Изобретение относится к машиностроению и является усовершенствованием изобретения по авт. св. N 1441126,
Целью изобретения является улучшение эксплуатационных характеристик путем повышения коэффициента трансформации момента.
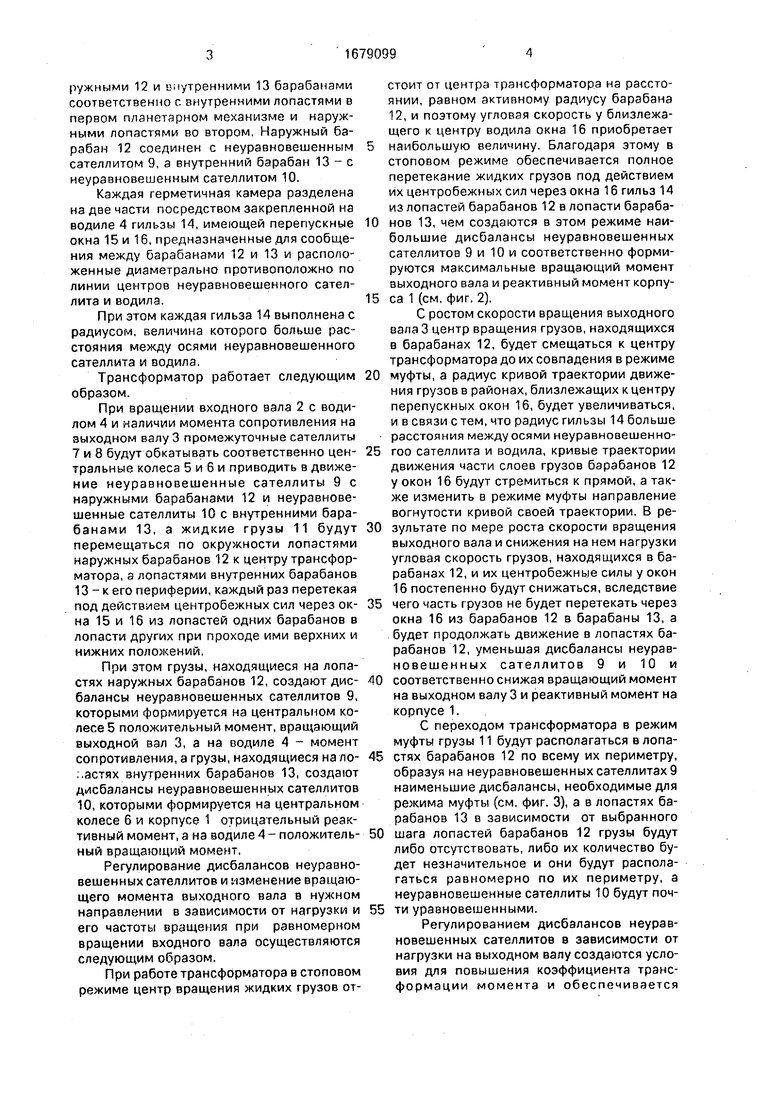
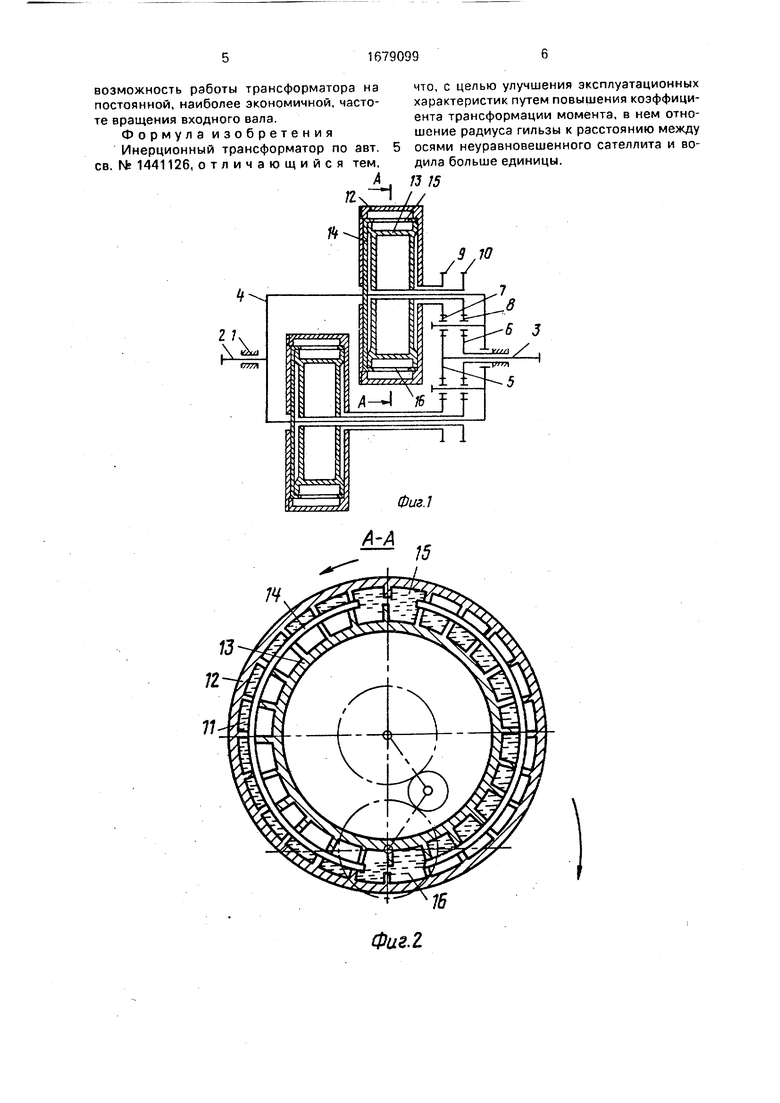
На фиг. 1 показана кинематическая схема инерционного трансформатора; на фиг. 2 - сечение А-А на фиг. 1 при работе трансформатора в стоповом режиме; на фиг.З - то же сечение А-А на фиг. 1, но при работе трансформатора в режиме муфты.
Инерционный трансформатор содержит, корпус 1, размещенные в нем входной 2 и выходной 3 валы и два планетарных механизма с общим для них водилом 4, соединенным с входным взлом 2.
Каждый планетарный механизм включает соответственно центральные колеса 5 и 6, промежуточные сателлиты 7 и 8 и взаимодействующие с ними неуравновешенные сателлиты 9 и 10.
При этом неуравновешенные сателлиты 9 и 10, принадлежащие разным планетарным механизмам, установлены на водиле 4 соосно парами. Центральное колесо 5 первого планетарного механизма соединено с выходным валом 3, а центральное колесо 6 второго планетарного механизма - с корпусом 1.
Грузовое звено каждой пары неуравновешенных сателлитов 9 и 10 выполнено в виде заполненной жидким грузом 11 герметичной камеры, которая образована коаксиально установленными на водиле нао
ч Ю
О
ю
ружными 12 и внутренними 13 барабанами соответственно с. внутренними лопастями в первом планетарном механизме и наружными лопастями во втором, Наружный барабан 12 соединен с неуравновешенным сателлитом 9, а внутренний барабан 13 - с неуравновешенным сателлитом 10.
Каждая герметичная камера разделена на две части посредством закрепленной на водиле 4 гильзы 14, имеющей перепускные окна 15 и 16, предназначенные для сообщения между барабанами 12 и 13 и расположенные диаметрально противоположно по линии центров неуравновешенного сателлита и водила,
При этом каждая гильза 14 выполнена с радиусом, величина которого больше расстояния между осями неуравновешенного сателлита и водила.
Трансформатор работает следующим образом.
При вращении входного вала 2 с води- лом 4 и наличии момента сопротивления на выходном валу 3 промежуточные сателлиты 7 и 8 будут обкатывать соответственно цен- тральные колеса 5 и 6 и приводить в движение неуравновешенные сателлиты 9 с наружными барабанами 12 и неуравновешенные сателлиты 10 с внутренними барабанами 13, а жидкие грузы 11 будут перемещаться по окружности лопастями наружных барабанов 12 к центру трансформатора, а лопастями внутренних барабанов 13 - к его периферии, каждый раз перетекая под действием центробежных сил через ок- на 15 и 16 из лопастей одних барабанов в лопасти других при проходе ими верхних и нижних положений.
При этом грузы, находящиеся на лопастях наружных барабанов 12, создают дис- балансы неуравновешенных сателлитов 9, которыми формируется на центральном колесе 5 положительный момент, вращающий выходной вал 3, а на водиле 4 - момент сопротивления, а грузы, находящиеся на ло- г.астях внутренних барабанов 13, создают дисбалансы неуравновешенных сателлитов 10, которыми формируется на центральном колесе 6 и корпусе 1 отрицательный реактивный момент, а на водиле 4 - положитель- ный вращающий момент.
Регулирование дисбалансов неуравновешенных сателлитов и изменение вращающего момента выходного вала в нужном направлении в зависимости от нагрузки и его частоты вращения при равномерном вращении входного вала осуществляются следующим образом.
При работе трансформатора в стоповом режиме центр вращения жидких грузов отстоит от центра трансформатора на расстоянии, равном активному радиусу барабана 12, и поэтому угловая скорость у близлежащего к центру водила окна 16 приобретает наибольшую величину. Благодаря этому в стоповом режиме обеспечивается полное перетекание жидких грузов под действием их центробежных сил через окна 16 гильз 14 из лопастей барабанов 12 в лопасти барабанов 13, чем создаются в этом режиме наибольшие дисбалансы неуравновешенных сателлитов 9 и 10 и соответственно формируются максимальные вращающий момент выходного вала и реактивный момент корпуса 1 (см. фиг. 2).
С ростом скорости выходного валаЗ центр вращения грузов, находящихся в барабанах 12, будет смещаться к центру трансформатора до их совпадения в режиме муфты, а радиус кривой траектории движения грузов в районах, близлежащих к центру перепускных окон 16, будет увеличиваться, и в связи стем, что радиус гильзы 14 больше расстояния между осями неуравновешенно- гоо сателлита и водила, кривые траектории движения части слоев грузов барабанов 12 у окон 16 будут стремиться к прямой, а также изменить в режиме муфты направление вогнутости кривой своей траектории. В результате по мере роста скорости вращения выходного вала и снижения на нем нагрузки угловая скорость грузов, находящихся в барабанах 12, и их центробежные силы у окон 16 постепенно будут снижаться, вследствие чего часть грузов не будет перетекать через окна 16 из барабанов 12 в барабаны 13, а будет продолжать движение в лопастях барабанов 12, уменьшая дисбалансы неуравновешенных сателлитов 9 и 10 и соответственно снижая вращающий момент на выходном валу 3 и реактивный момент на корпусе 1.
С переходом трансформатора в режим муфты грузы 11 будут располагаться в лопастях барабанов 12 по всему их периметру, образуя на неуравновешенных сателлитах 9 наименьшие дисбалансы, необходимые для режима муфты (см. фиг. 3), а в лопастях барабанов 13 в зависимости от выбранного шага лопастей барабанов 12 грузы будут либо отсутствовать, либо их количество будет незначительное и они будут располагаться равномерно по их периметру, а неуравновешенные сателлиты 10 будут почти уравновешенными.
Регулированием дисбалансов неуравновешенных сателлитов в зависимости от нагрузки на выходном валу создаются условия для повышения коэффициента трансформации момента и обеспечивается
возможность работы трансформатора начто, с целью улучшения эксплуатационных
постоянной, наиболее экономичной, часто-характеристик путем повышения коэффиците вращения входного вала.ента трансформации момента, в нем отноФормула изобретенияшение радиуса гильзы к расстоянию между
Инерционный трансформатор по авт. 5осями неуравновешенного сателлита и восв. № 1441126, отличающийся тем,дила больше единицы.
A./J/5 КхГ±А
| название | год | авторы | номер документа |
|---|---|---|---|
| Инерционный трансформатор вращающего момента | 1988 |
|
SU1626029A2 |
| Инерционный трансформатор вращающего момента | 1990 |
|
SU1763770A2 |
| Гидроинерционный трансформатор | 1990 |
|
SU1744350A1 |
| Инерционный трансформатор вращающего момента | 1989 |
|
SU1665127A2 |
| Гидроинерционный трансформатор вращающего момента | 1989 |
|
SU1726877A1 |
| Гидроинерционный трансформатор вращающего момента | 1991 |
|
SU1786301A1 |
| Инерционный трансформатор вращающего момента | 1987 |
|
SU1441126A1 |
| Гидроинерционный трансформатор крутящего момента | 1989 |
|
SU1634888A1 |
| Гидроинерционный трансформатор вращающего момента | 1989 |
|
SU1703898A1 |
| Гидроинерционный трансформатор | 1991 |
|
SU1810686A1 |
Изобретение относится к машинострое- нию.С целью улучшения эксплуатационных характеристик путем повышения коэффициента трансформации, размер радиуса гильзы 14 выбран больше расстояния-между осями водила 4 и неуравновешенными сателлитами 9 и 10. В результате этого при росте скорости вращения выходного вала 3 и снижении на нем нагрузки сопротивления угловая скорость жидких грузов 11, находя щихся в лопастях наружных барабанов 12, и их центробежные силы у близлежащих к центру перепускных окон 16 снижаются, часть грузов не перетекает через окна 16 из барабанов 12 в барабаны 13, уменьшая дисбалансы неуравновешенных сателлитов 9 и 10 и регулируя тем самым величину вращающего момента на выходном валу 3 при постоянной частоте вращения входного вала 2. В стоповом режиме жидкие грузы 11 полностью перетекают через окна 16 гильз 14 из лопастей барабанов 12 в лопасти барабанов 13, создавая максимальные дисбалансы неуравновешенных сателлитов 9 и 10 и соответственно максимальные вращающие моменты благодаря большим радиусам гильзы 14 и барабанов 12 и 13, 3 ил. сл с
щ
13
ш
J -в з
хш/ .
Э2
Л f|
11
Фиг.1
Фиг.г
п
Фиг.З
JU
| Инерционный трансформатор вращающего момента | 1987 |
|
SU1441126A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
