Изобретение относится к противоава- рийной автоматике, а именно к способам восстановления частоты после ее аварийного понижения.
Нарушение баланса генерируемой и потребляемой мощностей в энергосистеме приводит к аварийному снижению частоты. Для восстановления частоты в энергосистеме применяется ряд мер
Известен способ восстановления частоты в.энергосистеме при аварийном понижении частоты путем измерения частоты, сравнения ее с уставкой запуска и запуска резервных генераторов в момент снижения частоты ниже уставки запуска При этом очередность запуска резервных генераторов
осуществляется по-разному, в определенной очередности с разными выдержками времени и т.д.
Недостатком такого способа восстановления частоты в энергосистеме является за- тянутость процесса ликвидации дефицита генерируемой мощности.
Известен также способ восстановления частоты в энергосистеме путем отключения части нагрузки устройствами автоматической частотной разгрузки (АЧР)
Известен способ АЧР, по которому дополнительно измеряют скорость изменения частоты, отключают очередями часть нагрузки в случае, когда частота ниже уставки запуска АЧР и скорость изменения частоты
Я
СО
ч о о
меньше разности номинального и текущего значений частот, умноженной на коэффициент пропорциональности, определяемый максимальной постоянной времени энергосистемы.
При этом процесс восстановления идет быстрее, но оба вида автоматики (резерв генераторов и АЧР) действуют независимо на восстановление частоты в энергосистеме без согласования, в результате чего нельзя минимизировать ущерб от аварии.
Наиболее близким к предлагаемому по технической сущности является способ, по которому измеряют частоту, сравнивают с уставкой запуска и запускают все резервные генераторы с возбуждением одновременно в момент снижения частоты ниже уставки, измеряют скорость изменения частоты и управляют набором мощности, оценивая частоту и скорость ее изменения. При этом в зависимости от результата сравнения скорости изменения частоты с разницей между номинальной частотой и текущим значением частоты, умноженной на коэффициент пропорциональности, определяемый максимально допустимой скоростью изменения частоты и постоянной времени энергосистемы, подается сигнал на увеличение или уменьшение генерируемой мощности.
Однако в этом в случае также отсутствует координация автоматики пуска турбин и устройств АЧР и минимизация ущерба.
Цель изобретения - уменьшение ущерба от частотной аварии, ускорение процесса восстановления частоты и ликвидации дефицита мощности в энергосистеме.
Поставленная цель достигается тем, что при аварийном снижении частоты в регуляторах турбин резервных генераторов, как и в устройствах АЧР, сравнивают значение скорости изменения частоты в энергосистеме с величинами, каждая из которых сформирована как разность номинального и текущего значения частот, умноженная на соответствующие коэффициенты пропорциональности, определяемые максимальной постоянной времени энергосистемы, максимальной допустимой скоростью изменения частоты и допустимой погрешностью регуляторов турбин, причем коэффициент пропорциональности устройств АЧР минимальный, величина с максимальным коэффициентом пропорциональности одинакова для всех резервных генераторов, а величина со средним коэффициентом пропорциональности для каждого генератора своя, если скорость изменения частоты в каждом генераторе меньше величины со средним коэффициентом пропорциональности, то подают сигнал на увеличение генерируемой мощности, если скорость больдие величины со средним коэффициентом и меньше величины с большим коэффициентом, то снимают подачу сигнала на увеличение генерируемой мощности, если скорость изменения частоты больше величины с большим коэффициентом пропорциональности, то подают сигнал на уменьшение генерируемой мощности.
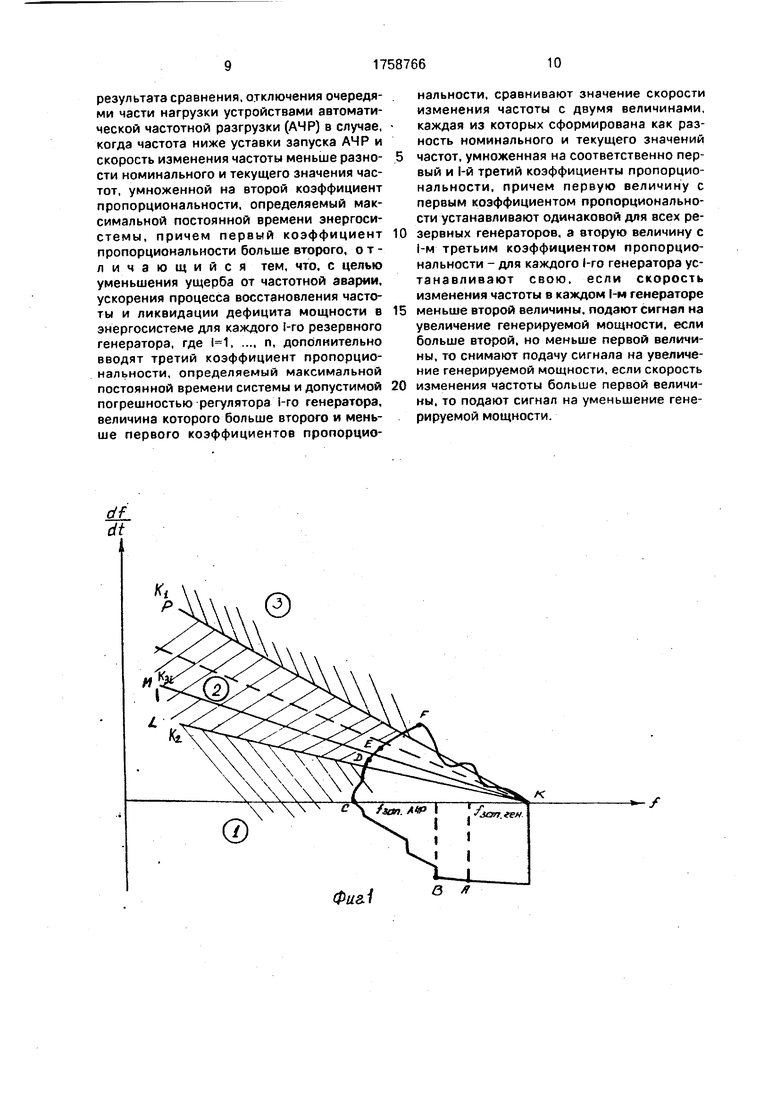
На фиг. 1 представлен пример восстановления частоты в энергосистеме с помощью резервных генераторов и устройств АЧР, Процесс восстановления частоты изображен на фазовой плоскости. Состоянию
энергосистемы в любой момент времени соответствует точка на фазовой плоскости с координатами (f, df /dt). Точка К соответствует нормальному режиму работы энергосистемы с координатами ( df/dt 0), где TH
- номинальная частота.
Условием запуска резервных генераторов и отключения части нагрузки устройствами АЧР является снижение частоты ниже уставок запуска faan.ren и Тзэп АЧР и выполнение условия df/dt-Kn(fH-f) 0, где Кп - коэффициент пропорциональности. Уравнение df/dt Kn(fH-f) является уравнением динамической характеристики регулирования АЧР и резервных генераторов. В рассматриваемом примере динамические характеристики представлены в виде прямых, исходящих из точки К.
В общем случае коэффициент Кп может быть зависим от частоты, тогда динамические характеристики могут иметь нелинейный характер.
Кривая KL является динамической характеристикой регулирования АЧР, она лежит ниже динамических характеристик
резервных генераторов КМ КР. Такое
расположение характеристик обеспечивается соответствующим выбором коэффициентов пропорциональности Кп. Выбор коэффициентов пропорциональности Кп зависит от многих параметров. Так, для того, чтобы динамическая характеристика регулирования АЧР (KL) лежала ниже динамических характеристик резервных генераторов, т.е. чтобы устройства АЧР прекращали срабатывэние раньше резервных генераторов, коэффициент пропорциональности для АЧР (назовем его Ка) должен быть меньше ос- тзльных коэффициентов. Поэтому коэффициент Ка должен соответствовать
наибольшей возможной постоянной времени системы, так как / Теист. Следовательно, «2 1 /Гсист. макс.
При возникновении в энергетической системе дефицита мощности, например при
отключении генераторов или линий электропередачи, происходит снижение частоты в энергосистеме. Когда частота становится меньше частоты запуска генераторов тзап.ген, производят включение резервных генераторов, при этом состояние энергосистемы соответствует точке А на фазовой плоскости с частотой тзап.ген и отрицательным значением скорости изменения частоты. Далее поведение регуляторов мощности резервных генераторов зависит от состояния энергосистемы и выбранной динамической характеристики регулирования.
При достижении частотой значения тзап.АЧР начинает работать АЧР и происходит отключение части нагрузки (точка В), при этом скорост ь изменения частоты меняется скачком. Процесс изменения частоты в энергосистеме на фазовой плоскости отображен фазовой траекторией, причем если набор мощности генераторами приводит к плавному изменению траектории, то отключение очередной нагрузки устройствами АЧР приводит к скачкообразному изменению траектории. В момент, которому соответствует точка С плоскости, скорость изменения частоты становится равной нулю.
Управление энергосистемой по траектории КР, проходящей через точку К (df/dt 0, ), осуществляется генератором, имеющим наибольший приоритет управления.
В зоне 1 (ниже кривой KL) работают как устройства АЧР, так и регуляторы всех генераторов, которые подают сигнал на увеличение мощности генераторов. Когда точка состояния лежит выше динамической харзк- тертистики АЧР (точка D), то отключение потребителей прекращается, но продолжается увеличение мощности генераторов.
В зоне 2 (между кривыми KL и КР) АЧР не работает, регуляторы мощности резервных генераторов увеличивают мощность тех генераторов, у которых динамическая характеристика расположена выше точки, определяющей состояние энергосистемы в данный момент времени. Регуляторы мощности тех генераторов, динамическая характеристика которых в зоне 2 расположена ниже точки состояния системы, не изменяют мощности генераторов. Наклон динамических характеристик между кривыми KL и КР д/1я разных генераторов различен. Это выполняется исходя из обеспечения приоритетности работы разных резервных генераторов, так как зона между кривыми KL и КР есть зона с положительной скоростью изменения частоты (идет процесс повышения частоты) и излишнее увеличение мощности может привести к перерегулированию в энергосистеме. Степень наклона характеристик зависит как от максимальной постоянной времени энергосистемы, так и 5 от погрешности регуляторов генераторов, чтобы из-за погрешности не получилось перехлеста динамических характеристик. Обозначим коэффициент пропорциональности, соответствующий динамической ха- 10 рактеристике, различной для каждого генератора, через Кз.
В зоне 3, выше динамической характеристики КР (общей для всех генераторов) - точка F, подается сигнал на уменьшение 15 мощности всех резервных генераторов. Коэффициент пропорциональности KL соответствующий кривой КР, определяется максимально допустимой скоростью изменения частоты в энергосистеме. 0 Таким образом, можно на фазовой плоскости различить три зоны. Зона 1 - зона дефицита, в которой происходит набор мощности генераторами и работа АЧР. Зона 2 - зона, в которой прекращается работа 5 АЧР, но продолжают набирать мощность все или часть генераторов. Зона 3 - зона избытка мощности, где генераторы начинают снижать генерирующую мощность.
Следовательно, замер частоты и скоро- 0 сти ее изменения позволяет оценить состояние энергосистемы, определить признак ее дефицитности. Одновременный запуск всех генераторов и работа АЧР позволяет ускорить процесс восстановления частоты. 5 Выбор коэффициентов пропорциональности Кп позволяет обеспечить приоритет воздействия на частоту в энергосистеме отдельных групп генераторов под воздействием АЧР, что уменьшает ущерб, уменьшая 0 отключение нагрузки от АЧР.
Предлагаемый способ реализуется в энергосистеме, в которой выделены отдельные резервные генераторы с регуляторами мощности, а также устройства АЧР, распре- 5 деленные в энергосистеме, действующие на отключение части нагрузки. Для реализации способа могут быть применены, например, известные устройства АЧР.
Все устройства АЧР имеют одинаковую 0 динамическую характеристику (кривая KL), a следовательно, одинаковый коэффициент пропорциональности К2 в уравнении динамической характеристики регулирования.
Резервные генераторы ft, Г2Гп име5 ют одинаковую динамическую характеристику КР и различные динамические характеристики, ограничивающие зону 2, т.е. разные коэффициенты пропорциональности Кз , где ...n (номер генератора). Это значит, что разные генераторы имеют
разные наклоны динамических характеристик, от которых зависит набор мощности генераторов. В ходе восстановления частоты в энергосистеме сначала запустятся все резервные генераторы и будут набирать мощность, а также начнут работать все устройства АЧР. Приоритетность работы АЧР будет определяться уставками по частоте и времени. По мере восстановления частоты и увеличения скорости ее изменения траектория состояния энергосистемы будет пересекать поочередно динамические характеристики с коэффициентами Kai . «32 При этом постепенно прекращается набор мощности отдельными генераторами (, Га, ...) и продолжается пока набор мощности только генераторами, динамическая характеристика которых лежит выше точки состояния траектории. Таким образом обеспечивается приоритетность работы резервных генераторов и плавность восстановления частоты.
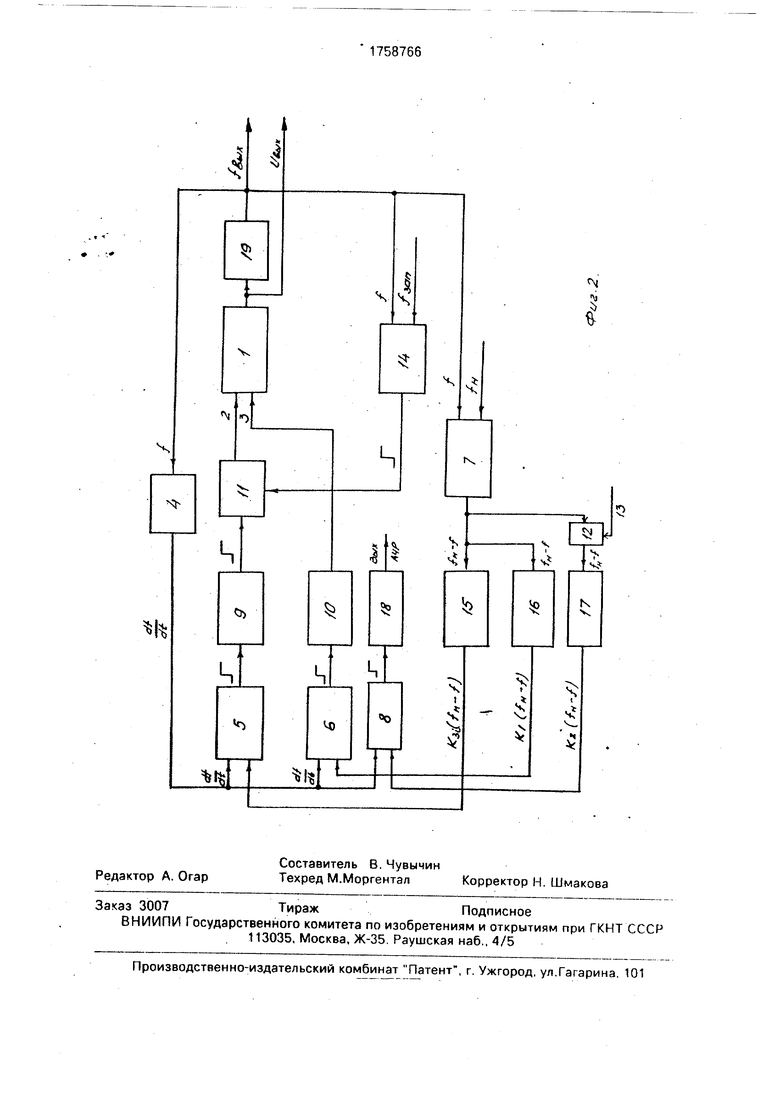
На фиг. 2 показан пример возможной реализации предлагаемого способа восстановления частоты в системе.
Устройство содержит генератор с регулятором 1, регулятор имеет вход 2 на увеличение мощности и вход 3 на уменьшение мощности, дифференциатор 4, четыре сумматора 5-8, исполнительный блок 9 на уве- личение мощности генератора, исполнительный блок 10 на уменьшение мощности генератора, ключ 11, ключ 12, управляемый от входа 13 запуска АЧР, пусковой орган 14, умножители 15-17, исполнительный орган 18 АЧР, блок 19 преобразования, который преобразует переменное выходное напряжение 11вых генератора в постоянное напряжение, пропорциональное текущему значению частоты, или преобразует переменное выходное напряжение Увых генератора в число импульсов, пропорциональное частоте.
Устройство работает следующим образом.
Выходное напряжение генератора 1 преобразуется преобразователем 19 в величину, пропорциональную частоте f. С выхода преобразователя сигналы подаются на пусковой орган 14, дифференциатор 4, сумматор 7. Сигнал с выхода преобразователя 19 частоты дифференцируется блоком 4. При снижении частоты ниже уставки запуска тзап генератора срабатывает пусковой орган 14, подавая сигнал на ключ 11, который подключает выход исполнительного блока 9 с входом 2 регулятора на увеличение мощности генератора. При снижении частоты ниже уставки запуска АЧР f3anA4P подается сигнал управления на вход 13 ключа,12. Сигналы, пропорциональные скорости изменения частоты df/dt, поступают на один из входов сумматоров 5-8. На вторые входы
сумматоров поступают сигналы, пропорциональные величинам KaffH-f) на вход сумматора 5, Ki () на вход сумматора 6 и К2 (fn-f) на вход сумматора 8. Сигналы Ki (fH-f), К2 (fH-f) и Кз (fn-f) формируются следующим
образом.
Сигнал с выхода преобразователя частоты 19 подается на один из входов сумматора 7. Сумматор 7 суммирует (вычитает) сигнал с выхода 19 с постоянным сигналом
fH, пропорциональным номинальной частоте в энергосистеме. Сигнал с выхода сумматора 7 подается на входы умножителей 15-17, которые умножают этот сигнал соответственно на коэффициенты пропорциональности Ка, Ki и «2. Сигнал с выхода 15 подается на вход сумматора 5, с выхода 16 - на вход сумматора 6, а с выхода 17 - на вход сумматора 8. В зависимости от результатов суммирования входных величин сумматор 5 выдает сигнал на увеличение мощности, если df/dt-KaCfH-f) 0. Если df/dt-Ki(fH-f), то сумматор 6 выдает сигнал на уменьшение мощности. Исполнительные блоки 9 и 10 осуществляют управление
регулятором мощности и представляют собой промежуточные усилители, преобразующие электрический сигнал в другие электрические (механические) сигналы управления регуляторами турбин.
Если df/dt-K2(fH-f) S 0, то сумматор 8 выдает сигнал через исполнительный орган 18 АЧР на отключение части потребителей в энергосистеме.
Формула изобретения
Способ автоматического восстановления частоты в энергосистеме при аварийном понижении частоты путем измерения частоты, сравнения ее с уставкой запуска, запуска всех резервных генераторов с
возбуждением одновременно в момент снижения частоты ниже уставки запуска, измерения скорости изменения частоты, определения разницы между номинальной частотой и текущим значением частоты,
сравнения полученной разницы, умноженной на первый коэффициент пропорциональности, определяемый максимальной допустимой скоростью изменения частоты и постоянной времени энергосистемы, со ско5 ростью изменения частоты и подачи сигнала на уменьшение генерируемой мощности при скорости изменения частоты, большей результата сравнения, на ее увеличение - при скорости изменения частоты, меньшей
результата сравнения, отключения очередями части нагрузки устройствами автоматической частотной разгрузки (АЧР) в случае, когда частота ниже уставки запуска АЧР и скорость изменения частоты меньше разности номинального и текущего значения частот, умноженной на второй коэффициент пропорциональности, определяемый максимальной постоянной времени энергосистемы, причем первый коэффициент пропорциональности больше второго, отличающийся тем, что, с целью уменьшения ущерба от частотной аварии, ускорения процесса восстановления частоты и ликвидации дефицита мощности в энергосистеме для каждого 1-го резервного
генератора, где п, дополнительно
вводят третий коэффициент пропорциональности, определяемый максимальной постоянной времени системы и допустимой погрешностью регулятора i-ro генератора, величина которого больше второго и меньше первого коэффициентов пропорциональности, сравнивают значение скорости изменения частоты с двумя величинами, каждая из которых сформирована как разность номинального и текущего значений
5 частот, умноженная на соответственно первый и 1-й третий коэффициенты пропорциональности, причем первую величину с первым коэффициентом пропорциональности устанавливают одинаковой для всех ре0 зервных генераторов, а вторую величину с 1-м третьим коэффициентом пропорциональности - для каждого 1-го генератора ус- танавливают свою, если скорость изменения частоты в каждом 1-м генераторе
5 меньше второй величины, подают сигнал на увеличение генерируемой мощности, если больше второй, но меньше первой величины, то снимают подачу сигнала на увеличение генерируемой мощности, если скорость
0 изменения частоты больше первой величины, то подают сигнал на уменьшение генерируемой мощности.

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматического управления мощностью резервных генераторов при аварийном понижении частоты в энергосистеме | 1989 |
|
SU1684859A1 |
| Способ автоматической частотной разгрузки | 1985 |
|
SU1262625A1 |
| Устройство для аварийного управления нагрузкой энергосистемы по частоте (его варианты) | 1983 |
|
SU1098065A1 |
| Реле частоты | 1981 |
|
SU1014085A2 |
| Система управления накопителем электрической энергии для расширения области допустимых режимов генерирующих установок источников распределенной генерации при кратковременных отклонениях частоты | 2019 |
|
RU2718113C1 |
| Способ комбинированной автоматической частотной разгрузки | 1982 |
|
SU1051646A1 |
| Способ автоматической частотной разгрузки энергосистемы | 1986 |
|
SU1385185A1 |
| Способ управления асинхронизированным электромеханическим преобразователем частоты | 1984 |
|
SU1354334A1 |
| Способ автоматической частотной разгрузки или частотного пуска генераторов | 1979 |
|
SU864429A1 |
| Реле частоты с зависимой характеристикой выдержки времени | 1980 |
|
SU902096A1 |
Использование, в энергетике, в проти- воаварийной автоматике для восстановления частоты после ее аварийного понижения. Сущность изобретения: при аварийном понижении частоты ниже уставки производят запуск всех резервных генераторов, производят устройствами автоматической частотной разгрузки (АЧР) отключение части нагрузки С целью уменьшения ущерба каждому i-му резервному генератору задают свою характеристику регулирования, задаваемую третьим коэффициентом пропорциональности Кз1 . Общую для всех резервных генераторов характеристику регулирования задают первым коэффициентом пропорциональности Кь при этом К2. Измеряют df/dt если df/dt3r K3i (f-fn). то подают сигнал на увеличе ние мощности 1-го генератора, если Ki(f-fn) df/dt K3i (f-fn). то снимаю сиг нал на увеличение мощности, если df/dt Ki(f-fH), то подают сигнал на уменьшение генерируемой мощности 2 ил
Фи&1
| Барзам А В | |||
| Системная автоматика | |||
| М.: ГЭИ, 1959, с 256 Рабинович Р С | |||
| Автоматическая частотная разгрузка энергосистем | |||
| М.: Энергия, 1980 | |||
| с | |||
| Транспортер для перевозки товарных вагонов по трамвайным путям | 1919 |
|
SU105A1 |
| Способ автоматической частотной разгрузки | 1985 |
|
SU1262625A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
