5. Последняя перемещает полупрозрачное зеркало 6 в положение, при котором пучок лучей после отражения попадет в центр фотоприемника 8. Для компенсации непрямолинейности перемещения каретки 5 служит фотоприемник 7 Смещение триппель-приз- мы 13 вдоль оси, перпендикулярной оси измерителя 2 перемещений, приводит к появ лению разности хода между пачками лучей отраженных от триппель-призм 12, 13 которая фиксируется измерителем 2 перемещений. Это смещение пропорционально углу поворота платформы 11 2 ил
| название | год | авторы | номер документа |
|---|---|---|---|
| Интерферометр для измерения углов | 1986 |
|
SU1401271A1 |
| ИНТЕРФЕРОМЕТР ДЛЯ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ СКАНЕРА ЗОНДОВОГО МИКРОСКОПА | 2015 |
|
RU2587686C1 |
| Устройство для считывания графической информации | 1984 |
|
SU1241178A1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА ПОВОРОТА ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2094755C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ ОПТИКО-ЛОКАЦИОННАЯ СИСТЕМА | 2005 |
|
RU2292566C1 |
| Интерферометр для измерения перемещений | 1980 |
|
SU934212A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАЗМЕРОВ ДЕТАЛЕЙ | 1999 |
|
RU2158416C1 |
| ИНТЕРФЕРОМЕТР ДЛЯ ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЙ | 1997 |
|
RU2146354C1 |
| ОПТИЧЕСКИЙ ИЗМЕРИТЕЛЬ ДАВЛЕНИЯ | 1997 |
|
RU2113697C1 |
| Интерферометр для контроля параметров оптических криволинейных вогнутых поверхностей | 1987 |
|
SU1516768A1 |
Изобретение относится к измерительной технике и может быть использовано для измерения углоа поворота объектов Цель изобретения - повышение точности измерений При повороте, платформы триппель- призма 13 смещается по двум взаимно перпендикулярным осям. Смещение трип- пель- призмы 13 вдоль оптической оси измерителя 2 перемещений вызывает смещение отраженного от не пучка лучей. Этот пучок лучей попадает H;I фошприемник 8. по сигналу которого блок 9 управления формирует сигналы, подаваемые на ггрйвод 10 каретки $ 8 6 7 ЛL/. %1 сл о $ VI 
Изобретение отйосится к Измерительной технике и может быть использовано для измерения углов поворота объектов.
Известны интерферометры с диапазоном измерения больше 90°, содержащие 2 триппель-призмы куб и устройство слежения за лучом.
Однако диапазон измерения такого интерферометра не превышает 95°
Известен интерферометр для измерения углов поворота объектов, содержащий основание, последовательно установленные на основании измеритель перемещений, компенсирующее устройство в виде каретки, установленной с возможностью перемещения вдоль двух взаимно перпендикулярных осей, одна из которых параллельная оптической оби измерителя перемещений, последовательно установленных на каретке отражателя с отражающим и пропускающим покрытием и двух фотоприемников, размещенных на так, что один из них расположен на оптической оси измерителя перемещений/а второй - на оси. перпендикулярной оптической оси и проходящей через точку ее пер есе- чения с отражателем, блока управления, входы которого подключены к фотогТри ем- никэм, и привода каретки, входы которого подключены к выходам блока управления, светоделитель, входная гра нь которого оптически сопряжена с отражателем, пентап- ризму, входная грань которой огтгичвск сопряжена со светоделительной гшэско- стью светоделителя, платформу, установленную с возможностью поворота ti две триппель-призмы. установленные на платформе так, что их входные грани оптически сопряжены соответственно с выходной гранью светоделителя и выходной гранью пентапризмы, три шкива, один из которых установлен на основании так, что его ось симметрии совпадает с осью поворота платформы, а второй и третий установлены на платформе с возможностью поворота вокруг осей, параллельных оси поворота плат- Формы и связаны с первым шкивом с помощью гибких кольцевых лент, оси всех шкивов лежат на одной прямой а триппельпризмы размещены соответственно на втором и третьем шкивах так, что их вершины совмещены с осями поворота шкивов
Однако диапазон измерений устройства ограничен и не превышает 120°
Цель изобретения - повышение точно- сти измерений
Для этого интеоферометр для измерения углов, содержащий основание, установленные на основании измеритель перемещений, оптически связанный с ним светоделитель, и компенсирующее устройство, каретку, установленную с возможностью перемещения вдоль оси параллельно
оптической оси измерителя перемещений компенсирующее устройство, выполненное в виде установленных на каретке полупрозрачного зеркала и двух фотоприемников расположенных в двух взаимно-перпендикулярных плоскостях, и блока управления, входы которого подключены к выходам фо- топрмемников, привода каретки, вход кото- рйго подключен к выходу блока управления, платформу, установленную с возможностью
поворота, два шкива, один из которых установлен на основании так, что его ось симметрии совпадает с осью поворота платформы, второй - установлен на плат- Форме с возможностью поворота вокруг
оси, параллельной оси поворота платформы и связан с первым гибкой кольцевой лентой, две триппель-призмы, одна из которых оптически связана с полупрозрачным зеркалом и установлена на одном из шкивов так
что ее веримма совмещена с осью поворота шкива, снабжен вторым измерителем перемещений, установленным параллельно первому, третьей и четвертой триппель- призмами, и вторым светоделителем, причем вторая триппель-призма установлена между первым измерителем перемещений и компенсирующим устройством и оптически связана с полупрозрачным зеркало - что- рой светоделитель и третья триппепь-призма установлены между компенсирующим устройством и вторым измерителем перемещений и оптически связаны с последним и четвертой триппель-призмой установленной на каретке.
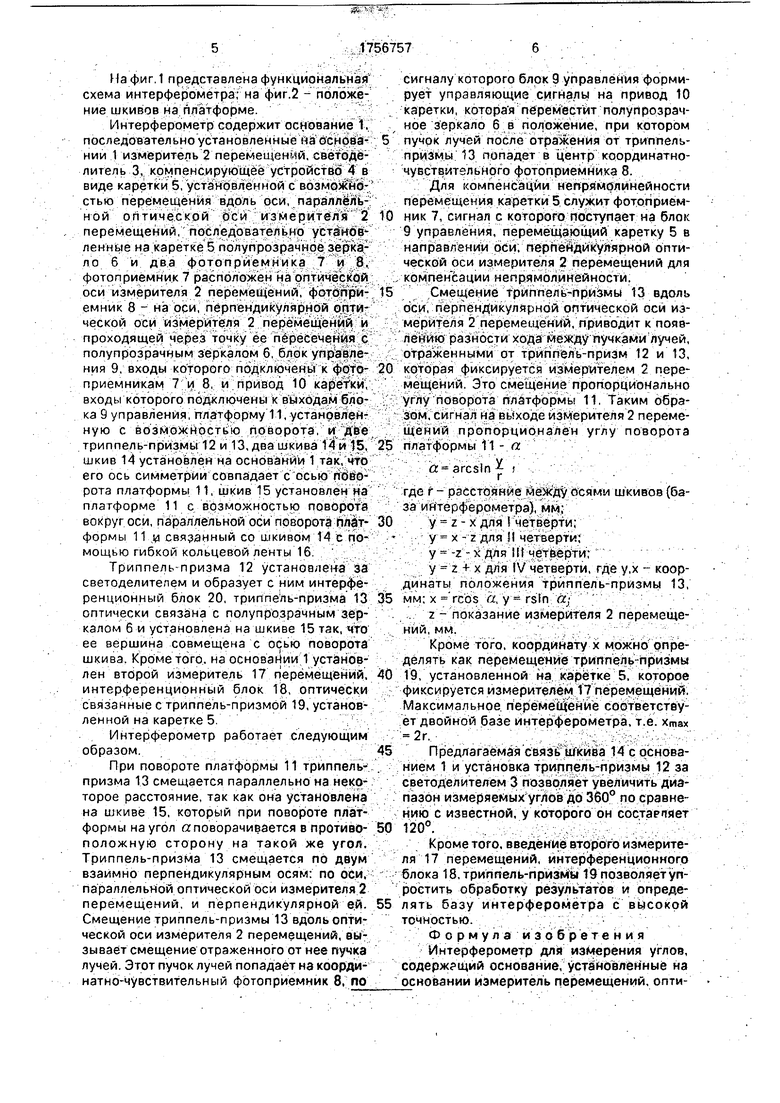
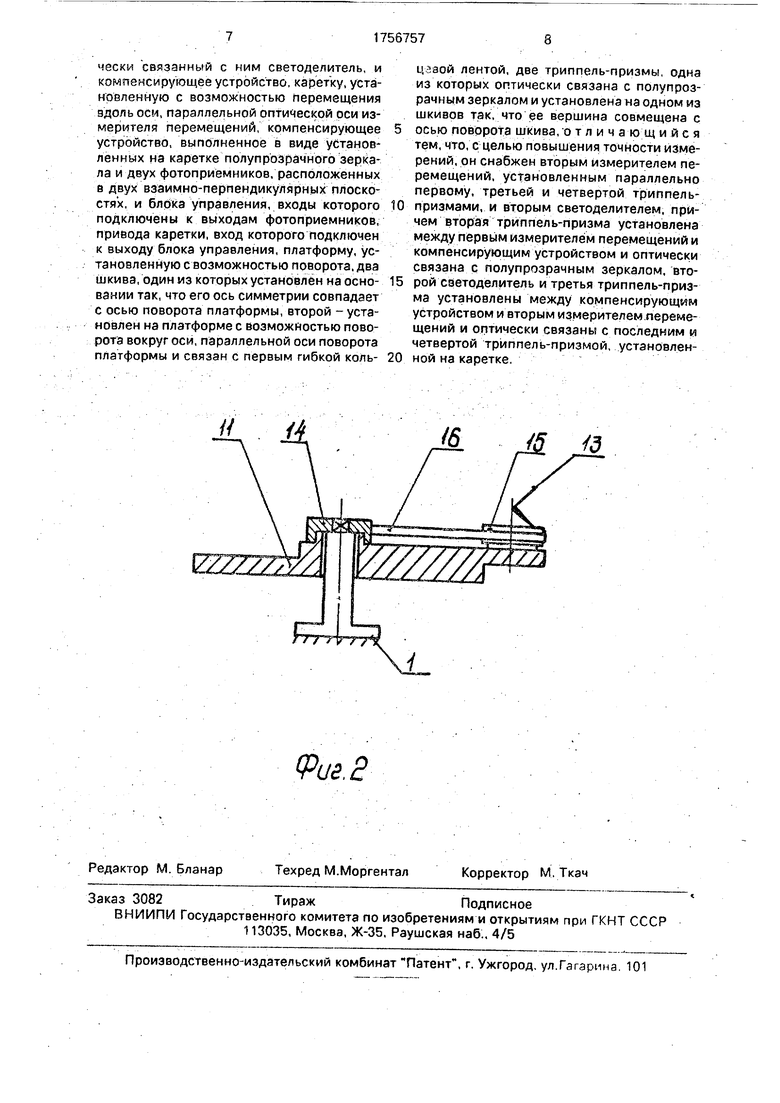
На фиг 1 представлена функциональная схема интерферометра; на фиг.2 - положение шкивов на платформе
Интерферометр содержит основание 1. последовательно установленные на основа- нии 1 измеритель 2 перемещений, светоделитель 3, компенсирующее устройство 4 в виде каретки 5, установленной с возможностью перемещения вдоль оси, параллёл ь- ной оптической оси измерителя 2 перемещений, последовательно установ-- ленные на каретке 5 полупрозрачное зеркало 6 и два фотоприемника 7 и 8. фотоприемник 7 расположен на оптический оси измерителя 2 перемещений, фотопри- емник 8 - на оси, перпендикулярной оптической оси измерителя 2 перемещений и проходящей через точку ее пересечения с полупрозрачным зеркалом б, блок управления 9, входы которого подключены к фото- приемникам 7 и 8, и привод 10 каретки, входы которого подключены к выходам блока 9 управления, платформу 11, установленную с возможностью поворота, и две триппель-призмы 12 и 13, два шкива 14 и t5, шкив 14 установлен на основании 1 так, что его ось симметрии совпадает с осью пово- рота платформы 11, шкив 15 установлен на платформе 11 с возможностью поворота вокруг оси, параллельной оси поворота плат- формы 11 vs связанный со шкивом 14 с помощью гибкой кольцевой ленты 16
Триппель призма 12 установлена за светоделителем и образует с ним интерференционный блок 20, триппель-призма 13 оптически связана с полупрозрачным зеркалом 6 и установлена на шкиве 15 так, что ее вершина совмещена с осью поворота шкива. Кроме того, на основайии 1 установлен второй измеритель 17 перемещений, интерференционный блок 18, оптически связанные с триппель-призмой 19, установленной на каретке 5
Интерферометр работает следующим образом
При повороте платформы 11 триппель- призма 13 смещается параллельно на некоторое расстояние, так как она установлена на шкиве 15, который при повороте платформы на угол «поворачивается в противо- положную сторону на такой же угол. Триппель-призма 13 смещается по двум взаимно перпендикулярным осям: по оси, параллельной оптической оси измерителя 2 перемещений, и перпендикулярной ей. Смещение триппель-призмы 13 вдоль оптической оси измерителя 2 перемещений, вызывает смещение отраженного от нее пучка лучей. Этот пучок лучей попадает на коорди- натно-чувствительный фотоприемник 8, по
сигналу которого блок 9 управления формирует управляющие сигналы на привод 10 каретки, котора я переместит полупрозрачное зеркало 6 в положение, при котором пучок лучей после отражения от триппель- призмы 13 попадет в центр координатно- чувствительного фотоприемника 8.
Для компенсации непрямолинейности перемещения каретки 5 служит фотоприемник 7, сигнал с которого поступает на блок 9 управления, перемещающий каретку 5 в направлении оси. перпендикулярной оптической оси измерителя 2 перемещений для компенсации непрямолинейности.
Смещение триппель-призмы 13 вдоль оси, перпендикулярной оптической оси измерителя 2 перемещений, приводит к появлению разности хода между пучками лучей, отраженными от триппеяь-призм 12 и 13, которая фиксируется измерителем 2 перемещений. Это смещение пропорционально углу поворота платформы 11. Таким образом, сигнал на выходе измерителя 2 перемещений пропорционален углу поворота платформы 11 - а
a- arcsln
где г - расстояние между осями шкивов (база интерферометра), мм;
у z - х для четверти;
у х - z для II четверти;
у -z - х для ill четверти;
у z + х для IV четверти, где у,х - координаты положения триппель-призмы 13, мм; х rcos а, у rsln «;
г - показание измерителя 2 перемещений, мм.
Кроме того, координату х можно определять как перемещение триппель-призмы 19, установленной на каретке 5, которое фиксируется измерителем 17 перемещений. Максимальное перемещение соответствует двойной базе интерферометра, т.е. хтах 2г.
Предлагаемая связь шкива 14 с основанием 1 и установка триппель-призмы 12 за светоделителем 3 позволяет увеличить диапазон измеряемых углов до 360° по сравнению с известной, у которого он состарпяет 120°.
Кроме того, введение второго измерителя 17 перемещений, интерференционного блока 18, триппель-призмы 19 позволяет упростить обработку результатов и определять базу интерферометра с высокой точностью.
Формула изобретения
Интерферометр для измерения углов, содержащий основание, установленные на основании измеритель перемещений, оптически связанный с ним светоделитель, и компенсирующее устройство, каретку, установленную с возможностью перемещения вдоль оси, параллельной оптической оси измерителя перемещений, компенсирующее устройство, выполненное в виде установленных на каретке полупрозрачного зеркала и двух фотоприемников, расположенных в двух взаимно-перпендикулярных плоскостях, и блока управления, входы которого подключены к выходам фотоприемников, привода каретки, вход которого подключен к выходу блока управления, платформу, установленную с возможностью поворота, два шкива, один из которых установлен на осно- вании так, что его ось симметрии совпадает с осью поворота платформы, второй - установлен на платформе с возможностью поворота вокруг оси, параллельной оси поворота платформы и связан с первым гибкой коль-
Фиг.ё
Редактор М. Бланар
Техред М.Моргентал
Заказ 3082ТиражПодписное
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб.. 4/5
лентой, две триппель-призмы, одна из которых оптически связана с полупрозрачным зеркалом и установлена на одном из шкивов так, что ее вершина совмещена с осью поворота шкива, отличающийся тем, что, с целью повышения точности измерений, он снабжен вторым измерителем перемещений, установленным параллельно первому, третьей и четвертой триппель- призмами, и вторым светоделителем, причем вторая триппель-призма установлена между первым измерителем перемещений и компенсирующим устройством и оптически связана с полупрозрачным зеркалом, второй светоделитель и третья триппель-призма установлены между компенсирующим устройством и вторым измерителем перемещений и оптически связаны с последним и четвертой триппель-призмой, установленной на каретке.
/б
/з
Корректор М. Ткач
| Jelnwertech + Wesecterhme, 1977, т | |||
| Устройство для выпрямления опрокинувшихся на бок и затонувших у берега судов | 1922 |
|
SU85A1 |
| Интерферометр для измерения углов | 1986 |
|
SU1401271A1 |
