2.Многокомпонентный f-координатный датчик, содержащий два фланца, преобразователи деформаций, установленные на шести стержнях, соединенных концами с фланцами через сферические шарниры, отличающийс я тем, что, с целью упрощения конструкции, шарниры размещены на каждом фланце в четырех или пяти
точках, каждая точка соединена не более чем двумя стержнями.
3.Многокомпонентный С координатный датчик,содержащий: два фланца преобразователи деформаций, установленные на шести стержнях, соединенных концами с фланцами через сферические шарниры,, отличаю щи йс я тем, что, с целью упрощения конструкции, шарниры размещены на одном фланце в пяти точках, а на другом - в шести точках, каждая точка соединена не более чем двумя стержнями.
4.Многокомпонентный С-координатный датчик, содержащий два фланца,преобразователи деформаций, -установленные на шести стержнях, соединенных концами с фланцами через сферические шарниры, отличающийся тем, что, с целью упрощения конструкции, шарниры размещены на одном фланце в трех точках,
а на другом - в четырех, пяти или шести точках, каждая точка соединена не более чем двумя стержнями.
5.Многокомпонентный Р-координатный датчик, содержащий два фланца, преобразователи деформаций, ус-,
тановлённые на шести стержнях, соединенных концами с фланцами через сферические шарниры, отличающийс я тем, что, с целью упрощения конструкции, шарниры размещены на одном фланце в четьфех точкахi а на другом - в пяти или шести точках,- каждая точка соединена не более чем двумя стержнями.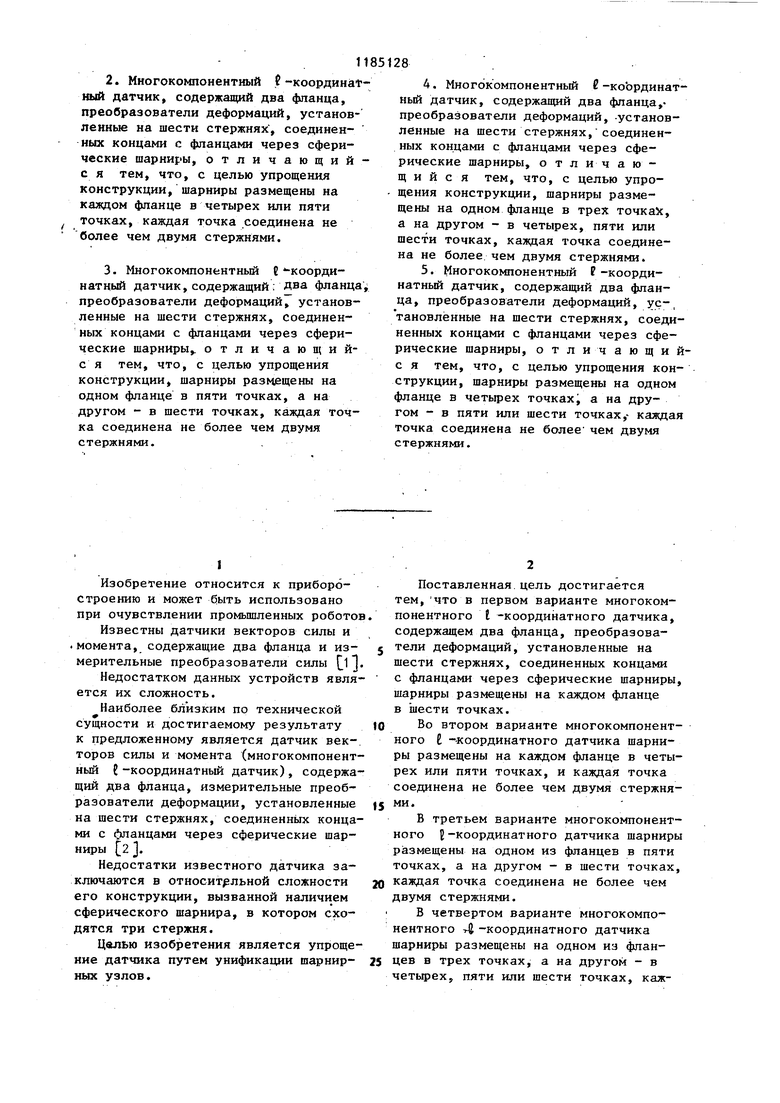
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик векторов силы и момента | 1981 |
|
SU974155A1 |
| Многокомпонентный датчик усилий и моментов | 1982 |
|
SU1045020A1 |
| Прибор для пространственного динамометрирования | 1990 |
|
SU1760394A1 |
| Многокомпонентный датчик сил и моментов | 1990 |
|
SU1747961A1 |
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА ДЛЯ ВЫПОЛНЕНИЯ МИНИМАЛЬНЫХ ИНВАЗИВНЫХ ВМЕШАТЕЛЬСТВ | 2007 |
|
RU2412800C2 |
| МЕДИЦИНСКАЯ РОБОТИЗИРОВАННАЯ СИСТЕМА | 2007 |
|
RU2412799C2 |
| Способ и устройство для испытания стрелкового оружия и/или стендовых испытаний ракетных двигателей | 2023 |
|
RU2799168C1 |
| L-координатное устройство для определения положения или перемещения объекта в пространстве | 1987 |
|
SU1519869A1 |
| Силомоментный датчик | 1984 |
|
SU1242734A1 |
| СПОСОБ И УСТРОЙСТВА ДЛЯ ИСПЫТАНИЯ СТРЕЛКОВОГО ОРУЖИЯ И/ИЛИ СТЕНДОВЫХ ИСПЫТАНИЙ РАКЕТНЫХ ДВИГАТЕЛЕЙ | 2022 |
|
RU2790353C1 |
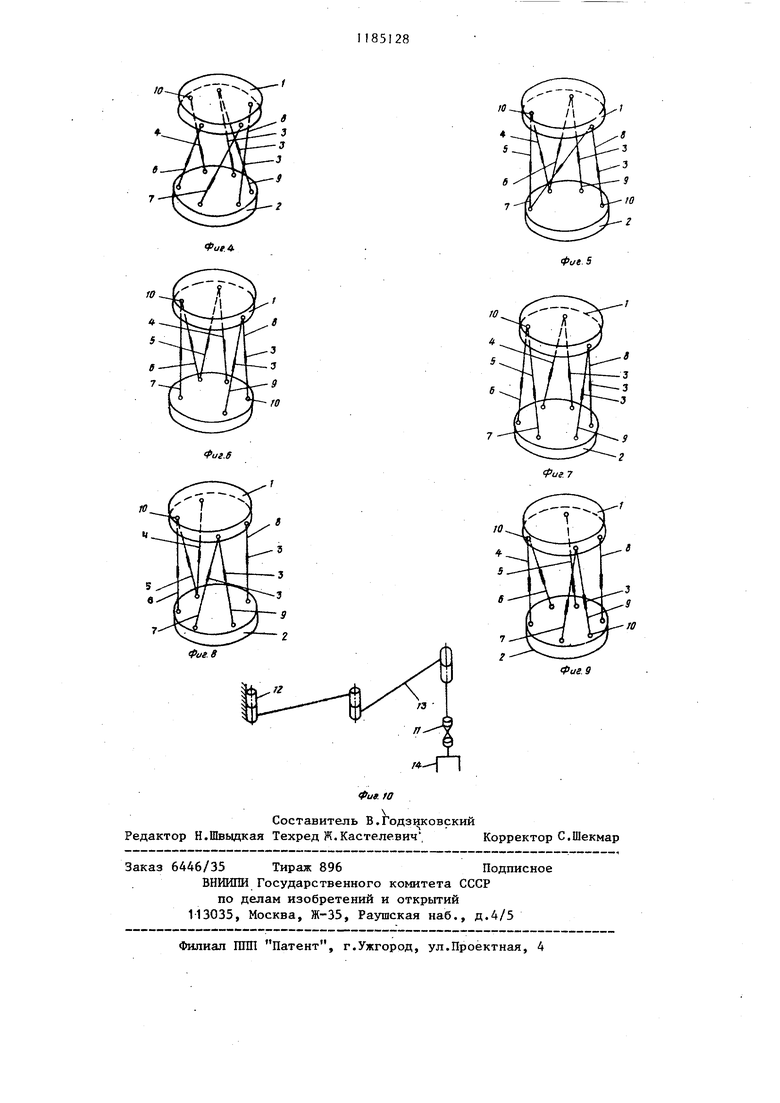
1. Многокомпонентный f-координатный датчик, содержащий два фланца, преобразователи деформаций, установленные на шести стержнях, соединенных концами с фланцами через сферические шарниры, отличающийся тем, что, с целью упрощения конструкции посредством унификации узлов, шарниры размещены на каждом фланце в шести несовпадающих точках. (Л 00 сд 00
1
Изобретение относится к приборостроению и может быть использовано при очувствлении промьш1ленных роботов
Известны датчики векторов силы и .момента, содержащие два фланца и измерительные преобразователи силы L.O
Недостатком данных устройств является их сложность.
Наиболее близким по технической сущности и достигаемому результату к предложенному является датчик век-. торов силы и момента (многокомпонентный -координатный датчик), содержащий два фланца, измерительные преобразователи деформации, установленные на шести стержнях, соединенных концами с фланцами через сферические шарниры 2 .
Недостатки известного датчика заключаются в относительной сложности его конструкции, вызванной наличием сферического шарнира, в котором сходятся три стержня.
Целью изобретения является упрощение датчика путем унификации шарнирных узлов.
Поставленная.цель достигается тем,ЧТО в первом варианте многокомпонентного i -координатного датчика, содержащем два фланца, преобразователи деформаций, установленные на шести стержнях, соединенных концами с фланцами через сферические шарниры, шарниры размещены на каждом фланце в шести точках.
Во втором варианте многокомпонентного -Координатного датчика шарниры размещены на каждом фланце в четырех или пяти точках, и каждая точка соединена не более чем двумя стержнями.
В третьем варианте многокомпонентного 2-координатного датчика шарниры размещены на одном из фланцев в пяти точках, а на другом - в шести точках, каждая точка соединена не более чем двумя стержнями.
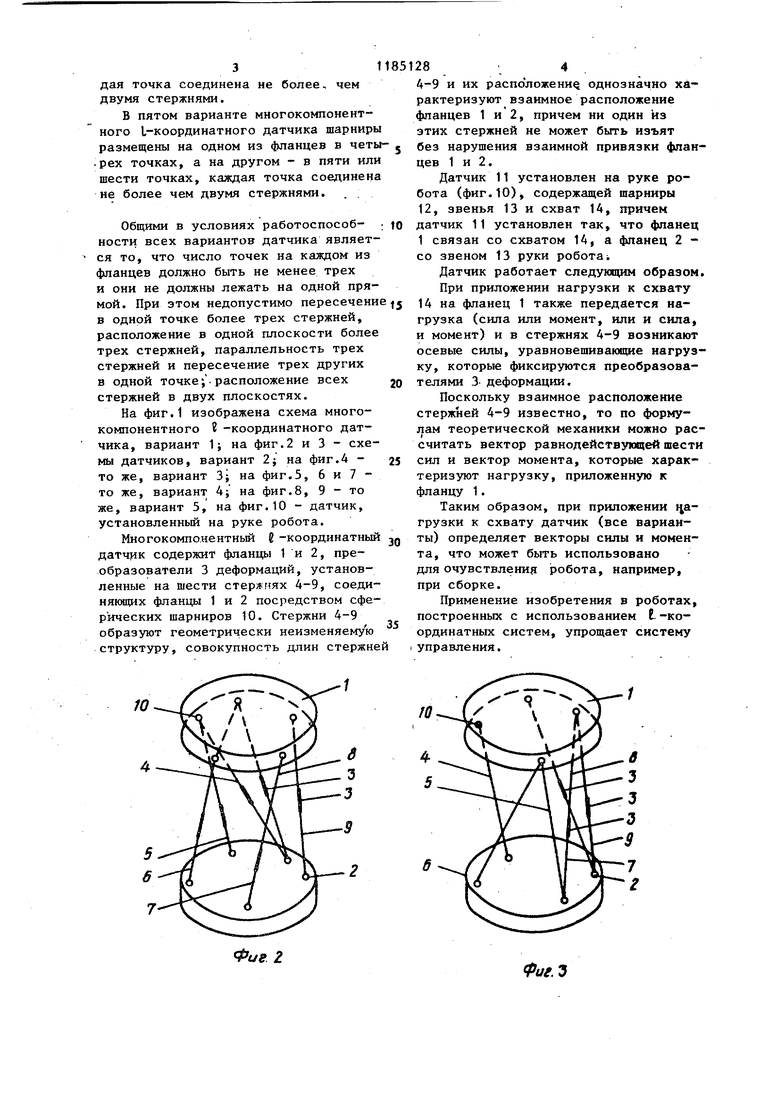
В четвертом варианте многокомпонентного -4 -координатного датчика шарниры размещены на одном из фланцев в трех точках, а на другом - в четырех, пяти или шести точках, каждал точка соединена не более, чем двумя стержнями. В пятом варианте многокомпонентного L-координатного датчика шарнир размещены на одном из фланцев в чет .рех точках, а на другом - в пяти ил шести точках, каждая точка соединен не более чем двумя стержнями. Общими в условиях работоспособности всех вариантов датчика является то, что число точек на каждом из фланцев должно быть не менее трех и они не должны лежать на одной прямой. При этом недопустимо пересечени в одной точке более трех стержней, расположение в одной плоскости более трех стержней, параллельность трех стержней и пересечение трех других в одной точке;.расположение всех стержней в двух плоскостях. На фиг.1 изображена схема многокомпонентного 2 -координатного датчика, вариант 1; на фиг.2 и 3 - схемы датчиков, вариант 2; на фиг.4 то же, вариант 3} на фиг.5, 6 и 7 то же, вариант 4; на фиг.8, 9 - то же, вариант 5, на фиг.10 - датчик, установленный на руке робота. Многокомпонентный 8-координатный датчик содержит фланцы 1 и 2, преобразователи 3 деформаций, установленные на шести стержнях 4-9, соединяющих фланцы 1 и 2 посредством сферических шарниров 10. Стержни 4-9 образуют геометрически неизменяемую структуру, совокупность длин стержне 4-9 и их расположение однозначно характеризуют взаимное расположение фланцев 1 и 2, причем ни один из этих стержней не может быть изъят без нарушения взаимной привязки фланцев 1 и 2. Датчик 11 установлен на руке робота (фиг.10), содержащей шарниры 12, звенья 13 и схват 14, причем датчик 11 установлен так, что фланец 1 связан со схватом 14, а фланец 2 со звеном 13 руки роботаi Датчик работает следующим образом. При приложении нагрузки к охвату 14 на фланец 1 также передается нагрузка (сила или момент, или и сила, и момент) и в стержнях 4-9 возникают осевые силы, уравновешивающие нагрузку, которые фиксируются преобразователями 3- деформации. Поскольку взаимное расположение стержней 4-9 известно, то по формулам теоретической механики можно рассчитать вектор равнодействующей шести сил и вектор момента, которые характеризуют нагрузку, приложенную к фланцу 1. Таким образом, при приложении цагрузки к схвату датчик (все варианты) определяет векторы силы и момента, что может быть использовано для очувствления робота, например, при сборке. Применение изобретения в роботах, построенных с использованием Е- -координатных систем, упрощает систему управления.
Фие 2
Фие.Ъ
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Колискор А.Ш.- Станки и инструмент, 1982, № 12, с | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР ,№ 974155, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
