Изобретение относится к робототехни-;; ке, точному приборо- и машиностроению.
Известен привод микроманипулятора, содержащий корпус с размещенным в нем пьезокерамическим вибратором, состоящим из двух пьезокерамических стержней, располЬжейных под углом друг к Другу и сопряженных своими концами с подвижным звеном (Авт. св. СССР № 960004, кл. В 7/00.1982). В пьезбэлементах возбуждаются импульсные механические колебания, преобразуемые в перемещение подвижного звена благодаря фрикционному взаимодействию с ним пьезрэлементов, Устройство имеет малую нагрузочную способность и недолговечно вследствие фрикционно-толчко- вого характера передачи усилий на подвижное звено.
Известен привод мйкроманипулятора, содержащий подвижное звено с зубчатой рейкой и два призматических пьезоэлем ен- та с. накладками на концах, сопряженными с зубчатой рейкой. Устройство обеспечива ет невысокую точность перемещЕёний подвижного звена из-за наличия предпочтительных дискретных положений при фиксации вследствие использования зубчатой рейки, а также имеет малый срок службы из-за износа зубчатой поверхности рейки.
Наиболее близким к изобретению является привод микроманипулятор аТ содержащий расположенные соосно вал (подвижное звено) и пьезоэпемент вформе MtvwH),KnpaffvBo- пспожным концам которого поЛ мые фиксаторь, сопряясенныес валом .Недостатком устройства являются узкиетехнопогичеоадё возможности вследствие малюй величины шага перемещения: Целью изобретения является расшире- ;нйе технологических возможностей за счет увеличения шага перемещения.
Это достигается тем, что привод микроманипулятора, содержащий пьезоэлемент, противоположные концы которого связаны через управляемые фиксаторы с подвижным звеном, снабжен механическими звеньями, расположенными в продольной
со
С
vj
01
СА) СО
плоскости относительно оси подвижного звена, наклонно к этой оси, при этом один конец каждого из механических звеньев связан с пьезоэлементом, а другой - с соответствующим фиксатором.
Расширение технологических возможностей устройство обусловлено использованием радиального усилия, развиваемого пьезоэлементом одновременно с осевым усилием, для дополнительного перемещения подвижного звена.
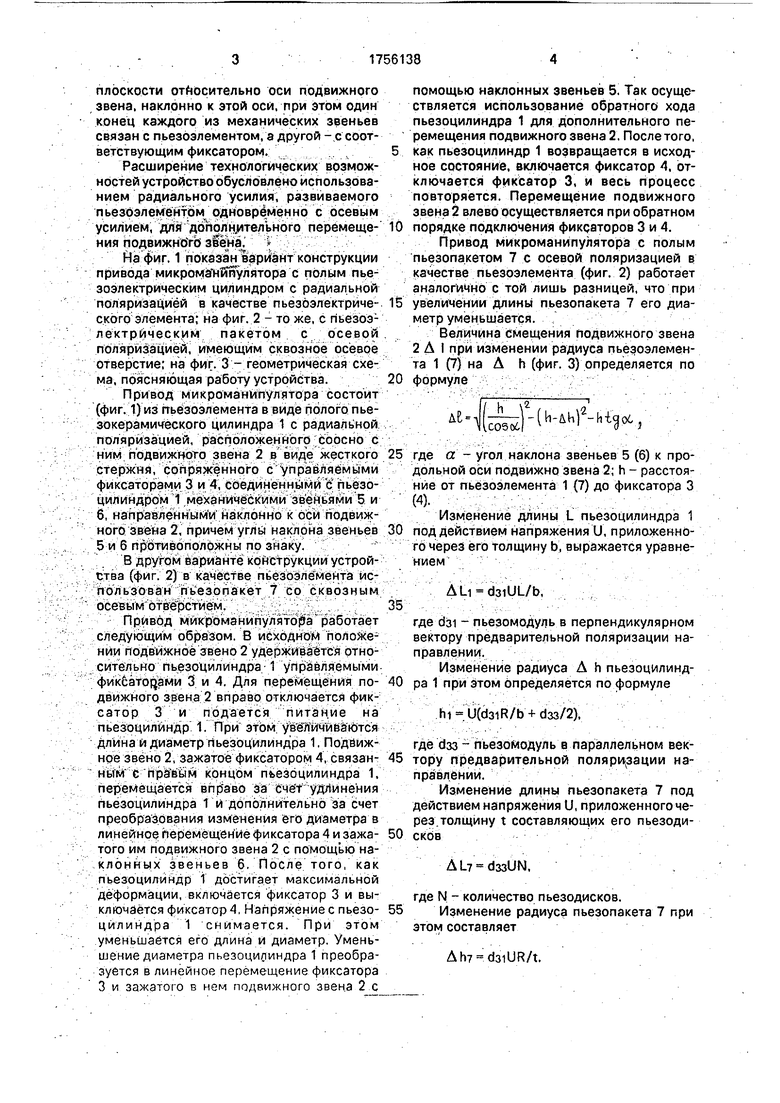
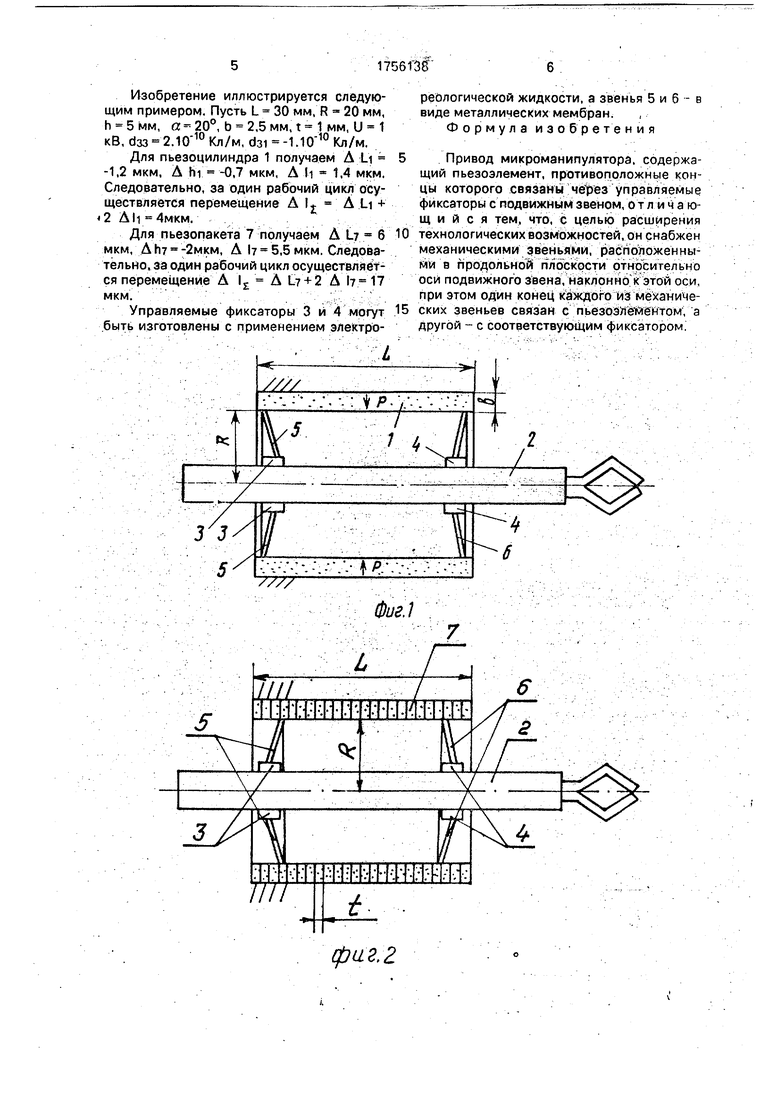
На фиг. 1 показан вариант конструкции привода микрома нигТулятора с полым пьезоэлектрическим цилиндром с радиальной поляризацией в качестве пьезоэлектрического элемента; на фиг. 2 - то же, с пьезоэлектрическим пакетом с осевой поляризацией, имеющим сквозное осевое отверстие; на фиг. 3 - геометрическая схема, поясняющая работу устройства.
Привод микроманипулятора состоит (фиг. 1) из ггьезоэлемента в виде полого пье- зокерамического цилиндра 1 с радиальной поляризацией, расположенного соосно с ним подвижного звена 2 в виде жесткого стержня, сопряженного с управляемыми фиксаторами 3 и 4, соединенными с пьезо- цилиндром 1 механическими звеньями 5 и 6, направленными наклонно к оси подвижного звена 2, причем углы наклона звеньев 5 и 6 противоположны по знаку.
В другом варианте конструкции устройства (фиг. 2) в качестве пьезоэлемента использован пьезопакет 7 со сквозным осевым отве рстием.
Привод микроманипулятора работает следующим образом. В исходном положении подвижное звено 2 удерживается относительно пьезоцилиндра 1 управляемыми фикбатор ами 3 и 4. Для перемещения подвижного звена 2 вправо отключается фиксатор 3 и подается питание на пьезоцилиндр 1. При этом увеличибаются длина и диаметр пьезоцилиндра 1, Подвижное звено 2, зажатое фиксатором 4, связанным с правым концом пьезоцилиндра 1, перемещается впр аво за счет удлинения пьезоцилиндра 1 и дополнительно за счет преобразования изменения его диаметра в линейное перемещение фиксатора 4 и зажатого им подвижного звена 2 с помощью на- клонных звеньев 6 После того, как пьезоцилиндр 1 достигает максимальной деформации, включается фиксатор 3 и выключается фиксатор 4 Напряжение с пьезо- цилиндра 1 снимается. При этом уменьшается его длина и диаметр Уменьшение диаметра пьезоцилиндра 1 преобразуется в линейное перемещение фиксатора 3 и зажатого в нем подвижного звена 2 с
помощью наклонных звеньев 5. Так осуществляется использование обратного хода пьезоцилиндра 1 для дополнительного перемещения подвижного звена 2. После того,
как пьезоцилиндр 1 возвращается в исходное состояние, включается фиксатор 4, отключается фиксатор 3, и весь процесс повторяется. Перемещение подвижного звена 2 влево осуществляется при обратном
порядке подключения фиксаторов 3 и 4.
Привод микроманипулятора с полым пьезопакетом 7 с осевой поляризацией в качестве пьезоэлемента (фиг. 2) работает аналогично с той лишь разницей, что при
увеличении длины пьезопакета 7 его диаметр уменьшается.
Величина смещения подвижного звена 2 А I при изменении радиуса пьезоэлемента 1 (7) на Д h (фиг. 3) определяется по
формуле
1& (-Щ«,
где а - угол наклона звеньев 5 (6) к продольной оси подвижно звена 2; h - расстояние от пьезоэлемента 1 (7) до фиксатора 3
(4).
Изменение длины L пьезоцилиндра 1 под действием напряжения U, приложенного через его толщину Ь, выражается уравнением
35
AU d3iUL/b,
где бз1 - пьезомодуль в перпендикулярном вектору предварительной поляризации направлении.
Изменение радиуса A h пьезоцилинд- ра 1 при этом определяется по формуле
hi U(d3iR/b + d33/2).
где ds3 пьезомодуль в параллельном век- тору предварительной поляризации направлении.
Изменение длины пьезопакета 7 под действием напряжения U, приложенного через толщину t составляющих его пьезоди- сков
A L dsaUN,
где N - количество пьезодисков. Изменение радиуса пьезопакета 7 при этом составляет
Ah7 d3iUR/t.
Изобретение иллюстрируется следующим примером. Пусть L 30 мм, R 20 мм, h 5 мм, а - 20°, b 2,5 мм, t 1 мм, U 1 кВ, d33 - 2. Кл/м, d3i -1. Кл/м.
Для пьезоцилиндра 1 получаем A LI -1,2 мкм, A hi -0,7 мкм, A h 1,4 мкм. Следовательно, за один рабочий цикл осуществляется перемещение A Ij. A Li + 2 АН 4мкм.
Для пьезопакета 7 получаем A L 6 мкм, Дг17 -2мкм, А I 5,5 мкм. Следовательно, за один рабочий цикл осуществляется перемещение A lЈ A L + 2 A мкм.
Управляемые фиксаторы 3 и 4 могут быть изготовлены с применением электро
5
реологической жидкости, а звенья 5 и б - в виде металлических мембран.
Формула изобретения
Привод микроманипулятора, содержащий пьезоэлемент, противоположные концы которого связаны через управляемые фиксаторы с подвижным звеном, отличающийся тем, что, с целью расширения технологических возможностей, он снабжен механическими звеньями, расположенными в продольной плоскости относительно оси подвижного звена, наклонно к этой оси, при этом один конец каждого из механических звеньев связан с пьезоэлегаентом, а другой - с соответствующим фиксатором.
| название | год | авторы | номер документа |
|---|---|---|---|
| Пьезоэлектрический вибростенд | 1989 |
|
SU1747977A1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 1990 |
|
RU1829863C |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДАТЧИК УДАРА | 2013 |
|
RU2533539C1 |
| Способ изготовления пьезоэлектрического вибродатчика типа "Тендем | 1988 |
|
SU1525585A1 |
| Способ получения пористого композиционного пьезоэлектрического материала | 2024 |
|
RU2836848C1 |
| Высокочастотный пьезоэлектрический керамический материал на основе феррита висмута и феррониобата свинца | 2024 |
|
RU2838303C1 |
| УСИЛИВАЮЩИЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ АКТЮАТОР ПОВЫШЕННОЙ ТОЧНОСТИ ПОЗИЦИОНИРОВАНИЯ | 2016 |
|
RU2624773C1 |
| Устройство для получения вращательного движения Абрамова Валентина Алексеевича (Абрамова В.А.) | 2016 |
|
RU2654690C9 |
| Низкочастотный пьезоэлектрический керамический материал на основе феррита висмута и феррониобата свинца | 2024 |
|
RU2836755C1 |
| ПЬЕЗОПОЛИМЕРНАЯ КОМПОЗИЦИЯ И ИЗДЕЛИЕ, ВЫПОЛНЕННОЕ ИЗ НЕЁ | 2001 |
|
RU2207356C2 |
Сущность изобретения: в исходном положении подвижное звено 2 удерживается управляемыми фиксаторами 3 и 4. Для перемещения звена 2, например, вправо на один шаг отключается фиксатор 3 и подается питание на пьезоцилиндр 1, что приводит к увеличению его длины и диаметра.. Таким образом, для перемещения звена 2 используется одновременно радиально|а СЧ|т наклонного положения механйчесшх Швев 5 и 6 и осевое усилия, развиваеШШ Же зоэ- лементом 1. После смещения звенаГ2 включается фиксатор 3 и выключается фиксатдр 4, а затем снимается напряжение с пьезоэ- лемента 1.3 ил,,..,.
фа 2. г
фаг.З
| Харди Дж.У | |||
| Активная оптика - ТИИЭР, 1978, т | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
| Солесос | 1922 |
|
SU29A1 |
