Изобретение относится к авиационной технике, в частности к области грузовых управляемых парашютных систем, и может быть использовано в системах с парашютным крылом и с другими типами гибких крыльев.
Известна система управления парашютом-крылом, представляющая собой левую и правую фалы управления, которые присоединены верхним концом через уздечки к задней кромке крыла на левой и правой его половине.
В полете при подтяге одной фалы управления (рулевой машинкой или вручную) происходит отклонение вниз задней кромки на одной половине крыла и, как следствие, увеличение углов атаки на этой половине, что приводит к появлению сил и моментов, разворачивающих крыло в сторону подтянутой кромки.
Недостатками этого технического решения являются большие усилия (3-5% от массы системы "груз-парашют"), которые необходимо прилагать к фалу управления для увеличения угла атаки крыла, а также некоторое снижение аэродинамического качества крыла из-за искривления формы его аэродинамического профиля при отклонении вниз задней кромки.
Наиболее близким по технической сущности к предлагаемому является устройство регулирования в полете угла атаки несущей поверхности, представляющее собой несущую поверхность со стропами, связанными в пучок, и рычагами управления (левым и правым), прикрепленным к стропам между крылом и нижним узлом пучка строп.
Управление углом атаки парашюта-крыла осуществляется поворотом рычагов, что приводит к изменению углов атаки сечений крыла. При этом за счет подобия шагов закрепления строп к нервюрам крыла и к рычагу, поворот сечений крыла при изменении угла атаки происходит практически без искажения формы аэродинамического профиля сечений крыла.
Недостатками прототипа являются большие усилия, которые необходимо прилагать к рычагам управления, потому что поворот крыла происходит относительно точки крепления верхнего конца передней стропы к крылу, т. е. относительно передней кромки при увеличении угла атаки и относительно задней кромки крыла при уменьшении угла атаки, а так как результирующая аэродинамическая сила крыла расположена между его передней и задней кромками, то и момент этой силы относительно осей поворота крыла в обоих случаях имеет большие значения.
Цель изобретения - снижение энергозатрат на управление угла атаки парашюта-крыла.
Это достигается тем, что в гибком парашюте-крыле с системой управления углами атаки, включающем собственно крыло, набор строп и рычаги управления, рычаги управления выполнены двуплечими с осью поворота, перпендикулярной плоскости симметрии парашютной системы в ее исходном состоянии. При этом ось поворота пересекается линией действия результирующей аэродинамической силы парашюта-крыла, лежащей в плоскости симметрии парашюта-крыла и проходящей через центр тяжести подвешенного к парашютной системе груза, чем и обеспечиваются малые потребные моменты для поворота сечений парашюта-крыла при управлении угла атаки и соответственно малые энергозатраты на управление парашютной системой.
На чертеже представлена схема действия системы управления углом атаки парашютной системы.
Парашютная система включает собственно планирующий купол 1, набор строк 2 и два (левый и правый) двуплечих рычага 3 (на схеме изображен один рычаг и одна нервюра крыла). При этом стропы 2, соединенные в пучки, верхними концами крепятся к нервюрам планирующего купола 1, а нижними - к рычагу 4 управления (пучки строп левой половины купола - к левому рычагу, правой половины купола - к правому рычагу). Ось 5 поворота рычагов перпендикулярна плоскости симметрии парашютной системы и конструктивно соединена с подвесной системой 6 груза 7. Благодаря этому ось 5 пересекается с линией 8 действия равнодействующей аэродинамической силы планирующего купола, лежащей в плоскости симметрии и проходящей через центр тяжести подвешенного груза 7.
Наличие двух рычагов 3 обусловлено необходимостью как симметричного, так и несимметричного управления углами атаки сечений левой и правой половин купола 1.
При одновременном повороте обоих рычагов в одном направлении и на одинаковый угол обеспечивается симметричное изменение углов атаки α сечений левой и правой половины купола (управление углом планирования системы в прямолинейном полете).
При повороте только одного рычага на определенный угол или обоих, но в разных направлениях обеспечивается несимметричное изменение углов атаки α сечений левой и правой половин купола (управление курсом парашютной системы). (56) Журнал "Крылья Родины", N 5, 1978, ст. "Парашют ПО-9" сер. 2, с. 31-34.
Заявка Франции N 2610895, кл. В 64 D 17/24, 1988.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕНЕНИЯ АЭРОДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ПЛАНИРУЮЩЕГО ПАРАШЮТА | 1996 |
|
RU2128603C1 |
| ПЛАНИРУЮЩИЙ ПАРАШЮТ | 1996 |
|
RU2094324C1 |
| ПЛАНИРУЮЩИЙ ПАРАШЮТ | 2023 |
|
RU2805337C1 |
| ВРАЩАЮЩИЙСЯ ИЛИ ПЛАНИРУЮЩИЙ ПАРАШЮТ (ВАРИАНТЫ) | 2013 |
|
RU2534683C1 |
| Устройство для измерения аэродинамических характеристик планирующего парашюта в аэродинамической трубе, модель планирующего парашюта для испытаний в аэродинамической трубе, способ измерения аэродинамических характеристик планирующего парашюта в аэродинамической трубе | 2017 |
|
RU2655713C1 |
| ПЛАНИРУЮЩИЙ ПАРАШЮТ | 1990 |
|
RU1785184C |
| Многокупольная крыльевая система | 2020 |
|
RU2770501C2 |
| Устройство для измерения распределения давления на куполе парашюта | 2021 |
|
RU2767022C1 |
| ПЛАНИРУЮЩИЙ ПАРАШЮТ | 1989 |
|
SU1744883A1 |
| ПАРАШЮТНАЯ СИСТЕМА | 1988 |
|
RU1775996C |
Изобретение относится к авиационной технике, в частности к области грузовых управляемых парашютных систем, и может быть использовано в системах с парашютным крылом и с другими типами гибких крыльев. Целью изобретения является снижение энергозатрат на управление парашютной системы. Парашютная система включает планирующий купол 1, набор строп 2 и два (левый и правый) двуплечих рычага 3. При этом стропы 2, соединенные в пучки, верхними концами крепятся к нервюрам планирующего купола 1, а нижними - к рычагу 4 управления (пучки строп левой половины купола - к левому рычагу, правой половины купола - к правому рычагу). Ось 5 поворота рычагов 4 перпендикулярна плоскости симметрии парашютной системы и конструктивно соединена с подвесной системой 6 груза 7. Благодаря этому ось 4 пересекается с линией 7 действия равнодействующей аэродинамической силы планирующего купола, лежащей в плоскости симметрии системы и проходящей через центр тяжести подвешенного груза. Наличие двух рычагов 3 обусловлено необходимостью как симметричного, так и несимметричного управления углами атаки сечений левой и правой половин купола 1. 1 ил.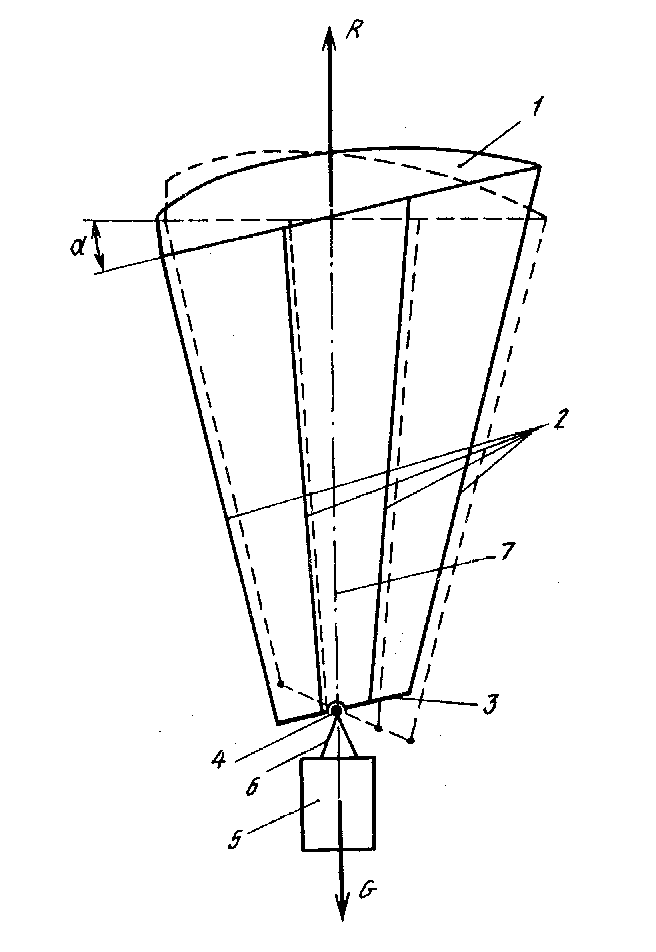
ПАРАШЮТНАЯ СИСТЕМА, содержащая планирующий купол со стропами, соединенными в пучки, закрепленные на рычагах управления, отличающаяся тем, что, с целью снижения энергозатрат на управление парашютной системой, рычаги управления выполнены двуплечими и их ось поворота перпендикулярна плоскости симметрии парашютной системы.
