По&ерхность
(/:
с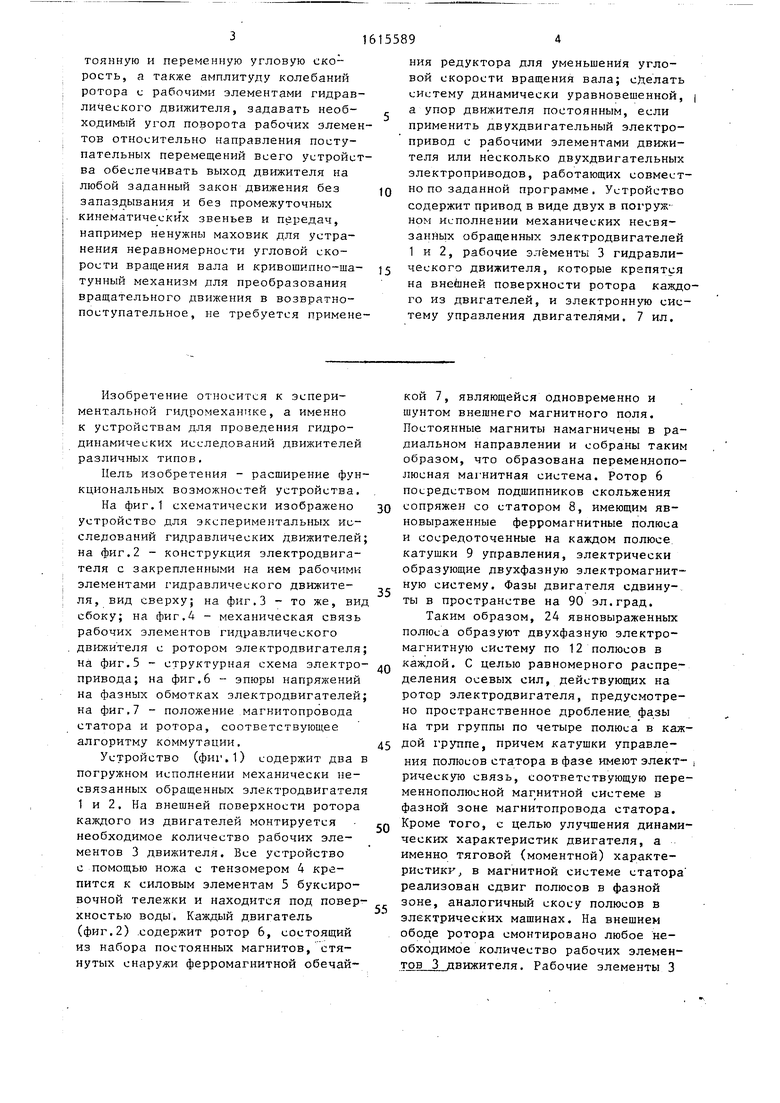
Изобретение относится к экспериментальной гидромеханике, а именно к устройствам для проведения гидродинамических исследований движителей различных типов. Цель изобретения - расширение функциональных возможностей устройства, что позволяет при использовании его варьировать в широких пределах геометрические и кинематические параметры рабочих элементов движителя (рабочие элементы могут быть выполнены в виде системы крыльев, лопастей винта или лопастей крыльчатого движителя)
задавать вполне определенную постоянную и переменную угловую скорость, а также амплитуду колебаний ротора с рабочими элементами гидравлического движителя
задавать необходимый угол поворота рабочих элементов относительно направления поступательных перемещений всего устройства
обеспечивать выход движителя на любой заданный закон движения без запаздывания и без промежуточных кинематических звеньев и передач, например не нужны маховик для устранения неравномерности угловой скорости вращения вала и кривошипно-шатунный механизм для преобразования вращательного движения в возвратно-поступательное, не требуется применения редуктора для уменьшения угловой скорости вращения вала
сделать систему динамически уравновешенной, а упор движителя постоянным, если применить двухдвигательный электропривод с рабочими элементами движителя или несколько двухдвигательных электроприводов, работающих совместно по заданной программе. Устройство содержит привод в виде двух в погружном исполнении механических несвязанных обращенных электродвигателей 1 и 2, рабочие элементы 3 гидравлического движителя, которые крепятся на внешней поверхности ротора каждого из двигателей, и электронную систему управления двигателями. 7 ил.
СП
;д
00
тоянную и переменную угловую скорость, а также амплитуду колебаний ротора с рабочими элементами гидравлического движителя, задавать необходимый угол поворота рабочих элементов относительно направления поступательных перемещений всего устройства обеспечивать выход движителя на любой заданный закон движения без запаздывания и без промежуточных кинематических звеньев и передач, например ненужны маховик для устранения неравномерности угловой скорости вращения вала и кривошипно-ша- тунный механизм для преобразования вращательного движения в возвратно- поступательное, не требуется примене35
Изобретение относится к эспери- ментальной гидромеханике, а именно к устройствам для проведения гидродинамических исследований движителей различных типов.
Цель изобретения - расширение функциональных возможностей устройства.
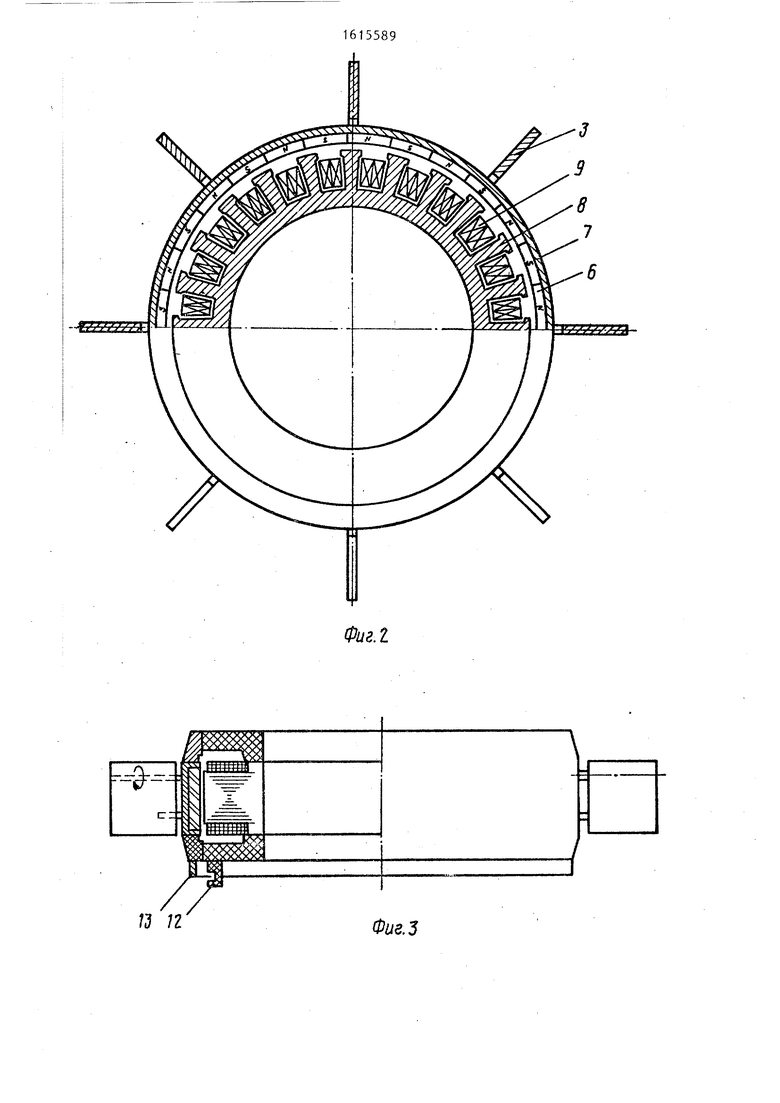
На фиг,1 схематически изображено ЗО устройство для экспериментальных исследований гидравлических движителей; на фиг.2 - конструкция электродвигателя с закрепленными на нем рабочими элементами гидравлического движите- ля, вид сверху; на фиг.З - то же, вид сбоку; на фиг.4 - механическая связь рабочих элементов гидравлического движителя с ротором электродвигателя; на фиг,5 - структурная схема электро- .Q привода; на фиг,6 - эпюры напряжений на фазных обмотках электродвигателей; на фиг.7 - положение магнитопровода статора и ротора, соответствующее алгоритму коммутации.45
Устройство (фиг.1) содержит два в погружном исполнении механически несвязанных обращенных электродвигателя 1 и 2. На внешней поверхности ротора каждого из двигателей монтируется п необходимое количество рабочих элементов 3 движителя. Все устройство с помощью ножа с тензомером 4 крепится к силовым элементам 5 буксировочной тележки и находится под поверхностью воды. Каждый двигатель (фиг.2) .содержит ротор 6, состоящий из набора постоянных магнитов, стянутых снаружи ферромагнитной обечай55
ния редуктора для уменьшения угловой скорости вращения вала; сделать систему динамически уравновешенной, а упор движителя постоянным, если применить двухдвигательный электропривод с рабочими элементами движителя или несколько двухдвигательных электроприводов, работающих совместно по заданной программе. Устройство содержит привод в виде двух в погружном Исполнении механических несвязанных обращенных электродвигателей 1 и 2, рабочие элементы 3 гидравлического движителя, которые крепятся на внешней поверхности ротора каждого из двигателей, и электронную систему управления двигателями. 7 ил.
5
О Q 5
п
5
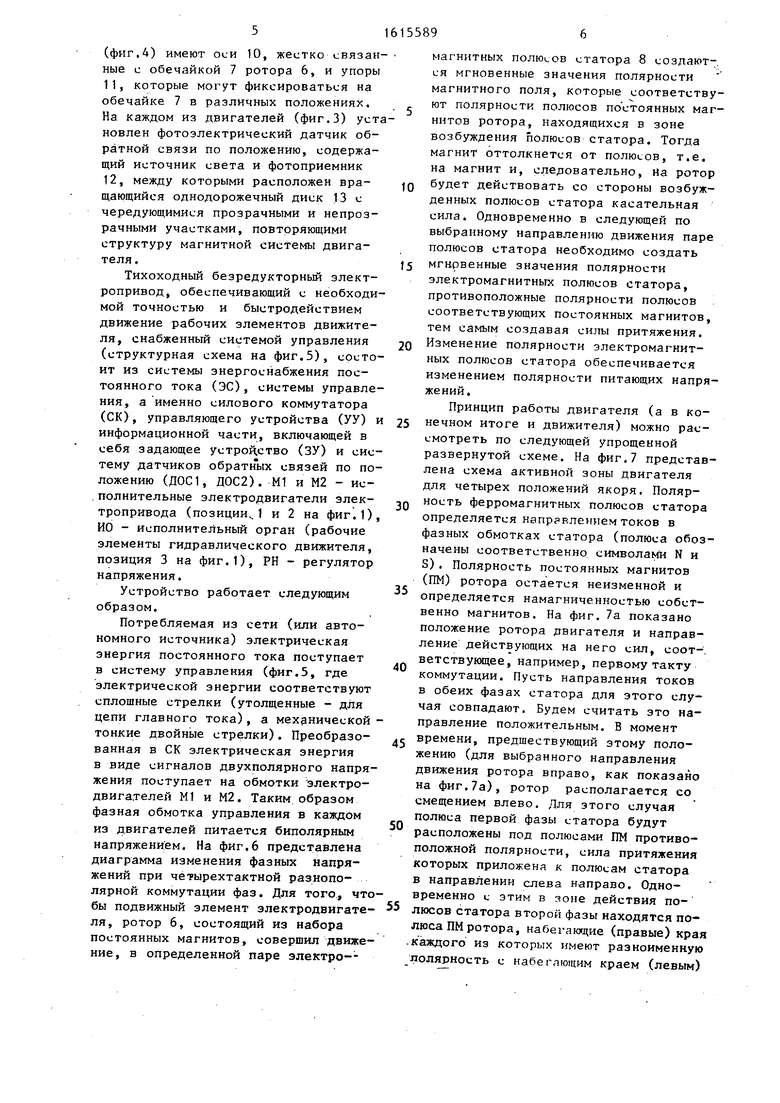
кой 7, являющейся одновременно и шунтом внешнего магнитного поля. Постоянные магниты намагничены в радиальном направлении и собраны таким образом, что образована переменнопо- люсная маг нитная система. Ротор 6 посредством подшипников скольжения сопряжен со статором 8, имеющим яв- новыраженные ферромагнитные полюса и сосредоточенные на каждом полюсе катушки 9 управления, электрически образующие двухфазную электромагнитную систему. Фазы двигателя сдвинуты в пространстве на 90 эл.град.
Таким образом, 24 явновыраженных полюса образуют двухфазную электромагнитную систему по 12 полюсов в каждой, С целью равномерного распределения осевых сил, действующих на ротор электродвигателя, предусмотрено пространственное дробление, фазы на три группы по четыре полюса в каждой группе, причем катушки управления полюсов статора в фазе имеют элект- i рическую связь, соответствующую пере- меннополюсной магнитной системе в фазной зоне магнитопровода статора. Кроме того, с целью улучшения динамических характеристик двигателя, а именно тяговой (моментной) характеристики в магнитной системе статора реализован сдвиг полюсов в фазной зоне, аналогичный скосу полюсов в электрических машинах. На внешнем ободе ротора смонтировано любое необходимое количество рабочих элемен- тов 3 движителя. Рабочие элементы 3
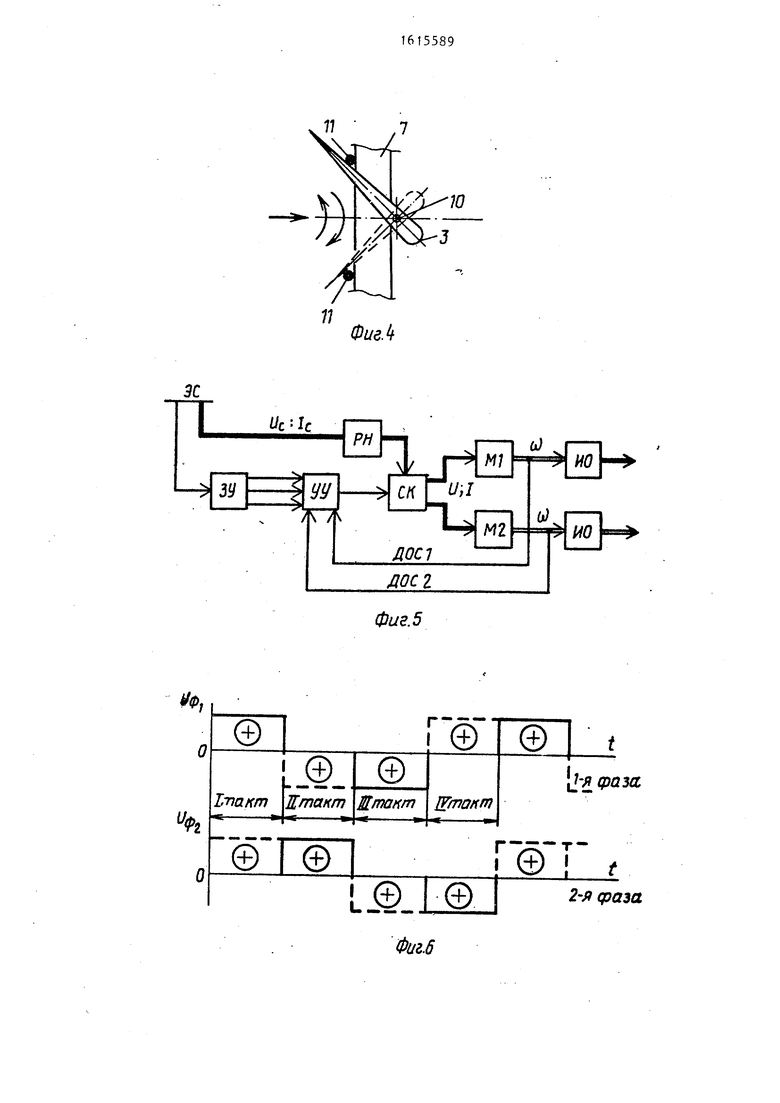
(фиг,А) имеют оси 10, жестко связан ные с обечайкой 7 ротора 6, и упоры 1 1, которые могут фиксироваться на обечайке 7 в различных положениях. На каждом из двигателей (фиг.З) устновлен фотоэлектрический датчик обратной связи по положению, содержащий источник света и фотоприемник 12, между которыми расположен вращающийся однодорожечный диск 13 с чередующимися прозрачными и непрозрачными участками, повторяющими структуру магнитной системы двигателя.
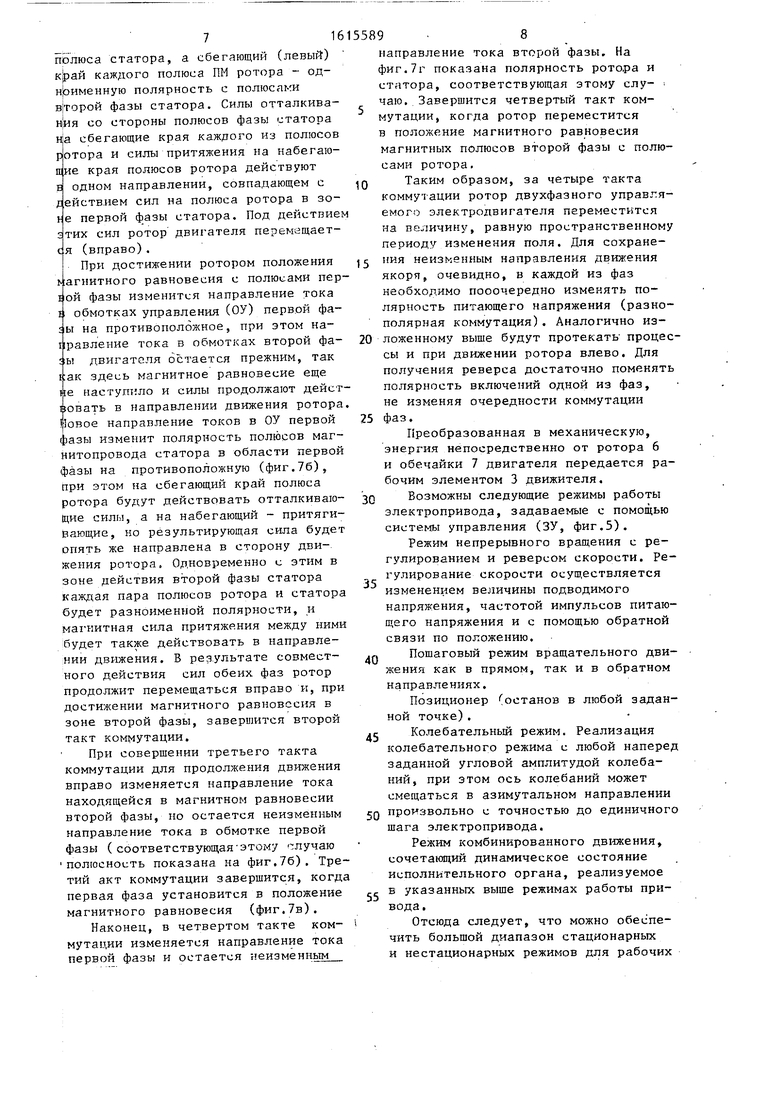
Тихоходный безредукторный электропривод, обеспечивающий с необходимой точностью и быстродействием движение рабочих элементов движителя, снабженный системой управления (структурная схема на фиг.З), состоит из системы энергоснабжения постоянного тока (ЭС), системы управления, а именно силового коммутатора (СК), управляющего устройства (УУ) информационной части, включающей в себя задающее устройство (ЗУ) и систему датчиков обратн ых связей по положению (ДОС1, ДОС2). Ml и М2 - исполнительные электродвигатели электропривода (позиции, 1 и 2 на фиг . 1) ИО - исполнительный орган (рабочие элементы гидравлического движителя, позиция 3 на фиг.1), РН - регулятор напряжения.
Устройство работает следующим образом.
Потребляемая из сети (или автономного источника) электрическая энергия постоянного тока поступает в систему управления (фиг.З, где электрической энергии соответствуют сплошные стрелки (утолщенные - для цепи главного тока), а механической тонкие двойные стрелки). Преобразованная в СК электрическая энергия в виде сигналов двухполярного напряжения поступает на обмотки электродвигателей Ml и М2. Таким образом фазная обмотка управления в каждом из двигателей питается биполярным напряжением. На фиг.6 представлена диаграмма изменения фазных напряжений при четырехтактной разнопо- лярной коммутации фаз. Для того, чтобы подвижный элемент электродвигателя, ротор 6, состоящий из набора постоянных магнитов, совершил движение, в определенной паре электро-магнитных полюсов статора 8 создаются мгновенные значения полярности магнитного поля, которые соответствуют полярности полюсов по стоянных магнитов ротора, находящихся в зоне возбуждения полюсов статора. Тогда магнит оттолкнется от полюсов, т.е. на магнит и, следовательно. На ротор
10 будет действовать со стороны возбужденных полюсов статора касательная сила. Одновременно в следующей по выбранному направлению движения паре полюсов статора необходимо создать
J5 мгновенные значения полярности электромагнитных полюсов статора, противоположные полярности полюсов : соответствующих постоянных магнитов, тем самым создавая силы притяжения.
20 Изменение полярности электромагнитных полюсов статора обеспечивается изменением полярности питающих напряжений.
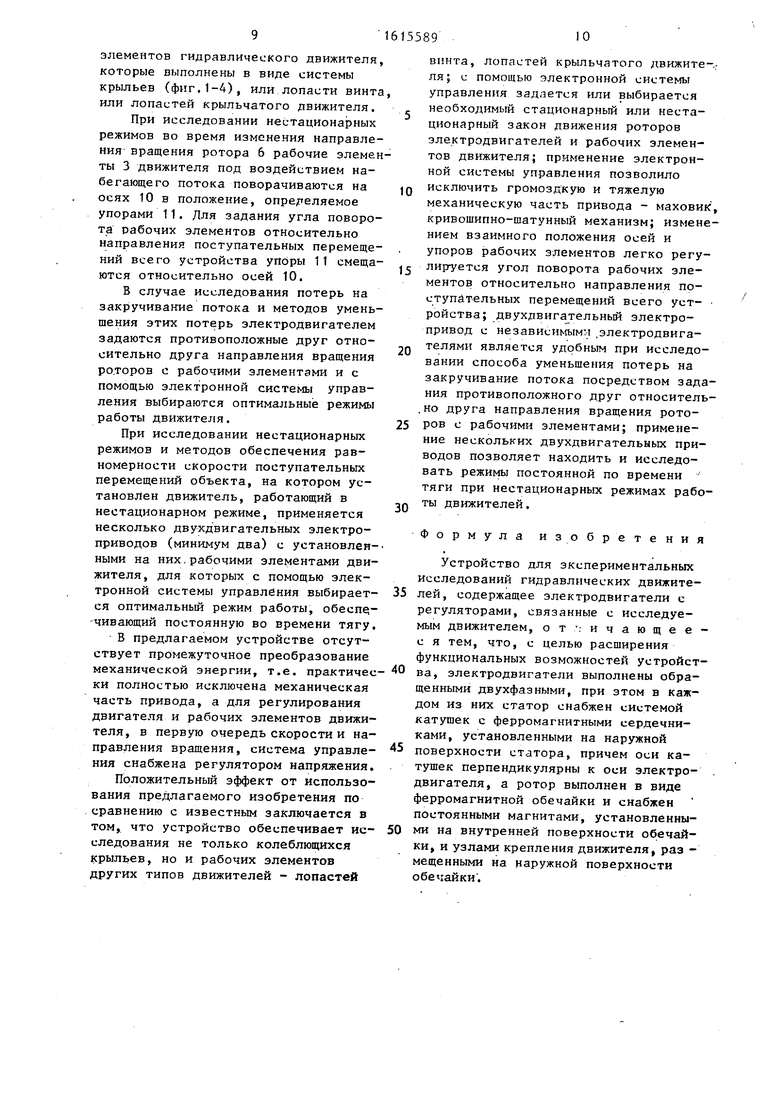
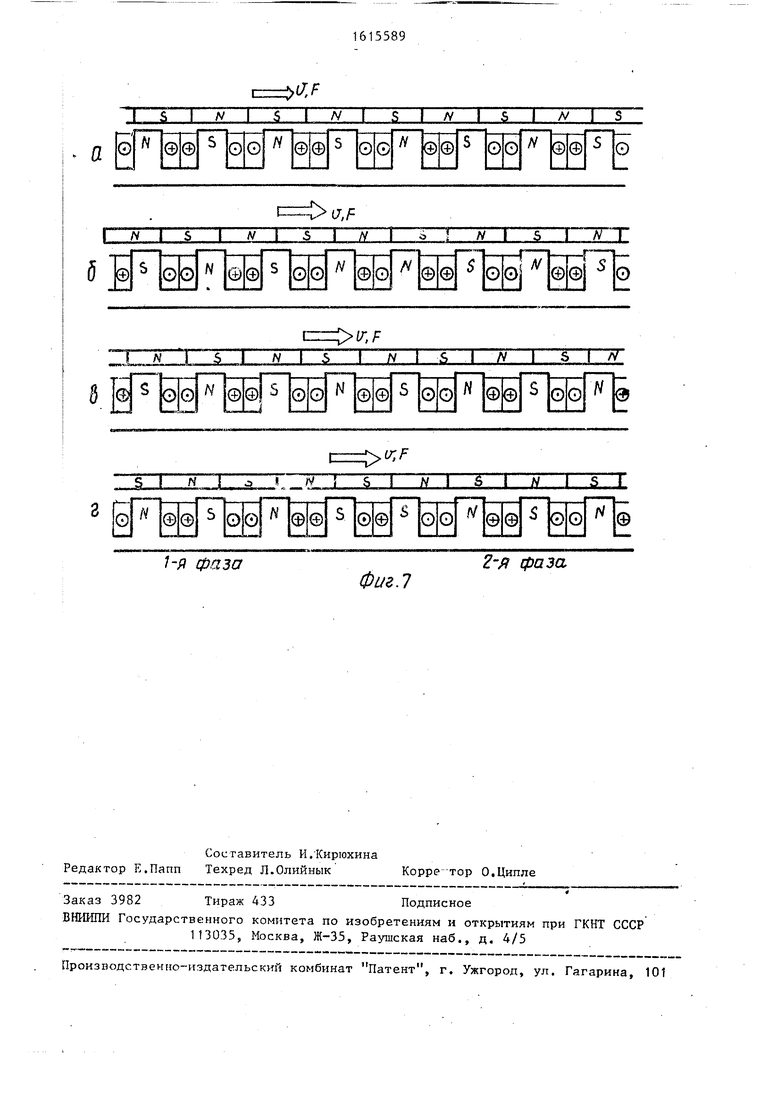
Принцип работы двигателя (а в ко25 нечном итоге и движителя) можно рассмотреть по следующей упрощенной развернутой схеме. На фиг.7 представлена схема активной зоны двигателя для четырех положений якоря. Поляр30 ность ферромагнитных полюсов статора определяется направлением токов в фазных обмотках статора (полюса обозначены соответственно символами N и S). Полярность постоянных магнитов
(ПМ) ротора остается неизменной и определяется намагниченностью собственно магнитов. На фиг. 7а показано положение ротора двигателя и направление действующих на него сил, соот-,
Р ветствующее, например, первому такту
коммутации. Пусть направления токов в обеих фазах статора для этого случая совпадают. Будем считать это направление положительным. В момент 5 времени, предшествующий этому положению (для выбранного направления движения ротора вправо, как показано на фиг.7а), ротор располагается со смещением влево. Для этого случая полюса первой фазы статора будут
расположены под полюсами ПМ противо- положной полярности, сила притяжения которых приложена к полюсам статора в направлении слева направо. Одно- временно с этим в зоне действия полюсов статора второй фазы находятся полюса ПМротора, набегающие (правые) края -каждого из которых имеют разноименную ;лоля ность с набеглющим краем (левым)
полюса статора, а сбегающий (левый) фай каждого полюса ПМ ротора - од- нЬименную полярность с полюсами BJTopoft фазы статора. Силы отталкива- со стороны полюсов фазы статора HJa сбегающие края каждого из полюсов ротора и силы притяжения на набегаю- шие края полюсов ротора действуют одном направлении, совпадающем с
в
рекстзнем сил на полюса ротора в зо1-е первой фазы статора. Под действием
тих сил ротор двигателя перемещается (вправо) .
При достижении ротором положения агнитного равновесия с полюсами пер ой фазы изменится направление тока , обмотках управления (ОУ) первой фа- ы на противоположное, при этом на- равление тока в обмотках второй фа- :ы двигателя остается прежним, так :ак здесь магнитное равновесие еще te наступило и силы продолжают действовать в направлении движения ротора йовое направление токов в ОУ первой фазы изменит полярность полюсов маг- нитопровода статора в области первой фазы на противоположную (фиг.76), при этом на сбегающий край полюса ротора будут действовать отталкивающие силы, а на набегающий - притягивающие, но результирующая сила будет опять же направлена в сторону движения ротора. Одновременно с этим в зоне действия второй фазы статора каждая пара полюсов ротора и статора будет разноименной полярности, и магнитная сила притяжения между ними будет также действовать в направлении движения. В результате совместного действия сил обеих фаз ротор продолжит перемещаться вправо и, при достижении магнитного равновесия в зоне второй фазы, завершится второй такт коммутации.
При совершении третьего такта коммутации для продолжения движения вправо изменяется направление тока находящейся в магнитном равновесии второй фазы, но остается неизменным направление тока в обмотке первой фазы ( соответствующая ЭТОМУ случаю полюсность показана на фиг,76). Третий акт коммутации завершится, когд первая фаза установится в положение магнитного равновесия (фиг,7в).
Наконец, в четвертом такте коммутации изменяется направление тока первой фазы и остается неизменным
5
5
3Q
0
направление тока второй фазы. На фиг.7г показана полярность ротора и статора, соответствующая этому елу- чаю. Завершится четвертый такт коммутации, когда ротор переместится в положение магнитного равновесия магнитных полюсов второй фазы с полюсами ротора.
Таким образом, за четыре такта коммутации ротор двухфазного управляемого электродвигателя переместится на величину, равную пространственному периоду изменения поля. Для сохранения неизменным направления движения якоря, очевидно, в каждой из фаз необходимо пооочередно изменять полярность питающего напряжения (разно- полярная коммутация), Аналогично изложенному выше будут протекать процессы и при движении ротора влево. Для получения реверса достаточно поменять полярность включений одной из фаз, не изменяя очередности коммутации фаз.
Преобразованная в механическую, энергия непосредственно от ротора 6 и обечайки 7 двигателя передается рабочим элементом 3 движителя.
Возможны следующие режимы работы электропривода, задаваемые с помощью системы управления (ЗУ, фиг,5),
Режим непрерывного вращения с регулированием и реверсом скорости. Регулирование скорости осуществляется изменением величины подводимого напряжения, частотой импульсов питающего напряжения и с помощью обратной связи по положению.
Пошаговый режим вращательного движения как в прямом, так и в обратном направлениях.
Позиционер останов в любой заданной точке),
Колебательный режим. Реализация колебательного режима с любой наперед заданной угловой амплитудой колебаний, при этом ось колебаний может смещаться в азимутальном направлении СП произвольно с точностью до единичного шага электропривода.
Режим комбинированного движения, сочетающий динамическое состояние исполнительного органа, реализуемое в указанных выше режимах работы привода.
Отсюда следует, что можно обеспечить большой диапазон стационарных и нестационарных режимов для рабочих
40
45
элементов гидравлического движителя которые выполнены в виде системы крыльев (фиг.1-4), или лопасти винт или лопастей крыльчатого движителя. При исследовании нестационарных режимов во время изменения направления вращения ротора 6 рабочие элеметы 3 движителя под воздействием набегающего потока поворачиваются на осях 10 в положение, oпpe тeляeмoe упорами 11. Для задания угла поворота рабочих элементов относительно направления поступательных перемещений всего устройства упоры 11 смещаются относительно осей 10.
В случае исследования потерь на закручивание потока и методов уменьшения этих потерь электродвигателем задаются противоположные друг относительно друга направления вращения ро.торов с рабочими элементами и с помощью электронной системы управления выбираются оптимальные режимы работы движителя.
При исследовании нестационарных режимов и методов обеспечения равномерности скорости поступательных перемещений объекта, на котором установлен движитель, работающий в нестационарном режиме, применяется несколько двухдвигательных электроприводов (минимум два) с установленными на них,рабочими элементами движителя, для которых с помощью электронной системы управления выбирается оптимальный режим работы, обесп - -чивающий постоянную во времени тягу, В предлагаемом устройстве отсутствует промежуточное преобразование механической энергии, т.е. практически полностью исключена механическая часть привода, а для регулирования двигателя и рабочих элементов движителя, в первую очередь скорости и направления вращения, система управления снабжена регулятором напряжения. Положительный эффект от использования предлагаемого изобретения по сравнению с известным заключается в том, что устройство обеспечивает исследования не только колеблющихся крыльев, но и рабочих элементов других типов движителей - лопастей
0
5
0
5
0
винта, лопастей крыльчатого движите-..- ля; с помощью электронной системы управления задается или выбирается необходимый стационарный или нестационарный закон движения роторов электродвигателей и рабочих элементов движителя; применение электронной системы управления позволило исключить громоздкую и тяжелую механическую часть привода - маховик, кривощипно-шатунный механизм; изменением взаимного положения осей и упоров рабочих элементов легко регулируется угол поворота рабочих элементов относительно направления по- ступйтельных перемещений всего уст- ройства; двухдвига тельный электропривод с независимыми .электродвигателями является удобным при исследовании способа уменьщения потерь на закручивание потока посредством задания противоположного друг относитель- .но друга направления вращения роторов с рабочими элементами; применение нескольких двухдвигательных приводов позволяет находить и исследовать режимы постоянной по времени - тяги при нестационарных режимах работы движителей.
Формула изобр
е т е н и я
5
0
5
0
Устройство для экспериментальных исследований гидравлических движителей, содержащее электродвигатели с регуляторами, связанные с исследуемым движителем, о т л- и ч а ю щ е е - с я тем, что, с целью расширения функциональных возможностей устройства, электродвигатели выполнены обращенными двухфазными, при этом в каждом из них статор снабжен системой катушек с ферромагнитными сердечниками, установленными на наружной поверхности статора, причем оси ка- тущек перпендикулярны к оси электродвигателя, а ротор выполнен в виде ферромагнитной обечайки и снабжен постоянными магнитами, установленными на внутренней поверхности обечайки, и узлами крепления движителя, раз - мещенными на наружной поверхности обечайки .
Фиг.г
п п
Фие.З
11
У.
Uc-k
ЗУ
УУ
РН -II1
. гЧ
|7/ГГ /;/
/
;
О
и.
Рг
iTiuKm
О
ФигЛ
о;
L
мг
{J
ДОС
мое г
Фие.5
гж
Жтакт
7тант
j: срага.
t
H-J
2-я (раза
ir,/:
l
1-Й фаза
Фиг.7
2 я фаза
| Стенд для исследований судовой пропульсивной установки | 1986 |
|
SU1402824A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
