Изобретение относится к измерительной технике, преимущественно к устройствам для испытания узлов и агрегатов транспортных средств.
Известен индуктивный датчик угловых перемещений, содержащий ферромагнитный трубчатый статор с вырезами, размещенный внутри статора и связываемый в процессе измерений с контролируемым объектом ферромагнитный ротор с первой группой расположенных у его конца секторных полюсов, размещенных против вырезов в статоре, и дифференциально включенные измерительные обмотки.
Однако в известном устройстве измерительная система подвержена действию магнитных полей и переменных температур, влияющих на точность измерений.
Наиболее близким из известных по технической сущности является устройство для измерения угловых перемещений, содержащее статор с растровыми окнами, разме00
С
щенные на нем две последовательно соединенные измерительные обмотки и установленный коаксиально внутри статора ротор с растровыми окнами, размещенными со смещением на 180° один относительно другого.
Однако в известном устройстве весь измерительный узел подвержен действию переменных температур, влияющих на изменение индуктивности обмотки, что вызывает погрешности в измерениях.
Целью изобретения является расширение функциональных возможностей за счет определения относительного углового положения второго вращающегося объекта. Указанная цель достигается тем. что индуктивный датчик угловых перемещений, содержащий цилиндрический статор, закрепленный в нем диэлектрический каркас, размещенную на каркасе одну пару катушек индуктивности, плоскости каждой из которых перпендикулярны продольной оси датчика, установленный на этой оси с
1
О 00
ю
СП
со
возможностью вращения цилиндрический ротор с двумя растровыми окнами на его поверхности, расположенными диаметрально противоположно одно другому напротив соответствующей катушки индуктивности, и измерительная схема, к которой подключены эти катушки, он снабжен второй парой идентично выполненный катушек индуктивности, размещенных параллельно катушкам первой пары на том же каркасе, и вторым ротором, установленным коаксиально с первым и предназначенным для связи со вторым объектом контроля, первый ротор выполнен с дополнительной парой растровых окон, расположенных диаметрально противоположно одно другому напротив соответствующих катушек второй пары, а второй ротор состоит из секторов, выполненных из материала с различной магнитной проницаемостью, измерительная схема выполнена мостовой, а катушки индуктивности каждой пары включены в ее противоположные плечи, в полумостовой измерительной схеме катушки индуктивности каждой пары включена в смежные плечи этой схемы.
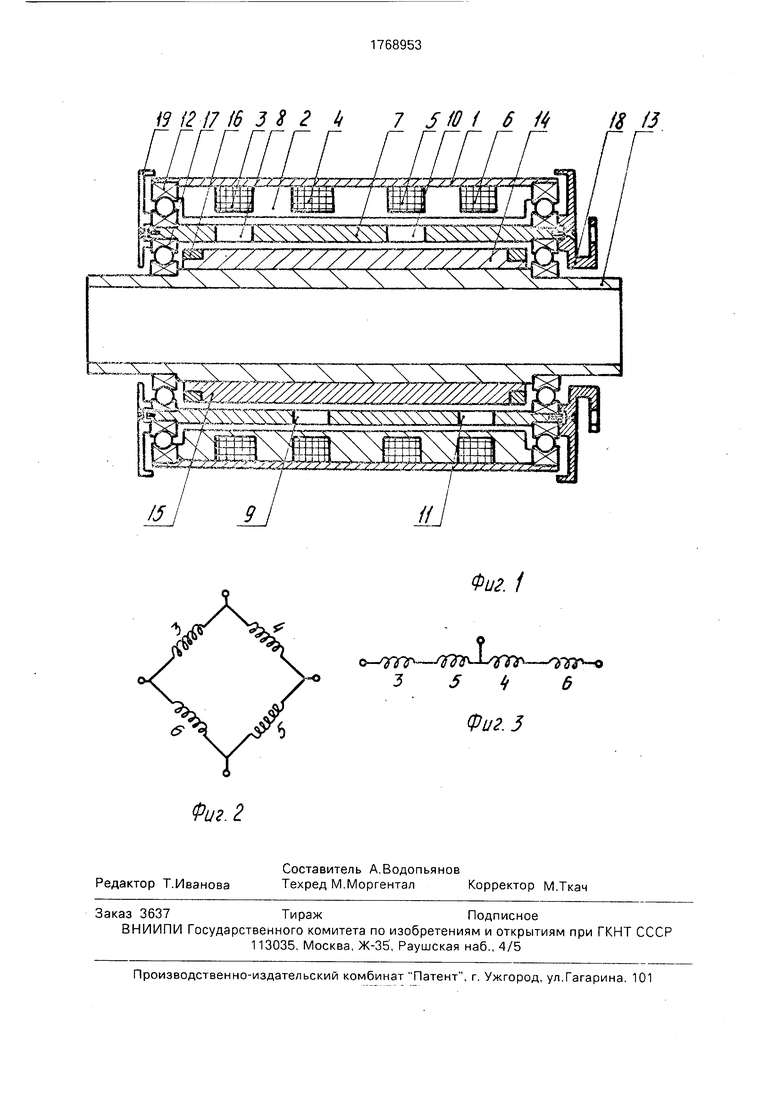
На фиг.1 показан продольный разрез индуктивного датчика угловых перемещений; на фиг.2 - мостовая измерительная схема включения катушек индуктивности датчика; на фиг.З - полумостовая измерительная схема включения катушек индуктивности датчика.
Индуктивный датчик угловых перемещений содержит цилиндрический статор 1, закрепленный в нем диэлектрический каркас 2 с размещенными на нем катушками 3,4,5,6 индуктивности с сопротивлением Х1,Х2,Хз,Х4, включенные в измерительную схему, выполненную в виде моста фиг.2 или полумоста фиг.З, цилиндрический ротор 7 с растровыми окнами 8,9,10,11, установленный в подшипниках 12 внутри статора 1, второй ротор 13 состоящий из секторов 14,15 с различной магнитной проницаемостью с закрепленными на нем фиксаторны- ми кольцами 16, установленный в подшипниках 17 внутри ротора 7, фланцы 18,19.
Работает индуктивный датчик, угловых перемещений следующим образом, При отсутствии относительных угловых перемещений между ротором 7,13 напротив каждого окна 8,9,10,11 устанавливаются одинаковые по величине слои материалов с различной магнитной проницаемостью секторов 14,15, действующих одинаково на обмотки 3,4,5,6
за счет чего мост находится в равнозесии и напряжение на его выходной диагонали равно нулю.
При относительном перемещении ротора 7 и 13, напротив каждого окна 8,9,10,11 происходит смещение слоев материала секторов 14, 15 с различной магнитной проницаемостью в сторону ее увеличения в окнах 8,10 и уменьшения в окнах 9,11 или наоборот, при обратном относительном перемещении, за счет чего мост разбалансируется и на его выходной диагонали появляется напряжение, пропорциональное угловому перемещению роторов.
Формула изобретения
1.Индуктивный датчик угловых перемещений, содержащий цилиндрический статор, закрепленный в нем диэлектрический каркас, размещенную на каркасе одну пару.
катушек индуктивности, плоскости каждой из которых перпендикулярны продольной оси датчика, установленный на этой оси с возможностью вращения цилиндрический ротор с двумя растровыми окнами на его
поверхности, расположенными диаметрально противоположно одно другому напротив соответствующей катушки индуктивности, и измерительную схему, к которой подключены эти катушки, о т л и ч аю щ и и с я тем, что, с целью расширения функциональных возможностей за счет определения относительного углового положения второго вращающегося объекта, он снабжен второй парой идентично выполненных катушек индуктивности, размещенных параллельно катушкам первой пары на том же каркасе, и вторым ротором, установленным коаксиально с первым и предназначенным для связи с вторым обьектом
контроля, первый ротор выполнен с дополнительной парой растровых окон, расположенных диаметрально противоположно одно другому напротив соответствующих катушек второй пары, а второй ротор состоит из секторов, выполненных из материала с различной магнитной проницаемостью.
2.Датчик по п.1,отличающийся тем, что, измерительная схема выполнена
мостовой, а катушки .индуктивности каждой пары включены в ее противоположные плечи.
3.Датчик по п.1, о т л и ч а ю щ и и с я тем, что измерительная схема выполнена
полумостовой и катушки индуктивности каждой пары включены в смежные плечи этой схемы.
/7 12 17 16 3 8 2 It 7 S W б 14
IS /3
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик угловых перемещений | 1990 |
|
SU1809296A1 |
| Индуктивный датчик угловых перемещений | 1989 |
|
SU1758417A1 |
| Индуктивный датчик угловых перемещений | 1987 |
|
SU1432329A2 |
| ТРАНСФОРМАТОРНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 2011 |
|
RU2480710C2 |
| ДАТЧИК УГЛОВОГО ПОЛОЖЕНИЯ ВАЛА | 2000 |
|
RU2180096C2 |
| ЕМКОСТНЫЙ ДАТЧИК ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ УГЛОВОГО ДВИЖЕНИЯ ОБЪЕКТОВ | 2010 |
|
RU2445633C1 |
| ЕМКОСТНЫЙ ДАТЧИК ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ УГЛОВОГО ДВИЖЕНИЯ ОБЪЕКТОВ | 2010 |
|
RU2442991C1 |
| Датчик угловых перемещений | 1987 |
|
SU1441186A1 |
| Индуктивный датчик микроперемещений ротора активного магнитного подвеса | 2024 |
|
RU2834196C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ УГЛОВОГО ДВИЖЕНИЯ ОБЪЕКТОВ | 2011 |
|
RU2465605C1 |
Изобретение относится к измерительной технике и имеет целью расширение функциональных возможностей индуктивного датчика угловых перемещений за счет определения относительного углового положения второго вращающегося объекта. Датчик содержит закрепленные на статоре четыре катушки индуктивности, включенные в плечи мостовой измерительной схемы, и два установленных коаксиально ротора, каждый из которых кинематически связан с соответствующим вращающимся объектом контроля. Один из роторов имеет четыре растровых окна, расположенных напротив соответствующей катушки индуктивности, а доугой состоит из секторных участков, выполненных из материалов с различной магнитной проницаемостью. 2 з.п. ф-лы, 3 ил.
ZESSSSSSSEI
S//S/7 S 7 -(ГУ,
6
Фиг. 1
о-77Т --QflR nfa- ТО -о 3 5 6
Фиг.З
| Индуктивный датчик угловых перемещений | 1983 |
|
SU1224567A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Индуктивный датчик угловых перемещений | 1985 |
|
SU1315791A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Приспособление для установки двигателя в топках с получающими возвратно-поступательное перемещение колосниками | 1917 |
|
SU1985A1 |
