1
Фиг 1
Изобретение относится к измерительной технике и предназначено для измерения угловых перемещений.
Известен дагчикугловых перемещений, содержащий ферромагнитный корпус, внутри которого размещены статор с растровыми окнами, размещенные на нем две последовательно соединенные измерительные обмотки и установленный коаксиально внутри статора ротор с растровыми окнами, размещенными со смещением на 180° один относительно другого, и узел термокомпенсации.
Недостатком известного датчика угловых перемещений является низкая точность, обусловленная сравнительно малой относительной чувствительностью по индуктивности в функции углового перемещения ротора датчика вследствие наличия больших воздушных зазоров в магнитной цепи датчика.
Наиболее близким по технической сущности к предлагаемому является датчик угловых перемещений, содержащий расположенные соосно стаканообраз- ные статор и ротор, выполненные из электропроводного материала и имеющие из своих цилиндрических поверхностях окна, соответствующие секторному углу 180°, кольцеобразный диэлектрический каркас с окном и фасками, установленный на внешней поверхности статора, и размещенную на нем кольцеобразную катушку индуктивности.
Недостатком этого датчика является низкая чувствительность по изменению его индуктивности в функции углового перемещения ротора датчика.
Цель изобретения - повышение относительной чувствительности датчика угловых перемещений за счет уменьшения воздушных зазоров в магнитной цепи датчика при обеспечении технологичности его конструкции.
Поставленная цель достигается тем, что в индуктивном датчике угловых перемещений, содержащем установленные соосно стаканообразные статор и ротор, выполненные из электропроводного материала и име- ющие н а своих цилиндрических поверхностях окна, соответствующие секторному углу 180°, и диэлектрический каркас с размещенной на нем кольцеобразной профилированной катушкой индуктивности, полувитки которой в одной части прилегают к его поверхности, а в другой части прилегают к поверхности статора, причем эти полувитки соединены между собой плавно изгибающимися участками, диэлектрический каркас расположен в зазоре между статором и ротором и выполнен в виде полого цилиндра, а по границам окна в статоре выполнены фаски для размещения плавно изгибающихся участков катушки индуктивности.
Благодаря этому обеспечивается возможность уменьшения радиуса диэлектрического каркаса и полувитков обмотки индуктивности в области окна на статоре,
что обеспечивает повышение относительной чувствительности датчика к угловым смещениям ротора за счет сокращения зазора между полувитками обмотки индуктивности и ротором в области окна на статоре
на величину, равную толщине стенки статора. При этом упрощается конструкция диэлектрического каркаса, так как он выполнен без окна, что повышает технологичность конструкции датчика.
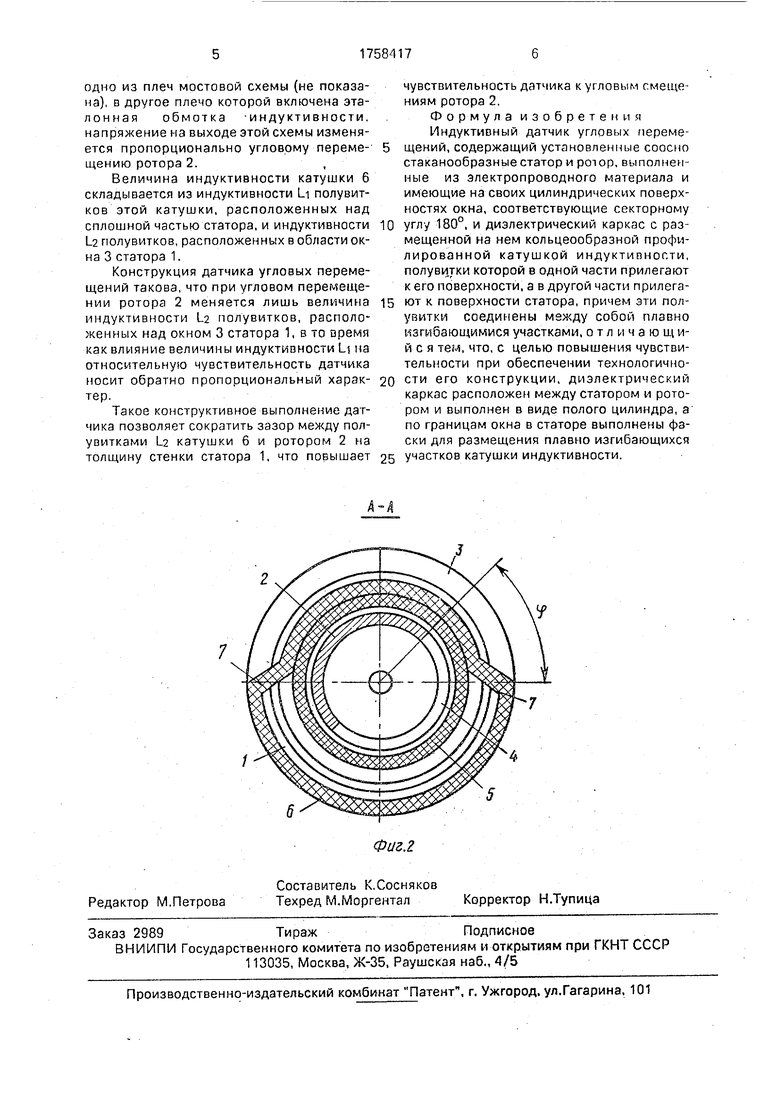
На фиг.1 схематично представлен дат; чик угловых перемещений, продольное сечение; на фиг,2 - сечение А-А на фиг. 1.
Датчик угловых перемещений содержит соосно расположенные стаканообразные
статор 1 и ротор 2, выполненные из металла с высокой электропроводностью.Статор 1 и ротор 2 имеют на своих цилиндрических поверхностях окна 3 и 4, соответствующие секторному углу 180°. Кольцеообразный
диэлектрический каркас 5 размещают между статором 1 и ротором 2. Катушка индуктивности охватывает с внешней стороны статор 1 и каркас 5, причем в области окна 3 на статоре 1 она касается поверхности
каркаса 5, а далее - сплошной части статора 1. По границе окна 3 статора 1 со стороны его внешней поверхности выполнены фаски 7 для плавного изгиба витков катушки. Статор и ротор выполнены из латуни, например
Л63.
Датчик угловых перемещений работает следующим образом.
В исходном положении ротора 2, когда окно 3 статора 1 полностью перекрыто телом ротора 2, угол р поворота ротора 2 относительно окна 3 статора принимается равным нулю. В этом угловом положении экранирующее влияние электропроводных (металлических) участков статора I и ротора 2 максимально, вследствие чего величина индуктивности катушки 6 минимальна. При угловом перемещении ротора 2 внутри катушки 6 появляются области, не перекрытые электропроводными частями статора 1 и ро- тора 2, благодаря чему индуктивность обмотки 5 увеличивается пропорционально углу поворота ротора, достигая при угле р 180° CBoei 1 максимального значения. При включении катушки 6 индуктивности в
одно из плеч мостовой схемы (не показана), в другое плечо которой включена эталонная обмотка -индуктивности, напряжение на выходе этой схемы изменяется пропорционально угловому перемещению ротора 2.
Величина индуктивности катушки 6 складывается из индуктивности U полувитков этой катушки, расположенных над сплошной частью статора, и индуктивности -2 полувитков, расположенных в области окна 3 статора 1.
Конструкция датчика угловых перемещений такова, что при угловом перемещении ротора 2 меняется лишь величина индуктивности 2 полувитков, расположенных над окном 3 статора 1, в то время как влияние величины индуктивности LI па относительную чувствительность датчика носит обратно пропорциональный характер.
Такое конструктивное выполнение датчика позволяет сократить зазор между полувитками L2 катушки 6 и ротором 2 на толщину стенки статора 1, что повышает
чувствительность датчика к угловым смещениям ротора 2.
Формула изобретения Индуктивный датчик угловых перемещений, содержащий установленные соосно стаканообразныестатор и ротор, выполненные из электропроводного материала и имеющие на своих цилиндрических поверхностях окна, соответствующие секторному
углу 180°, и диэлектрический каркас с размещенной на нем кольцеообразной профилированной катушкой индуктивности, полувитки которой в одной части прилегают к его поверхности, а в другой части прилегают к поверхности статора, причем эти полувитки соединены между собой плавно изгибающимися участками, отличающийся тем, что, с целью повышения чувствительности при обеспечении технологичности его конструкции, диэлектрический каркас расположен между статором и ротором и выполнен в виде полого цилиндра, а по границам окна в статоре выполнены фаски для размещения плавно изгибающихся
участков катушки индуктивности.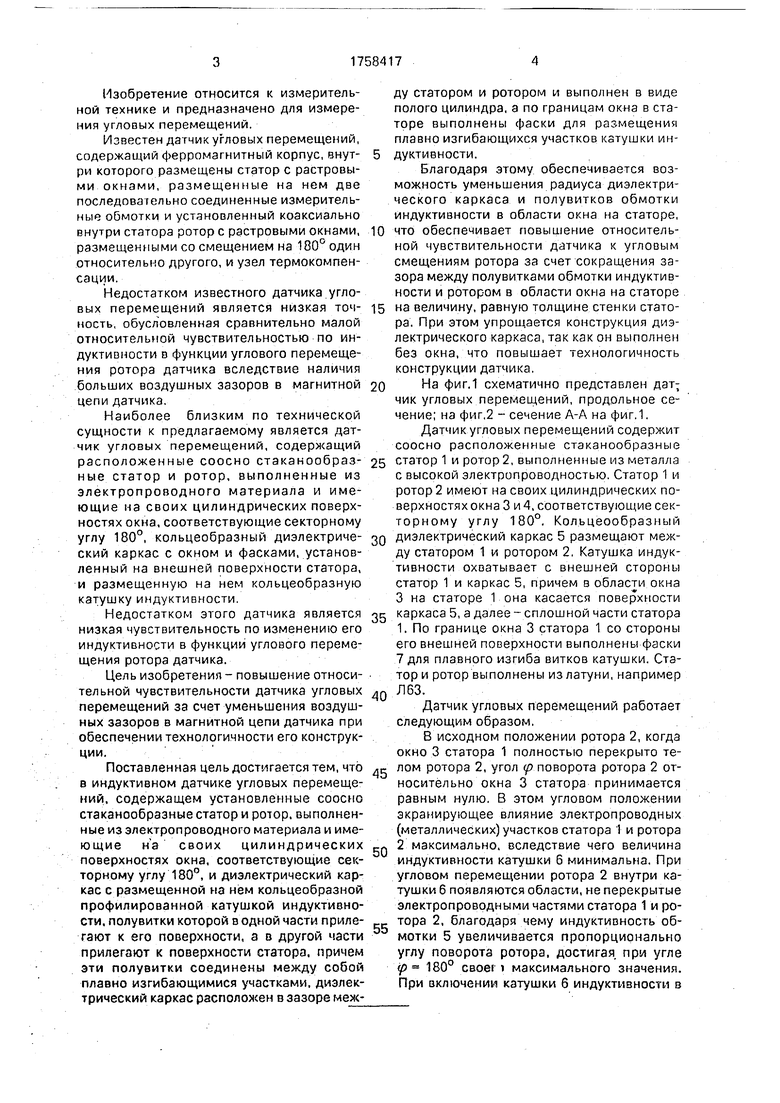
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик угловых перемещений | 1987 |
|
SU1441186A1 |
| Датчик угловых перемещений | 1988 |
|
SU1633265A1 |
| Датчик угловых перемещений | 1989 |
|
SU1652808A1 |
| Индуктивный датчик угловых перемещений | 1990 |
|
SU1768953A1 |
| ДАТЧИК УГЛОВОГО ПОЛОЖЕНИЯ ВАЛА | 2000 |
|
RU2180096C2 |
| Индуктивный датчик угловых перемещений | 1985 |
|
SU1315791A1 |
| Вариометр | 1982 |
|
SU1073809A1 |
| ЕМКОСТНЫЙ ДАТЧИК ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ УГЛОВОГО ДВИЖЕНИЯ ОБЪЕКТОВ | 2010 |
|
RU2445633C1 |
| ТРАНСФОРМАТОРНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 2011 |
|
RU2480710C2 |
| ЕМКОСТНЫЙ ДАТЧИК ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ УГЛОВОГО ДВИЖЕНИЯ ОБЪЕКТОВ | 2010 |
|
RU2442991C1 |
Изобретение относится к измерительной технике. Цель изобретения - повышенно чувствительности датчика угловых перемещений, который содержит стакано- образные статор 1 и ротор 2, выполненные из высокоэлектропроводного материала и имеющие на своих цилиндрических поверхА ностях окна 3 и 4, которые соответствуют секторному углу 180°. Каркас 5, выполненный цилиндрическим и не имеющий окна, размещен между статором 1 и ротором 2, а профилированная кольцеобразная катушка 6 охватывает снаружи статор 1 и каркас 5. При угловом перемещении ротора 2 экранирующее влияние перекрывающихся электропроводящих участков статора 1 и ротора 2 на индуктивность катушки 6 изменяется пропорционально углу поворота ротора 2, вследствие чего пропорционально этому углу изменяется также величина индуктивности катушки. Уменьшение зазоров между ротором 2 и участками витков катушки 6, а также между статором 1 и другими участками витков этой катушки обеспечивает увеличение относительной чувствительности датчика к угловым перемещениям ротора. 2 ил.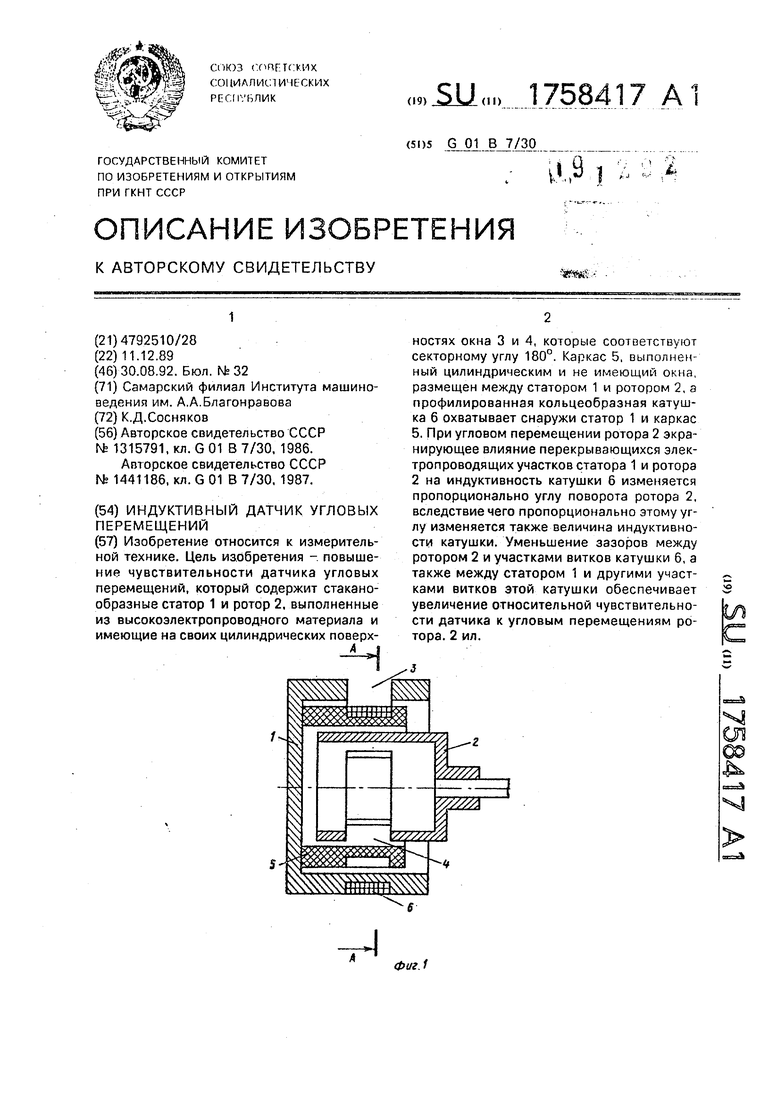
| Индуктивный датчик угловых перемещений | 1985 |
|
SU1315791A1 |
| Датчик угловых перемещений | 1987 |
|
SU1441186A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
