ел
С
| название | год | авторы | номер документа |
|---|---|---|---|
| Концентратор переменного давления | 1982 |
|
SU1065706A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ГРАВИТАЦИОННОГО И ВОЛНОВОГО ПОЛЕЙ | 2003 |
|
RU2260199C2 |
| Метрологический стенд по поверке, калибровке уровнемеров и сигнализаторов уровня | 2018 |
|
RU2690701C2 |
| Устройство для поверки весов | 1984 |
|
SU1247668A1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ УСТРОЙСТВА ДЛЯ ИЗМЕРЕНИЯ ГРАВИТАЦИОННОЙ ПОСТОЯННОЙ | 2005 |
|
RU2282219C1 |
| Устройство градуировки и поверки высокочувствительных акселерометров | 1991 |
|
SU1811613A3 |
| САТЕЛЛИТ КОСМИЧЕСКОЙ СТАНЦИИ ДЛЯ ОПРЕДЕЛЕНИЯ ГРАВИТАЦИОННОЙ ПОСТОЯННОЙ В УСЛОВИЯХ КОСМИЧЕСКОГО ПОЛЕТА | 2005 |
|
RU2317573C2 |
| Устройство для градуировки спектрофотометров по длинам волн | 1988 |
|
SU1608502A1 |
| СПОСОБ ДИСТАНЦИОННОЙ КАЛИБРОВКИ АКСЕЛЕРОМЕТРА В СОСТАВЕ ИЗМЕРИТЕЛЬНОГО ПРЕОБРАЗОВАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2272299C1 |
| Устройство для поверки и градуировки рычажных измерителей | 1990 |
|
SU1747857A1 |
Использование: для поверки и градуировки гравиинерциальных приборов. Сущность: способ основан на воздействии на поверяемый прибор переменным гравитационным полем, воздействие осуществляется однородным гравитационным полем. Устройство содержит источник переменного гравитационного поля с приводом, выполненный в виде тела с замкнутой полостью, в которую помещается поверяемый гравиинерциальный прибор, причем поверхности тела и полости являются подобными поверхностями второго порядка, их геометрические центры рассовмещены 1 ил.
Изобретение относится к приборостроению и можетбыть использовано для поверки и градуировки гравиинерциальных приборов
Известен способ поверки гравиинерциальных приборов, заключающийся в задании установленной на неподвижном основании платформе с размещенным на ней поверяемым гравиинерциальным прибором колебательного движения с заданной частотой в горизонтальной плоскости, измерении амплитуд колебания выходного сигнала гравиинерциального прибора и определении расчетным путем амплитудно- частотной и фазочастотной характеристик гравиинерциального прибора.
Недостатком известного способа является низкая точность поверки, вызванная тем, что при отклонении колеблющейся
платформы от горизонтальной плоскости увеличивается погрешность измерения, вызванная возникновением составляющей ус- корения свободного падения. Чтобы исключить эту погрешность, необходимо поддерживать прямолинейность колебательного движения с погрешностью на 2-3 порядка меньшей, чем это позволяет современная эталонная база.
Известно устройство для поверки гравиинерциальных приборов, реализующее известный способ. Это устройство содержит установленную на неподвижном основании платформу, с размещенным на ней гравиинерциальным прибором (сейсмопре- образователем). Платформа связана с приводом, придающим ей колебательное движение в горизонтальной плоскости с заданной частотой. Амплитуда сейсмоколеба-ч ел
Os 00
Ib
Јь
ний платформы определяется измерительным преобразователем перемещения. Амп- литудно-частотная и фазочастотная характеристики гравиинерциэльного прибора определяются расчетным путем.
Недостатком известного устройства является низкая точность поверки, вызванная отклонением колеблющейся платформы от горизонтальной плоскости.
Известен способ поверки и градуировки гравиинерциальных приборов, который основан на использовании гравитационного притяжения и заключается в том, что к чувствительному элементу гравиинерциального прибора прикладывают силу, возникающую при гравитационном притяжении этого элемента и некоторой перемещаемой массь - источника гравитационного поля. В основе способа лежит фундаментальный принцип эквивалентности инерционной и гравитационной масс, позволяющий вместо задания корпусу гравиинерциального прибора ускорения а прикладывать к его чувствительному элементу силу
F ma,(1)
где m - масса чувствительного элемента.
Требуемое для воспроизведения ускорения а значение силы определяется по формуле
F (t) // (Ф (t) S) dvidv2 ma ,
(2)
%
где t(t) - функция, описывающая гравитационное притяжение бесконечно малых объемов dv 1 и dva чувствительного элемента гравиинерциального прибора и источника поля:
S- орт направления измерительной оси гравиинерциального прибора.
Если, например, рассматривать массу чувствительного элемента гравиинерциального прибора как точечную, а источник поля в виде шара, то (2) преобразуется к известной формуле гравитационного при яжения .(3)
F G
R
ma,
используя которую можно определить, например, массу источника поля М, необходимую для воспроизведения ускорения а
М- Д,(4)
где G - гравитационная постоянная; „
R - расстояние между центром источни- ка поля (шара) и точечном чувствительным элементом гравиинерциального прибора.
Недостатком этого способа является низкая то чность поверки и значительная трудоёмкость ее проведения, вызванные необходимостью точного определения размеров всех деталей, входящих в чувствительный элемент, их взаимного расположения и плотности, а также аналогичных данных по источнику гравитационного поля.
5Известно устройство для поверки гравиинерциальных приборов, содержащее неподвижное основание для крепления поверяемого гравиинерциального прибора (акселерометра), источник гравитационного
0 поля, выполненный с возможностью перемещения в вертикальном направлении, для чего он соединен с приводом посредством механической связи.
Недостаток известного устройства за5 ключается в невысокой точности поверки гравиинерциальных приборов и значительной трудоемкости этого процесса. Это объясняется тем, что действующая на чувствительный элемент гравиинерциального прибора сила определяется на основа0 нии выражения (2) расчетным путем, для чего для каждого из поверяемых гракиинер- циальных приборов нужно точно знать размеры и плотность всех деталей, входящих в чувствительный элемент, их взаимное рас5 положение и крепление в его составе. Те же характеристики должны быть известны и для источника поля. Для определения амплитудно-частотных и фазочастотных характеристик гравиинерциального прибора
0 необходимо, чтобы сила F изменялась по гармоническому закону. Поэтому необходимо, кроме того, рассчитать и реализовать такой закон движения источника, который бы для каждого типа гравиинерциального
5 прибора, учитывая отмеченные характеристики его чувствительного элемента, обеспечивал бы выполнение этого условия. Подобные расчеты должны выполняться для требуемых сочетаний амплитуд и частот за0 даваемой силы независимо для каждого гравиинерциального прибора, что определяет их значительную трудоемкость. В свою очередь, привод должен быть выполнен таким образом чтобы для любого гравиинерци5 ального прибора мог обеспечить с достаточ- ной точностью необходимый набор требуемых законов движения. Недостатки прототипа вызваны тем, что создаваемое гравиинерциальным прибором и источни0 ком гравитационное поле является неоднородным.
Цель изобретения - повышение точности поверки гравиинерциальных приборов в области малых значений задаваемых пара5 метров и снижения трудоемкости поверки. Эта цель достигается тем, что согласно способу поверки гравиинерциальных приборов, заключающемуся в воздействии на
поверяемый гравиинерциальный прибор
гравитационным полем, перемещении источника этого поля относительно гравии- нерциального прибора и регистрации выходного сигнала грэвиинерциального прибора, воздействие на гравиинерциаль- ный прибор осуществляют однородным гравитационным полем.
Кроме того, эта цель достигается за счет того, что в устройстве для поверки гравии- нерциальных приборов, содержащем неподвижное основание для установки поверяемого прибора, источник гравитационного поля с приводом и измерительное устройство, источник гравитационного поля выполнен в виде тела с замкнутой полостью, в которой размещено упомянутое ос- нование с закрепленным на нем поверяемым прибором, центр полости сдвинут относительно центра тела, а поверхности тела и полости являются подобными поверхностями второго порядка. При этом ось привода совмещена с осью стержня для крепления гравиинерциальиого прибора к неподвижному основанию.
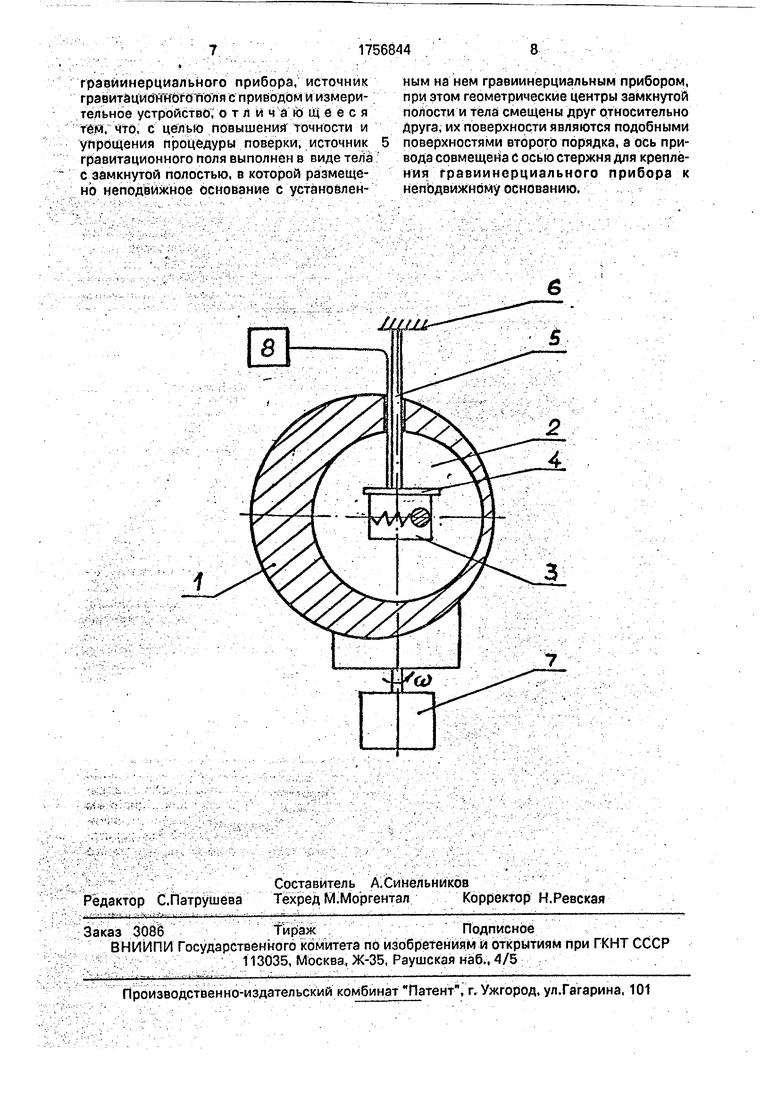
На чертеже изображена принципиальная схема устройства.
Устройство для поверки гравиинерци- альных приборов содержит источник гравитационного поля, выполненный в виде шара 1 однородной плотности р, в котором вы- полхнена полость 2, центр которой смещен относительно центра шара 1. В полости шара 1 размещен поверяемый прибор 3, закрепленный на основании 4 посредством стержня 5, прикрепленного к неподвижной опоре 6. Шар 1 соединен с приводом 7 тик, что ось поворота привода совмещена с осью стержня 5, Выход поверяемого гравиинерциального прибора 3 подключен к измерительному устройству 8.
Способ реализуется посредством этого устройства следующим образом.
Известно, что гравитационное пбле в полости шара однородно и определяется выражением
1 GpR,(5)
где R - радиус-вектор, проведенный из центра шара 1 к центру полости 2;
G - гравитационная постоянная.
Шар 1 приводят во вращение с постоянной угловой скоростью со. При этом проекция ускорения гравитационного поля шара 1 на измерительную ось поверяемого гравиинерциального прибора 3 изменяется по гармоническому закону
дпов.пр. 4pGyORco$(un-f#), (6) Где (й-частота вращения шара;
начальная фаза, определяемая положением поверяемого прибора.
Выходной сигнал поверяемого гравиинерциального прибора 3, после воздейст вия на него полученным однородным гравитационным полем поступает на измерительное устройство 8.
Задавая требуемые частоты по
У
известному из выражения (6) воспроизводимому ускорению и измеряя выходи о и си гнал гравиинерциального прибора, определяют амплитудно-частотную характеристику прибора, т.е. проводят его поверку или градуировку. Фиксируя начальное положение измерительной оси прибора аналогичным путем, может быть найдена и фазочастотная характеристика прибора.
Использование предлагаемого технического решения для поверки гравиинерци- альных приборов в области малых значений параметров движения позволяет существенно повысить точность поверки гравии- нерциальных приборов и тем самым
повысить точность указанных приборов.
Одновременно применение предлагаемого устройства значительно снижает трудоемкость поверки, поскольку отпадает необходимость расчета неоднородных гравитационных полей, характеристики которых для каждого типа гравиинерциального прибора и источника поля зависят от точности знания размеров и плотности всех деталей, входящих в чувствительный элемент
гравиинерциального гприбора и их взаимного расположения и крепления в его составе. Использование в качестве поверхностей полости подобных поверхностей второго порядка с оптимальными
характеристиками позволяет получить чения ускорения большие, чем достигаются для приведенного примера сферических поверхностей.
Формула изобретении я
воздействие на гравиинерциальный прибор осуществляют однородным гравитационным полем.,
гравиинерциального прибора, источник гравитационного поля с приводом и измерительное устройство, отличающееся тем, что, с целью повышения точности и упрощения процедуры поверки, источник гравитационного поля выполнен в виде тела с замкнутой полостью, в которой размещено неподвижное основание с установленным на нем гравиинерциальным прибором, при этом геометрические центры замкнутой полости и тела смещены друг относительно друга, их поверхности являются подобными поверхностями второго порядка, а ось привода совмещена и осью стержня для крепления гравиинерциального прибора к неп одвижному основанию.
| Relnel К | |||
| Accelerometer calibration In the low g range by means of mass attraction | |||
| // AIAA Paper, 1970, Ns 1030. |
