусторонней связи он получает постоянно от микропроцессорного контролера 43 информацию о координате графика движения створок. Получая информацию через интерфейсную шину и шинный формирователь 46 от измерительного 39 и согласующего 47 устройств, контролер . 44 самостоятельно отрабатывает данную технологическую операцию аналогично контролеру 43 и готов в любой момент принять на себя функции основного контролера 43 и выдавать сигналы на исполнительные элементы.
Как только на пульте 40 управления включается ключ любой из операций в работу включаются цепи самоконтроля. Каждая схема контроля 50 получает от соответствующего ей микропроцессорного контролера 43 или 44 код теста самоконтроля и при его совпадении с заданным (что соответствует правильности работы контролеров) выдает импульс на одновибратор 48, который работает в режиме повторного запуска и выдает сигнал на усилитель 51 и второй одновибратор 49. Усилитель 51 выдает сигнал на включение электронных ключей широтно-импульсных модуляторов 31 и согласующего устройства 47. Одновибратор 49 цепи самоконтроля включается в работу в случае пропадания сигнала готовности, идущего от одновибратора 48, что говорит р том, что в контролере 43 произошел сбой. В этом случае одновибратор 48 закрывает проход сигналов через шинный формирователь 45 в направлении исполнительных элементов системы, а одновибратор 49 делает повторный запуск микропроцессорного контролера 43, допустившего случайный сбой, в этот момент контролер 43 по двусторонней связи подает сигнал контролеру 44 на про- 45 должение технологической операции. Контролер 44 берет на себя функцию основного и выдает сигналы через шинный формирователь 46 на входы модуляторов 31 и согласующего устройства 47. Контролер 43 самовосстанавливается после повторного за30
35
40
П™, ,е lair™ П, рабо- 0 -„а. .а„раш„ва« „„формаиик, о ходе «хtiui, D ш.г,,.„,4r-,,,,o,..H ППРПЯ1ГИИ пп пяустоооннеи свячая жидкость приводит в движение штоки 38 гидроцилиндров 1 и 2, а следовательно, и связанные шарнирно со штоками створки 37 ворот с начальной заданной скоростью. По мере движения створок ворот микропроцессорный контролер 43, получая информацию от датчиков пути (сельсинов 32 и 33), механически связанных со штоками гидроцилиндров, сравнивает ее с заданной пронологической операции по двусторонней связи от контролера 44, а также через шинный формирователь 45 от измерительного 39 и согласующего 47 устройств и начинает рабо- гг тать в режиме горячего резерва. Так про- исходит автоматический переход с одногр микропроцессорного контролера на другой. При воздействии неучтенных нагрузок на створки ворот в момент их закрытого или
0
j 20 ,
граммой в функции от времени и корректирует выходной сигнал управления. ЭГУ 6 регулируют потоки масла в напорных и сливных магистралях гидроцилиндров 1 и 2, отслеживают скорость движения створок 37 двустворчатых ворот и создают подпор на сливе. ЭГУ 17 регулируют производительность насосов 15 для обеспечения заданного графика движения створок.
Контролер 44 работает в режиме горячего резерва. По двусторонней связи он получает постоянно от микропроцессорного контролера 43 информацию о координате графика движения створок. Получая информацию через интерфейсную шину и шинный формирователь 46 от измерительного 39 и согласующего 47 устройств, контролер . 44 самостоятельно отрабатывает данную технологическую операцию аналогично контролеру 43 и готов в любой момент принять на себя функции основного контролера 43 и выдавать сигналы на исполнительные элементы.
Как только на пульте 40 управления включается ключ любой из операций в работу включаются цепи самоконтроля. Каждая схема контроля 50 получает от соответствующего ей микропроцессорного контролера 43 или 44 код теста самоконтроля и при его совпадении с заданным (что соответствует правильности работы контролеров) выдает импульс на одновибратор 48, который работает в режиме повторного запуска и выдает сигнал на усилитель 51 и второй одновибратор 49. Усилитель 51 выдает сигнал на включение электронных ключей широтно-импульсных модуляторов 31 и согласующего устройства 47. Одновибратор 49 цепи самоконтроля включается в работу в случае пропадания сигнала готовности, идущего от одновибратора 48, что говорит р том, что в контролере 43 произошел сбой. В этом случае одновибратор 48 закрывает проход сигналов через шинный формирователь 45 в направлении исполнительных элементов системы, а одновибратор 49 делает повторный запуск микропроцессорного контролера 43, допустившего случайный сбой, в этот момент контролер 43 по двусторонней связи подает сигнал контролеру 44 на про- 45 должение технологической операции. Контролер 44 берет на себя функцию основного и выдает сигналы через шинный формирователь 46 на входы модуляторов 31 и согласующего устройства 47. Контролер 43 самовосстанавливается после повторного за30
35
40
0 -„а. .а„раш„ва« „„формаиик, о ходе «х-„а. .а„раш„ва« „„формаиик, о ходе «х,,.„,4r-,,,,o,..H ППРПЯ1ГИИ пп пяустоооннеи свянологической операции по двусторонней связи от контролера 44, а также через шинный формирователь 45 от измерительного 39 и согласующего 47 устройств и начинает рабо- тать в режиме горячего резерва. Так про- исходит автоматический переход с одногр микропроцессорного контролера на другой. При воздействии неучтенных нагрузок на створки ворот в момент их закрытого или
открытого положения используется предохранительный 5, который предохраняет гидрв- цилиндр от изгиба при воздействии на створки неучтенных кратковременных нагрузок большой амплитуды, возникающих при навале судна на ворота со стороны нижнего подходного канала, а также от обратной волны. Как показывает практика эксплуатации шлюзов эти нагрузки значительно превышают устойчивость штока гидроцилиндра. Предохранители 56 и 57 являются дублирующими устройствами и должны срабатывать в случае отказа гидравлического распределителя 60 или реле давлений 61-64. Блок 5 выполнен симметрично, так как возможны навалы судна на створки ворот со стороны камеры. Таким образом, в процессе эксплуатации электрогидравлической системы привода двустворчатых ворот судоходного шлюза при сильном ветре, волне (10-30 см), протечках в системе створки ворот расходятся, датчик, установленный в створе ворот (не показан), размыкается. Ворота имеют большую парусность (их размеры: высота - 8-20 м, ширина 12-17,5 м). Створки ворот расходятся на величину 50- 100 мм, а при длительной остановке до 150 мм. Расхождение створок на эту величину не считается аварийной ситуацией, но в этом случае подать команду на наполнение камеры невозможно из-за размыкания контактов датчика, установленного в створе ворот. В целях экономии энергии (т. е. для того, чтобы не включать всю систему для полного отворения створок ворот), а также чтобы не отвлекать диспетчера от исполнения им основных функций, в систему введен насос 14 дожатия, который представляет собой насос малой производительности (например НШ-10, имеющий расход 10 л/мин и максимальное давление 16 мПа). В программе мащины 44 (43) заложено включение насоса 14 дожатия в случае расхождения створок при неработающем приводе. Как только створки сходятся, датчик в створе ворот отключает насос 14 дожима. В случае повышения давления в полости 12 при работающем насосе 14 срабатывает реле 62 (64) давления, которое отключает насос 14 и одновременно включает электромагнит распределителя 60. Как только давление в полости 12 снижается ниже давления настройки реле 62 (64), блок 5 устанавливается в исходное положение.
Таким образом, блок 5 обеспечивает слив рабочей жидкости из полостей II и 12 гидроцилиндров 1 и 2, в которых повысилось давление вследствие воздействия нерасчетных нагрузок, и раскрытие двустворчатых ворот до прекращения воздействия нагрузок. В случае повышения давления в поршневой полости 12 гидроцилиндров 1, 2 выше давления настройки реле 62 (64) давления, реле срабатывает и, воздействуя на магнит распределителя 60, перемещает его золотник в
5
крайнее положение, сообщив, таким образом, поршневую полость 12 со штоковой 11 гидроцилиндра 1 (2) и со сливом. Происходит перетекание жидкости из одной полости в другую, а избыток жидкости идет на слив. В случае повыщения давления з штоковой полости 11 гидроцилиндра 1 (2) срабатывает реле 61 (63) давления, распределитель 60 сообщает щтоковую 1 1 и поршневую 12 полости со сливом. Происходит также перетекание рабочей жидкости со штоковой полости И в поршневую 12 полость гидроцилиндра I (2), а дефицит жидкости восполняется из бака, так как в поршневой полости 12 создается вакуум. При прекращении воздействия нагрузки на створки ворот давление в системе стабилизируется, реле давления снимает питание с магнита распределителя 60 и его золотник под воздействием пружины возвращается в нормальное закрытое положение, разобщая при этом штоковую 11 и поршневую 12 полости гидроцилиндров 1 и 2. Если по каким- либо причинам реле давления 61-64 и электрогидравлический распределитель 60 не срабатывают, то при повышении давления 5 в штоковой полосити 11 гидроцилиндра 1 (2) рабочая жидкость срезает сплошную прокладку аварийно-предохранительного устройства 57 и сообщает эту полость со сливом. Вакуум, образованный при этом в поршневой полости 12, открывает обратный клапан 59 и обеспечивает подсос рабочей
0
0
жидкости из бака для заполнения поршневой полости 12 гидроцилиндра 1 (2).
В случае повышения давления в поршневой полости 12 аварийно-предохранительное
устройство 57 открывается и сообщает эту полость со сливом, рабочая жидкость идет на слив. В полости 11 образуется вакуум. Обратный клапан 58 открывается и происходит подсос рабочей жидкости из бака в щтоковую полость 11 гидроцилиндра 1 (2).
При срабатывании блока 5 створки ворот не болтаются, так как нагрузка дейсгвует в одном направлении. При снятии нагрузки блок а втоматически закрывается и разобщает полости 11 и 12. Если срабатывают аварийно-предохранительные устройства 56 и 57, створки также не «болтаются, так как их масса значительна (масса каждой створки 200-400 т) и 1/3 створки постоянно находится в воде, в результате чего создается дополнительное сопротивление перемещению створки. Кроме того, «болтание створок аварийной ситуации вызвать не может, так как каждая створка имеет упоры в конечных положениях.
Толщина и материал прокладки аварийного предохранительного устройства 57 (56) выбирается в зависимости от прочностных характеристик штоков 38 гидроцилиндров 1 и 2. Реле 61-64 давления настраиваются на давление несколько ниже давления срабаты
вания аварийного предохранительного устройства 57 (56).
Операции «Закрыть ворота осуществляется аналогично операции «Открыть ворота, но золотник ЭГУ 6 смещается в противоположную сторону так, чтобы сообщить напорную гидролинию 8 с порщневой полостью 12 гидроцилиндров 1 и 2, а сливную - со штоковой полость 11 гидроцилиндров.
подключены Соответственно к управляющей и напорной магистралям отдельной для каждой створки насосной станции, а также кинематически связанные со створками две пары сельсинов, связанные линиями связи с измерительным устройством на диспетчерском пульте управления, отличающаяся тем, что, с целью повыщения надежности работы привода, она снабжена подключенными к поршневым и щтоковым полостям каждого
После створения двустворчатых ворот, 10 гидроцилиндра реле давления, электрически связанными с предохранительными блоками каждого гидроцилиндра, пасосами дожа- тия с обратными клапанами на выходах, установленными на насосных станциях кажв случае воздействия на них неучтенных нагрузок, створки 37 могут разойтись. Тогда датчики, установленные в створе ворот, размыкаются и в работу включаются наки связанными с предохранительными блоками каждого гидроцилиндра, пасосами дожа- тия с обратными клапанами на выходах, установленными на насосных станциях кажсосы дожима 14 до полного створения во- ,, дого гидроцилиндра -и подключенными к их
Синхронизация движения штоков 38 гидроцилиндров 1 и 2 в технологических операциях обеспечивается двумя датчиками Ъути (каждый датчик пути содержит два
поршневым полостям, причем каждый предохранительный блок выполнен в виде двух обратных клапанов, включенных параллельно с аварийно-предохранительными элементами между порщневой и штоковой полоссельсина 32 и 33), измерительным уст- 20 тями гидроцилиндра и сливом, а также
ройством 39 и микропроцессорным контролером 43 (44). Сельсины 32 и 33 определяют координату каждого штока 38 гидроцилиндров 1 и 2 по величине фазового сдвига. Измерительное устройство 39 измеряет вели- чину фазового сдвига на каждом датчике пути, результаты измерения поступают в микропроцессорный контролер 43 (44), который сравнивает эти величины и выдает корректирующие сигналы управления на
электрогидрораспределителями управляемого реле давления, имеющего два входных канала, подключенных к полостям гидроцилиндра, и два выходных канала, подключенных к сливу.
2. Система по п. 1, отличающаяся тем, что каждая насосная станция выполнена в виде основного насоса и подключенного к его регулятору мощности через регулируемый дроссель дополнительного насоса с предэлектромеханические преобразователи 25 и 30 охранительным клапаном, напорной
26 ЭГУ 6 и 17 обоих гидроцилиндров,
которые регулируют расход рабочей жидкости таким образом, чтобы координаты штоков 38 гидроцилиндров 1 и 2 имели одинаковую величину.
Использование изобретения позволяет электромеханическим преобразователем, увеличить пропускную способность шлюза подключенным через дополнительные усили- приблизительно на 20% на счет того, что схема управления предусматривает автоматический переход на резервную ЭВМ в слурали с установленными на ее входе обратным клапаном, фильтром и предохранительным клапаном, управляющей магистрали, подключенной к выходу дополнительного насоса, и электрогидравлического усилителя с
тель и преобразователь к дополнительному широтно-импульсному модулятору на диспетчерском пункте, причем три исполнительные полости дополнительного электротехнологический цикл шлюзования не преры- 40 гидравлического преобразователя соединены вается. Кроме того, повышает надежность со сливом, полость питания подключена к
регулятору мощности основного насоса, а полость управления - к управляющей мачае выхода из строя основной, при этом
работы электрогидравлической системы привода.
подключены Соответственно к управляющей и напорной магистралям отдельной для каждой створки насосной станции, а также кинематически связанные со створками две пары сельсинов, связанные линиями связи с измерительным устройством на диспетчерском пульте управления, отличающаяся тем, что, с целью повыщения надежности работы привода, она снабжена подключенными к поршневым и щтоковым полостям каждого
гидроцилиндра реле давления, электрически связанными с предохранительными блоками каждого гидроцилиндра, пасосами дожа- тия с обратными клапанами на выходах, установленными на насосных станциях кажпоршневым полостям, причем каждый предохранительный блок выполнен в виде двух обратных клапанов, включенных параллельно с аварийно-предохранительными элементами между порщневой и штоковой полосэлектрогидрораспределителями управляемого реле давления, имеющего два входных канала, подключенных к полостям гидроцилиндра, и два выходных канала, подключенных к сливу.
2. Система по п. 1, отличающаяся тем, что каждая насосная станция выполнена в виде основного насоса и подключенного к его регулятору мощности через регулируемый дроссель дополнительного насоса с предохранительным клапаном, напорной
рали с установленными на ее входе обратным клапаном, фильтром и предохранительным клапаном, управляющей магистрали, подключенной к выходу дополнительного насоса, и электрогидравлического усилителя с

| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления гидроприводом двустворчатых ворот и затворов наполнения низконапорного шлюза | 1990 |
|
SU1767076A1 |
| Электрогидравлическая система привода двустворчатых ворот шлюза | 1991 |
|
SU1775527A1 |
| Электрогидравлическая система привода двустворчатых ворот шлюза | 1989 |
|
SU1680858A1 |
| Устройство управления гидроприводом затвора шлюза | 1986 |
|
SU1406295A1 |
| Устройство управления гидроприводом затвора шлюза | 1985 |
|
SU1282081A1 |
| Электрогидропривод двустворчатых ворот шлюза | 1987 |
|
SU1506015A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА ПРИВОДА ДВУСТВОРЧАТЫХ ВОРОТ СУДОХОДНОГО ШЛЮЗА | 2012 |
|
RU2496940C1 |
| Устройство управления гидроприводом затвора шлюза | 1990 |
|
SU1745815A1 |
| Гидропривод гидротехнического затвора | 1989 |
|
SU1680859A1 |
| Гидропривод гидротехнического затвора | 1988 |
|
SU1574719A1 |
Изобретение относится к управлению системами гидроавтоматики силового привода мощных механизмов и может быть использовано в гидравлических механизмах судоходных шлюзов. Цель изобретения состоит в повышении надежности работы. Электрогидравлическая система привода двустворчатых ворот шлюза содержит электронный пункт управления с двумя микропроцессорными контролерами связанными двусторонней связью, каждый из которых имеет узел самоконтроля его работы и два буферных регистра для связи пульта с соответствующим контролером. Буферные регистры и узлы самоконтроля позволяют запоминать поданную команду, производить повторное автоматическое включение заданной технологической операции в случае возникновения случайного сбоя контролера, контролировать правильность отработки запрограммированных сигналов контролером, осуществить автоматический переход на резервную микропроцессорную ЭВМ в случае случайного сбоя или неисправности основной, не прерывая технологической операции. Наличие в электрогидравлической системе привода двустворчатых ворот шлюза двух электрогидравлических усилителей, подключенных в напорную магистраль каждого гидроцилиндра, позволяет регулировать подачу двух насосных станций в поршневую и штоковую полости гидроцилиндров, а наличие двух предохранительных блоков надежно защищает штоки гидроцилиндров от воздействия на них неучтенных нагрузок. 2 з.п. ф-лы, 1 ил.
Формула изобретения
ными модуляторами на диспетчерском пункте 55 подключенного к шине интерфейса, а также управления, средняя полость каждого элек-второго одновибратора, включенного между
трогидравлического усилителя подключена к сливу, а полости управления и питания
трогидравлических усилителей каждого гидроцилиндра, электромеханические преобразователи которых через усилители и преобразователи соединены с широтно-импульсвыходом первого одновибратора и контролером, при этом первый одновибратор нодклюгистрали насосной станции.
подключенного к шине интерфейса, а также второго одновибратора, включенного между
выходом первого одновибратора и контролером, при этом первый одновибратор нодключен также к шинному формирователю, а терфейса с широтно-импульснымн модуля- усилитель является общим для обоих элек-торами и согласующим устройством пульта
тронных блоков и связан через шину ин-управления.
,2
г JL
| Устройство управления гидроприводом затвора шлюза | 1986 |
|
SU1406295A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
