Изобретение относится к устройствам для измерений физических величин и способам их применения в условиях космического полета, вообще, и для измерения гравитационной постоянной G, мировой физической константы, входящей в закон всемирного тяготения И.Ньютона, в частности.
Известны устройства [1-4, 6, 7, 11], которые использовались или их предполагалось использовать для проведения гравитационных измерений.
Недостатком всех этих устройств является размещение пробных тел на весах Кавендиша в неоднородном гравитационном поле тяготеющих тел, причем малейшее смещение пробного тела приводит к изменению тяготеющей силы по довольно сложному закону. Этот недостаток частично преодолевается в устройстве, избранном нами в качестве прототипа [2].
Прототипом предлагаемого изобретения является устройство [2], в котором в качестве источника гравитационного поля используется массивная сфера со сферической полостью внутри, причем центры массивной сферы и полости смещены друг относительно друга, благодаря чему пробные тела маятника Кавендиша находятся в однородном или очень близком к однородному гравитационном поле, что позволяет повысить точность измерений.
Недостатком прототипа является необходимость измерять коэффициенты упругости нитей, на которых подвешиваются весы Кавендиша, что вносит дополнительную погрешность в измеряемую величину.
Задачей предлагаемого изобретения является создание конструкции прибора и разработка способа его использования, при помощи которых будет возможным экспериментально определять гравитационную постоянную с большей степенью точности по сравнению с существующими.
Поставленная задача решается с помощью признаков, указанных в 1-м пункте формулы изобретения, таких как гравитационный сателлит космической станции содержит корпус с закрепленными в нем сфероидальными тяготеющими телами, имеющими сферические полости, эксцентричные сферической поверхности тяготеющих тел, при этом в отверстия тяготеющих тел, соединяющие полость с внешним пространством, установлен индикатор гравитационного поля, выполненный в виде коромысла с размещенными на его концах пробными телами, расположенными в сферических полостях тяготеющих тел, причем в середине коромысла установлен левитационный подшипник, кольца которого прикреплены к корпусу сателлита.
В пункте 2 формулы раскрыта конструкция подшипника, а именно левитационный подшипник содержит ось, установленную перпендикулярно коромыслу, и намагниченные шары, выполненные из высококоэрцитивного материала, - взвешенные части подшипника, вокруг которых симметрично по отношению к центру оси прикреплены к корпусу сателлита кольца из сверхпроводящего материала.
В пункте 3 формулы отражены материалы, из которых выполнены тяготеющие и пробные тела, а именно сфероидальные тяготеющие тела выполнены из магнитомягкого материала, а пробные тела - из сплава, диамагнитная восприимчивость которого компенсирована парамагнитной восприимчивостью примесей.
Особенности выполнения сферической полости тяготеющих тел отражены в пункте 4 формулы, а именно стенки сферических полостей имеют покрытие из материала - сплава пробных тел.
В целях обеспечения работоспособности устройства корпус сателлита связан кабелем-фалом через бесконтактную муфту с космической станцией, при этом он снабжен компенсационным маховиком, расположенным на одной оси с сельсинным устройством, управляемым оптической системой сигнализации об угле разворота индикатора гравитационного поля.
Особенность выполнения коромысла отражена в пункте 7 формулы, а именно коромысло выполнено в виде стержня или имеет S-образную форму.
Подобно прототипу [2] в качестве источника гравитационного поля используется массивная сфера со сферической полостью внутри, геометрические центры которых не совпадают. В сферическую полость помещают пробное тело, располагающееся на коромысле маятника Кавендиша, проходящем через вырез в массивной сфере. Пробное тело располагается внутри полости, имеющей однородное гравитационное поле, метрологические расчеты и калибровка которого может быть выполнена с большей точностью, чем внешнее взаимодействие двух массивных сфер. Рассматриваются два варианта виртуального перемещения пробного тела в таком поле: продольное и поперечное по отношению к направлению напряженности гравитационного поля внутри полости.
При продольном перемещении сила гравитационного притяжения пробного и тяготеющего тел остается постоянной в пределах сферической полости. Конструкция выполнена так, что коромысло с пробными телами в среднем сохраняет свою ориентацию относительно мирового пространства или, как говорят, относительно «неподвижных звезд», а тяготеющие тела вместе с корпусом сателлита поворачиваются благодаря установке двух маховиков противоположного вращения, управляемых автоматикой и системой слежения за ориентацией.
При поперечном перемещении потенциальная энергия вибратора имеет по оси симметрии «потенциальную яму», в которой осуществляются колебания без применения упругих нитей или пружин, т.е. исключается из измерений коэффициент упругости нитей. Для сохранения центрального положения оси поворотов необходимо закрепление их в подшипниках со свободой движения только в одной угловой степени свободы, а применение упругих подвесов исключено. При гравитационных измерениях имеется опыт применения левитационных подшипников или подвесов [11, 12]. В нашем случае для сохранения центрального положения оси поворотов весов Кавендиша и обеспечения только одной угловой степени свободы, а также исключения флуктуационных помех со стороны электрического поля предлагается применить левитационные подшипники следующего типа: взвешиваемое тело представляет собой постоянный магнит в виде сферы из самарий-кобальтового феррита, а упорная система - кольцевая группа из сверхпроводника.
Систематическую ошибку в таких измерениях составит меняющийся во времени градиент силы гравитации от Земли, а, возможно, и Солнца. Поэтому устройство для вибрационного варианта предполагает сохранение систем маховиков противоположного вращения.
Поставленная задача решается с помощью признаков, указанных в пункте 8 формулы изобретения, таких как способ измерения гравитационной постоянной в условиях космического полета, в котором гравитационный сателлит, как описано в пункте 1 формулы изобретения, размещают на свободно летящей платформе-сателлите космической станции, связанном с последней энергетическим кабелем-фалом, так что сателлит и фал располагают в небольшом телесном угле вокруг оси вращения космической станции, при этом расчетный период собственных колебаний выбирают продолжительностью от 10 до 20 периодов оборота космической станции вокруг Земли, а гравитационную составляющую определяют как состоящую из постоянной величины из трех значащих цифр и варьируемой величины для оптимального совпадения с измерениями времени и угловой скорости на различных фазах колебания, причем используют два идентичных сателлита с гравитационными диполями, но ориентированных во взаимно перпендикулярных направлениях в плоскости колебаний, перпендикулярной направлению на предполагаемый источник гравитационных волн, или, например, для регистрации градиентных явлений в поле силы тяготения Солнца и диагностики перемещения масс в фотосфере в периоды между двумя максимумами его активности.
В пунктах 9 и 10 формулы изобретения отражены условия проведения процесса измерений, а именно длину кабеля, соединяющего сателлит со станцией, выбирают такой, чтобы разница скорости сноса космической станции и сателлита в течение периода измерений не привела бы к его натягу. При этом сателлит с системой из двух оппозитных маховиков выпускают с космической станции в свободный полет при нулевом вращении корпуса, а измерение параметров его вращения производят до потери радиосвязи с ним.
Способ использования предлагаемого устройства отличается тем, что устройство располагают на сателлите космической станции, связанном с последней свободным кабелем, причем его длина рассчитывается так, чтобы во время измерений гравитационной постоянной он не приходил в натянутое состояние, вызванное, например, явлениями различия сноса космической станции и сателлита. Сателлит удерживается вблизи оси вращения космической станции, а его корпус сохраняет постоянную ориентацию относительно неподвижных звезд.
Аналогично использованию плотных оболочек в аппарате по измерению гравитации [13] массивные полусферы в нашем устройстве могут быть приведены в оппозитное вращение на общей оси симметрии, обеспечивая необходимую ориентацию сателлита, температурную однородность и защиту от внешних магнитных полей.
Указанные выше отличительные признаки (как для устройства, так и для способа), каждый в отдельности и все совместно, направлены на решение поставленной задачи и являются существенными. Использование предлагаемого сочетания существенных отличительных признаков в известном уровне техники не обнаружено, следовательно, предлагаемое техническое решение соответствует критерию патентоспособности «новизна».
Единая совокупность новых существенных признаков с общими, известными, обеспечивает решение поставленной задачи, является неочевидной для специалистов в данной области техники и свидетельствует о соответствии заявленного технического решения критерию патентоспособности «изобретательский уровень».
Сущность предлагаемого изобретения представлена на нижеследующих фигурах:
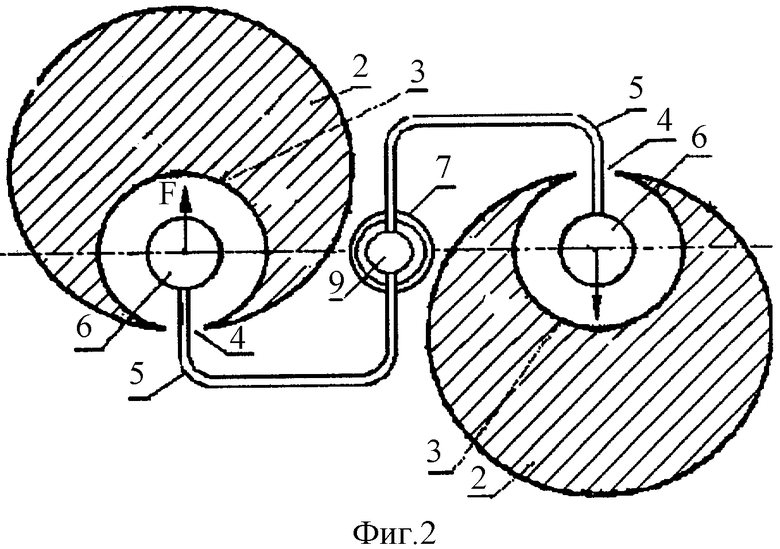
Фиг.1 Элемент однородного поля в приборе для измерения гравитационной постоянной (сферическая полость в сферическом тяготеющем теле).
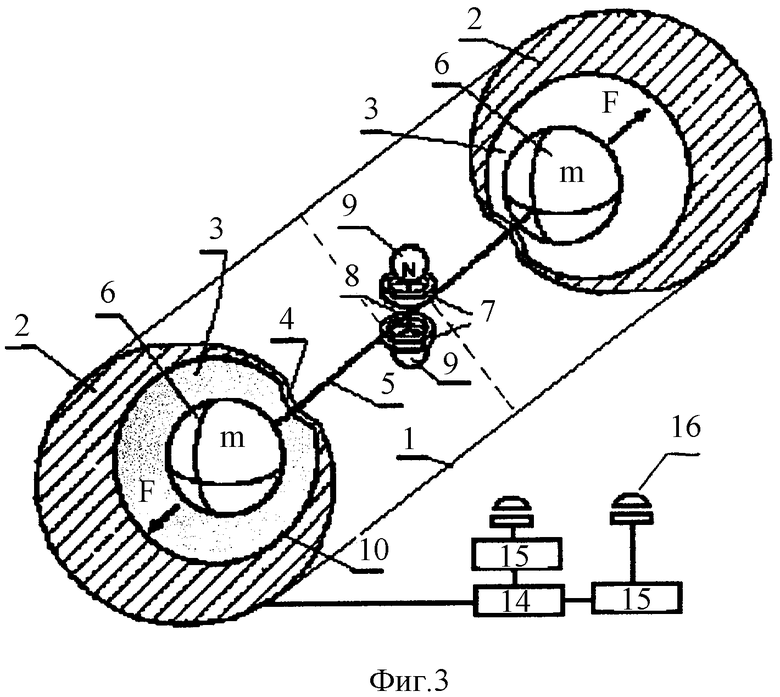
Фиг.2 Ротационный прибор для измерения гравитационной постоянной, размещаемый на гравитационном сателлите космической станции.
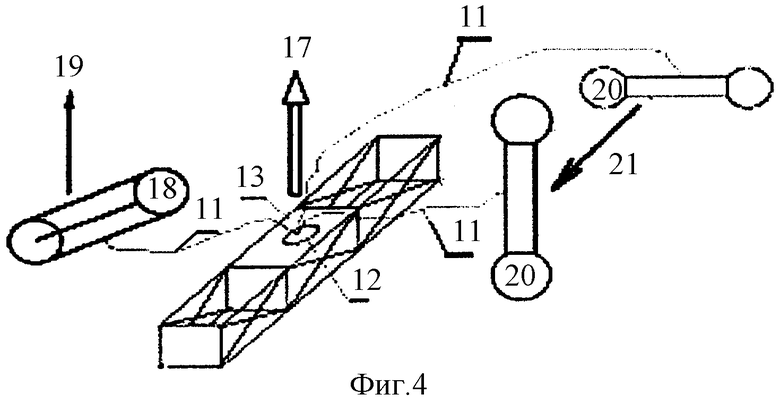
Фиг.3. Вибрационный прибор с использованием элементов однородного поля.
Фиг.4. Ротационный и вибрационный сателлиты в их возможном положении относительно космической станции, имеющей собственное вращение.
Предлагаемое устройство содержит корпус 1 с закрепленными в нем сфероидальными тяготеющими телами 2, имеющими сферические полости 3, эксцентричные сферической поверхности тяготеющих тел 2, при этом в отверстия 4 тяготеющих тел, соединяющие полость с внешним пространством, установлен индикатор гравитационного поля, выполненный в виде коромысла 5 с размещенными на его концах пробными телами 6, расположенными в сферических полостях 3 тяготеющих тел 2, причем в середине коромысла 5 установлен левитационный подшипник, кольца 7 которого прикреплены к корпусу 1 сателлита (фиг.3).
Левитационный подшипник (фиг.3) содержит ось 8, установленную перпендикулярно коромыслу 5, и намагниченные шары 9, выполненые из высококоэрцитивного материала - взвешенные части подшипника, вокруг которых симметрично по отношению к центру оси 8 прикреплены к корпусу сателлита кольца 7 из сверхпроводящего материала.
Сфероидальные тяготеющие тела 2 выполнены из магнитомягкого материала, а пробные тела 6 - из сплава, диамагнитная восприимчивость которого компенсирована парамагнитной восприимчивостью примесей.
Стенки 10 сферических полостей 3 имеют покрытие из материала - сплава пробных тел.
Корпус 1 связан кабелем-фалом 11 через бесконтактную муфту 12 (электромагнитная муфта передачи сигналов с малым моментом кручения) с космической станцией 13 (фиг.3).
Сателлит снабжен (фиг.3) компенсационным маховиком 15, расположенным на одной оси с сельсинным устройством 14, управляемым оптической системой сигнализации 16 об угле разворота индикатора гравитационного поля. Коромысло 5 выполнено в виде стержня (фиг.3) или имеет S-образную форму (фиг.2).
На фиг.4 показано 17 - вектор угловой скорости собственного вращения космической станции, 18 - возможное положение гравитационного сателлита ротационного типа, 19 - вектор угловой скорости вращения корпуса сателлита ротационного типа, 20 - возможное положение гравитационных сателлитов вибрационного типа, 21 - предполагаемое направление распространения гравитационных волн.
Устройство выполнено следующим образом: на платформе находящегося в свободном полете на космической орбите вокруг Земли беспилотного устройства - сателлита космической станции 13, связанного с последней свободным от натяга кабелем 11, размещены изготовленное из однородной магнитомягкой стали тяготеющие тела 2, прикрепленные к корпусу 1 сателлита и содержащие сферическую полость 3, эксцентричную относительно сферической внешней поверхности тяготеющего тела 2 (Фиг.1-3).
В отверстие 4 в тяготеющем теле 2, соединяющем полость 3 с внешним пространством, вводится пробное тело 6, находящееся на коромысле 5, на другом конце которого размещается идентичная пара тел 2-4, причем на пробные тела 4 действуют силы гравитационного тяготения 6, направленные параллельно линии, соединяющей центры тел 1 и полости 2 (Фиг.2, 3).
В середине коромысла 5 размещается левитационный подшипник (Фиг.2, 3), состоящий из оси 8, перпендикулярной к коромыслу 5, и намагниченных шаров 9 - взвешиваемых частей подшипника, вокруг которых симметрично по отношению к центру оси 8 прикреплены к корпусу 1 сателлита кольца 7 из сверхпроводящего материала.
Предложены два варианта устройства: ротационный (Фиг.2) и вибрационный (Фиг.3).
В ротационном варианте (Фиг.2) - гравитационная сила F направлена перпендикулярно к коромыслу 5, а само коромысло 5 имеет в плоскости Фиг.2 изогнутую S-образную форму, причем в положении для измерений центры пробных тел 6 удерживаются в среднем около центра полости 3. Известная оптическая система по отраженному лучу от зеркала на оси 8 будет следить за положением пробного тела 6 внутри полости 3 и при отклонении на заданный угол воздействовать на систему из двух гироскопов противоположного вращения, на фигуре не показанных, с осями, параллельными оси 8.
В вибрационном варианте (Фиг.3) гравитационная сила F направлена в положении покоя вдоль коромысла 5, а само коромысло 5 имеет форму прямого стержня с пробными телами 6 на концах, причем тяготеющие тела 2 вместе с корпусом 1 сателлита остаются в среднем неподвижно ориентированными относительно мирового пространства.
На Фиг.4 изображены ротационный и вибрационный сателлиты в их возможном положении относительно космической станции 10, имеющей собственное вращение с угловой скоростью, изображенной вектором 11, задаваемой, например, постоянной ориентацией на Землю.
Гравитационный сателлит ротационного типа 18 имеет вектор угловой скорости вращения 19, направленный параллельно вектору 17 и равный ему в начале сеанса измерения, т.е. в момент сброса сателлита с космического корабля. В процессе сеанса измерения абсолютное значение вектора 17 будет меняться, т.е. сателлит ротационного типа 18 будет вращаться относительно системы координат космической станции 13.
Гравитационные сателлиты вибрационного типа имеют положение 20, они не должны вращаться относительно мирового пространства. Их положение друг относительно друга будет определяться космогонической задачей, например обнаружением гравитационных волн, предполагаемое направление которых изображено стрелкой 21, или измерениями второй производной поля силы тяжести по пространственным координатам.
Кабели дистанционного управления сателлитом или энергетического питания 13 могут служить одновременно тросом для возврата сателлита на борт космической станции 13 по принципу «не улетай далеко». Кабель 11 предлагается соединить с космической станцией 13 электромагнитной муфтой передачи сигналов с малым моментом кручения 12.
Способ в соответствии с настоящим изобретением дополнительно поясняется с помощью приведенного ниже примера, не имеющего ограниченного характера.
Гравитационный сателлит космической станции действует следующим образом. Основой устройства является известное явление однородности гравитационного поля внутри массивной сферы со сферической полостью, вызванного массой этой сферы. Это поле сравнительно мало по сравнению с гравитационным полем Земли, поэтому эти измерения естественно необходимо проводить в условиях космического полета, гравитация скомпенсирована силами инерции.
Однако размещать гравитационный эксперимент на самой космической станции нецелесообразно, так как технологические ускорения корпуса последней на порядок выше измеряемых сил инерции на единицу массы вещества. Размещать такую установку в парящем контейнере внутри космической станции также нецелесообразно, так как характерное время измерений - десятки часов и места для внутреннего полета недостаточно. Кроме того, создать условия вакуума и низкой температуры жидкого азота значительно проще при свободном полете вне космической станции.
Далее предлагается такой режим функционирования обоих видов сателлита. Внутри сферической полости 3 тяготеющего тела 2, прикрепленного к корпусу 1 сателлита, размещается конец коромысла 5 с пробным телом 6, на последнее действует сила гравитационного тяготения F. Пробные тела 6, размещенные на обоих концах коромысла 5, в двух тяготеющих телах 2 испытывают действие пары сил F, вызывающих поворотное движение коромысла 5. В нашем предложении отсутствует упругий элемент в виде упругой нити или проволоки в середине коромысла, как в большинстве гравитационных приборов, но установлен в середине коромысла 5 левитационный подшипник без трения, состоящий из оси 8, перпендикулярной к коромыслу 5, на концах которой укреплены намагниченные шары 9 - взвешенная часть левитационного подшипника. В магнитном поле последних размещены соосные кольца 7 из сверхпроводящего материала, укрепленные на корпусе 1 сателлита и позволяющие коромыслу 5 без трения двигаться только с одной степенью свободы - вращение вокруг оси. Возможные движения с другими степенями свободы вызовут затухающие во времени токи в параллельных проводниках - короткозамкнутых катушках из меди, не показанных на фигурах.
В варианте гравитационного сателлита ротационного типа (Фиг.4) силы F направлены к коромыслу 5 почти под прямым углом и вызывают непрерывное вращательное движение последнего. Непрерывность вращения обеспечивается оптической следящей системой 16 (фиг.3), управляющей разворотом корпуса сателлита (угловая скорость) при помощи пары оппозитных маховиков 15. При этом пробное тело 6 остается в пределах заданного угла отклонения от центрального положения в полости 3. Угол поворота сателлита ротационного типа, как функция отсчета времени, служит для математической обработки и определения силы F в однородном поле полости 3.
В варианте гравитационного сателлита вибрационного типа (Фиг.4) в положении равновесия силы гравитационного взаимодействия направлены вдоль коромысла 5, имеющего в данном варианте форму прямого стержня, но при отклонении коромысла возникнет упругая сила, являющаяся проекцией силы F на направление смещения пробного тела 6, то есть реализуется принцип физического маятника в гравитационном поле очень малой величины. Измерения с сателлитом вибрационного типа проводятся для какого-либо вращения относительно мирового пространства, для чего перед выпуском в свободный полет с космической станции ему придают вращение, противоположное вектору 19 угловой скорости вращения космической станции. Коромысло 5 вместе с пробными телами 6 получают импульс колебательной энергии в пределах малого угла отклонения. При измерениях фиксируется время прохождения через положение равновесия коромысла 5.
Зависимость периода и амплитуды колебаний от времени дает математическую возможность определения гравитационной постоянной или ее отклонения от известного в настоящее время наиболее точного значения, определенного с точностью до 0.0014%:
Go=(6.67390±0.000093)*(10-11)kg-1m3s-2
Преимуществом предлагаемой конструкции является значительно большая энергия собственных колебаний и однородность гравитационного поля взаимодействия в эксцентрической полости 3.
В способе применения предлагаемого устройства предлагается ряд мер по уменьшению факторов, препятствующих увеличению точности измерений.
Необходимо уменьшить влияние магнитного поля. Для этого при измерениях гравитационной постоянной при помощи весов Кавендиша выполняют тяготеющие тела из диамагнитного металлического сплава, добавляя ферромагнетик для сведения магнитной восприимчивости до нуля. В предлагаемом способе тяготеющее тело 2 выполняется из магнитно-мягкого материала, экранирующего полость 3, а пробное тело 6 - из диамагнитного по известному способу.
Необходимо также уменьшить влияние электрического поля, вызванного контактной разностью потенциалов между материалом полостей 3, соответственно тяготеющих тел 2, и пробными телами 6, способ заключается в создании идентичных покрытий поверхности полости 3 и пробного тела 6. Для защиты индикатора гравитационного поля от электрического поля, могущего возникнуть между пробным телом 6 и поверхностью сферической полости 3 в сфероидальном теле 2, которое по оценкам авторитетного источника [14, 15] может достигать 10 вольт, предполагается производить автоматическое уравнивание их электрического потенциала путем соединения через ось в момент достижения крайних точек амплитуды колебаний пробного тела 6.
Предполагается рассмотрение нескольких способов использования устройства:
- Использование устройства на свободно летящей платформе-сателлите космической станции, связанном с последним энергетическим кабелем с передачей электрической мощности около 1 киловатта, так что сателлит и кабель располагаются в небольшом телесном угле вокруг оси вращения космической станции, а его контакт с сателлитом осуществлен в коллекторном виде, позволяет сателлиту иметь независимую ориентацию, например, относительно неподвижных звезд или Солнца - в зависимости от характера научной задачи. Длина кабеля (фала) 11, соединяющего сателлит с устройством, выбирается такой, чтобы разница скоростей сноса космической станции и сателлита в течение периода измерений не привела бы к его натягу.
- Способ использования устройства, характеризующийся тем, что сателлит с системой из двух оппозитных маховиков выпускают с космической станции в свободный полет при нулевом вращении корпуса, а измерение параметров его вращения производят до потери радиосвязи с ним.
- Способ использования устройства, отличающийся тем, что используют два идентичных сателлита с гравитационными диполями вибрационного типа, ориентированных во взаимно перпендикулярных направлениях в плоскости колебаний, перпендикулярной направлению на предполагаемый источник гравитационных волн, или, например, для регистрации градиентных явлений в поле силы тяготения Солнца и диагностики перемещения масс в фотосфере в периоды между двумя максимумами его активности.
Точность, с которой определяется гравитационная постоянная и ее стабильность во времени, определяет фундаментальность наших знаний о Вселенной, солнечной системе и Земле как космическом теле.
Вопрос о стабильности гравитационной постоянной во времени не решен окончательно: например, общая теория относительности А.Эйнштейна принимает G за константу, как физическую аксиому, а теория Дирака считает ее убывающей функцией времени. Анализ экспериментальных данных, полученных за последнее столетие, показывает, что, основываясь на них, нельзя сделать выводы в пользу той или другой теории.
Особое значение для космологии представляет информация о теоретической связи между постоянной Хабла и гравитационной постоянной, выраженной через константы физики - постоянную Планка, скорость света в вакууме, постоянную тонкой структуры и др. Эта величина вычислена с точностью до 9 значащих цифр [1]: G/На0=3.81408782m3kg-1s-1, в то время когда постоянная Хабла, т.е. наши знания о расширении Вселенной из данных астрофизических измерений дают разброс в значениях этой константы между 2,56 и 3,92, т.е. с точностью до 20%. Можно предполагать, что уточнение значений гравитационной постоянной позволит считать постоянную Хабла с точностью до сотых долей процента.
С другой стороны, колебания систематической ошибки в определении гравитационной постоянной при их гармоническом анализе обнаруживают главную гармонику с периодичностью, близкой к периодичности солнечной активности, что позволяет предложить способ определения перемещений солнечных масс внутри фотосферы Солнца, связанный с образованием больших областей пониженного давления в связи с МГД-генерацией магнитных полей.
Измерения гравитационной постоянной можно представить закономерными кривыми, которые, как показано [4, 5], с большой степенью точности имеют периодичность 9,36 года, а диапазон колебаний - 113 (Это - значащие цифры от четвертой до седьмой).
Однако к сложному комплексу возможных влияний на процесс измерения гравитационной постоянной, а, возможно, и на ее истинное значение добавляются измерения, содержащие прямые физические ошибки [6].
Наиболее надежными следует считать измерения гравитационной постоянной, выполненные в нашей стране О.В.Карагиозом и В.П.Измайловым [7], получившими значение: G=(6.6729±0.0005)·10-11 Н·м2·c-2, а также последнее сообщение [8]:
G=(6.6742±0,0010)·10-11 Н·м2·с-2
Существует два направления в стремлении увеличить точность измерений: метрологическое и конструкционное, оба служат одной цели и дополняют друг друга.
Метрологическим можно считать, например, работу авторов первого из указанных значений G, в которой дается ее метод расчета с учетом неоднородности гравитационного поля [9]. Конструкционным можно считать работу авторов последнего из вышеупомянутых значений G, использующих прием компенсации крутильных деформаций упругой проволоки, на которой подвешено коромысло с пробными телами [10]
В ротационном варианте предложения достигается еще большая точность благодаря постоянному относительному положению пробного тела 6 и гравитационного поля в полости 3, а также многократному отсчету разворота корпуса 1 сателлита как функции времени.
Конструкция сателлита, на котором предлагается установить вышеописанный прибор, должна обеспечивать изотермичность температуры пространства расположения прибора при температуре жидкого азота.
Таким образом, предлагаемая конструкция гравитационного сателлита космической станции и способ его использования снимает целый ряд источников систематических ошибок существующих измерений и снижает на два порядка величину случайных ошибок.
Несмотря на то, что были описаны предпочтительные варианты осуществления изобретения, совершенно ясно, что в него специалистами в данной области техники могут быть внесены изменения и дополнения, которые не выходят, однако, за рамки приведенной ниже формулы изобретения.
Ниже даются параметры расчетов предлагаемого устройства.
Вариант гравитационного сателлита вибрационного типа (по Фиг.3)
Источники информации
1. Nobili A.M. "Project "NEWTON" (ESA J. - 1990 - V.14 - P.190; P.389; Phys.Lett. A-1991 - V.160 - P. - 45.
2. Рыбин В.Н, Синельников А.Е. АС SU №1756844А1 Кл5 G01V 7/00, №1756844 A1, 23.08.92. БИ №31 «Способ поверки гравитационных приборов и устройство для его осуществления».
3. Косинов Н.В. «Константные базисы физических и космологических теорий». Физический вакуум и природа. №5, 2002, с.69-103; http://rusnauka.narod/kosinov-n/13/.
4. Карагиоз О.В., Измайлов В.П., Пархомов А.Г. // Исследование флуктуаций измерений гравитационной постоянной на установке с крутильными весами./ ВЕНТ. №21. М. 1992. С.25.
5. Кирко Г.Е. - Результаты поиска причинной зависимости флуктуаций результатов измерений гравитационной постоянной. Ноябрь 2004 г.
6. Дедов В.П., Филимонов Б.П.«Метрологические изъяны в гравитационных опытах с пробными массами». Измерительная техника, стр.3-8.
7. Карагиоз О.В., В.П.Измайлов »Измерение гравитационной постоянной крутильными весами». Измерительная техника, стр.3-9.
8. CODATA "Newtonian constant of gravitation" http://pysics.nist.gov.10.11.2004.
9. Кудрявицкий М.А., Карагиоз О.В., Измайлов В.П. «Расчет гравитационной постоянной по аналитической формуле и дифференциальному уравнению». Измерительная техника, стр.7-9.
10. Jeans H. Gundlach and Stephen M.Merkowitz. "Precise Calibration of the Intrinsic Strength of Gravity and Measuring the Mass of the Earth" APS Virtual Pressroom - April Meeting Lay Language Papers. 24.11.04.
11. А/С SU 1083795, Кл5 G01V 7/02, В.А.Чаркин и Ф.Ф.Менде «ГРАВИМЕТР», 07.07.86, Бюл. №25.
12. WO 2004020942, G01V 7/00 Barrbt Francois. Moser Roland. Sandner Jan "DIAMAGNETIC LEVITATION SYSTEM" 2004-03-11.
13. Pat.US4935883 Hulsing||Rand H (US) "Apparatus und method for leveling a gravity measurement device." G01V 7/00, 1990-06-19.
14. Брагинский В.Б., Манукин А.Б. «Измерение малых сил в физических экспериментах». М.: «НАУКА», 1974, 152 с.
15. US Patent 6231011. May 15,2001.Chu, Wei-Kan (Houston TX) Satellite angular momentum control system using magnet super-conductor flywheels.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ УСТРОЙСТВА ДЛЯ ИЗМЕРЕНИЯ ГРАВИТАЦИОННОЙ ПОСТОЯННОЙ | 2005 |
|
RU2282219C1 |
| СПОСОБ СОЗДАНИЯ ТЯГИ В ВАКУУМЕ И ПОЛЕВОЙ ДВИГАТЕЛЬ ДЛЯ КОСМИЧЕСКОГО КОРАБЛЯ (ВАРИАНТЫ) | 2001 |
|
RU2185526C1 |
| Лазерный космический гравитационный градиентометр | 2021 |
|
RU2754098C1 |
| СПОСОБ ИЗМЕРЕНИЯ ГРАВИТАЦИОННОГО ПОЛЯ ЗЕМЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2023 |
|
RU2825190C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПОСТОЯННОЙ ГРАВИТАЦИИ | 2013 |
|
RU2543707C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГРАВИТАЦИОННОЙ ПОСТОЯННОЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1993 |
|
RU2112998C1 |
| ЭЛЕКТРОПРИВОД НА БАЗЕ ПЛАНЕТАРНОГО ЦИКЛОИДАЛЬНОГО РЕДУКТОРА С УПРУГИМ ЗАЦЕПЛЕНИЕМ - ЭП ПЦР-У | 2007 |
|
RU2358375C2 |
| СПОСОБ АВТОНОМНОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОРБИТЫ КОСМИЧЕСКОГО АППАРАТА | 2017 |
|
RU2696399C2 |
| Гравитационный вариометр | 1977 |
|
SU693325A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАССЫ КОСМИЧЕСКОЙ СТАНЦИИ В ПОЛЕТЕ | 2005 |
|
RU2301181C2 |
Изобретение относится к устройствам для измерений физических величин в условиях космического полета. Сателлит космической станции для определения гравитационной постоянной в условиях космического полета, содержащий корпус с закрепленными в нем сфероидальными тяготеющими телами, имеющими сферические полости, эксцентричные сферической поверхности тяготеющих тел, при этом в отверстия тяготеющих тел, соединяющие их полости с внешним пространством, установлен индикатор гравитационного поля, выполненный в виде коромысла с размещенными на его концах пробными телами, расположенными в сферических полостях тяготеющих тел, причем в середине коромысла, перпендикулярно ему, установлена ось левитационного подшипника с намагниченными шарами, выполненными из высококоэрцитивного материала, являющимися взвешенными частями левитационного подшипника, вокруг которых симметрично по отношению к центру оси прикреплены к корпусу сателлита кольца из сверхпроводящего материала. Технический результат - возможность экспериментально определять гравитационную постоянную с большей степенью точности по сравнению с существующими. 4 ил., 1 табл.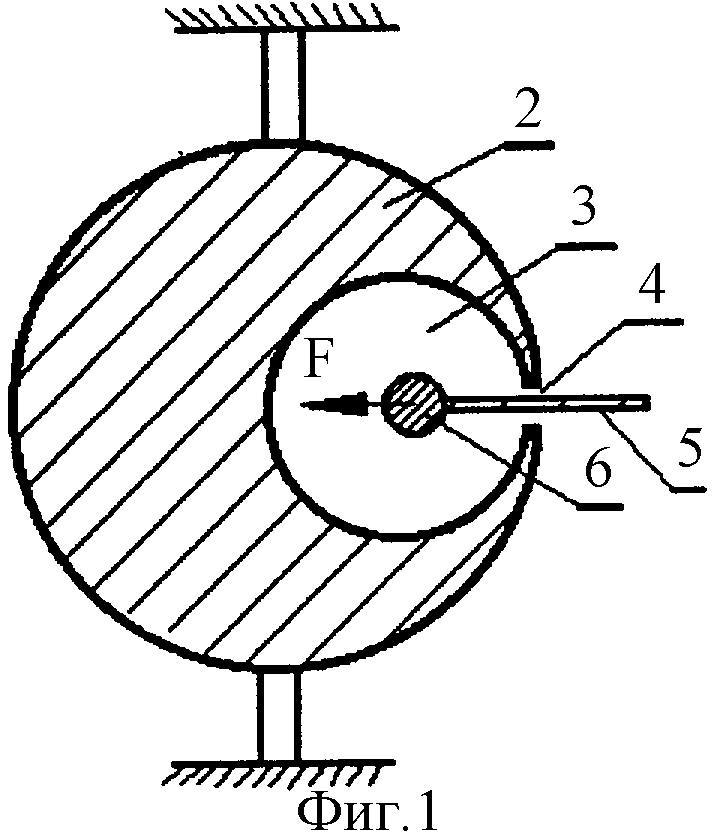
Сателлит космической станции для определения гравитационной постоянной в условиях космического полета, содержащий корпус с закрепленными в нем сфероидальными тяготеющими телами, имеющими сферические полости, эксцентричные сферической поверхности тяготеющих тел, при этом в отверстия тяготеющих тел, соединяющие их полости с внешним пространством, установлен индикатор гравитационного поля, выполненный в виде коромысла с размещенными на его концах пробными телами, расположенными в сферических полостях тяготеющих тел, причем в середине коромысла, перпендикулярно ему, установлена ось левитационного подшипника с намагниченными шарами, выполненными из высококоэрцитивного материала, являющимися взвешенными частями левитационного подшипника, вокруг которых симметрично по отношению к центру оси прикреплены к корпусу сателлита кольца из сверхпроводящего материала.
| Способ поверки гравиинерциальных приборов и устройство для его осуществления | 1990 |
|
SU1756844A1 |
| Гравиметр | 1981 |
|
SU1083795A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГРАВИТАЦИОННОЙ ПОСТОЯННОЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1993 |
|
RU2112998C1 |
| Крутильные весы | 1977 |
|
SU693323A1 |
| Грузовая подвеска крана | 1985 |
|
SU1286497A1 |

