Изобретение относится к прикладной механике, конкретнее к поршневым механизмам и предназначено для использования в различных областях техники, например в робототехнике в качестве исполнительного механизма с управляемым движением.
Целью изобретения является расширение диапазона регулирования скорости выходного элемента.
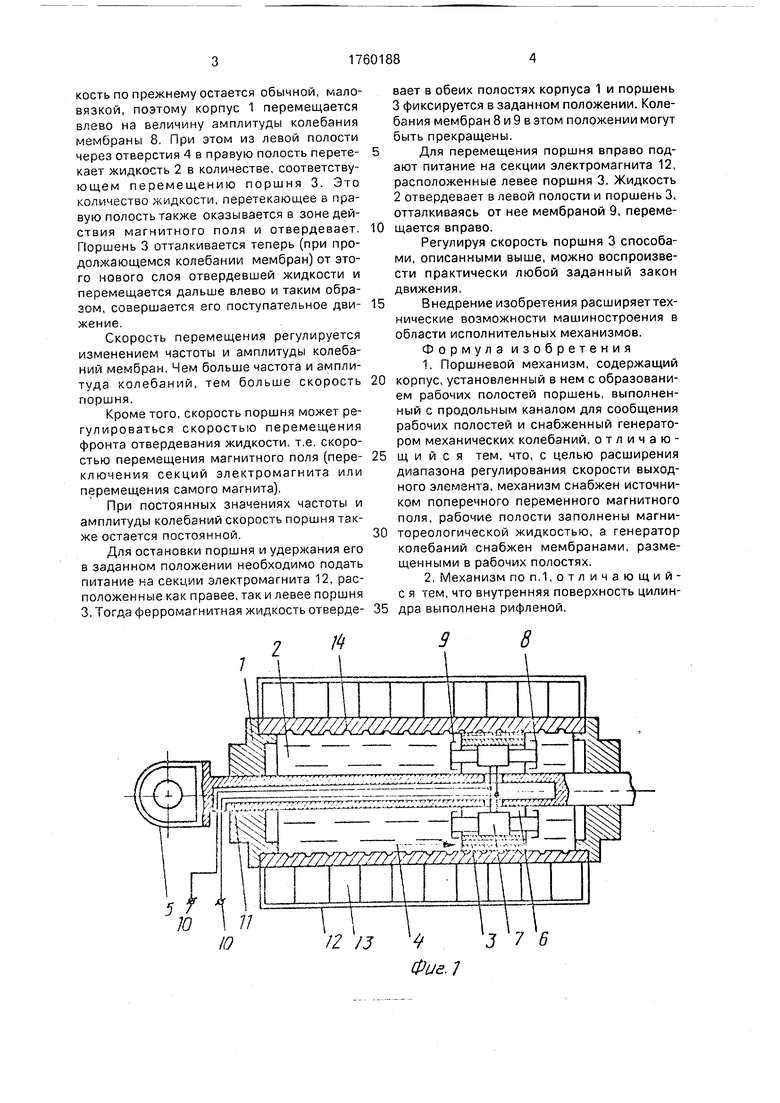
На фиг.1 изображен механизм, продольный разрез, на фиг 2 - то же. вариант исполнения.
Поршневой механизм состоит из корпуса 1, заполненного ферромагни гной жидко- стью 2, поршня 3 с продольными отверстиями 4 и двухсторонним штоком 5. В теле поршня 3 выполнены также отверстия 6, в которых установлены генераторы механических колебаний 7 (например пъезокри- сталлы), отверстия 6 с обеих сторон поршня закрыты общими мембранами 8 и 9, скрепленными с генераторами механических колебаний 7. Питание генераторов колебаний
7 осуществляется с помощью проводки 10, проложенной в полости 11 штока 5 Корпус 1 размещен внутри секционного электромагнита 12, выполненного в виде набора из отдельных соленоидов 13.
Внутренняя поверхность корпуса 1 может быть выполнена рифленой, например, иметь кольцевые канавки 14.
По варианту на фиг.2 магнит 12 выполнен с возможностью перемещения вдоль оси корпуса 1.
Работает поршневой механизм следующим образом.
Пусть поршень 3 занимает положение показанное на фиг 1. Для перемещения поршня влево подают питание на генераторы колебаний 7. При этом мембраны 8 совершают колебания в направлении вдоль оси корпуса 1. Подают питание на секции 13 электромагнита 12, расположенные правее поршня 13, при этом ферромагнитная жидкость 2 в правой полости корпуса 1 отвердевает и мембрана 8 отталкивается от нее, как от твердого тела. В левой же полости жидМ
О
о
со
кость по прежнему остается обычной, маловязкой, поэтому корпус 1 перемещается влево на величину амплитуды колебания мембраны 8. При этом из левой полости через отверстия 4 в правую полость перетекает жидкость 2 в количестве, соответствующем перемещению поршня 3. Это количество жидкости, перетекающее в правую полость также оказывается в зоне действия магнитного поля и отвердевает. Поршень 3 отталкивается теперь (при продолжающемся колебании мембран) от этого нового слоя отвердевшей жидкости и перемещается дальше влево и таким образом, совершается его поступательное движение.
Скорость перемещения регулируется изменением частоты и амплитуды колебаний мембран. Чем больше частота и амплитуда колебаний, тем больше скорость поршня.
Кроме того, скорость поршня может регулироваться скоростью перемещения фронта отвердевания жидкости, т.е. скоростью перемещения магнитного поля (пере- ключения секций электромагнита или перемещения самого магнита).
При постоянных значениях частоты и амплитуды колебаний скорость поршня также остается постоянной.
Для остановки поршня и удержания его в заданном положении необходимо подать питание на секции электромагнита 12, расположенные как правее, так и левее поршня 3. Тогда ферромагнитная жидкость отвердевает в обеих полостях корпуса 1 и поршень 3 фиксируется в заданном положении. Колебания мембран 8 и 9 в этом положении могут быть прекращены.
Для перемещения поршня вправо подают питание на секции электромагнита 12, расположенные левее поршня 3. Жидкость 2 отвердевает в левой полости и поршень 3, отталкиваясь от нее мембраной 9, перемещается вправо.
Регулируя скорость поршня 3 способами, описанными выше, можно воспроизвести практически любой заданный закон движения.
Внедрение изобретения расширяеттех- нические возможности машиностроения в области исполнительных механизмов. Формула изобретения
1.Поршневой механизм, содержащий корпус, установленный в нем с образованием рабочих полостей поршень, выполненный с продольным каналом для сообщения рабочих полостей и снабженный генератором механических колебаний, отличающ и и с я тем, что, с целью расширения диапазона регулирования скорости выходного элемента, механизм снабжен источником поперечного переменного магнитного поля, рабочие полости заполнены магнитореологической жидкостью, а генератор колебаний снабжен мембранами, размещенными в рабочих полостях.
2.Механизм по п.1, о т л ичающий- с я тем, что внутренняя поверхность цилиндра выполнена рифленой.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОРШНЕВОЙ МЕХАНИЗМ | 1991 |
|
RU2036334C1 |
| ПОЗИЦИОННЫЙ ПРИВОД | 1993 |
|
RU2106543C1 |
| МАГНИТОРЕОЛОГИЧЕСКИЙ АМОРТИЗАТОР | 2014 |
|
RU2561610C1 |
| Регулируемый магнитореологический пневматический амортизатор | 2021 |
|
RU2764210C1 |
| Магнитореологический амортизатор | 2015 |
|
RU2645484C2 |
| УСТРОЙСТВО ДЛЯ СОЗДАНИЯ ИМПУЛЬСНОГО РЕЖИМА НАГРУЖЕНИЯ ИСПОЛНИТЕЛЬНЫХ ОРГАНОВ ТЕХНОЛОГИЧЕСКИХ МАШИН | 2010 |
|
RU2435992C1 |
| Гидроимпульсатор | 1987 |
|
SU1654577A1 |
| МНОГОФУНКЦИОНАЛЬНОЕ СЦЕПНОЕ УСТРОЙСТВО ПРИЦЕПА | 2015 |
|
RU2613140C2 |
| Гидроимпульсатор | 1989 |
|
SU1642116A1 |
| Способ возбуждения затухающих колебаний объекта и устройство для его осуществления | 1988 |
|
SU1555628A2 |

Использование: в робототехнике в качестве исполкитепьного механизма с управляемым движением Сущность изобретения: в корпусе(1)установлен образующий рабочие полости поршень (3). Поршень (3) выполнен с продольным каналом для сообщения рабочих полостей и снабжен генератором (7) механических колебаний. Механизм снабжен источником поперечного переменного магнитного поля. Рабочие полостл заполнены магнитореологической жидкостью (2). Генератор (7) снабжен мембранами (8,9), разме- щенными в полостях. Внутренняя поверхность корпуса (1) м.б выполк на рифленой. 1 з.п. ф-лы, 2 ил.
ю
/2 /3 4 376
Фиг.1
Фиг. 2
| Пьезогидравлический шаговый привод | 1986 |
|
SU1383013A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
