(5) ПЛАВУЧАЯ ПЛАТФОРМА
| название | год | авторы | номер документа |
|---|---|---|---|
| Опорно-подъемное устройство самоподъемной плавучей установки | 1981 |
|
SU1105453A2 |
| Плавучая платформа | 1977 |
|
SU791842A1 |
| МОРСКОЙ БУРОВОЙ КОМПЛЕКС | 2005 |
|
RU2283259C1 |
| Грузоподъемное судно катамаранного типа | 1977 |
|
SU885101A1 |
| ОПОРНАЯ КОЛОННА САМОПОДЪЕМНОЙ ПЛАВУЧЕЙ ПЛАТФОРМЫ СО СЪЕМНЫМ БАШМАКОМ И СПОСОБ СОЕДИНЕНИЯ УПОМЯНУТОЙ ОПОРНОЙ КОЛОННЫ С БАШМАКОМ | 1997 |
|
RU2133794C1 |
| МОРСКАЯ ПЛАВУЧАЯ ПЛАТФОРМА | 2014 |
|
RU2556408C1 |
| СПОСОБ ЛОКАЛЬНОГО ПЕРЕМЕЩЕНИЯ И КОРРЕКЦИИ МЕСТОПОЛОЖЕНИЯ ПЛАВСРЕДСТВА | 2023 |
|
RU2799688C1 |
| ЛЕДОСТОЙКАЯ САМОПОДЪЕМНАЯ ПЛАТФОРМА ДЛЯ ЗАМЕРЗАЮЩЕГО МЕЛКОВОДЬЯ И СПОСОБ ЕЕ МОНТАЖА | 2011 |
|
RU2499098C2 |
| ВОЛНОСТОЙКИЙ САМОХОДНЫЙ КАТАМАРАННЫЙ КОМПЛЕКС | 2008 |
|
RU2398705C2 |
| ПЛАВУЧАЯ ПЛАТФОРМА И СПОСОБ ЕЕ СБОРКИ | 1995 |
|
RU2137670C1 |
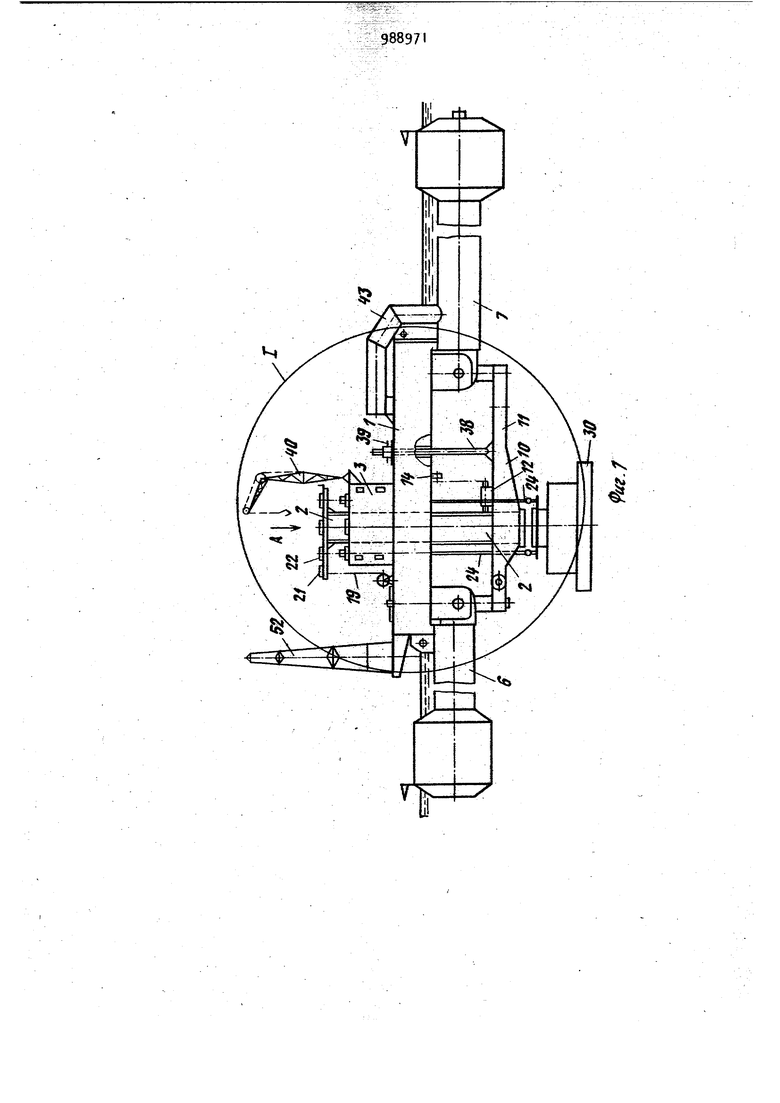
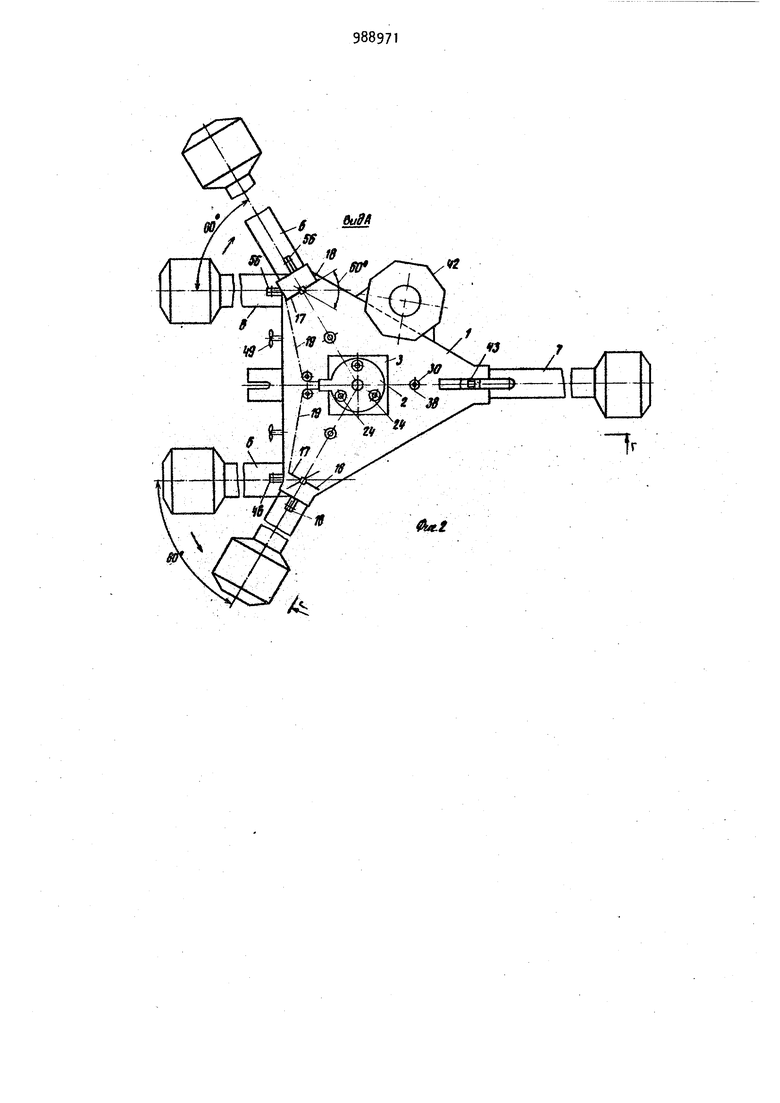

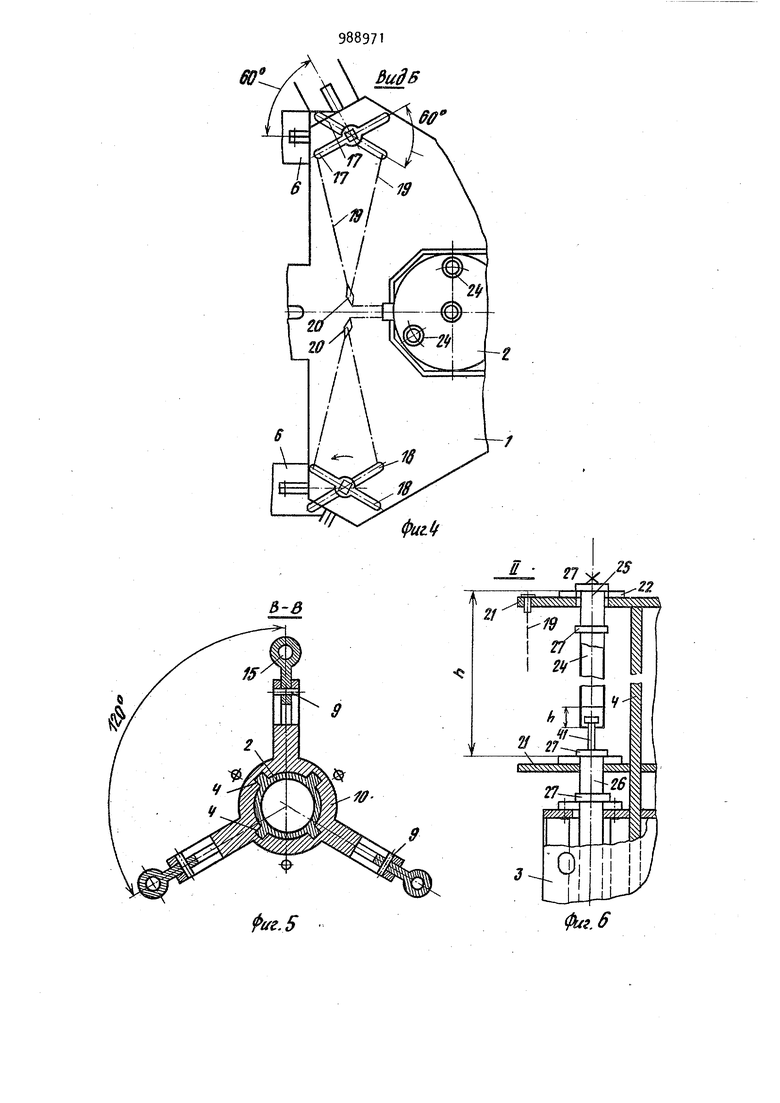

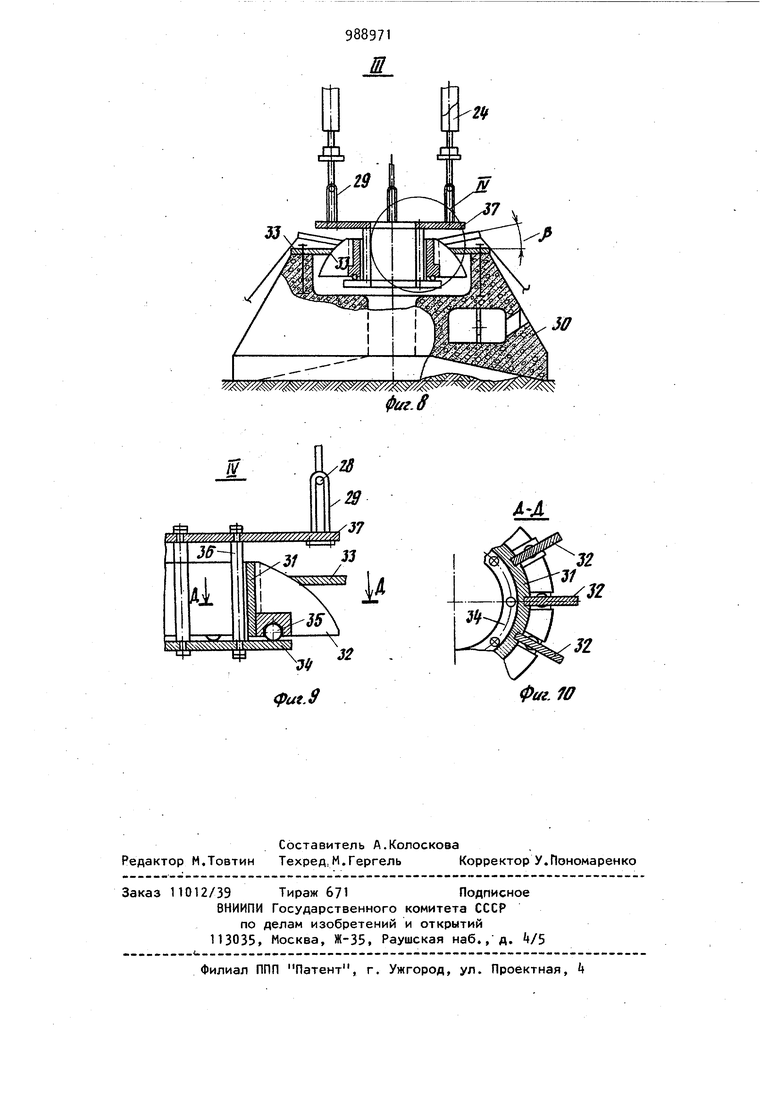
Изобретение относится к морской технике, а именно к плавучим платформам, которые используются на морских акваториях при ведении разведоч ных и эксплуатационных работ, спуско подъемных работ с крупногабаритными подводными судами и аппаратами. Известна плавучая платформа с.тро соякорной стабилизацией 1 J . Недостатком плавучей платформы является тросоякорная стабилизация, которая ограничена недостаточным натяжением, что зависит от ненадежности якорных систем стабилизации, от вертикально вырывных сил, противодействие которым ограничено. Известна также плавучая платформа содержащая несущий понтон, подъемник с силовой колонной и поворотные в вертикальной плоскости опорные колонны с кронштейнами t 2 . Недостатком ее является необходимость применения и контроля устройст ва для синхронизации подъемных колон значительное боковое сопротивление перемещению платформы вследствие боль -. шой длины колонн, что резко снижает скорость ее движения. Цель изобретения - упрощение конструкции путем применения одного подъемника для силового воздействия на все опорные колонны, а также повышение скорости и безопасности перемещения по акватории моря за счет уменьшения лобового сопротивления. Указанная цель достигается тем, что кронштейны соединены между собой обоймой с кулисными рычагами, внутри которой свободно пропущена силовая колонна, причем обойма снабжена фиксатором, поочередно взаимодействующих с силовой колонной и несущим понтоном, кроме того, с целью повышения скорости и безопасности перемещения по акватории моря за счет уменьшения лобового сопротивления, задние опорные колонны соединены с несущим понтоном с возможностью вращения в горизонтсэльнои плоскости на вертикальных осях снабженных приводами вращения, дополнительно привод вращения может быть, выполнен в укрепленной на вертикальной оси парой рычагов противоположные концы которых с возможностью поочередно подсоединения, посредством гибкой тяги, кинематически раязаны с силовой колонной, кроме того, с целью обеспечения автономности действия, силовая колонна может быть (Снабжена механизмом перехвата, взаимодействующим с тягами, на которых укреп лен донный балласт. На фиг. 1 показана платформа в транспортном положении, вид сбоку; на фиг.2 - вид А на фиг.Т; на фиг.З узел I на на фиг. - вид Б на фиг. 3; на фиг. 5 - разрез В-В на фиг. 3; на фиг. 6 узел I I на фиг. 3; на фиг. 1 разрез Г-Г на фиг. 2; на фиг. 8 - узел I I I на фиг. 7; на фиг. 9- узел JV на фиг. 8; на фиг.10 разрез Д-Д на фиг.9. Плавучая платформа содержит несущий понтон 1, в центре которого размещен подъемникс силовой колонной 2, свободно пропущенной в портале 3 и не сущем понтоне 1. Силовая колонна 2 выполнена с зубчатыми рейками Ц (фиг.З, 5 и 6) с которыми поочередно взаимодействуют зубчатые перехваты (не показаны) штоков гидродомкратов 5 (фиг.З) , соединенных с несущим понтоном 1, поворотные в вертикальной плоскости опорные колонны: задние - 6 (фиг.1-3 и 7) и передняя - 7 (там же) укрепленные )ла осях 8 (фиг.З) и снабженные Г-образными кронштейнами, соединенными между собой.с помощью осе1вых шарниров 9,обоймой 10 (фиг.З и 7) выполненной. с кулисными рычагами и (фиг.1 и 7). В,центре обоймы 10 свободно пропущена колонна 2, сама обойма снабжена фиксатором, поочередно взаимодействующим с,силовой колонной 2 и понтоном 1. Фиксатор обоймы выпол |нен в виде двухштокового гидроцилиндра 12 (фиг.1 и 3), один из штоков которого может входит в пазы 13 выполненные в теле силовой колонны 2, а другой - а аналогичных паз (не показан) вертикального кронштейна 1, которым снабжено днище понтона 1. Задни опорные поворотные колонны 6 соединены с несущим понтоном 1. с возможностью вращения в горизонтальной плоскос тИ на вертикальных осях 15, снабженных приводами их (осей) вращения вмес те с колоннами, каждый из приводов вы полней в виде укрепленной на стоике 1б, являющейся продолжением оси 15, парой рычагов 17 и 18, противоположные концы 17 и 18 (фиг.2 и 3) которых с возможностью поочередного подсоединения гибкими тягами 19 (фиг.1-4 и 6) кинематически связаны с силовой колонной 2. Тяга 19 через ролики 20 присоединена к верхней площадке 21 силовой колонны 2, снабженной механизмом перехвата, включающим подвижные 22 и неподвижные 23 замки, взаимодействующие с тягами 2, которые, выполнены в виде плетей из полых трубчатых секций соединяемых между собой муфтами 25, выполненными в виде скользящих по оси пар муфт 25 и 26, и снабженных фланцами 27. На тягах 24 посредством . пальцев 28, скользящих в прорезях серы 29,. укреплен донный балласт 30 (фиг.8 и 9). Между донным балластом 30 и серьгами 29 размещен шаровой шарнир, который выполнен в виде обработанных по сфере и укрепленных на цилиндрической поверхности втулки 31 (фиг.8, 9 и 10), секторных пластин 32, на которые опирается несущий кольцевой диск 33 (фиг.8и 8), торец у отверстия которого обработан по сфере того же радиуса, что и у пластин 32. Шаровой шарнир подвешен на подпятнике 34 (фиг.9) с возможностью свободного перекатывания на шариках 35 причем подпятник 34 связан стойками 36 с несущим фланцем 37 (фиг.9),прикрепленным к серьгам 29. Внутри донного балласта 30 предусмотрено полость-помещение спецназначения, которое может быть использовано, в .частности, для размещения аварийного персонала. Платформа снабжена подвесными штангами 38 (фиг.1, 4, 2) с фиксаторами 39, служащими для длительного фиксирования положения обоймы 10 относи-, тельно несущего понтона 1 при транспортировании плавучей платформы. На портале 3 установлен кран 4о (фиг.1, 3, и 7), служащий для наращивания секций тяг 24, соединяемых друг с другом в плети с некоторой продоль.ной (осевой)подвижностью (см.фиг.б) посредством муфт 41. Платформа снабжена вертолетной площадкой 42 (фиг.2, 3, и 7), трубчатым Г-образным переходником 43 (фиг.7), жестко укрепленным на передней колонне 7 и служащим для перемещения персонала к шахте 44 59 (фиг.) в спецпомещение , пластинам и 7 для дополнительной связи посредством пальцев 8 опорных колон 6, 7 (фиг.З) с несущим понтоном t в транспортном положении, двигателями ЦЭ (при необходимости автономного перемещения (фиг.2), емкости 50 ч (фиг.7) с балластной жидкостью 51. При необходимости платформа может быт также оснащена буроеой вышкой 52 (фиг.7). Для выхода обслуживающего персонала имеется шлюзовое устройство 53 на несущем .почтоне 1, предусмо рена вспомлебёдка 5 (фиг.З). В донном балласте имеется конусная выемка 55. На несущем понтоне 1 размещены упоры 5б, С которыми при повороте в горизонтальной плоскости взаимрдейст вуют задние опорные колонны 6. Перед няя опорная колонна 7 снабжена глухи соединением 57, а несущий понтон 1 соединен с переходником 3 посредств трапа 58 для входа в него. На чертеже обозначено: знаком поверхность моря (уровень моря); Н, Ни Н(фиг.7) - соответственно расстояние от верхней площадки несущего понтона 1 до дна моря,- глубина погружения платформы (колонн), возвышение верхней площадки над у|Х)Внем моря (Т 60 - на фиг.2 и Ц - УГОЛ поворота задних опОгрных колонн 6 в горизонталь ной плоскости (постоянной); oL на фиг. и 7 - переменный угол отклонения опор ных колонн 6 и 7 в вертикальной плоскости; |Ьна фиг.8 - угол приспособляемости балласта 30 к рельефу дна моря (половина teлecнoгo угла, опи сываемого центральной осью шарового шарнира); 120® на фиг.5 - угол расстояния опорных колонн при трехчасовом трехточечном варианте опирания (предст .лен только этот вариант); на фиг.4 угол поворота рычагов 17 и 18 (соответствует углу поворота задних опорных колонн 6);h на фиг.З - рабочий ход силовой колонны 2 в портале 3, при котором обеспечивается поворот опорных колонн 6 и 7 в вертикальной плоскости на угол о(./при о{.90 эти колонны фиксируются пальцами 48 к noHtoHy 1, двухштоковые гидроцилиндры 12 отключаются и с помощью только штоков гидродомкратов 5 осуществляют процедуру наращивания); h - на фиг.З ход силовой колонны 2 в портале 3 R - на фиг.З радиус вращения осевого шарнира на. оси 8. 71 Плавучая платформа работает следующим образом. После прибытия плавучей платформы на место эксплуатации.отсоединяют пластины 46, посредством пальцев 48 на опорных колоннах 6 от несущего понтона 1, а также двухштоковый гидроцилиндр 12 от силовой колонны 2. Подсоединявзт тяги 19 к паре рычагов 17 и 18 и разворачивают задние опорные колонны 6 на угол 60 до момента соприкосновения с упорами 56. Разворот осуществляют посредствен на высоту h площадки 21 на силовой колонне 2 с помощью штоков г ЛроЯО «кратоа 5 (фиг.2-4), взаимодействующих с зубчатыми захватами рейки Л. В ;этом положении все три К1олонны6у|(ут находит ься симметрично .относительно доуг друга, т.е. под углом 120. Далрё приступайт к опусканию опорных коломн 6 и 7 т.е. к повороту их в вертикадъ-. ных плоскостях на осях 15. С этой опускают гидродомкратами 5 силову« колонну 2 вниз до koHi«a т.е. в исходное положение (фиг.1). Соединяют штоки гидроцилиндров 12, с колонной силовой 2, путем ввхэда их в пазы 13 (фиг.З) и отсоединяют фиксатор 39 от подвесной штанги 38j т.е. обеспечивают свободный проход итан.ги 38 в вертикальном отверстии несущего понтона 1. Движением силовой колонны 2 вверх с помощью тех же гидрЬдомк атов 5 портала 3 осуществляют перемещение обоймы 10 вверх, воздействия кулисных рычагов 11 на осевые шарниры 9 кронштейнов, роль которых выполняют оси 15 задних опорных колонн 6 и глухое соединение 57 передней опорной колонны 7. Вследствие этого опорные колонны 6 и 7 поворачиваются «а угол 1, величина которого прямо пропорциональна высоте подъема обоймы 10 (фиг.З). При этом При отсутствии воздействия на емкости 50, т.е. без изменения в них количества жидкости . 51, происходит некоторый подъем всех конструкций над уровнем моря, вслед ствие выталкивающей силы, действующей на погружаемые емкости 50 опорных,колонн 6 и 7. В зависимости от конкретных условий подъем конструкций можно приостановить, увеличив количество балластной жидкости 51. Промежуточные глы о установки опорный колонн 6 и 7 необходимые в случае повышения остойчивости платформы, фиксируются фиксаж тором 39 через подвесную штангу 38. 798 При необходимости обеспечения вертикального положения этих колонн,, оно автоматически фиксируется путем взаимодействия штоков гидроцилиндров 12 с вертикальными кронштейнами 1 k. Затем приступают к опусканию балласта 30 на дно моря путем удлинения тяг с помощью крана 0 и замков 22 и 23« В момент касания донным балластом 30 дна моря возникает дополнительная подъемная сила, равная силе тяжести донного балласта 30 (без учета массы тяг 2it), котЬрая обуславливает соответствующее напряжение в тягах 2k. При последующем наращивании тяг 2 эта сила обуславливает подъем всей конструкции (кроме балласта 30 и тяг 2) над уровнем моря на высоту Н (фиг.7)J при заглублении колонн на глубину Н. При необходимости может быть получено (дополнительное :уси:лие натяжения тяг продувки емкостей 50, т.е. удаления из них жид-кости 51 или выполнена операция противоположного характера. На этом заканмивается подготовка плавучей плат4|0рмы (т.е. работа) к последующей экс луатации в качестве того или иного объекта (буровая платформа, разведочная и т.д. и т.п.). Наличие серьг 29 и шарового шарнира 32 и 33 обеспечивает свободное приспособление донного балласта 30 к рельефу моря без и зги бающего воздействия на тяги 2k той же цели служит и конусная выемка 55, с которой выполнено днище балласта 30 (фиг.8). Наличие шариковой опоры 35 (фиг.9) исключает возможность скручивания друг с другом тяг 2, при разворотах платформы в горизонтальной плоскости. Обслуживающий персонал по трапу 58, переходнику 3 и шихте kk может попадать в спецпомещение 45 а через шлюз 53 - в толщу воды и на дно моря (для акванатов). Демонтаж платформы осуществляется при выполнении вышеперечисленных операций в обратном порядке. При положении, показанном на фиг.1, платформа может быть использована для посадки на дно моря крупногабаритных объектов и для подъема затонувших объектов по техно логии, описанной в вышеуказанной зая ке.. При этом донный балласт 30 от тя 2 отсоединяется и возникающая подъе ная сила несущего понтона 1 и емкости 50 используемся для этой цели. 1 Применение изобретения позволяет низить металлоемкость по сравнению с существующими конструкциями платормы . Формула изобретения 1.Плавучая платформа, содержащая несущий понтон, подъемник с силовой колонной и поворотные в вертикальной плоскости опорные колонны с кронштейнами, отличающаяся тем, что, с целью упрощения конструкции путем применения одного подъемника для силового воздействия на все опорные колонны, кронштейны соединены между собой обоймой с .кулисными рычагами внутри которой свободно пропущена силовая колонна, причем обойма снабжена фиксатором,- поочередно взаимодействующим, с силовой колонной и несущим понтоном. 2.Платформа по п.1, от л и ч аю,щ а я с я тем, что, с целью повышения скорости и безопасности перемещения по акватории моря за счет уменьшения лобового сопротивления, задние опорные колонны соединены с несущим понтоном с возможностью вращения в горизонтальной плоскости на вертикальных осях, снабженных приводами вращения, 3. Платформа по п.2, о т л и ч аю щ а я с я тем, что привод вращения выполнен в виде укрепленной на вертикальной оси пары рычагов, противоположные концы которых с возможностью -. поочередного подсоединения посредством гибкой тяги кинематически связаны с силовой колонной. k. Платформа по п.. 1,oтличaю щ а я с я тем, что,, с целью обеспечения автономности действия, силовая колонна снабжена механизмом перехвата, взаимодействующим с тягами, на которых укреплен донНый балласт. Источники информации, принятые во внимание при экспертизе 1.Патент США № 2939291 , кл. 11+-0.5, I960. 2.Авторское свидетельство СССР (f , кл. Е 02 В 17/00, 1977.
ч,
«г
/
Пг
г
Zif
фаг.б
(ffut.S
фаг. W
