(Л
С

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулирования скорости электрического рабочего вала | 1971 |
|
SU545057A1 |
| Способ управления вентильным электродвигателем со звеном постоянного тока при изменении знака его момента и устройство для его осуществления | 1983 |
|
SU1124408A1 |
| МАШИННО-ВЕНТИЛЬНЫЙ КАСКАД | 1971 |
|
SU312343A1 |
| Реверсивный вентильный электродви-гАТЕль | 1979 |
|
SU813608A1 |
| Машинно-вентильный каскад | 1977 |
|
SU731546A1 |
| Вентильный электропривод | 1984 |
|
SU1262679A2 |
| УСТРОЙСТВО для МОДЕЛИРОВАНИЯ ТУРБИН | 1970 |
|
SU264811A1 |
| Электропривод переменного тока | 1987 |
|
SU1476590A1 |
| Устройство для управления реверсивным вентильным электродвигателем | 1981 |
|
SU1001415A1 |
| Электропривод переменного тока | 1988 |
|
SU1615856A1 |


Способ торможения асинхронного вентильного каскада. Использование: электроприводы грузоподъемных механизмов с изменяющимся в широких пределах статическим моментом. Сущность изобретения: для торможения приводят роторный выпрямитель в инверторный, а инвертор - в выпрямительный режимы. Регулируют интенсивность торможения, контролируют знак напряжения управления. Перевод выпрямителя и инвертора в указанные режимы осуществляют при изменении знака напряжения управления на противоположный. Осуществляют регулирование угла опережения роторного выпрямители по соответствующему загону. Повышается коэффициент мощности и надежность. 4 ил,
Изобретение относится к области электротехники, а именно к автоматизированному электроприводу, и может быть использовано в электроприводах грузоподъемных механизмов, которые работают в условиях изменения статического момента в широких пределах.
Известен способ торможения асинхронного вентильного каскада, заключаю- . щийся в том, что роторный выпрямитель переводят в инверторный режим с углом опережения Д сетевой выпрямитель - в выпрямительный режим с углом запаздывания а, а интенсивность торможения изменяют путем регулирования угла запаздывания сетевого выпрямителя. Отмеченный способ торможения предполагает работу с постоянным углом опережения роторного выпрямителя при непрерывном изменении величины угла запаздывания сетевого выпрямителя.
Наиболее близким к предложенному по технической сущности и достигаемому результату является способ торможения асинхронного вентильного каскада, роторная цепь которого содержит последовательно включенные роторный и сетевой выпрямители с системой управления, заключающийся в том, что переводят роторный выпрямитель в инвертоГрный режим с углом опережения Д а сетевой выпрямитель в выпрямительный режим с углом запаздывания а, изменяя величину угла запаздывания реvj
о
х О xj
гулируют интенсивность торможения по заданной программе.
Недостатком указанного способа торможения являются недостаточно высокие надежность и энергетические показатели электропривода. Это объясняется следующим. Предположим, что торможение осуществляется с углом опережения / 60 эл. град, так как такой угол обеспечивает работу в широком диапазоне моментов нагруз- ки. В этом случае максимальные коэффициенты мощности сетевого и роторного выпрямителей будут иметь недостаточно высокие значения, что приведет к снижению и средневзвешенного коэффициента мощности электропривода за время торможения. Указанный недостаток будет вызывать повышенный расход электроэнергии. Отсутствие контроля за углом коммутации роторного выпрямителя может приводить к нарушению режима инвертирования, что снижает надежность тормозных процессов. Переключение в тормозной режим в функции рассогласования по скорости не позволяет контролировать угол управления сетевым выпрямителем, что также снижает надежность торможения.
Целью изобретения является повышение надежности и улучшение энергетических показателей электропривода.
Поставленная цель достигается тем, чта в известном способе торможения асинхрон- ного вентильного каскада, снабженного роторным и сетевым выпрямителями с системой управления, при котором роторный выпрямитель переводят в инверторный режим с углом опережения Д а сетевой выпрямитель - в выпрямительный режим с углом запаздывания а, изменяя величину угла запаздывания, регулируют интенсивность торможения по заданной программе, контролируют знак напряжения на выходе системы управления и при его изменении на противоположный осуществляют указанный перевод роторного и сетевого выпрямителей в упомянутые режимы и дополнительно изменяют угол опережения роторного выпрямителя по закону
Ј arcsin
где т,- заданный момент электродвигате- ля;
д - угол восстановления запирающих свойств управляемого вентиля.
Перевод роторного выпрямителя в инверторный режим работы в функции знака выходного сигнала системы управления, управление углом опережения роторного выпрямителя по арксинусоидальному закону в функции заданного момента электродвигателя позволяет минимизировать угол опережения роторного выпрямителя при изменении момента нагрузки в широких пределах и снизить потери электроэнергии в процессе торможения, что повышает надежность и энергетические показатели электропривода.
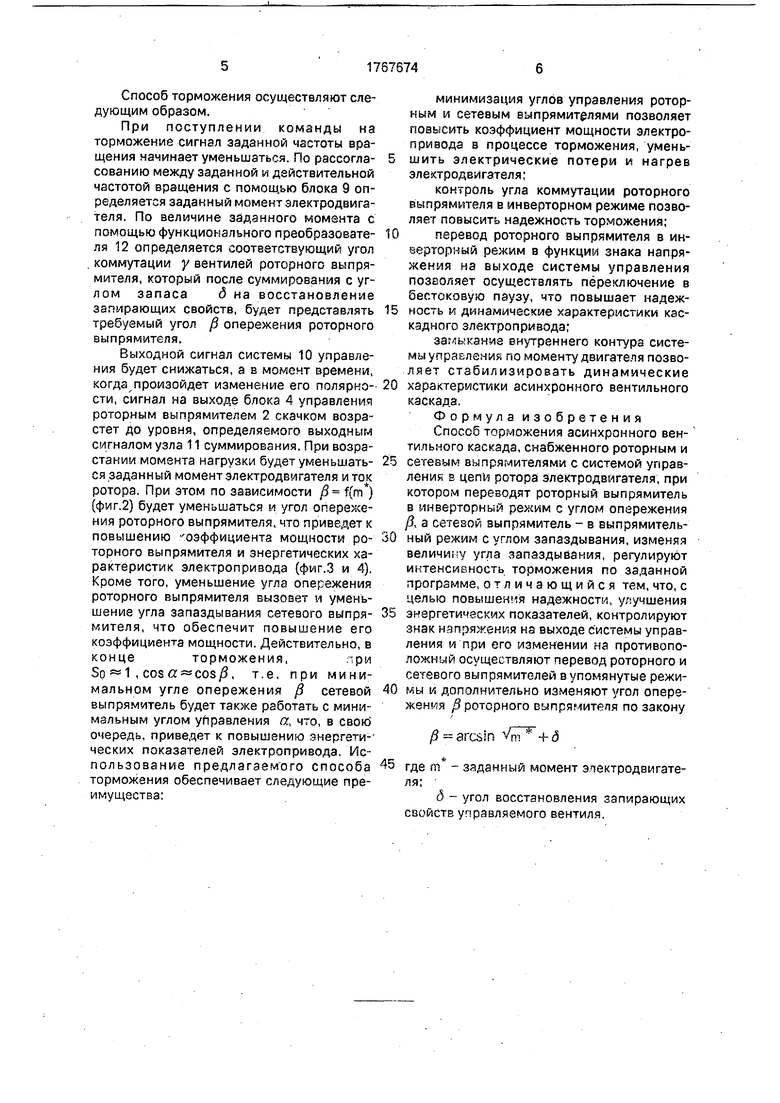
На фиг.1 приведена схема электропривода, реализующая способ торможения; на фиг.2 показана зависимость угла опережения роторного выпрямителя от заданного момента электродвигателя; на фиг.З и 4 представлены векторные диаграммы асинхронного вентильного каскада в режиме торможения.
л
На фиг.З и фиг.4 обозначено: li -.гок статора, L.- намагничивающий ток; г - приведенный ток ротора; Oi, Ё1 - напряжение и ЭДС статора, Ё2 - ЗДС ротора, iirijh x 1 - падения напряжения на активном и индуктивном сопротивлениях статора; p,(pi - фазовые углы между напряжением и током статора и между ЭДС и током ротора; / -угол опережения роторного выпрямителя.
На схеме изображены асинхронный электродвигатель 1, роторная цепь которого содержит последовательно включенные роторный выпрямитель 2 и сетевой выпрямитель 3 с соответствующими блоками 4 и 5 импульсно-фазового управления, сглаживающий дроссель 6 и датчик 7 выпрямленного тока, согласующий трансформатор 8, который соединен с входом сетевого выпрямителя 3, последовательно соединенный блок 9 заданного момента, вход которого подключен к источнику заданной частоты вращения и система 10 управления,, выход которой соединен с входами блоков 4 и 5 управления, блок 11 суммирования, на один вход которого через функциональный преобразователь 12 подключен выходной сигнал блока 9 заданного момента, на другой - сигнал, пропорциональный углу восстановления запирающих свойств, а выход блока 11 суммирования соединен с другим входом блока 4 управления роторного выпрямителя 2, датчик 13 частоты вращения, выход которого подключен ко второму входу блока 9 заданного момента и блок 14 текущего момента электродвигателя, один вход которого соединен с выходом блока 11 суммирования, другой с выходом датчика 7 выпрямленного тока ротора, а выход блока 14 подключен ко второму входу системы 10 управления.
Способ торможения осуществляют следующим образом.
При поступлении команды на торможение сигнал заданной частоты вращения начинает уменьшаться. По рассогласованию между заданной и действительной частотой вращения с помощью блока 9 определяется заданный момент электродвигателя. По величине заданного момента с помощью функционального преобразователя 12 определяется соответствующий угол коммутации у вентилей роторного выпрямителя, который после суммирования с уг- лом запаса б на восстановление запирающих свойств, будет представлять требуемый угол / опережения роторного выпрямителя.
Выходной сигнал системы 10 управления будет снижаться, а в момечт времени, когда произойдет изменение его поляркости, сигнал на выходе блока 4 управления роторным выпрямителем 2 скачком возрастет до уровня, определяемого выходным сигналом узла 11 суммирования. При возрастании момента нагрузки будет уменьшаться заданный момент электродвигателя и ток ротора. При этом по зависимости (m) (фиг.2) будет уменьшаться и угол опережения роторного выпрямителя, что приведет к повышению оэффициента мощности роторного выпрямителя и энергетических характеристик электропривода (фиг.З и 4). Кроме того, уменьшение угла опережения роторного выпрямителя вызовет и уменьшение угла запаздывания сетевого выпрямителя, что обеспечит повышение его коэффициента мощности. Действительно, в концеторможения,-;ри
So «1 , cos a cos/5, т.е. при минимальном угле опережения /J сетевой выпрямитель будет также работать с минимальным углом управления а, что, в свою очередь, приведет к повышению знергеш- ческих показателей электропривода. Использование предлагаемого способа торможения обеспечивает следующие преимущества:
минимизация углов управления роторным и сетевым выпрямителями позволяет повысить коэффициент мощности электропривода в процессе торможения, уменьшить электрические потери и нагрев электродвигателя;
контроль угла коммутации роторного выпрямителя в инверторном режиме позволяет повысить надежность торможения;
перевод роторного выпрямителя в ин- еерторный режим в функции знака напряжения на выходе системы управления позволяет осуществлять переключение в бестоковую паузу, что повышает надежкость ы динамические характеристики каскадного электропривода;
за.мыканиз внутреннего контура системы упра&лений по моменту двигателя позволяет стабилизировать динамические
характеристики асинхронного вентильного каскада.
Формула изобретения Способ торможения асинхронного вентильного каскада, снабженного роторным и
сетевым выпрямителями с системой управлений в цепи ротора электродвигателя, при котором переводят роторный выпрямитель в инверторный режим с углом опережения Д а сетевой выпрямитель - в выпрямительный режим с углом запаздывания, изменяя величину угла запаздывания, регулируют интенсивность торможения по заданной программе, отличающийся тем, что, с целью повышения надежности, улучшения
энергетических показателей, контролируют знак напряжения на выходе системы управления и при его изменении на противоположный осуществляют перевод роторного и сетевого выпрямителей в упомянутые режимы к дополнительно изменяют угол опережения / роторного выпрямителя по закону
0 arcsin (5
где m - заданный момент эпектродвигате- ля;
д - угол восстановления запирающих свойств управляемого вентиля.
СО
8
Фиг.1
60
0,25
Фиг2
075
ПГ
,
агЪ
ФигЛ
30 35 40 45 50
| Онищенко Г.Б | |||
| Асинхронный вентильный каскад, М., Энергия, 1967, с.62-64 | |||
| Чермалых В.М., Родькин Д.И., Каневский В.В | |||
| Системы электропривода и автоматики рудничных стационарных машин и установок | |||
| М., Недра, 1976 | |||
| Способ получения суррогата олифы | 1922 |
|
SU164A1 |
