(Л
С
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения вектора дисбаланса | 1986 |
|
SU1350513A1 |
| Устройство для определения вектора дисбаланса | 1983 |
|
SU1193474A1 |
| ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО К БАЛАНСИРОВОЧНОМУ СТАНКУ | 1992 |
|
RU2054644C1 |
| Измерительное устройство к балансировочному станку | 1990 |
|
SU1746232A1 |
| ДЕМОДУЛЯТОР ФАЗОМАНИПУЛИРОВАННЫХ СИГНАЛОВ | 2008 |
|
RU2393641C1 |
| Измерительное устройство балансировочного станка | 1977 |
|
SU748156A1 |
| Устройство для измерения величины и угла дисбаланса изделий | 1981 |
|
SU974172A1 |
| УСТРОЙСТВО ЦИФРОВОЙ КОГЕРЕНТНОЙ ОБРАБОТКИ СИГНАЛОВ | 1990 |
|
SU1818989A1 |
| Синхронно-фазовый фильтр | 1991 |
|
SU1798889A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ АМПЛИТУДЫ И ФАЗЫ ДИСБАЛАНСА | 1992 |
|
RU2045006C1 |
Изобретение относится к балансировочной технике Цель - повышение производительности и расширение технологических возможностей устройства Для этого устройство дополнено цилиндрической втулкой с меткой и эксцентриком с цилиндрической наружной поверхностью, измерителем углового положения эксцентрика, подключенным выходом через электронный ключ на один из входов сумматора, другой вход которого через буферный регистр подключен к выходу измерителя фазы дисбаланса. . Электронный ключ и буферный регистр управляются компаратором частоты на два выхода, подключенным входом к выходу датчика метки. Устройство позволяет оперативно выставить ротор в заданное положение для уравновешивания по параметрам измеренного вектора дисбаланса. 2 ил.
Изобретение относится к балансировочной технике и может быть использовано в измерительном устройстве балансировочного станка для определения величины и места дисбаланса роторов различных объектов, в том числе и турбомаши- ны.
Известно устройство, содержащее последовательно соединенные датчик вибрации, перемножитель и интегратор синфазной компоненты, выход которого предназначен для соединения с указателем величины дисбаланса, умножитель частоты импульсов, выполненный, например, с переменным коэффициентом умножения, последовательно соединенные второй перемножитель, вход которого соединен с выходом датчика вибрации, и интегратор квадратурной компоненты,
соединенный выходом с входами компаратора нуля, компаратора плюса и компаратора минуса, выходы которых соединены с соответствующими (вторым, третьим и четвертым) управляющими входами умножителя частоты импульсов, соединенного выходом с входом счетчика импульсов, информационный выход которого соединен с входами формирователей синусного и косинусного опорных напряжений, выходы которых соединены соответственно с вторыми входами первого и второго перемножителей, схему измерения фазы, выполненную, например, в виде последовательно соединенных триггера, входы которого представляют собой первый и второй входы схемы измерения фазы, второго счетчика импульсов, второй вход которого является третьим входом схемы измерения
-xl
сл ел о
00
to
фазы, и индикатора фазы, и датчик метки, причем выход датчика метки соединен с первым входом умножителя частоты импульсов и схемы измерения фазы, с вторым входом интеграторов синфазной и квадратурной компонент, выход переноса первого счетчика импульсов соединен с вторым входом схемы измерения фазы, третий вход которой соединен с выходом умножителя частоты импульсов.
Для выполнения операции по устранению дисбаланса необходимо фазу вектора дисбаланса перевести в угол (место) установки (удаления) груза по окружности на роторе, т.е.-выставить (развернуть) ротор в балансировочном станке легким (тяжелым) местом в заданное положение с требуемой точностью. Известное устройство этими признаками не обладает, что снижает как производительность, так и технологические возможности.
Цель изобретения - повышение производительности за счет сокращения времени выставки ротора после его остановки в заданное положение и расширение технологических- возможностей за счет возможности автоматизации выставки ротора для устранения дисбаланса.
Поставленная цель достигается тем, что устройство, содержащее последовательно соединенные датчик вибрации, перемножитель и интегратор синфазной компоненты, р выход которого предназначен для соединения с указателем величины дисбаланса, датчик метки, умножитель частоты импульсов, выполненный, например, с переменным коэффициентом умножения, последовательное соединенные второй перемножитель, вход которого соединен с выходом датчика вибрации, и интегратор квадратурной компоненты, соединенный своим выходом с входами компаратора нуля, компаратора плюса и компаратора минуса, выходы которых соединены и соответствующими (с вторым, третьим и четвертым) управляющими входами умножителя частоты импульсов, соединенного выходом с входом счетчика импульсов, информационный выход которого соединен с входами формирователей синусного и косинусного опорных напряжений, соединенных выходами соответственно с вторыми входами первого и второго перемножителей, схему измерения фазы, выполненную, например, в виде последовательно соединенных триггера, входы которого представляют собой первый и второй входы схемы измерения фазы, второго счетчика импульсов, второй вход которого является третьим входом схемы измерения фазы, и индикатора фазы, и датчик метки,
причем выход датчика метки соединен с первым входом умножителя частоты импульсов и схемы измерения фазы, с вторым входом интеграторов синфазной и квадратурной компонент, выход переноса первого счетчика импульсов соединен со вторым входом схемы измерения фазы, третий вход которой соединен с выходом умножителя частоты импульсов, снабжено цилиндриче0 ской втулкой с меткой и эксцентриком с цилиндрической наружной поверхностью, предназначенными для соосного закрепления на оси привода, измерителем углового положения эксцентрика, выполненным в ви5 де первого и второго бесконтактных преобразователей перемещений, установленных вблизи цилиндрической поверхности эксцентрика по взаимно перпендикулярным осям в радиальной плоскости, третьего и
0 четвертого перемножителей, первые входы которых соединены с входами первого и второго бесконтактных преобразователей перемещений, последовательно соединенных генератора, делителя частоты и форми5 рователя единичных сигналов фиксированной частоты косинусоидальный и синусоидальный выходы которых соедине ны с вторыми входами третьего и четвертого перемножителей, первого сумматора, вхо0 ды которого соединены с выходами третьего и четвертого перемножителей и схемы измерения угла, первый вход которого соединен с выходом первого сумматора, второй - с синусоидальным выходом формирователя
5 единичного сигнала фиксированной частоты, а третий - с выходом генератора, электронным ключом, вход которого соединен с выходом схемы измерения угла, являющимся выходом измерителя углового положения
0 эксцентрика, индикатором, вторым сумматором, первый вход которого соединен с выходом электронного ключа, а выход - с входом индикатора, буферным регистром, вход которого соединен с выходом второго
5 счетчика, а выход - с вторым входом второго сумматора, схемой И, первый вход которой соединен с выходом компаратора, а выход - с входом управления буферного регистра и компаратором частоты, первый вход которо0 го предназначен для подачи сигнала внешней уставки частоты балансировки, второй вход соединен с выходом датчика метки, выход О соединен с управляющим входом электронного ключа, а выход Т - с вторым
5 входом схемы И.
В качестве бесконтактных измерительных преобразователей перемещения более предпочтительными являются вихретоко- вые преобразователи параметрического типа, обладающие высокой точностью,
помехозащищенностью и надежностью в самых жестких условиях эксплуатации,
Введение в известное устройство перечисленных блоков позволяет после остановки ротора по показаниям индикатора выставить ротор в заданное (требуемое) положение для устранения дисбаланса, а перенос метки на втулку исключает операцию нанесения метки на роторе, все это повышает удобство (технологичность) и производительность уравновешивания.
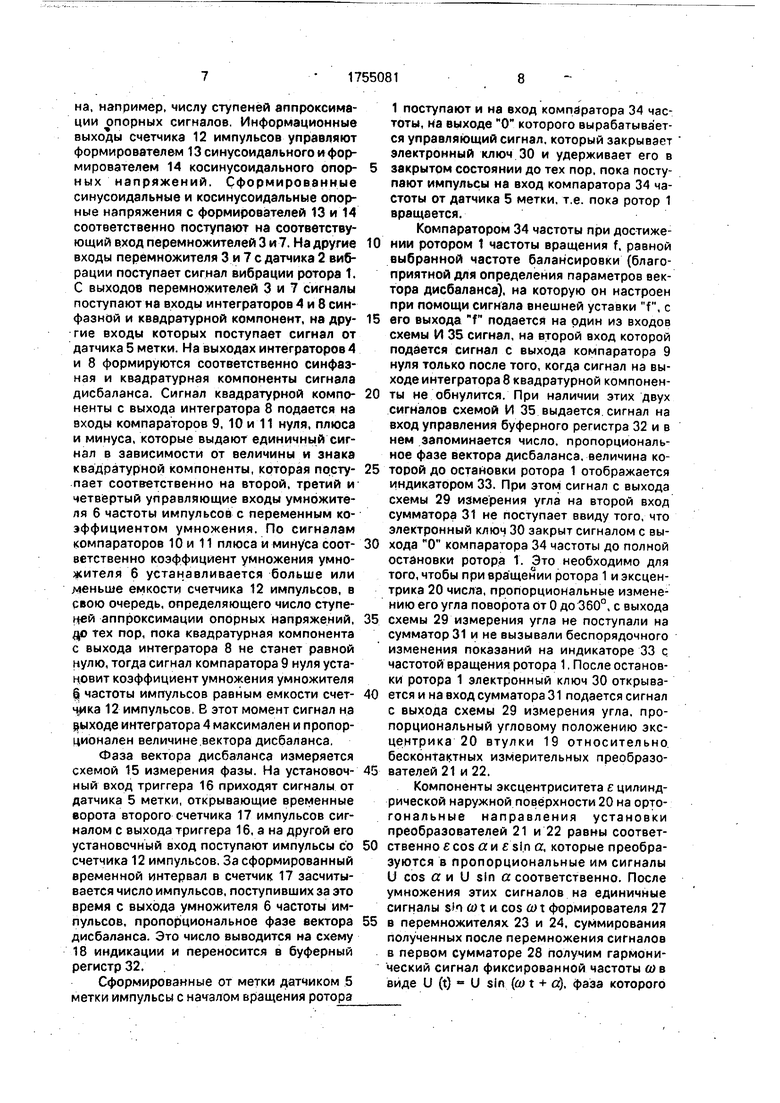
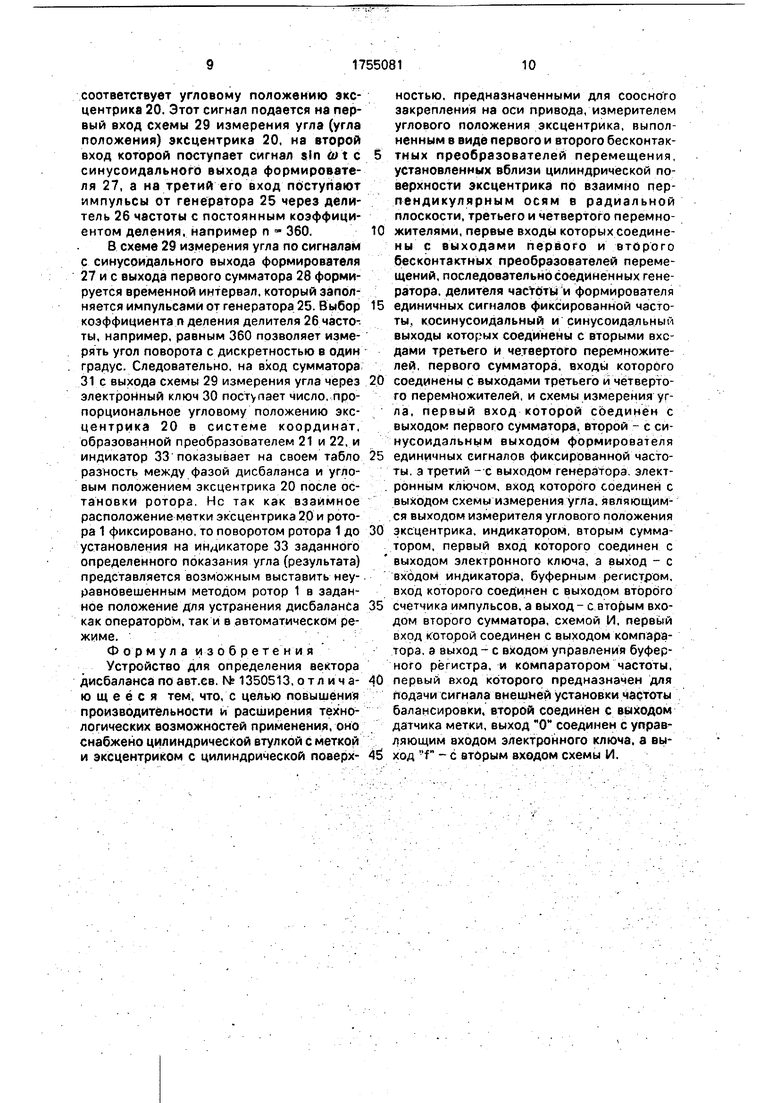
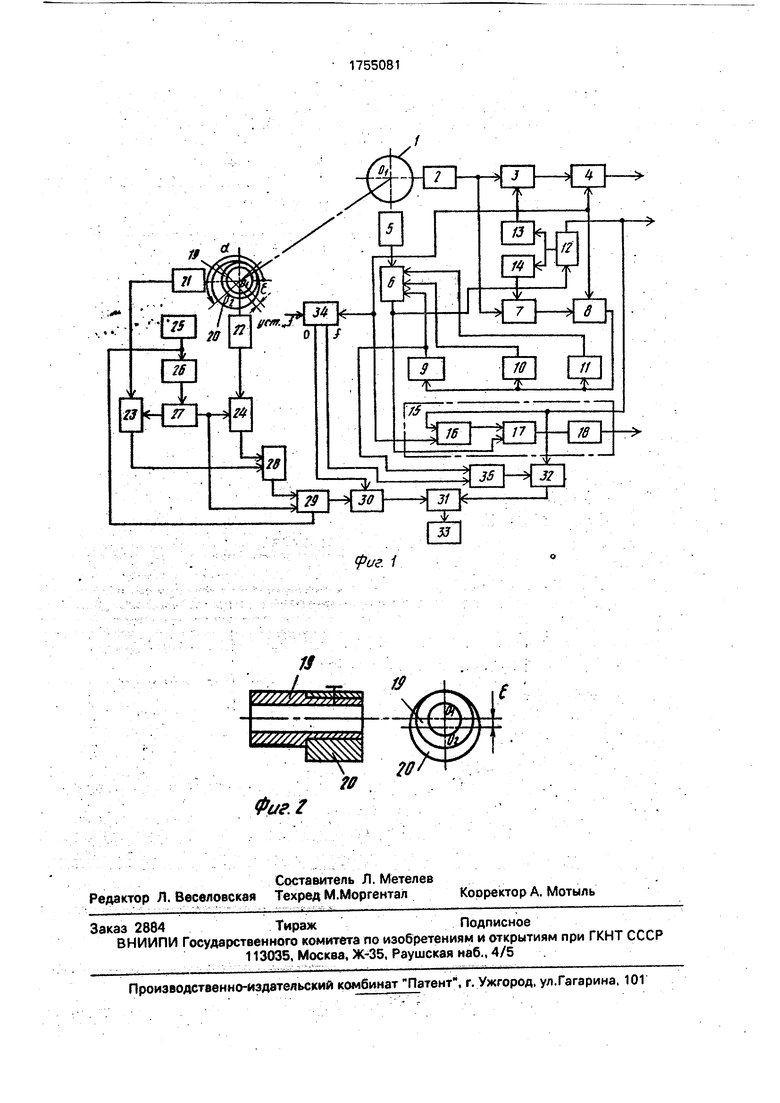
На фиг.1 представлена структурная схема предлагаемого устройства; на фиг.2 - втулка с эксцентриком.
Устройство для определения вектора дисбаланса ротора 1 содержит последовательно соединенные датчик 2 вибрации, перемножитель 3 и интегратор 4 синфазной компоненты, выход которого предназначен для соединения с указателем величины дисбаланса, датчик 5 метки, умножитель 6 частоты импульсов, выполненный с переменным коэффициентом умножения, последовательно соединенные вторрй перемножитель 7, вход которого соединен с выходом датчика 2 вибрации, и интегратор 8 квадратурной компоненты, соединенный своим выходом с входом компаратора 9 нуля компаратора 10 плюса, компаратора 11 минуса, выходы которых соединены с соответствующими (вторым, третьим, четвертым) входами умножителя 6 частоты импульсов, соединенного выходом с входом первого счетчика 12 импульсов, информационный выход которого соединен с входами формирователей 13 и 14 синусного и косинусного опорных напряжений, соединенных выходами соответственно с вторыми входами первого перемножителя 3 и второго перемножителя 7, схему 15 измерения фазы, выполненную в виде последовательно соединенных триггера 18, входы которого представляют первый и второй входы схемы 15 измерения фазы, второго счетчика 17 импульсов, второй вход которого является третьим входом схемы 15 измерения фазы, и индикатора 18 фазы (схема 18 индикации), причем выход датчика 5 метки соединен с первым входом схемы 15 измерения фазы, с вторым входом интегратора 4 синфазной компоненты и интегратора 8 квадра- турной компоненты, выход переноса первого счетчика 12 импульсов соединен с вторым входом схемы 15 измерения фазы, третий вход последней соединен с выходом умножителя 6 частоты импульсов.
Кроме этого, устройство содержит цилиндрическую втулку 19 с меткой и эксцентриком 20 с цилиндрической наружной поверхностью, которые предназначены для
соосного закрепления на валу приводя (не показан), однозначно связанного с ротором 1, первый 21 и второй 22 бесконтактные преобразователи перемещений, устэнов- 5 ленные вблизи цилиндрической поверхности эксцентрика 20 по взаимно перпендикулярным осям в радиальной плоскости и соединенные выходами соответственно с входами третьего 23 и четвертого 24
0 перемножителей, последовательно соединенные генератор 25, делитель 26 частоты и формирователь 27 единичного сигнала фиксированной частоты, косинусоидальный выход которого соединен с вторым входом
5 третьего перемножителя 23, а синусоидальный выход - с вторым входом четвертого перемножителя 25, выходы третьего 23 и четвертого 24 перемножителей соединены с входами первого сумматора 28 подключен0 ного выходом к одному из входов схемы 29 измерения угла, второй вход которой соединен с синусоидальным выходом формирователя 27, а третий ее вход - с выходом генератора 25.
5 Выход схемы 29 измерения угла через электронный ключ 30 соединен с одним из входов второго сумматора 31, который вторым входом соединен с выходом буферного регистра 32, а выходом - с индикатором 33.
0 Компаратор 34 частоты имеет два входа: первый предназначен для подачи сигнала внешней уставки f - частоты балансировки, а второй соединен с выходом датчика 5 метки - и два вывода О и f, причем выход
5 О соединен с входом управления электронного ключа 30, а выход f - с вторым входом схемы И 35, первый вход которой соединен с выходом компаратора 9 Схема И 35 выходом соединена с входом управ0 ления (с входом Защелка) буферного регистра 32,соединенного другим входом с выходом второго счетчика 17 схемы 15 измерения фазы. Датчикб метки устанавливают вблизи метки над цилиндриче5 ской втулкой 19. Взаимное положение метки и эксцентриситета цилиндрической поверхности эксцентрика 20 фиксировано и может совпадать
Устройство работает следующим обра0 зом.
Датчик 5 метки при вращении ротора 1 вместе с втулкой 19 формирует импульсы, которые поступают на вход умножителя 6 частоты. На выходе умножителя 6 частоты
5 формируется последовательность импульсов с частотой, необходимой для формирования, например, методом ступенчатой аппроксимации опооных сигналов. Эта последовательность импульсов поступает на счетчик 12 импульсов, емкость которого равна, например, числу ступеней аппроксимации опорных сигналов. Информационные выходы счетчика 12 импульсов управляют формирователем 13 синусоидального и формирователем 14 косинусоидального опорных напряжений. Сформированные синусоидальные и косинусоидальные опорные напряжения с формирователей 13 и 14 соответственно поступают на соответствующий вход перемножителей 3 и 7. На другие входы перемножителя 3 и 7 с датчика 2 вибрации поступает сигнал вибрации ротора 1. С выходов перемножителей 3 и 7 сигналы поступают на входы интеграторов 4 и 8 синфазной и квадратурной компонент, на другие входы которых поступает сигнал от датчика 5 метки. На выходах интеграторов 4 и 8 формируются соответственно синфазная и квадратурная компоненты сигнала дисбаланса. Сигнал квадратурной компоненты с выхода интегратора 8 подается на входы компараторов 9, 10 и 11 нуля, плюса и минуса, которые выдают единичный сигнал в зависимости от величины и знака квадратурной компоненты, которая поступает соответственно на второй, третий и четвертый управляющие входы умножителя 6 частоты импульсов с переменным коэффициентом умножения. По сигналам компараторов 10 и 11 плюса и минуса соответственно коэффициент умножения умножителя б устанавливается больше или меньше емкости счетчика 12 импульсов, в свою очередь, определяющего число ступеней аппроксимации опорных напряжений, Of) тех пор, пока квадратурная компонента с выхода интегратора 8 не станет равной нулю, тогда сигнал компаратора 9 нуля установит коэффициент умножения умножителя § частоты импульсов равным емкости счет- чижа 12 импульсов В этот момент сигнал на выходе интегратора 4 максимален и пропорционален величине вектора дисбаланса,
Фаза вектора дисбаланса измеряется схемой 15 измерения фазы. На установочный вход триггера 16 приходят сигналы от датчика 5 метки, открывающие временные ворота второго счетчика 17 импульсов сигналом с выхода триггера 16, а на другой его установочный вход поступают импульсы со счетчика 12 импульсов. За сформированный временной интервал в счетчик 17 засчитывается число импульсов, поступивших за это время с выхода умножителя 6 частоты импульсов, пропорциональное фазе вектора дисбаланса. Это число выводится на схему 18 индикации и переносится в буферный регистр 32.
Сформированные от метки датчиком 5 метки импульсы с началом вращения ротора
1 поступают и на вход компаратора 34 частоты, на выходе О которого вырабатывается управляющий сигнал, который закрывает электронный ключ 30 и удерживает его в
закрытом состоянии до тех пор, пока поступают импульсы на вход компаратора 34 частоты от датчика 5 метки, т.е. пока ротор 1 вращается.
Компаратором 34 частоты при достижении ротором 1 частоты вращения f, равной выбранной частоте балансировки (благоприятной для определения параметров вектора дисбаланса), на которую он настроен при помощи сигнала внешней уставки f, с
его выхода f подается на один из входов схемы И 35 сигнал, на второй вход которой подается сигнал с выхода компаратора 9 нуля только после того, когда сигнал на выходе интегратора 8 квадратурной компоненты не обнулится. При наличии этих двух сигналов схемой И 35 выдается сигнал на вход управления буферного регистра 32 и в нем запоминается число, пропорциональное фазе вектора дисбаланса, величина которой до остановки ротора 1 отображается индикатором 33. При этом сигнал с выхода схемы 29 измерения угла на второй вход сумматора 31 не поступает ввиду того, что электронный ключ 30 закрыт сигналом с выхода О компаратора 34 частоты до полной остановки ротора 1. Это необходимо для того, чтобы при вращении ротора 1 и эксцентрика 20 числа, пропорциональные изменению его угла поворота от 0 до 360°, с выхода
схемы 29 измерения угла не поступали на сумматор 31 и не вызывали беспорядочного изменения показаний на индикаторе 33 с частотой вращения ротора 1. После остановки ротора 1 электронный ключ 30 открывэется и на вход сумматора 31 подается сигнал с выхода схемы 29 измерения угла, пропорциональный угловому положению эксцентрика 20 втулки 19 относительно бесконтактных измерительных преобразователей21 и 22.
Компоненты эксцентриситета Ј цилиндрической наружной поверхности 20 на орто- гональные направления установки преобразователей 21 и 22 равны соответственно Ј cos а и Ј sin а, которые преобразуются в пропорциональные им сигналы U cos or и U sin а соответственно. После умножения этих сигналов на единичные сигналы sin GM и cos (t) формирователя 27
в перемножителях 23 и 24, суммирования полученных после перемножения сигналов в первом сумматоре 28 получим гармонический сигнал фиксированной частоты о) в виде U (t) - U sin (ш t + я), фаза которого
соответствует угловому положению эксцентрика 20. Этот сигнал подается на первый вход схемы 29 измерения угла (угла положения) эксцентрика 20, на второй вход которой поступает сигнал sin w t с синусоидального выхода формирователя 27, а на третий его вход поступают импульсы от генератора 25 через делитель 26 частоты с постоянным коэффициентом деления, например п - 360.
В схеме 29 измерения угла по сигналам с синусоидального выхода формирователя 27 и с выхода первого сумматора 28 формируется временной интервал, который заполняется импульсами от генератора 25. Выбор коэффициента п деления делителя 26 частоты, например, равным 360 позволяет измерять угол поворота с дискретностью в один градус. Следовательно, на вход сумматора 31 с выхода схемы 29 измерения угла через электронный ключ 30 поступает число, пропорциональное угловому положению эксцентрика 20 в системе координат, образованной преобразователем 21 и 22, и индикатор 33 показывает на своем табло разность между фазой дисбаланса и угловым положением эксцентрика 20 после остановки ротора Не так как взаимное расположение метки эксцентрика 20 и ротора 1 фиксировано, то поворотом ротора 1 до установления на индикаторе 33 заданного определенного показания угла (результата) представляется возможным выставить неуравновешенным методом ротор 1 в заданное положение для устранения дисбаланса как оператором, так и в автоматическом режиме.
Формула изобретения Устройство для определения вектора дисбаланса по авт.св. № 1350513, отличающееся тем, что, с целью повышения производительности и расширения технологических возможностей применения, оно снабжено цилиндрической втулкой с меткой и эксцентриком с цилиндрической поверхностью, предназначенными для соосного закрепления на оси привода, измерителем углового положения эксцентрика, выполненным в виде первого и второго бесконтэк- 5 тных преобразователей перемещения, установленных вблизи цилиндрической поверхности эксцентрика по взаимно перпендикулярным осям в радиальной плоскости, третьего и четвертого перемно0 жителями, первые входы которых соединены с выходами первого и второго бесконтактных преобразователей перемещений, последовательно соединенных генератора, делителя частоты и формирователя
5 единичных сигналов фиксированной частоты, косинусоидальный и синусоидальный выходы которых соединены с вторыми входами третьего и четвертого перемножителей, первого сумматора, входы которого
0 соединены с выходами третьего и четвертого перемножителей, и схемы измерения угла, первый вход которой соединен с выходом первого сумматора, второй - с синусоидальным выходом формирователя
5 единичных сигналов фиксированной частоты а третий - с выходом генератора электронным ключом, вход которого соединен с выходом схемы измерения угла, являющимся выходом измерителя углового положения
0 эксцентрика, индикатором, вторым сумматором, первый вход которого соединен с выходом электронного ключа, а выход - с входом индикатора, буферным регистром, вход которого соединен с выходом второго
5 счетчика импульсов, а выход - с вторым входом второго сумматора, схемой И, первый вход которой соединен с выходом компаратора, а выход - с входом управления буферного регистра, и компаратором частоты,
0 первый вход которого предназначен для подачи сигнала внешней установки частоты балансировки, второй соединен с выходом датчика метки, выход О соединен с управляющим входом электронного ключа, а выё ход Г - с вторым входом схемы И.
У////У/}
f
шш
Фиг,
Iff
фаг 1
| Устройство для определения вектора дисбаланса | 1986 |
|
SU1350513A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
