А
j
Изобретение относится к машиностроению.
Цель изобретения - повышение экономичности инерционного трансформатора вращающего момента путем обеспечения его блокировки при снижении частоты вращения входного вала в режиме муфты.
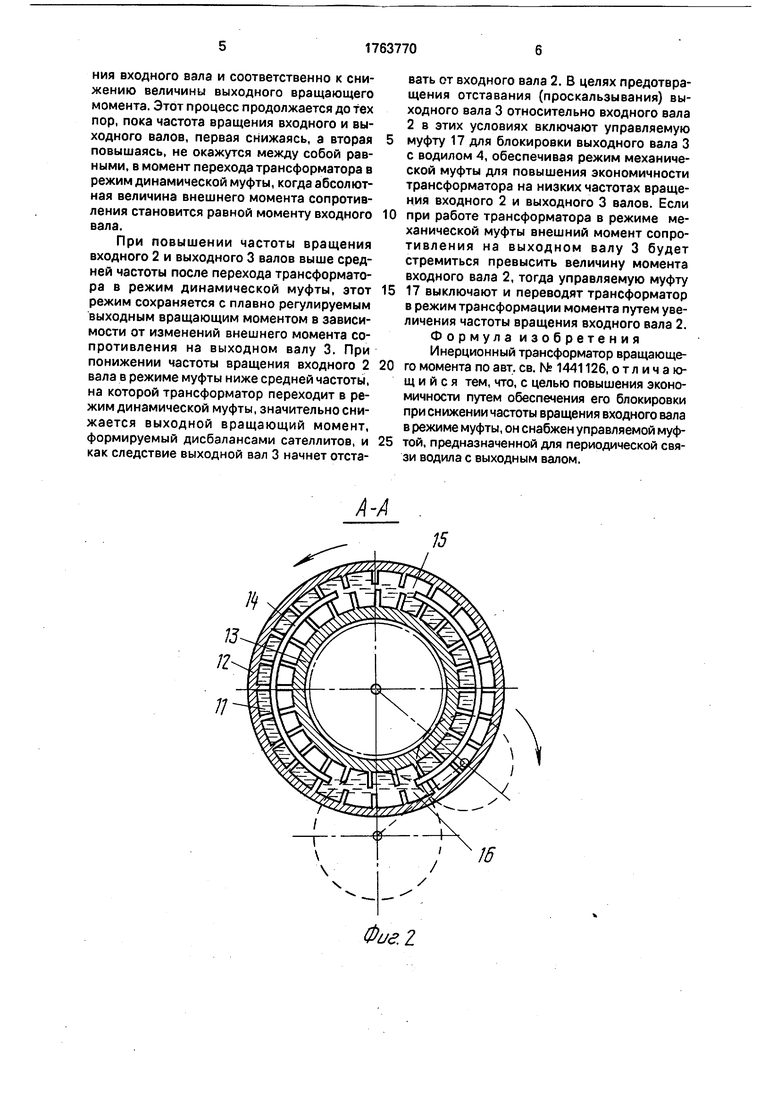
На фиг. 1 схематично изображен инерционный трансформатор вращающего момента; на фиг. 2 - сечение А-А на фиг. 1.
Инерционный трансформатор содержит корпус 1, размещенные в нем входной 2 и выходной 3 валы и два планетарных механизма с общим для них водилом 4, соединенным с входным валом 2. Каждый пла- нетарный механизм включает соответственно центральные колеса 5 и 6, промежуточные сателлиты 7 и 8, взаимодействующие с ними неуравновешенные сателлиты 9 и 10 с жидкими грузами 11. При этом неуравновешенные сателлиты 9 и 10, принадлежащие разным планетарным механизмам, установлены на водиле 4 соосно парами. Центральное колесо 5 первого планетарного механизма связано с выходным валов 3, а центральное колесо 6 второго планетарного механизма - с корпусом 1, Грузовое звено каждой пары неуравновешенных сателлитов 9 и 10 выполнено в виде заполненной жидким грузом 11 герметичной камеры, которая образована коаксиаль- но установленными на водиле 4 и связанными с соответствующими сателлитами наружным 12 и внутренним 13 барабанами соответственно с внутренними лопастями в первом планетарном механизме и наружными лопастями во втором, предназначенными для взаимодействия с грузами 11. Лопасти барабанов 12 и 13 разделены друг от друга цилиндрической гильзой 14, закрепленной на водиле 4 и имеющей два перепускных окна 15 и 16, предназначенные для сообщения между полостями наружного 12 и внутреннего 13 барабанов и расположенные диаметрально противоположно по линии центров неуравновешенного сателлита и водила. Предлагаемый трансформатор снабжен управляемой муфтой 17, предназначенной для обеспечения периодической связи в нужное время между водилом и выходным валом.
Инерционный трансформатор работает следующим образом.
При вращении входного вала 2 с водилом 4 и наличии момента сопротивления на выходном валу 3 промежуточные сателлиты 7 и 8 будут обкатывать соответственно центральные колеса 5 и 6 и приводить в движение неуравновешенные сателлиты 9 с наружными барабанами 12 и неуравновешенные сателлиты 10 с внутренними барабанами 13, а жидкие грузы будут перемещаться по окружности лопастями наружных барабанов 12 к центру трансформатора, а 5 лопастями внутренних барабанов 13 - к его периферии, каждый раз перетекая под действием центробежных сил через окна 15 и 16 гильз 14 из лопастей одних барабанов в лопасти других при проходе ими верхних и
0 нижних положений. При этом грузы, находящиеся на лопастях наружных барабанов 12, создают дисбалансы неуравновешенных сателлитов 9, которыми формируется на центральном колесе 5 положительный момент,
5 вращающий выходной вал 3, а на водиле 4 - момент сопротивления, а грузы, находящиеся на лопастях внутренних барабанов 13, создают дисбалансы неуравновешенных сателлитов 10, которыми формируется на цен0 тральном колесе 6 отрицательный реактивный момент, воспринимаемый корпусом 1, а на водиле 4 - положительный момент, используемый вместе с моментом входного вала на преодоление момента со5 противления, действующего на водиле, абсолютная величина которого равна выходному моменту.
Инерционный трансформатор наиболее эффективно работает с применением его в
0 сочетании с двигателем (не показан), имеющим регулируемую частоту вращения вала, например с двигателем внутреннего сгорания, не вызывая его перегрузок при переходах трансформатора из одного режима в
5 другой. Так при работе трансформатора в стоповом режиме (при неподвижном выходном вале 3 и центральном колесе 5), когда циркуляция грузов между барабанами 12 и 13 самая интенсивная и дисбалансы сател0 литов 9 и 10 имеют наибольшую величину, частоту вращения входного вала (вала двигателя) повышают до максимальной, увеличивая угловую скорость грузов и соответственно формируя максимальные
5 величины выходного и реактивного моментов.
Когда под действием вращающего момента выходной вал 3 начинает движение, то по мере роста его скорости вращения и
0 соответствующего снижения на нем внешнего момента сопротивления, циркуляция грузов между барабанами 12 и 13 уменьшается, снижая дисбалансы сателлитов 10 и соответственно уменьшая реактивный мо5 мент, и поскольку с ростом скорости выходного вала 3 дисбалансы сателлитов 9 не изменяются, а реактивный момент уменьшается, то момент сопротивления на входном валу 2 будет стремиться к увеличению,
что приводит к уменьшению частоты вращения входного вала и соответственно к снижению величины выходного вращающего момента. Этот процесс продолжается до тех пор, пока частота вращения входного и выходного валов, первая снижаясь, а вторая повышаясь, не окажутся между собой равными, в момент перехода трансформатора в режим динамической муфты, когда абсолютная величина внешнего момента сопротивления становится равной моменту входного вала.
При повышении частоты вращения входного 2 и выходного 3 валов выше средней частоты после перехода трансформатора в режим динамической муфты, этот режим сохраняется с плавно регулируемым выходным вращающим моментом в зависимости от изменений внешнего момента сопротивления на выходном валу 3. При понижении частоты вращения входного 2 вала в режиме муфты ниже средней частоты, на которой трансформатор переходит в режим динамической муфты, значительно снижается выходной вращающий момент, формируемый дисбалансами сателлитов, и как следствие выходной вал 3 начнет отставать от входного вала 2. В целях предотвращения отставания (проскальзывания) выходного вала 3 относительно входного вала 2 в этих условиях включают управляемую муфту 17 для блокировки выходного вала 3 с водилом 4, обеспечивая режим механической муфты для повышения экономичности трансформатора на низких частотах вращения входного 2 и выходного 3 валов. Если при работе трансформатора в режиме механической муфты внешний момент сопротивления на выходном валу 3 будет стремиться превысить величину момента входного вала 2, тогда управляемую муфту 17 выключают и переводят трансформатор в режим трансформации момента путем увеличения частоты вращения входного вала 2. Формула изобретения Инерционный трансформатор вращающего момента по авт. св. № 1441126, о т л и ч а ю- щ и и с я тем, что, с целью повышения экономичности путем обеспечения его блокировки при снижении частоты вращения входного вала в режиме муфты, он снабжен управляемой муфтой, предназначенной для периодической связи водила с выходным валом.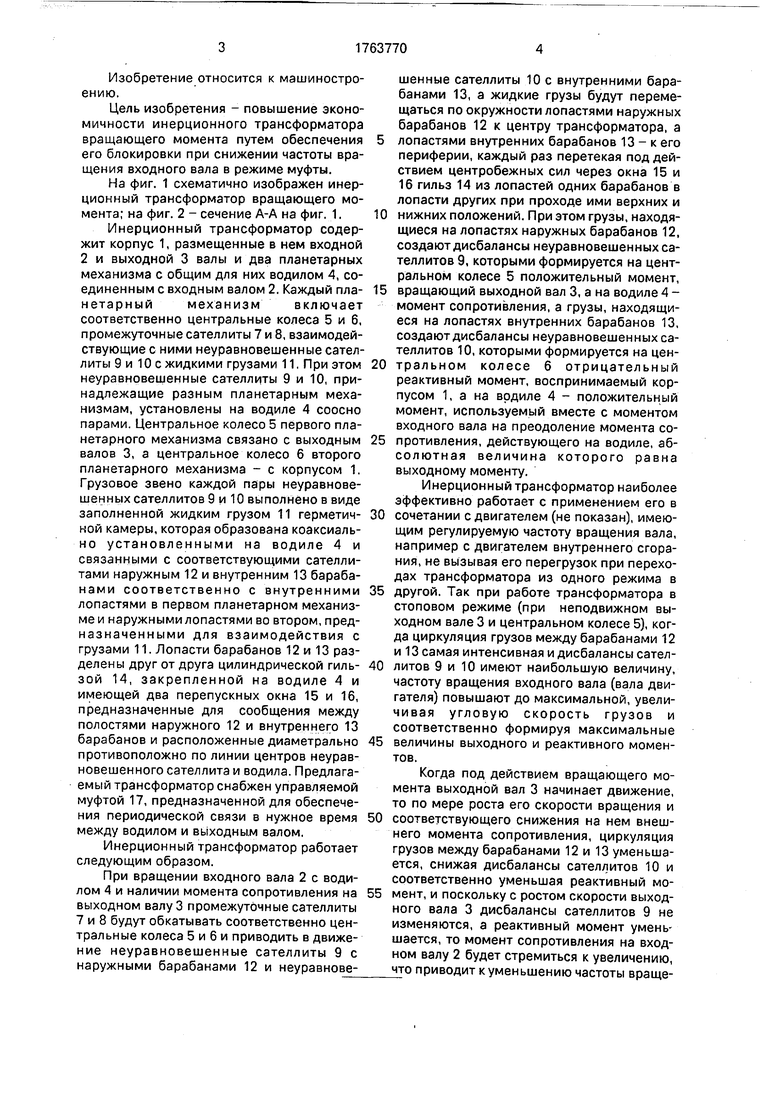
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидроинерционный трансформатор вращающего момента | 1991 |
|
SU1786301A1 |
| Инерционный трансформатор | 1989 |
|
SU1679099A2 |
| Гидроинерционный трансформатор | 1990 |
|
SU1744350A1 |
| Инерционный трансформатор вращающего момента | 1988 |
|
SU1626029A2 |
| Инерционный трансформатор вращающего момента | 1987 |
|
SU1441126A1 |
| Гидроинерционный трансформатор вращающего момента | 1989 |
|
SU1703897A1 |
| Гидроинерционный трансформатор вращающего момента | 1989 |
|
SU1726877A1 |
| Гидроинерционный трансформатор вращающего момента | 1989 |
|
SU1703898A1 |
| Гидроинерционный трансформатор | 1991 |
|
SU1810686A1 |
| Инерционный трансформатор | 1991 |
|
SU1825927A1 |
Использование: машиностроение. Сущность изобретения: инерционный трансформатор вращающего момента содержит два планетарных механизма с общим води- лом, неуравновешенными сателлитами и концентрично расположенными барабанами. При вращении установленного на входном валу 2 водила 4 наружные и внутренние барабаны 12 и 13 с жидким грузом, соединенные с сателлитами 9 и 10, осуществляют планетарное движение, создавая дисбалансы на сателлитах 9 и 10, которыми формируется на центральном колесе 5 одного планетарного механизма, положительный момент, вращающий выходной вал 3, а на центральном колесе 6 другого планетарного механизма - отрицательный реактивный момент, воспринимаемый корпусом. После перехода трансформатора из режима трансформации момента в режим муфты он блокируется средством управляемой муфты 17, связывающей выходной вал 3 с водилом 4. 2 ил.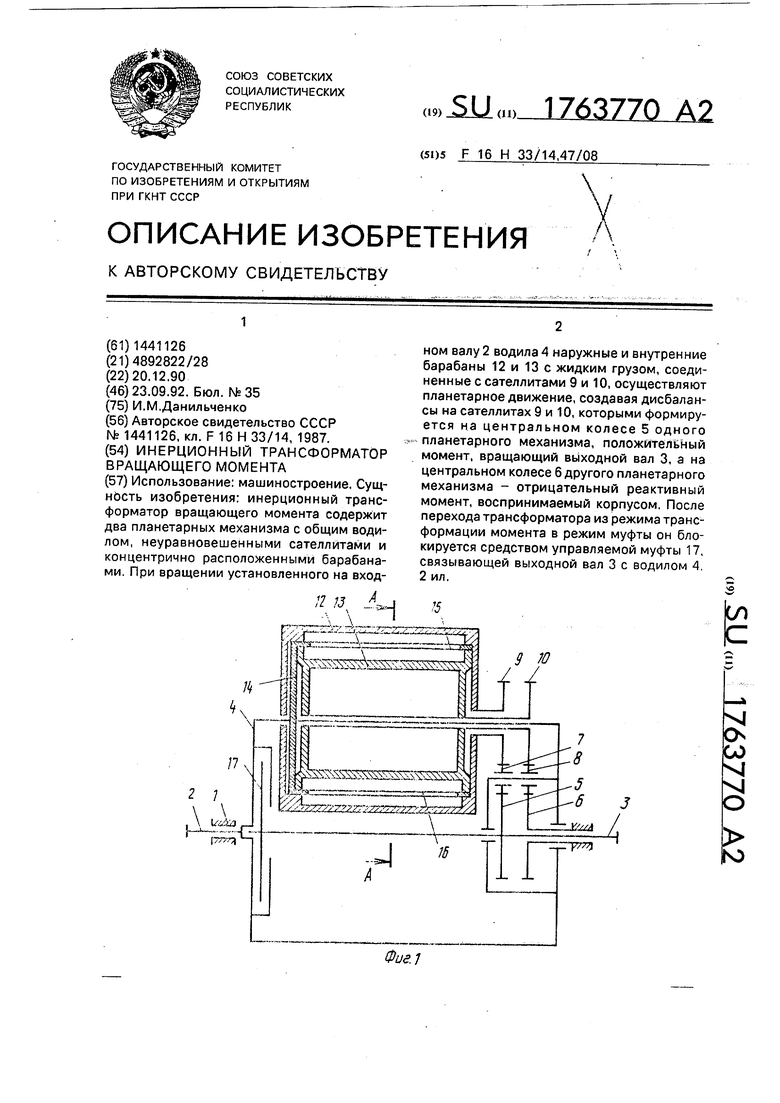
| Инерционный трансформатор вращающего момента | 1987 |
|
SU1441126A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
