(54) МАГНИТНАЯ СИСТЕМА ПРИВОДА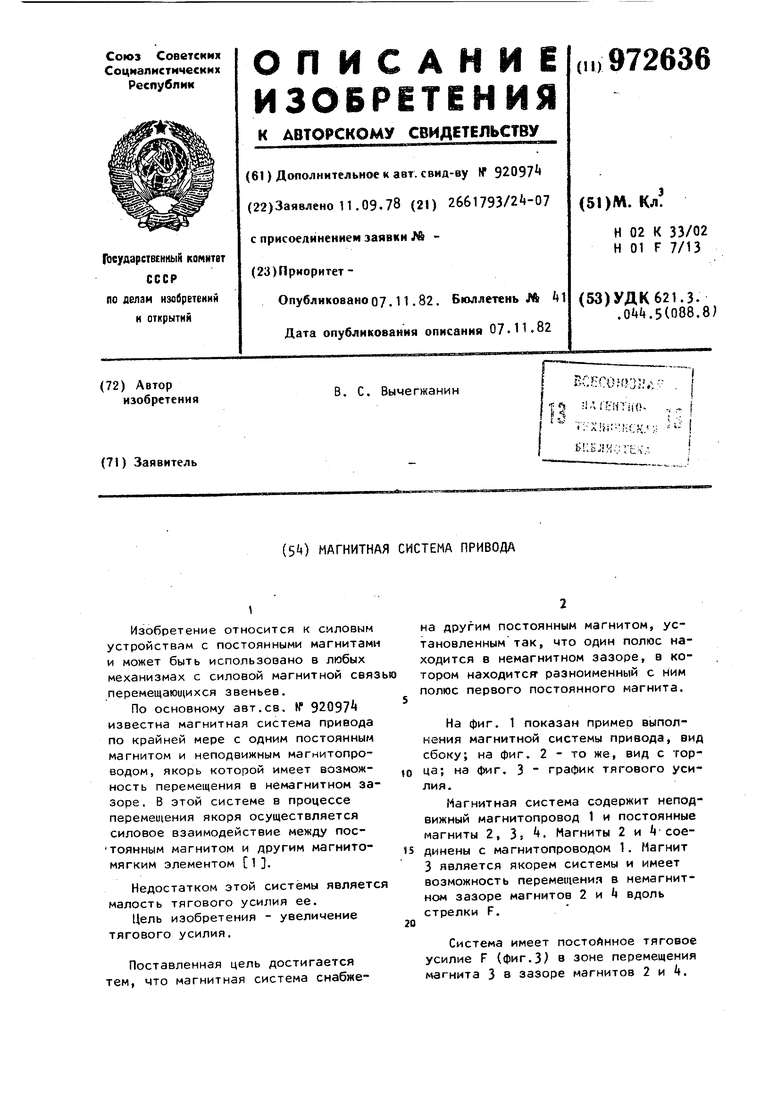
| название | год | авторы | номер документа |
|---|---|---|---|
| Магнитная система привода | 1973 |
|
SU920974A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ТЯГОВОГО УСИЛИЯ ЯКОРЯ МАГНИТНОГО ПРИВОДА | 2007 |
|
RU2340025C1 |
| МАГНИТНАЯ СИСТЕМА ПРИВОДА С РЕГУЛИРУЕМЫМ ТЯГОВЫМ УСИЛИЕМ | 2003 |
|
RU2263361C2 |
| МАГНИТНАЯ СИСТЕМА ПРИВОДА | 2010 |
|
RU2461904C2 |
| СПОСОБ УПРАВЛЕНИЯ МАГНИТНЫМ ПОТОКОМ И ЭЛЕКТРОМАГНИТНАЯ ПОЛЯРИЗОВАННАЯ СИСТЕМА С ПОСТОЯННЫМ МАГНИТОМ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2687230C1 |
| Магнитоэлектрический преобразователь | 1979 |
|
SU836733A1 |
| СПОСОБ ФИКСАЦИИ И ПРИВОДА РИГЕЛЯ ЗАМКА И МАГНИТОЭЛЕКТРИЧЕСКИЙ ЗАМОК (ВАРИАНТЫ) | 2010 |
|
RU2487225C2 |
| Двигатель возвратно-поступательного движения | 1990 |
|
SU1758789A1 |
| Электромагнитная переключающая муфта | 1991 |
|
SU1784781A1 |
| МАГНИТНОЕ ПОРОГОВОЕ УСТРОЙСТВО | 2012 |
|
RU2522891C2 |
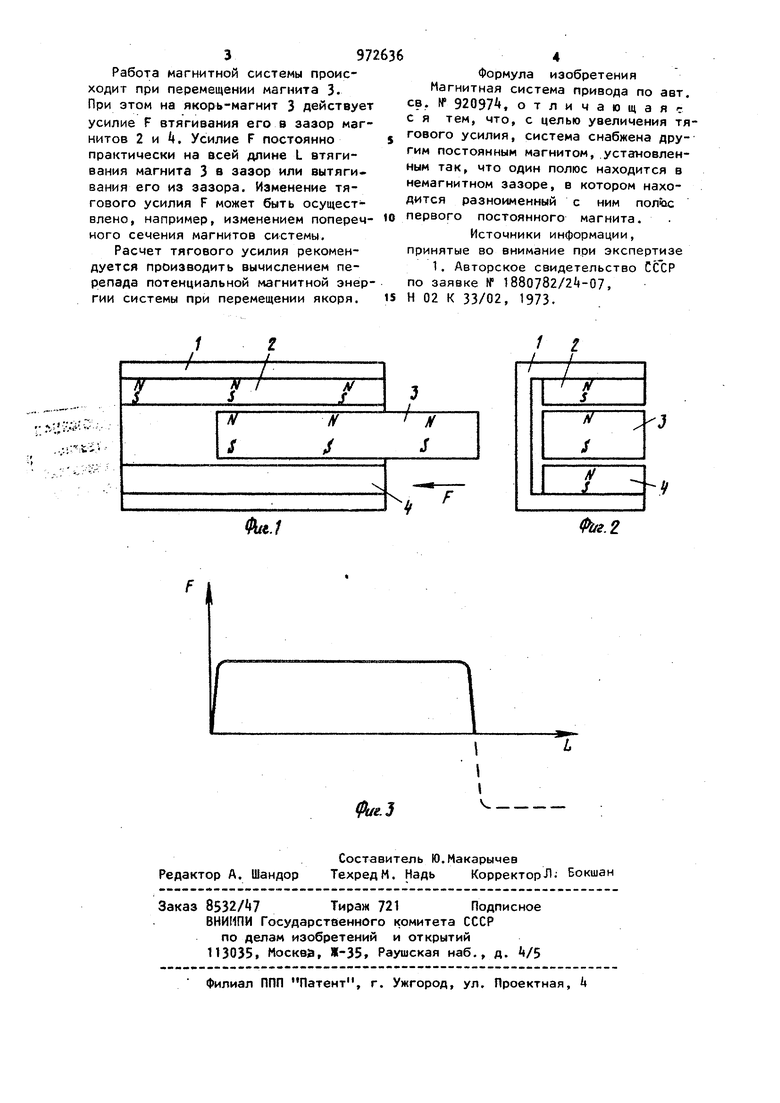
Изобретение относится к силовым устройствам с постоянными магнитам и может быть использооано в любых механизмах с силовой магнитной свя перемещающихся звеньев. По основному авт.св. № 92097 известна магнитная система привода по крайней мере с одним постоянным магнитом и неподвижным магнитопроеодом, якорь которой имеет возможность перемещения в немагнитном за зоре. В этой системе в процессе перемещения якоря осуществляется силовое взаимодействие между постоянным магнитом и другим магнитомягким элементом 1. Недостатком этой системы являетс малость тягового усилия ее. Цель изобретения - увеличение тягового усилия. Поставленная цель достигается тем, что магнитная система снабжена другим постоянным магнитом, установленным так, что один полюс находится в немагнитном зазоре, в котором находится разноименный с ним полюс первого постоянного магнита. На фиг. 1 показан пример выполнения магнитной системы привода, вид сбоку; на фиг. 2 - то же, вид с торца; на фиг. 3 график тягового усилия. Нагнитиая система содержит неподвижный магнитопровод 1 и постоянные магниты 2, 3« . Магниты 2 и соединены с магнитопроводом 1. Магнит 3 является якорем системы и имеет возможность перемещения в немагнитном зазоре магнитов 2 и вдоль стрелки F. Система имеет постоянное тяговое усилие F (фиг.З) в зоне перемещения магнита 3 в зазоре магнитов 2 и .
3972
Работа магнитной системы происходит при перемещении магнита 3. При этом на якорь-магнит 3 действует усилие F втягивания его в зазор магнитов 2 и 4. Усилие F постоянно практически на всей длине L втягивания магнита 3 в зазор или вытягивания его из зазора. Изменение тягового усилия F может быть осуществлено, например, изменением поперечного сечения магнитов системы.
Расчет тягового усилия рекомендуется производить вычислением перепада потенциальной магнитной энергии системы при перемещении якоря.
а
N /
tj
Формула изобретения Магнитная система привода по авт св. № 920974, отличающая г с я тем, что, с целью увеличения тягового усилия, система снабжена другим постоянным магнитом, установленным так, что один полюс находится в немагнитном зазоре, в котором находится разноименный с ним полЬс первого постоянного магнита.
Источники информации, принятые во внимание при экспертизе
н
S
Фиг. 2.
