Изобретенное относится к машиностроению и может быть использовано в приводах машин, обладающих большой инерционностью рабочих органов, преимущественно в трансмиссии быстроходных наземных транспортных средств.
Цель изобретения - повышение экономичности и долговечности гидроинерционноготрансформатора путем принудительного регулирования дисбаланса неуравновешенных сателлитов.
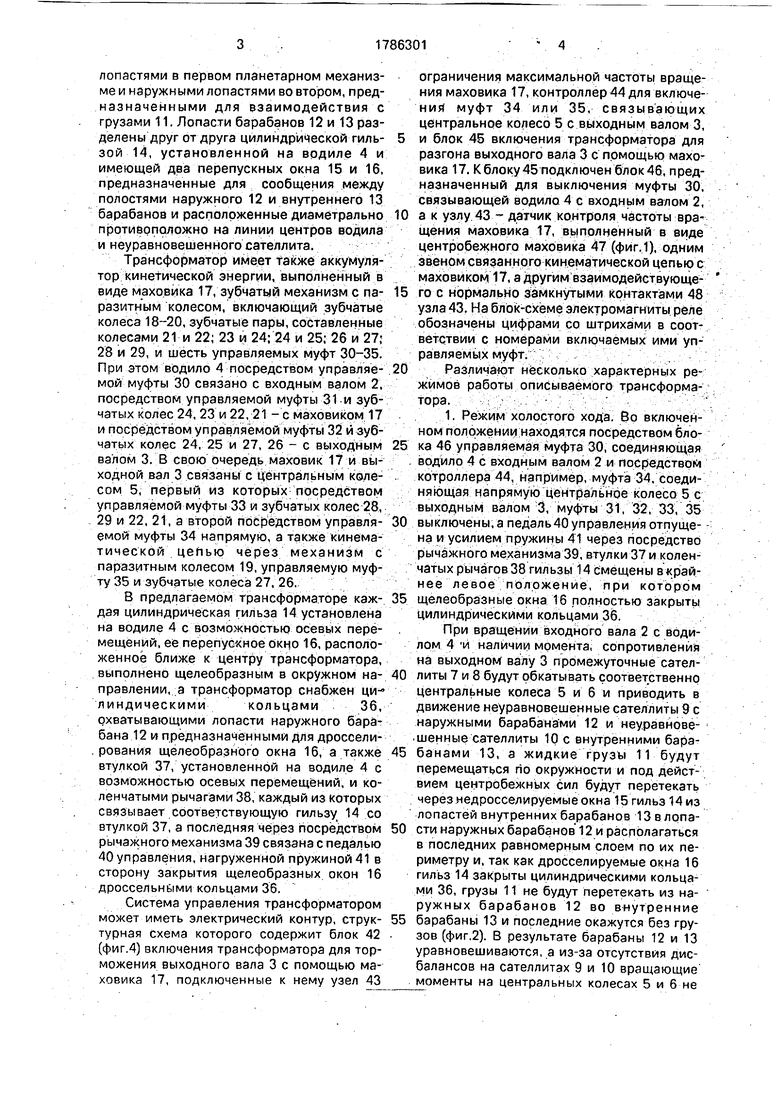
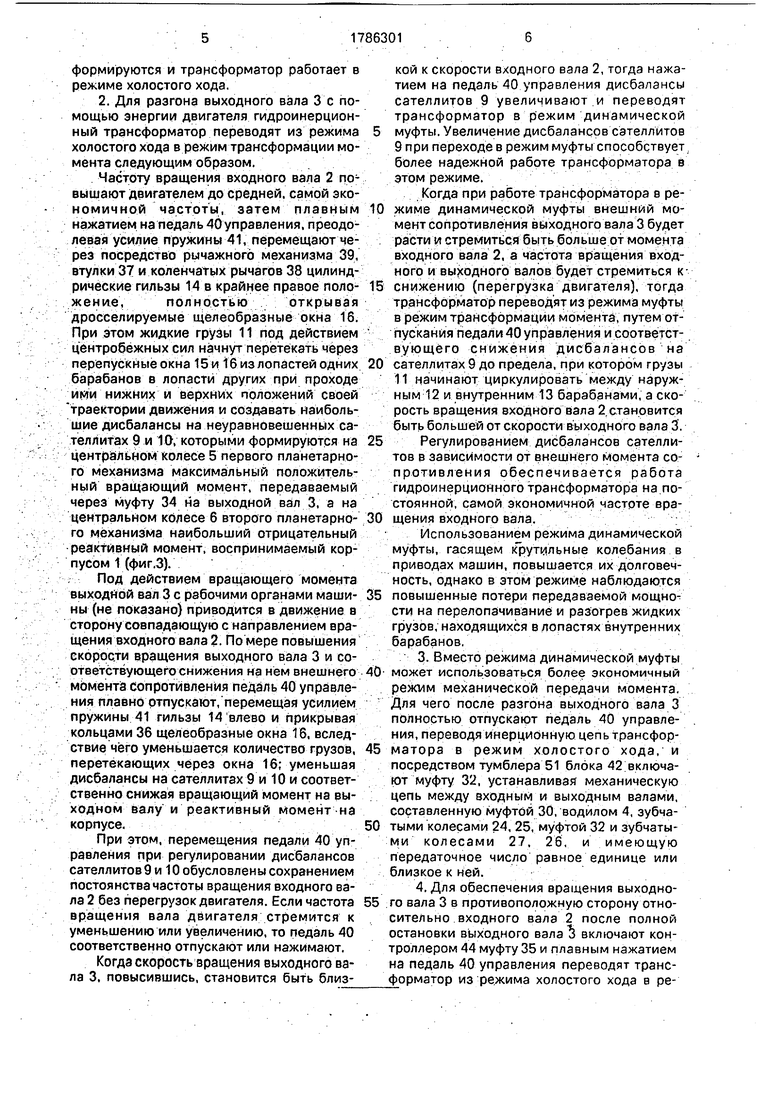
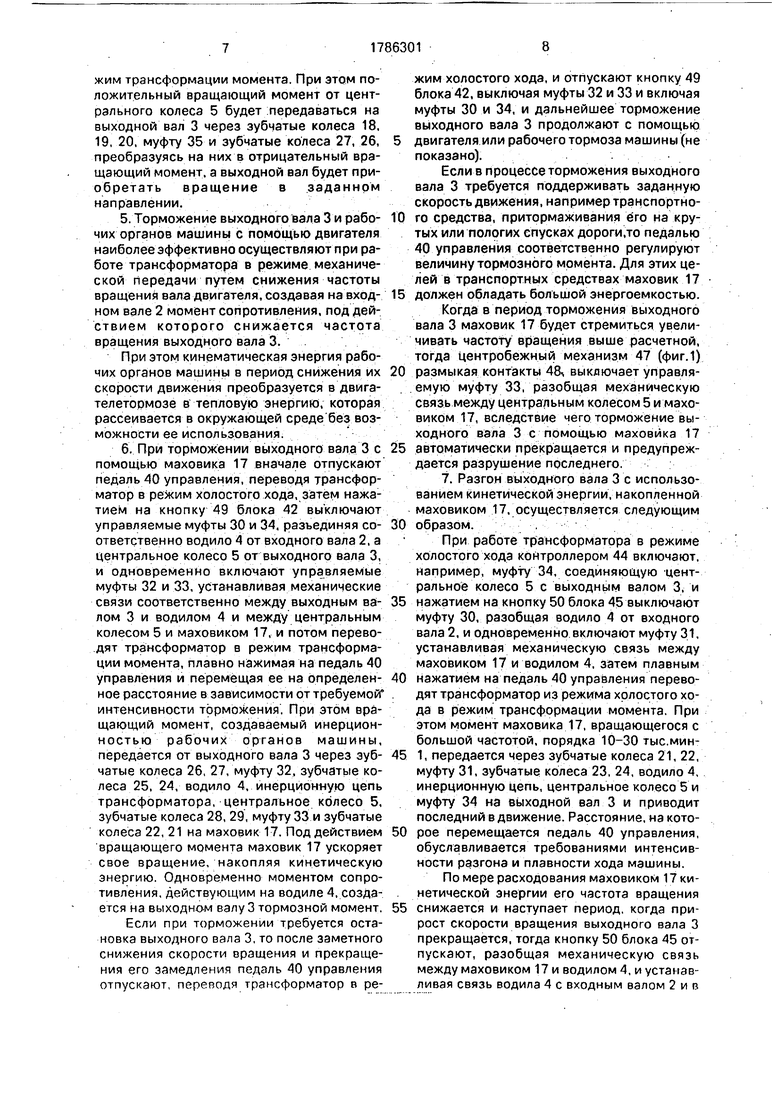
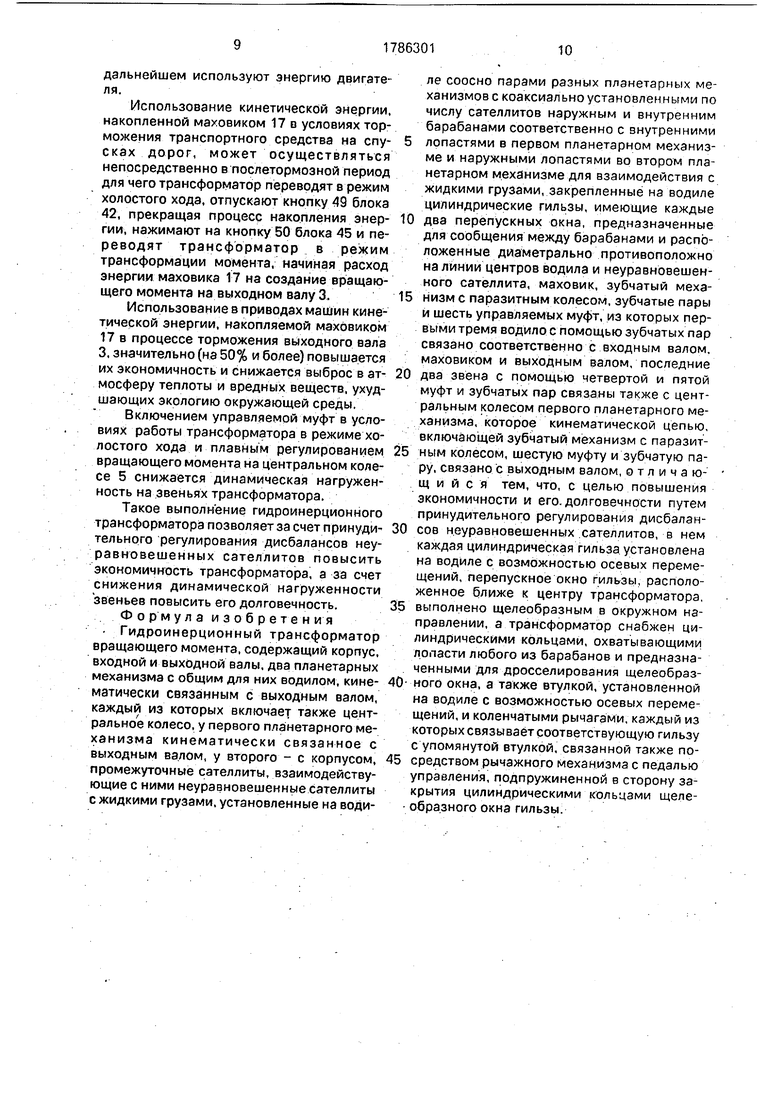
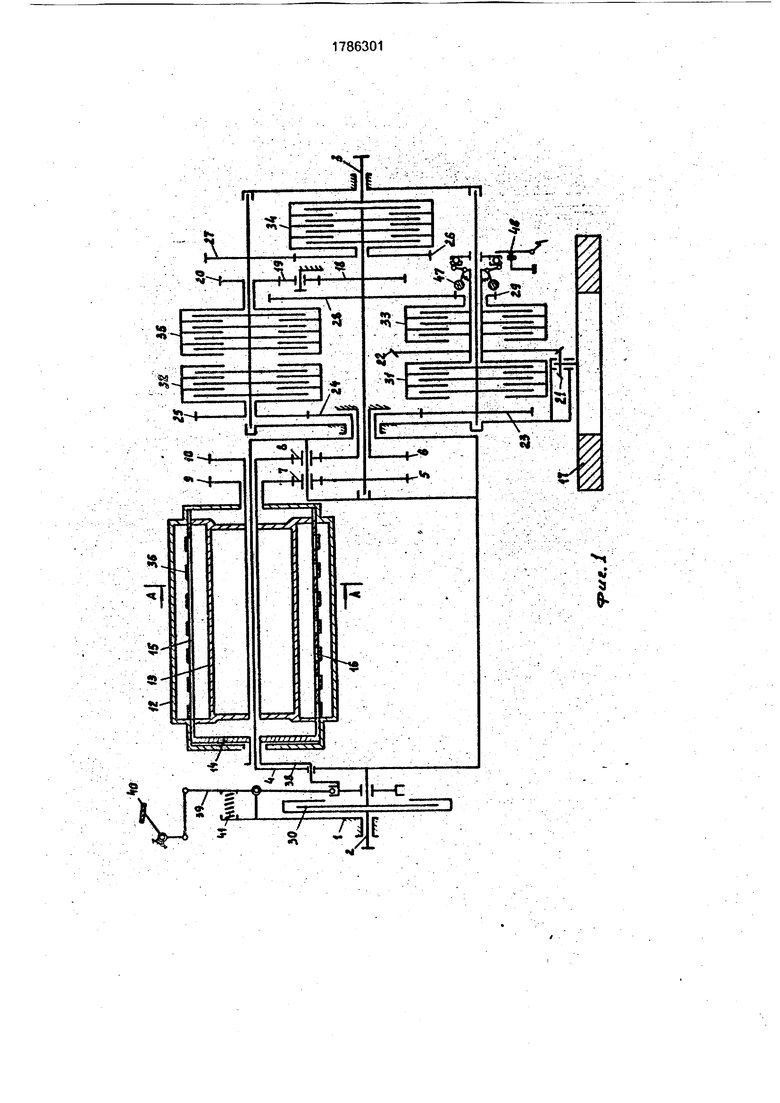
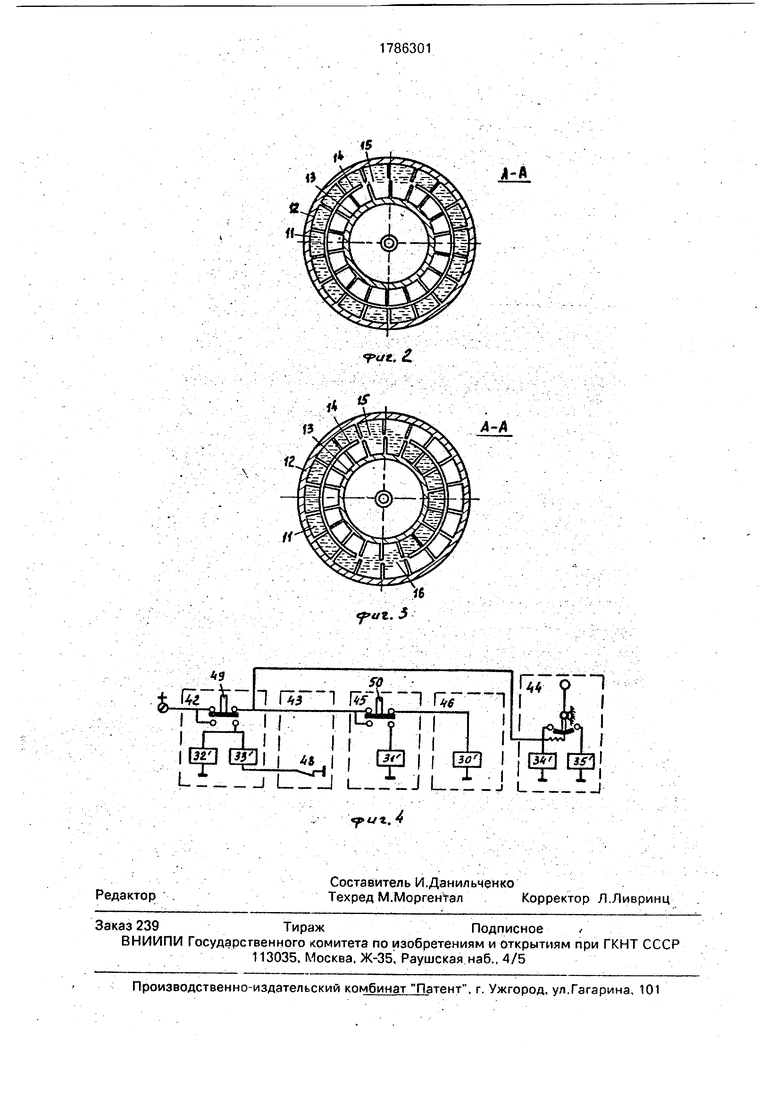
На фиг.1 изображен схематично гидроинерционный трансформатор вращающего момента; на фиг.2 и 3 - сечение по А-А фиг. 1 с расположением жидкого груза в барабанах соответственно на режимах холостого хода и полной нагрузки; на фиг.4-структур- ная схема электрического контура системы управления трансформатором.
Гидроинерционный трансформатор вращающего содержит корпус 1, размещенные в нем входной 2 и выходной 3 валы, два планетарных механизма с общим
для них водилом 4, кинематически связанным с входным валом 2. Планетарные механизмы включают соответственно центральные колеса 5 и 6, сцепленные с ними промежуточные сателлиты 7 и 8, взаимодействующие с последними неравнове- шенные сателлиты 9 и 10 с жидкими грузами 11. Центральное колесо 5 первого планетарного механизма кинематической цепью связано с выходным валом 3, а центральное колесо 6 второго планетарного механизма связано с корпусом 1. Неуравновешенные сателлиты 9 и 10 установлены на водиле 4 соосно парами, принадлежащими в каждой паре разными планетарным механизмам. Грузовое звено каждой пары неуравновешенных сателлитов 9, 10 выполнено в виде заполненной жидким грузом 11 герметичной камеры, которая образована коэксиэль- но установленными на водиле 4 и связанными с соответствующими сателлитами наружным 12 и внутренним 13 барабанами соответственно с внутренними
-г
Ј
XI
00 О 00 О
лопастями в первом планетарном механизме и наружными лопастями во втором, пред- назначенными для взаимодействия с грузами 11. Лопасти барабанов 12 и 13 разделены друг от друга цилиндрической гильзой 14, установленной на врдиле 4 и имеющей два перепускных окна 15 и 16, предназначенные для сообщения между полостями наружного 12 и внутреннего 13 барабанов и расположенные диаметрально противоположно на линии центров водила и неуравновешенного сателлита.
Трансформатор имеет также аккумулятор кинетической энергии, выполненный в виде маховика 17, зубчатый механизм с паразитным колесом, включающий зубчатые колеса 18-20, зубчатые пары, составленные колесами 21 и 22; 23 и 24; 24 и 25; 26 и 27;
28 и 29, и шесть управляемых муфт 30-35. При этом водило 4 посредством управляемой муфты 30 связано с входным валом 2, посредством управляемой муфты 31 и зубчатых колес 24, 23 и 22, 21 - с маховиком 17 и посредством управляемой муфты 32 и зубчатых колес 24, 25 и 27, 2.6 - с выходным валом З..В свою очередь маховик 17 и выходной вал 3 связаны с центральным колесом 5, первый из которых посредством управляемой муфты 33 и зубчатых колес 28,
29 и 22, 21, а второй побредством управляемой муфты 34 напрямую, а также кинематической цепью через механизм с паразитным колесом 19, управляемую муфту 35 и зубчатые колеса 27, 26.
В предлагаемом трансформаторе каждая цилиндрическая гильза 14 установлена на водиле 4 с возможностью осевых перемещений, ее перепускное окно 16, расположенное ближе к центру трансформатора, выполнено щелеобразным в окружном направлении, а трансформатор снабжен ци- линдическимикольцами 36, охватывающими лопасти наружного барабана 12 и предназначенными для дроссели- .рования щелеобразного окна 16, а также втулкой 37, установленной на водиле 4 с возможностью осевых перемещений, и коленчатыми рычагами 38, каждый из которых связывает соответствующую гильзу 14 со втулкой 37, а последняя через посредством рычажного механизма 39 связана с педалью 40 управления, нагруженной пружиной 41 в сторону закрытия щелеобразных окон 16 дроссельными кольцами 36.
Система управления трансформатором может иметь электрический контур, структурная схема которого содержит блок 42 (фиг.4) включения трансформатора для торможения выходного вала 3 с помощью маховика 17, подключенные к нему узел 43
ограничения максимальной частоты вращения маховика 17, контроллер 44 для включений муфт 34 или 35, связывающих центральное колесо 5 с выходным валом 3,
5 и блок 45 включения трансформатора для разгона выходного вала 3 с помощью маховика 17. К блоку45 подключенблок46, предназначенный для выключения муфты 30, Связывающей водило 4 с входным валом 2,
0 а к узлу 43 - датчик контроля частоты вращения маховика 17, выполненный в виде центробежного маховика 47 (фйг,1), одним звеном связанного кинематической цепью с маховиком 17, а другим взаимодейетвующе5 то с нормально замкнутыми контактами 48 узла 43. На блок-схеме электромагниты реле обозначены цифрами со штрихами в соответствии с номерами включаемых ими управляемых муфт.
0 Различают несколько характерных режимов работы описываемого трансФорма. ТОра. ... у; ; ;) ; . ; . -. - .Y
1. Режим холостого хода. Во включенном положении;находятся посредством бло5 ка 46 управляемая муфта 30, соединяющая . водило 4 с входным валом 2 и посредством
. котроллера 44, например, муфта 34, соединяющая напрямую центральное колесо 5 с выходным валом 3, муфты 31, 32, 33, 35
0 выключены, а педаль40 управления отпуще- - на и усилием пружины 41 через посредство рычажного механизма 39, втулки 37 и коленчатых рычагов 38 гильзы 14 смещены в крайнее левое положение, при котором
5 щелеобразные окна 16 полностью закрыты цилиндрическими кольцами 36.
При вращении входного вала 2 с води- лом 4 и наличии момента, сопротивления на выходном валу 3 промежуточные сател0 литы 7 и 8 будут обкатывать соответственно центральные колеса 5 и 6 и приводить в движение неуравновешенные сателлиты 9 с наружными барабанами 12 и неуравнове- шенные сателлиты 10 с внутренними бара45 банами 13, а жидкие грузы 11 будут перемещаться по окружности и под действием центробежных сил будут перетекать через недросселируёмые окна 15 гильз 14 из лопастей внутренних барабанов 13 в лопа50 сти наружных барабанов 12 и располагаться в последних равномерным слоем по их периметру и. так как дросселируемые окна 16 гильз 14 закрыты цилиндрическими кольцами 36, грузы 11 не будут перетекать из наружных барабанов 12 во внутренние
55 барабаны 13 и последние окажутся без грузов (фиг,2). В результате барабаны 12 и 13 уравновешиваются, а из-за отсутствия дисбалансов на сателлитах 9 и 10 вращающие моменты на центральных колесах 5 и 6 не
формируются и трансформатор работает в режиме холостого хода.
2. Для разгона выходного вала Зс помощью энергии двигателя гидроинерционный трансформатор переводят из режима холостого хода в режим трансформации момента следующим образом.
Частоту вращения входного вала 2 повышают двигателем до средней, самой экономичной частоты, затем плавным нажатием на педаль 40 управления, преодолевая усилие пружины 41, перемещают через посредство рычажного механизма 39, втулки 37 и коленчатых рычагов 38 цилиндрические гильзы 14 в крайнее правое положение,полностью открывая дросселируемые щелеобразные окна 16. При этом жидкие грузы 11 под действием центробежных сил начнут перетекать через перепускные окна 15 и 16 из лопастей одних барабанов в лопасти других при проходе ими нижних и верхних положений своей траектории движения и создавать наибольшие дисбалансы на неуравновешенных сателлитах 9 и 10, которыми формируются на центральном колесе 5 первого планетарного механизма максимальный положительный вращающий момент, передаваемый через муфту 34 на выходной вал 3, а на центральном колесе 6 второго планетарного механизма наибольший отрицательный реактивный момент, воспринимаемый корпусом 1 (фиг.З).
Под действием вращающего момента выходйой вал 3 с рабочими органами машины (не показано) приводится в движение в сторону совпадающую с направлением вращения входного вала 2. По мере повышения скорости вращения выходного вала 3 и соответствующего снижения на нём внешнего момента сопротивления педаль 40 управления плавно отпускают, перемещая усилием пружины 41 гильзы 14 влево и прикрывая кольцами 36 щелеобразные окна 16, вследствие чего уменьшается количество грузов, перетекающих через окна 16; уменьшая дисбалансы на сателлитах 9 и 10 и соответственно снижая вращающий момент на выходном валу и реактивный момент -на корпусе.
При этом, перемещения педали 40 управления при регулировании дисбалансов сателлитов 9 и 10 обусловлены сохранением постоянства частоты вращения входного вала 2 без перегрузок двигателя. Если частота вращения вала двигателя стремится к уменьшению или увеличению, то педаль 40 соответственно отпускают или нажимают.
Когда скорость вращения выходного вала 3, повысившись, становится быть близкой к скорости входного вала 2, тогда нажатием на педаль 40 управления дисбалансы сателлитов 9 увеличивают .и переводят трансформатор в режим динамической
5 муфты. Увеличение дисбалансов сателлитов 9 при переходе в режим муфты способствует более надежной работе трансформатора в этом режиме.
Когда при работе трансформатора в ре0 жиме динамической муфты внешний момент сопротивления выходного вала 3 будет : расти и стремиться быть больше от момента входного вала 2, а частота вращения входного и выходного валов будет стремиться к5 снижению (перегрузка двигателя), тогда трансформатор переводят из режима муфты в режим трансформации момента, путем ofпускания педали 40 управления и соответствующего снижения дисбалансов на
0 сателлитах 9 до предела, при котором грузы 11 начинают циркулировать между наружным 12 и внутренним 13 барабанами, а скорость вращения входного вала 2,становится быть большей от скорости выходного вала 3.
5 Регулированием дисбалансов сателлитов в зависимости от внешнего момента сопротивления обеспечивается работа гидроинерционного трансформатора на постоянной, самой экономичной частоте вра0 щения входного вала.; Использованием режима динамической муфты, гасящем крутильные колебания в приводах машин, повышается их долговечность, однако в этом режиме наблюдаются
5 повышенные потери передаваемой мощности на перелопачивание и разогрев жидких грузов, находящихся в лопастях внутренних барабанов.
3. Вместо режима динамической муфты 0- может использоваться более экономичный режим механической передачи момента. / Для чего после разгона выходного вала 3 полностью отпускают педаль 40 управления, переводя инерционную цепь трансфор- 5 матора в режим холостого хода, и посредством тумблера 51 блока 42 включают муфту 32, устанавливая механическую цепь между входным и выходным валами, составленную муфтой 30, вод ил ом 4, зубча- 0 тыми колесами 24, 25, муфтой 32 и зубчатыми колесами 27, 26, и имеющую передаточное число равное единице или близкое к ней.
4. Для обеспечения вращения выходно- 5 то вала 3 в противоположную сторону относительно входного вала 2 после полной остановки выходного вала 3 включают контроллером 44 муфту 35 и плавным нажатием на педаль 40 управления переводят трансформатор из ре.жима холостого хода в режим трансформации момента. При этом положительный вращающий момент от центрального колеса 5 будет передаваться на выходной вал 3 через зубчатые колеса 18, 19, 20, муфту 35 и зубчатые колеса 27, 26, лреобразуясь на них в отрицательный вращающий момент, а выходной вал будет приобретать вращение в заданном направлении.
5. Торможение выходного вала 3 и рабо- чих органов машины с помощью двигателя наиболее эффективно осуществляют при работе трансформатора в режиме механической передачи путем снижения частоты вращения вала двигателя, создавая на вход- ном вале 2 момент сопротивления, под действием которого снижается частота вращения выходного вала 3.
При этом кинематическая энергия рабочих органов машины в период снижения их скорости движения преобразуется в двига- телетормозе в тепловую энергию, которая рассеивается в окружающей среде без возможности ее использования.
6. При торможении выходного вала 3 с помощью маховика 17 вначале отпускают педаль 40 управления, переводя трансформатор в режим холостого хода, затем нажатием на кнопку 49 блока 42 выключают управляемые муфты 30 и 34, разъединяя со- ответственно водило 4 от входного вала 2, а центральное колесо 5 от выходного вала 3, и одновременно включают управляемые муфты 32 и 33, устанавливая механические связи соответственно между выходным ва- лом 3 и водилом 4 и между центральным колесом 5 и маховиком 17, и потом переводят трансформатор в режим трансформации момента, плавно нажимая на педаль 40 управления и перемещая ее на определен- ное расстояние в зависимости от требуемой интенсивности торможения, При этом вращающий момент, создаваемый инерционностью рабочих органов машины, передается от выходного вала 3 через зуб- чатые колеса 26, 27, муфту 32, зубчатые колеса 25, 24, водило 4, инерционную цепь трансформатора, центральное колесо 5, зубчатые колеса 28, 29, муфту 33 и зубчатые колеса 22, 21 на маховик 17. Под действием вращающего момента маховик 17 ускоряет свое вращение, накопляя кинетическую энергию. Одновременно моментом сопротивления, действующим на водиле 4, созда- ется на выходном валу 3 тормозной момент.
Если при торможении требуется остановка выходного вала 3, то после заметного снижения скорости вращения и прекращения его замедления педаль 40 управления отпускают, переводя трансформатор в режим холостого хода, и отпускают кнопку 49 блока 42, выключая муфты 32 и 33 и включая муфты 30 и 34, и дальнейшее торможение выходного вала 3 продолжают с помощью двигателя или рабочего тормоза машины (не показано).
Если в процессе торможения выходного вала 3 требуется поддерживать заданную скорость движения, например транспортного средства, притормаживания его на крутых или пологих спусках дороги.то педалью 40 управления соответственно регулируют величину тормозного момента. Для этих целей в транспортных средствах маховик 17 должен обладать большой энергоемкостью.
Когда в период торможения выходного вала 3 маховик 17 будет стремиться увеличивать частоту вращения выше расчетной, тогда центробежный механизм 47 (фиг.1) размыкая контакты 48S выключает управляемую муфту 33, разобщая механическую связь между центральным колесом 5 и маховиком 17, вследствие чего торможение выходного вала 3 с помощью маховика 17 автоматически прекращается и предупреждается разрушение последнего.
7. Разгон выходного вала 3 с использованием кинетической энергии, накопленной маховиком 17. осуществляется следующим образом.
При работе трансформатора в режиме холостого хода контроллером 44 включают, например, муфту 34, соединяющую центральное колесо 5 с выходным валом 3, и нажатием на кнопку 50 блока 45 выключают муфту 30, разобщая водило 4 от входного вала 2, и одновременно включают муфту 31, устанавливая механическую связь между маховиком 17 и водилом 4, затем плавным нажатием на педаль 40 управления переводят трансформатор из режима холостого хода в режим трансформации момента. При этом момент маховика 17, вращающегося с большой частотой, порядка 10-30 тыс.мин- 1, передается через зубчатые колеса 21, 22, муфту 31, зубчатые колеса 23, 24, водило 4, инерционную Цепь, центральное колесо 5 и муфту 34 на выходной вал 3 и приводит последний в движение. Расстояние, на которое перемещается педаль 40 управления, обуславливается требованиями интенсивности разгона и плавности хода машины.
По мере расходования маховиком 17 кинетической энергии его частота вращения снижается и наступает период, когда прирост скорости вращения выходного вала 3 прекращается, тогда кнопку 50 блока 45 отпускают, разобщая механическую связь между маховиком 17 и водилом 4, и устанавливая связь водила 4 с входным валом 2 и в
дальнейшем используют энергию двигателя.
Использование кинетической энергии, накопленной маховиком 17 в условиях торможения транспортного средства на спусках дорог, может осуществляться непосредственно в послетормозной период для чего трансформатор переводят в режим холостого хода, отпускают кнопку 49 блока 42, прекращая процесс накопления энергии, нажимают на кнопку 50 блока 45 и переводят трансформатор в режим трансформации момента, начиная расход энергии маховика 17 на создание вращающего момента на выходном валу 3.
Использование в приводах машин кинетической энергии, накопляемой маховиком 17 в процессе торможения выходного вала 3, значительно (на 50% и более) повышается их экономичность и снижается выброс в атмосферу теплоты и вредных веществ, ухудшающих экологию окружающей среды.
Включением управляемой муфт в условиях работы трансформатора в режиме холостого хода и плавным регулированием вращающего момента на центральном колесе 5 снижается динамическая нагружен- ность на звеньях трансформатора.
Такое выполнение гидроинерционного трансформатора позволяет за счет принудительного регулирования дисбалансов неуравновешенных сателлитов повысить экономичность трансформатора, а за счет снижения динамической нагруженное™ звеньев повысить его долговечность.
Ф о рмул а и з о б р ете н и я Гидроинерционный трансформатор вращающего момента, содержащий корпус, входной и выходной валы, два планетарных механизма с общим для них водилом, кинематически связанным с выходным валом, каждый из которых включает также центральное колесо, у первого планетарного механизма кинематически связанное с выходным валом, у второго - с корпусом, промежуточные сателлиты, взаимодействующие с ними неуравновешенные сателлиты с жидкими грузами, установленные на водиле соосно парами разных планетарных механизмов с коаксиально установленными по числу сателлитов наружным и внутренним барабанами соответственно с внутренними 5 лопастями в первом планетарном механизме и наружными лопастями во втором планетарном механизме для взаимодействия с жидкими грузами, закрепленные на водиле цилиндрические гильзы, имеющие каждые
0 два перепускных окна, предназначенные для сообщения между барабанами и расположенные диаметрально противоположно на линии центров водила и неуравновешенного сателлита, маховик, зубчатый меха5 низм с паразитным колесом, зубчатые пары и шесть управляемых муфт, из которых первыми тремя водило с помощью зубчатых пар связано соответственно с входным валом, : маховиком и выходным валом, последние
0 два звена с помощью четвертой и пятой муфт и зубчатых пар связаны также с центральным колесом первого планетарного механизма, которое кинематической цепью, включающей зубчатый механизм с паразит5 ным колесом, шестую муфту и зубчатую пару, связано с выходным валом, отличающийся тем, что, с целью повышения экономичности и его. долговечности путем принудительного регулирования дисбалан0 сов неуравновешенных .сателлитов, в нем каждая цилиндрическая гильза установлена на водиле с возможностью осевых перемещений, перепускное окно гильзы, расположенное ближе к центру трансформатора,
5 выполнено щелеобразным в окружном направлении, а трансформатор снабжен цилиндрическими кольцами, охватывающими лопасти любого из барабанов и предназначенными для дросселирования щелеобраз0- ного окна, а также втулкой, установленной на водиле с возможностью осевых перемещений, и коленчатыми рычагами, каждый из которых связывает соответствующую гильзу с упомянутой втулкой, связанной также по5 средством рычажного механизма с педалью управления, подпружиненной в сторону закрытия цилиндрическими кольцами щеле- образного окна гильзы.
. Ј
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидроинерционный трансформатор вращающего момента | 1989 |
|
SU1703898A1 |
| Гидроинерционный трансформатор | 1990 |
|
SU1744350A1 |
| Гидроинерционный трансформатор вращающего момента | 1989 |
|
SU1726877A1 |
| Гидроинерционный трансформатор вращающего момента | 1989 |
|
SU1703897A1 |
| Инерционный трансформатор вращающего момента | 1988 |
|
SU1626029A2 |
| Гидроинерционный трансформатор крутящего момента | 1989 |
|
SU1634888A1 |
| Инерционный трансформатор | 1989 |
|
SU1679099A2 |
| Инерционный трансформатор вращающего момента | 1990 |
|
SU1763770A2 |
| Инерционный трансформатор вращающего момента | 1987 |
|
SU1441126A1 |
| Гидроинерционный трансформатор | 1991 |
|
SU1810686A1 |
Использование: в машиностроении. Сущность изобретения: гидроинерционный трансформатор вращающего момента содержит два планетарных механизма с общим водилом и неуравновешенными жидкими грузами, барабаны с лопастями, маховик, зубчатый механизм, зубчатые пары, шесть управляемых муфт, цилиндриче: ские гильзы с перепускными окнами, одни из которых щелеобразные в окружном направлении, цилиндрические кольца для дросселирования щелеобразных окон и коленчатые рычаги для связи соответствующей гильзы посредством втулки с водилом и с рычажным механизмом педалью управления. 4 ил.
/е. 3
| Инерционный трансформатор вращающего момента | 1987 |
|
SU1441126A1 |
| кл | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Кузнечная нефтяная печь с форсункой | 1917 |
|
SU1987A1 |
| Гидроинерционный трансформатор вращающего момента | 1989 |
|
SU1703897A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
