1
Изобретение относится к морской технике, а именно к плавучим установкам, выполняющим разведочное бурение, а также эксплуатационное обслуживание скважин неф5и и газа на дне морей.
Известна плавучая платформа, содержащая несущий понтон с технологическим оборудованием и подъемниками, в которых размещены опорные колонны. Платформа в плавучем состоянии с поднятыми опорными колониами буксируется на место бурения, где с помощью подъемников колонны опуска- -О ются на дно моря, а затем осуществляют подъем несущего понтона над поверхностью воды (1.
Известна также плавучая платформа, со держащая несущий понтон с технологическим оборудованием и подъемниками, которые взаимодействуют с пропущенными в них опорными рещетчатыми колоннами. Платформа в плавучем состоянии с поднятыми опорными колоннами буксируется на место бурения и здесь корпус с помощью подъ, |р емников поднимается над поверхностью во. ды. Безопасность платформы в период буксировки и выполнения работ на месте эксплуатации, устойчивость, прочность опор ных колонн определяется величиной суммарного ветро-волно1зого воздействия |2).
Недостатками таких устройств следует счи- тать больщую парусность при транспортировании, материалоемкость всего сооружения, вероятность раскачки и опрокидывания, сложность монтажа и демонтажа на месте эксплуатации, связанную с рельефом дна и несущей способностью грунтов основания под опорами.
Цель изобретения - повыщение остойчивости платформы при транспортировании и упрощенней выполнения работ по монтажу и последующему демонтажу на месте эксплуатации.
Указанная цель достигается тем, что ниАняя часть каждой опорной колонны снабжена укрепленной на ней посредством щарнира дополнительной опорой с кронщтейном, взаимодействующим при перемещении колонны с подъемником и с шарнирным упором, которым снабжен понтон, причем опора фиксируется на колонне посредством замка с датчиком.
В целях обеспечения автоматического управления дополнительной опорой, замок выполнен в виде шарнирно укрепленного
на нижнем торце колонны подпружиненного рычага, один конец которого посредством выступа со скосом взаимодействует с верхним торцом дополнительной опоры и датчиком, а другой - с шарнирным yrJopoM, при этом взаимодействующие друг с другом концы кронштейна и шарнирного упора выполнены в виде цапф и кулисы соответственно, соединяемых посредством штока гидроцилиндра, установленного на кулисе, и управляемого датчиком.
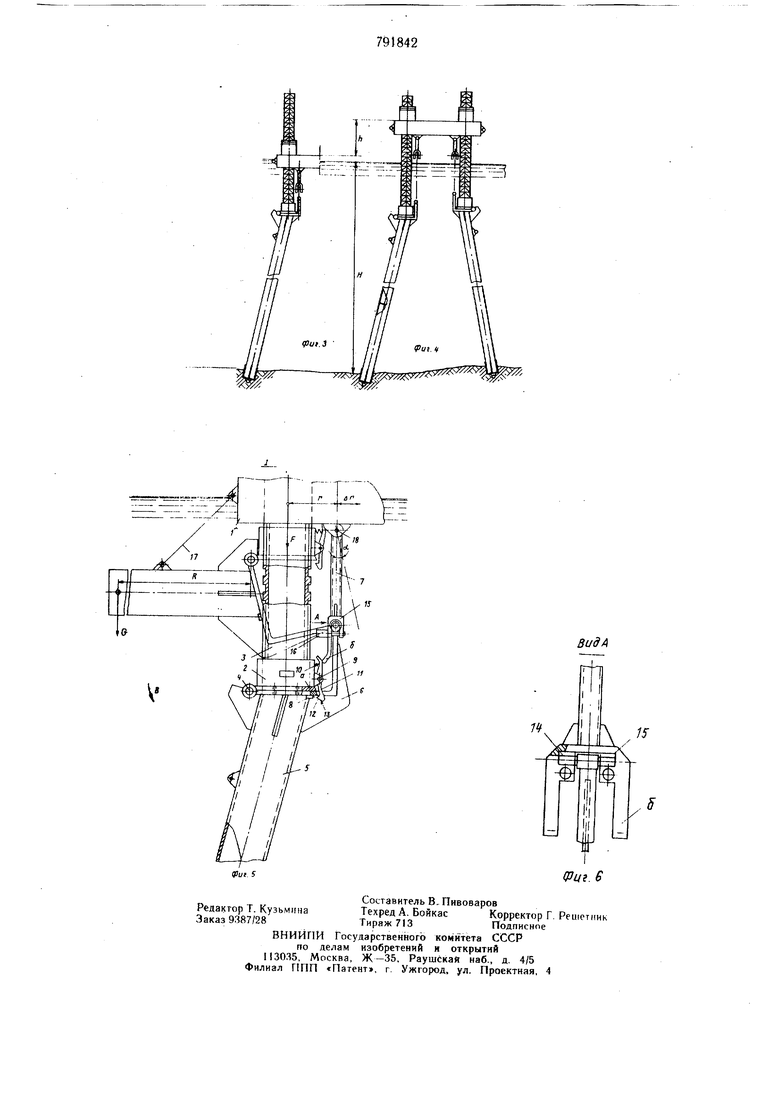
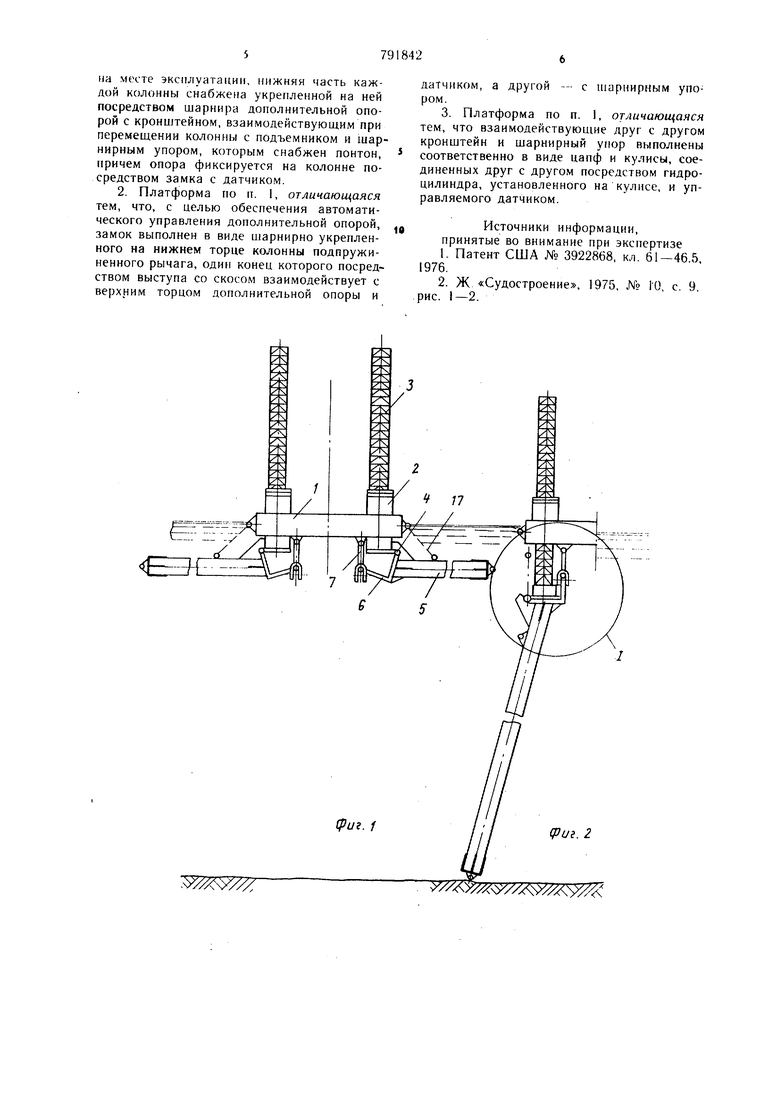
На фиг. I изображена платформа в транспортном положении, вид сбоку; на фиг. 2 - платформа на месте эксплуатации, начальное положение установки; на фиг. 3 - то же после завершения установки; на фиг. 4 - платформа после завершения установки при неровном дне; на фиг. 5 - узел I на фиг. 2; на фиг. 6 - вид по стрелке А на фиг. 5. Плавучая платформа содержит несущий понтон I с подъемником 2, взаимодействующими с пропущенными в них опорными решетчатыми колоннами 3, у каждой из которых нижняя часть снабжена укрепленной посредством шарнира 4 дополнительной опорой 5, выполненной с фигурным крони1тейном 6, взаимодействующим при перемeu etши колонны 3 подъемником 2 с шарнирным упором 7, которым снабжен понтон К При этом опора фиксируется на ко.юпне 3 посредством замка взаимодействующего с датчиком 8. Замок выполнен в виде укрепленного посредством шарнира 9 на нижнем конце колонны-3 и распираемого пр/жиной 10 рычага II, один конец которого посредством выступа 12 со скосом 13 1 4димодействует с верхним концом дополнительной опоры 5, а другой - с упором 7 и датчиком 8. Взаимодействующие концы кронштейна б и упора 7 выполнены в виде цапф 14 и кулисы 15, соединенных друг с другом гидроцилиндром 16, управляемым датчиком 8. Для фиксирования дополнительной опоры 5 в транспортном горизонтальном положении предусмотрена связь 17. Упор 17 соединен с понтоном I шарниром 18.
Устройство работает следующим обра ЗОМ.
Монтаж (установка) платформы. После доставки платформы на место эксплуатации отсоединяют связи 17 (удаляй при этом газ, или добавляя балласт) из опор 5 и подъемниками 2 синхронно опускают колонны 3 вниз.
Под действием силы собственной тяжести G, т. е. момента G -R и усилия подачи колонны 3, т. е. момента F -г, опора 5 опускается вниз, поворачиваясь на шарнире 4. При этом упор 7 на шарнире 18 поворачивается на угол «, обеспечивающий свободное движение кронштейна 6, и затем возвращается в момент стыкования колонны 3 с 5 в исходное положение. По мере движения опоры 5 (в этом время гидроцилиндр 16 своим штоком держит цапфы 14
закрепленными н кулисе 15 (скос 13, вза имодействуя с плоским- торцом а кронштейна 7,отклоняется и выступ 12, заскакивая под воздействием пружины И) за торец а, запирает кронштейн 6, т. е. и опору 5. При этом выступ 12 воздействует на датчик 8, вследствие чего гидроцилиндр 16 освобождает цапфы 14, т. е. исключает механическую связь упора 7 с кронштейном 6.
При дальнейц е.м опускании колонн 3 вместе с опорами 5 последние врезаются в-грунт дна, а понтон с рабочей площадкой и технологическим оборудованием приподнимаются над уровнем воды на высоту h, исключающую воздействие волн на платформу.
Демонтаж платформы. Онуская понтон 1 по колоннам 3, фигурные концы б кулисы 15, приближаясь к верхнему концу рычага II, нажимают на него и сжимая пружину 10 выводят выступ 12 из взаимодействия с торцом а кронштейна бис датчиком 8, что обеспечивает включение гидроцилиндра 16 и последующее запирание цапф 14 в кулисе 15. Так как кулиса 15 соединена с упором 7 с возможностью некоторого осевого сме1цения по ве()тикали относительно друг друга, то передача усилия сжатия упора 7 на кронщтейн 6 происходит с некоторым запаздыванием по отношению к началу взаимодействия верхнего конца рычага II с концом б кулисы 15, что обеспечивает поворот опоры 5 на шарнире 4 только после раскрытия замка и тем самым исключается возможность поломки замка и кулисы.
Последующим выдвижef иeм колонн 3 вниз с одновременным уменьшением балласта (или увеличением легкого газа) п опорах 5 осуществляется их поворот до горизонтального положения, в котором они прикрепляются к понтону связями 17. После этого платформа может быть переведена на новое место.
Таким образом, предлагаемая платформа, как это ясно из описания, уменьшает длину колонн 3, а в транспортном положении над понтоном I возвыц ается только небольшой участок колонн 3, чем снижается парусность платформы и следовательно уменьшается вероятность ее раскачки и опрокидывания, при этом плавающие дополнительные опоры 5 повышают остойчивость платформы.
Формула изобретения
1. Плавучая платформа, содержащая несущий понтон с подъемниками, взаимодействующими с пропущенными в них опорными колоннами, отличающаяся тем, что, с целью повышения остойчивости при гранспортировании и упрощения вьию.шения работ по монтажу и последующему демонтажу
на месте эксплуатации, нижняя часть каждой колонны снабжена укрепленной на ней посредством шарнира дополнительной опорой с кронштейном, взаимодействующим при перемещении колонны с подъемником и шарнирным упором, которым снабжен понтон, причем опора фиксируется на колонне посредством замка с датчиком.
2. Платформа по п. 1, отличающаяся тем, что, с целью обеспечения автоматического управления дополнительной опорой, замок выполнен в виде шарнирно укрепленного на нижнем торце колонны подпружиненного рычага, один конец которого посредством выступа со скосом взаимодействует с верхним торцом дополнительной опоры и
датчиком, а другой - с шарнирным упором.
3. Платформа по п. 1, отличающаяся тем, что взаимодействующие друг с другом кронщтейн и шарнирный упор выполнены соответственно в виде цапф и кулисы, соединенных друг с другом посредством гидроцилиндра, установленного на кулисе, и управляемого датчиком.
Источники информации, принятые во внимание при экспертизе
1.Патент США № 3922868, кл. 61-46.5. 1976.
2.Ж «Судостроение. 1975, № iO, с. 9. рис. 1-2.

| название | год | авторы | номер документа |
|---|---|---|---|
| Плавучая платформа | 1981 |
|
SU988971A1 |
| Грузоподъемное судно катамаранного типа | 1977 |
|
SU885101A1 |
| ГИДРАВЛИЧЕСКИЙ ПОДЪЕМНИК | 1967 |
|
SU192122A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПЕРЕВОЗКИ ТЯЖЕЛЫХ КРУПНОГАБАРИТНЫХ ГРУЗОВ | 1991 |
|
RU2023604C1 |
| ПОДЪЕМНИК | 1993 |
|
RU2061648C1 |
| Судно для подъема затонувших объектов | 1981 |
|
SU1063705A1 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА ДЛИННОМЕРНЫХ КОНСТРУКЦИЙ | 1995 |
|
RU2076840C1 |
| ПЛАВУЧАЯ УСТАНОВКА ДЛЯ БУРЕНИЯ СКВАЖИН С ОПОРНЫХ БЛОКОВ | 2008 |
|
RU2392380C1 |
| БУРОВАЯ ПЛАТФОРМА | 2003 |
|
RU2231594C1 |
| ПОДЪЕМНИК ГИДРАВЛИЧЕСКИЙ | 2011 |
|
RU2458849C1 |