ел
С

| название | год | авторы | номер документа |
|---|---|---|---|
| ПЛАВУЧАЯ УСТАНОВКА ДЛЯ БУРЕНИЯ СКВАЖИН С ОПОРНЫХ БЛОКОВ | 2008 |
|
RU2392380C1 |
| Морская ледостойкая платформа | 1990 |
|
SU1767086A1 |
| Морская ледостойкая платформа | 1989 |
|
SU1770522A1 |
| Способ местного нанесения гальванических покрытий | 1990 |
|
SU1767042A1 |
| Плавучая платформа | 1981 |
|
SU988971A1 |
| Плавучая платформа | 1977 |
|
SU791842A1 |
| САМОПОДЪЕМНАЯ МОБИЛЬНАЯ ЛЕДОСТОЙКАЯ БУРОВАЯ ПЛАТФОРМА ТЕЛЕСКОПИЧЕСКОГО ТИПА И СПОСОБ ЕЕ ТРАНСПОРТИРОВКИ, МОНТАЖА И ДЕМОНТАЖА | 2011 |
|
RU2467122C1 |
| СПОСОБ МОНТАЖА ОПОРНОГО БЛОКА ПЛАТФОРМЫ | 2010 |
|
RU2446250C2 |
| СПОСОБ СООРУЖЕНИЯ ОПОРЫ МОСТА В ВОДНОЙ АКВАТОРИИ | 2023 |
|
RU2809049C1 |
| ЛЕДОСТОЙКИЙ ОПОРНЫЙ БЛОК МОРСКОГО ИНЖЕНЕРНОГО СООРУЖЕНИЯ | 2010 |
|
RU2446249C2 |
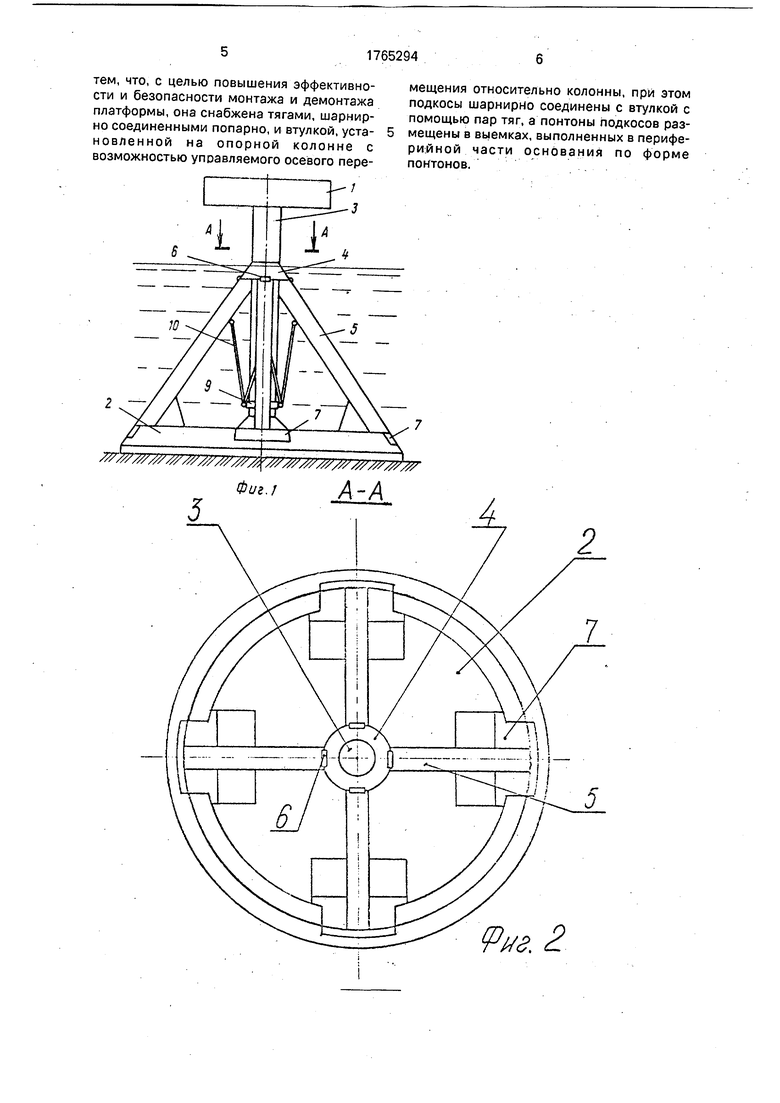
Использование: создание морских гидротехнических сооружений и, в частности, строительство, установка и перемещение морского эксплуатационного сооружения, предназначенного для добычи нефти и газа. Сущность: морская платформа содержит верхнее строение 1, установленное на основании посредством опорной колонны 3 с подкосами 5, которые шарнирно закреплены на колонне. Новым в конструкции является то, что на колонне дополнительно установлена втулка 9 с возможностью управляемого осевого перемещения. Втулка соединена с каждым из подкосов парой тяг 10. На периферии каждого подкоса размещен понтон 7, соответствующий по формэ выемкам в основании. 4 ил.
Изобретение относится к созданию морских гидротехнических сооружений и, в частности, к строительству, установке и перемещению морского эксплуатационного сооружения, предназначенного для добычи нефти и газа.
Цель изобретения - повышение эффективности и безопасности монтажа и демонтажа сооружения.
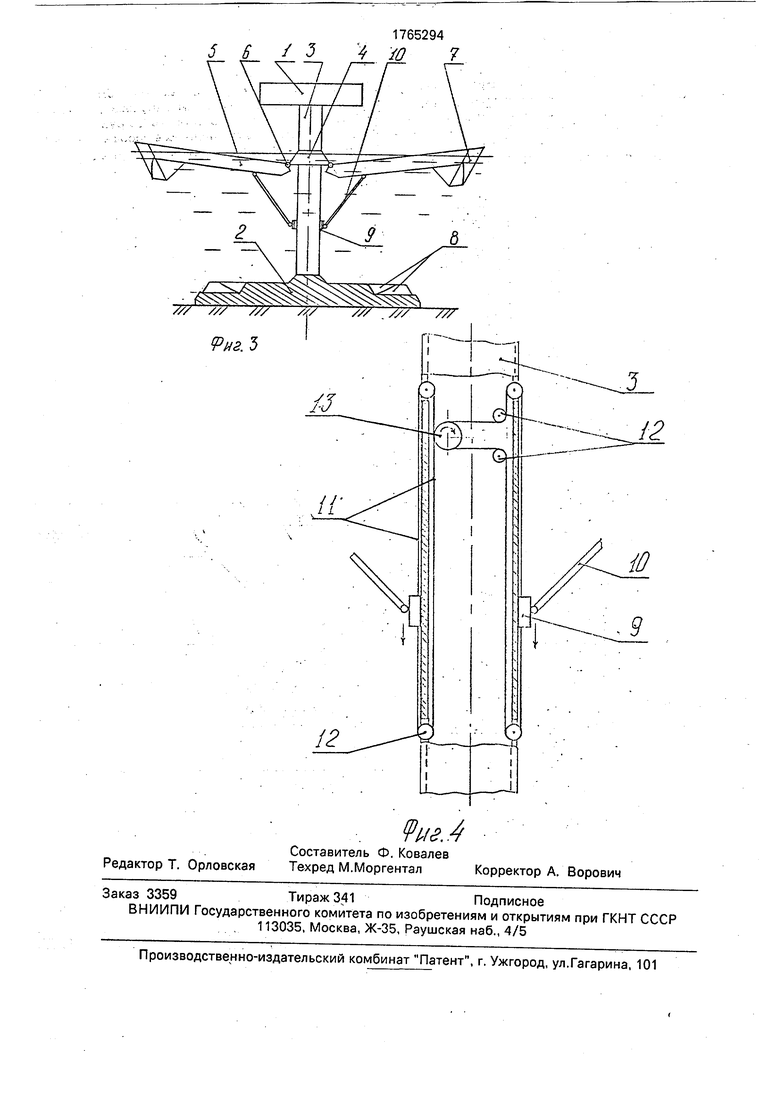
На фиг. 1 изображен общий вид морской платформы в рабочем положении; на фиг.2 - сечение А-А на фиг.1; на фиг.З - морская платформа в монтажном положении (в момент установки на дно); на фиг.4 - кинематическая схема управления перемещением втулки вдоль колонны (при опускании подкосов после установки на дно или всплытии).
Морская платформа состоит из верхнего строения 1, основания, выполненного в виде опорного понтона 2, и соединяющей их опорной колонны 3. На колонне 3 имеется кольцевой выступ 4, к которому присоединяются подкосы 5 посредством шарниров 6. На нижних концах подкосов 5 размещены понтоны 7 регулируемой плавучести, форма которых соответствует выемкам 8 в понтоне 2. Кроме того, на колонне 3 с возможностью управляемого перемещения вдоль нее размещена втулка 9, соединенная с каждым подкосом 5 парой тяг 10. Тяги 10 шарнирно присоединены к втулке 9 и подкосам 5, при этом число тяг 10 вдвое превышает число подкосов 5 (см.фиг, 1-2).
Управление перемещением втулки 9 может осуществляться любым известным способом, например, на тросах грузоподъемного устройства типа лебедки, установленного в верхней части колонны 3.
При этом втулка 9 является перемещаемым элементом, а в качестве направляющего - используется колонна 3. Указанная система (см.фиг.4) включает замкнутый трос (или цепь) 11, жестко связанный с втулкой 9 и огибающий блоки или звездочки 12, рас-ч о ел
Ю
ю N
положенные в верхней и нижней частях колонны 3, а также барабан 13, связанный с приводом (не показан), сообщающим вра- щательно-реверсивное движение барабану, скорость вращения которого регулирует скорость перемещения втулки 9.
Устройство работает следующим образом.
Изготовление и сборка морской платформы, включая верхнее строение, полностью производятся на предприятии - изготовителе или в защищенной водной акватории достаточной глубины (например, фиорд).
Транспортировка сооружения к месту установки производится на плаву с использованием плавучести опорного понтона 2, в вертикальном положении вместе с установленным верхним строением, при этом понтоны 7 находятся в выемках 8 опорного понтона 2.
По прибытии на место установки начинают балластировку внутренних плавучих объемов опорного понтона 2, предварительно высвободив понтон 7 из зацепления. При этом приводится в движение за счет выталкивающей силы, действующей на понтоны 7, группа элементов конструкции, включающая подкосы 5, шарниры 6, тяги 10 и втулку 9. За счет поворота подкосов 5 в шарнирных узлах 6 движение происходит в вертикальной плоскости, проходящей через ось колонны 3 и подкос 5, ри этом втулка 9 совершает движение вдоль оси колонны. Поскольку движение всех элементов указанной группы жестко связано, то путем управления скоростью движения втулки 9 вдоль колонны задается скорость движения указанных элементов как вверх, так и вниз (при демонтаже платформы).
С помощью грузоподъемного устройства типа лебедки обеспечивается равномерное движение втулки 9 с заданной (безопасной) скоростью, при которой не могут развиться в конструкции значительные по величине инерционные силы, а понтоны 7, находящиеся на концах подкосов 5, остаются на поверхности воды в течение всего периода погружения, создавая тем самым необходимый момент инерции ватерлинии, достаточный для погружения опоры без опасности опрокидывания. При достижении опорным понтоном 2 поверхности дна, вес платформы передается на дно. Платформа приобретает устойчивое положение, после чего понтоны 7 балластируются и плавно, одновременно с помощью контролируемого движения втулки переводятся в нижнее положение, размещаясь в выемках 8 понтона 2, а втулка 9 при этом устанавливается в нижнем положении. Такое расположение подкосов 5, когда их нижний конец с понтоном 7 расположен в выемке 8, а верхний конец подкоса 5 упирается в выступ 4 на колонне 3 позволяет им включаться в работу и передавать горизонтальые нагрузки, действующие на колонну через нижний опорный понтон 2 на дно, образуя таким
образом в рабочем состоянии колонны жесткую треугольную конструкцию.
Таким образом, выполнение втулки 9, жестко связанной с другими элементами конструкции, с возможностью управляемого перемещения вдоль оси колонны позволяет изменять геометрическую схему опорной части платформы в процессе погружения и всплытия, когда необходимым условием работы является расположение
подкосов 5 с понтонами 7 на поверхности воды за счет поворота подкосов 5 вокруг шарнирных узлов 6, а в рабочем положении (на дне) увеличивается сопротивление опорной части платформы действию горизонтальных нагрузок за счет включения в работу подкосов 5, взаимодействующих верхним концом с выступом 4, а нижним - с выемкой 8 опорного понтона.
Использование заявляемого технического решения, по сравнению с прототипом, обеспечивает следующие преимущества:
средств.
воды.
Таким образом, предлагаемая конструкция морского сооружения предполагает его рациональное использование при строительстве, установке и перемещении морских платформ. Кроме того, заявляемое
техническое решение позволяет получить дополнительный эффект, выражающийся в снижении транспортных затрат при установке сооружения,
Формула изобретения
Морская платформа, содержащая верхнее строение, установленное на основании посредством опорной колонны, к которой шарнирно присоединены подкосы, на свободных концах которых размещены балластируемые понтоны, отличающаяся
тем, что, с целью повышения эффективности и безопасности монтажа и демонтажа платформы, она снабжена тягами, шарнир- но соединенными попарно, и втулкой, уста- новленной на опорной колонне с возможностью управляемого осевого пере///////7/////////// /// /7/ /} Ж //
Фиг./А А
3
мещения относительно колонны, при этом подкосы шарнирно соединены с втулкой с помощью пар тяг, а понтоны подкосов размещены в выемках, выполненных в периферийной части основания по форме понтонов.
2
Рж 2
5 б
/// ////77 /7 7/7
Риг.Ъ
1765294
to
| Патент США № 4000624, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
