фазными выходами инвертора 4 и общей точкой выводов выпрямленного тока выпрямителей 5,3 включен управляемый вентильный преобразователь (УВП) 7. Угол управления вентилями инвертора 4 установлен постоянным, а угол управления вентилями УВП 7 изменяют в диапазоне от 0 до 180 , при этом в
диапазоне углов от 0 до 90° УВП 7 работает в инверторном режиме, а в диапазоне углов от 90 до 180° - в выпрямительном режиме. Напряжение УВП 7 изменяют до величины, равной половине напряжения на выходе выпрямителя 3 при неподвижном роторе, 2 з.п. ф-лы, 4 ил.


| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод переменного тока | 1986 |
|
SU1431027A1 |
| Электропривод переменного тока | 1986 |
|
SU1379933A2 |
| Электропривод переменного тока | 1985 |
|
SU1272463A1 |
| Электропривод переменного тока | 1990 |
|
SU1725360A1 |
| Способ управления асинхронным двигателем с фазным ротором | 1987 |
|
SU1408516A1 |
| Стенд для обкатки и испытания двигателя внутреннего сгорания | 1980 |
|
SU1002875A2 |
| АСИНХРОННЫЙ ВЕНТИЛЬНЫЙ КАСКАД | 2007 |
|
RU2342767C1 |
| Электропривод стенда для испытания механических передач | 1982 |
|
SU1107243A1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2002 |
|
RU2237344C2 |
| Электропривод переменного тока | 1983 |
|
SU1100705A1 |
Изобретение относится к электротехнике и может быть использовано в судовом и металлургическом оборудовании. Целью изобретения является уменьшение потерь электроэнергии путем снижения потребления реактивной мощности из сети переменного тока при любых значениях скольжения ротора двигателя. Электропривод переменного тока содержит асинхронный двигатель 1 с включенными в его роторную цепь последовательно соединенными мостовым выпрямителем 5, ведомым сетью инвертором 4 и мостовым выпрямителем 3. Трехфазный вход мостового выпрямителя 5 чепез параметрический стабилизатор 6 переменного тока подключен к выводам обмотки статора асинхронного двигателя 1. Между трехфазными выходами инвертора 4 и общей точкой выводов выпрямленного тока выпрямителей 5, 3 включен управляемый вентильный преобразователь (УВП) 7. Угол управления вентилями инвертора 4 установлен постоянным, а угол управления вентилями УВП 7 изменяют в диапазоне от 0 до 180°, при этом в диапазоне углов от 0 до 90° УВП 7 работает в инверторном режиме, а в диапазоне углов от 90 до 180° - в выпрямительном режиме. Напряжение УВП 7 изменяют до величны, равной половине напряжения на выходе выпрямителя 3 при неподвижном роторе. 2 з.п. ф-лы, 4 ил.
1
Изобретение относится к электротехнике, а именно к электроприводу переменного тока на базе асинхронно го двигателя с фазным ротором, и может быть использовано, например, в судовом и металлургическом электрооборудовании, требующем регулирования момента и скорости с высокими энергетическими показателями, 1
Цель изобретения - уменьшение потерь электроэнергии путем снижения потребления реактивной мощности из сети переменного тока при любых значениях скольжения ротора двигателя.
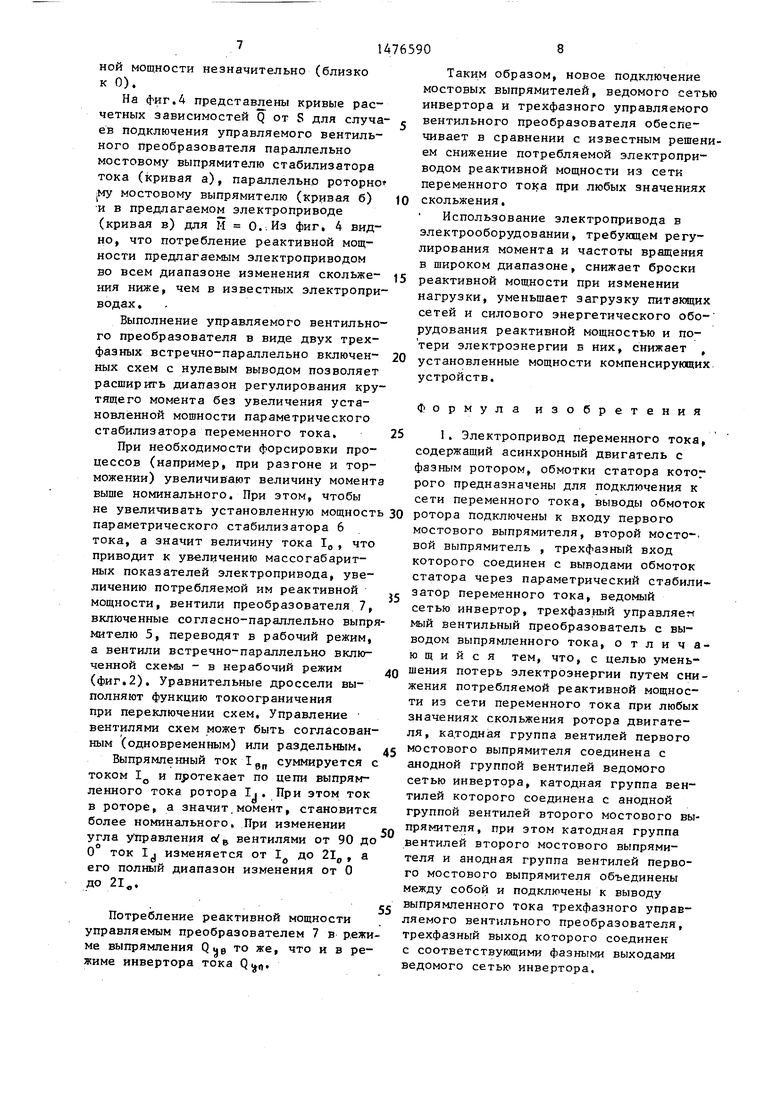
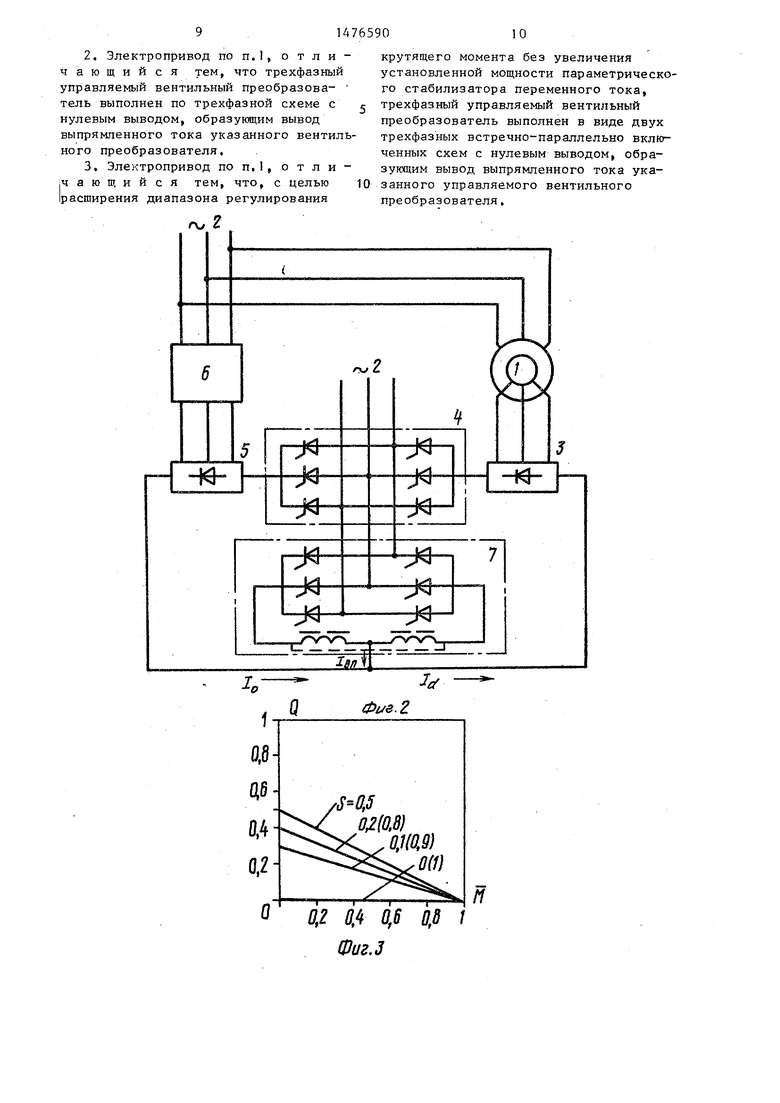
На фиг.1, 2 представлены функциональные схемы электропривода переменного тока с различным выполнением управляемого вентильного преобразователя; на фиг.З - расчетные зависимости потребления электроприводом реактивной мощности в функции момента; на фиг.4 - кривые расчетных зависимостей потребляемой электроприводами реактивной мощности в функции скольжения для М 0.
Электропривод переменного тока содержит асинхронный двигатель 1 (фиг.1,2) с фазным ротором, обмотки статора которого предназначены для подключения к сети 2 переменного тока, выводы обмоток ротора подключены к входу первого мостового выпрямителя 3, катодная группа вентилей которого соединена с анодной группой вентилей ведомого сетью инвертора 4. Катодная группа вентилей инвертора 4 соединена с анодной группой вентилей второго мостового выпрямителя 5, трехфазный вход которого связан с выводами обмоток статора через параметрический стабилизатор 6 переменного
тока. Катодная группа вентилей второго мостовогЧ) выпрямителя 5 соединена, с анодной группой вентилей первого мостового выпрямителя 3 и с выводом выпрямленного тока управляемого вентильного преобразователя 7, трехфазный выход которого соединен с соответствующими фазными выходами ведомого сетью инвертора 4.
Управляемый вентильный преобразователь 7 может быть выполнен по трехфазной схеме с нулевым выводом, как это показано на фиг.1, и в виде
двух трехфазных встречно-параллельно включенных схем с нулевым выводом, как это показано на фиг.2.
Электропривод переменного тока работает следующим образом.
0 Управление координатами электрог. привода (частотой вращения и моментом) осуществляют изменением величины стабилизированного тока 1, опре.- деляющего амплитуду переменного тока
5 в роторных обмотках двигателя 1 при питании статорных обмоток от сети 2 переменного тока и наличии соответствующих контуров регулирования. Это . изменение происходит благодаря ответ0 влению части тока ,,„ выпрямленного мостом 5 тока 10 параметрического стабилизатора 6 переменного тока, величина которой определяется углом управления вентилей управляемого преобразователя 7.
5
Сумма выпрямленного напряжения (ЭДС ротора) Vj на выходе мостового выпрямителя 3 и напряжения на выпрямителе 5 VCT постоянна по величине и равна напряжению VH(1 на входе нерегулируемого инвертора 4 с фиксиг рованным углом управления вентилями:
VHH VJ + VЭто приводит к тому, что при нии скольжения ротора S от 0 (а значит Vj от 0 до Vj
Wave
напряжение Ve изменяется от
VMM ДО 0.
Так как мостовая схема нерегулируемого инвертора 4 симметрична, то при ее включении, как на фиг.1, следует рассматривать анодную и катодную группы вентилей инвертора 4 раздельно и определить на них напряжения.
VHH, - иик - Yf - -f, CO где VJH - напряжение на выходе мостового выпрямителя 3 при неподвижном роторе (, VCT О) двигателя 1.
Угол управления вентилями Ян ий- вертора 4 установлен постоянным и соответствует ни VЈJM , а угол управления Во вентилями преобразователя 7 изменяют в диапазоне от 0 до 180°, причем при 0 (3 р 90° уп- равляемый преобразователь 7 работает в инверторном, а при 90е Ј /Зр 180° в выпрямительном режиме.
Напряжение на преобразователе 7 изменяют до величины не более VjH/2, так как при его работе в выпрямительном режиме сумма противо-ЭДС анодной группы вентилей инвертора 4 VHHA и управляемого преобразователя 7 Vun
не должна превышать максимального
напряжения на выходе роторного выпрямителя 3 - VJH, а в инверторном режиме, для случая Vj 0, их алгебраическая сумма должна быть равна нулю, иначе в первом случае роторный вы- прямитель 3 закрывается для прохождения через него тока, а во втором - ток будет протекать через вентили моста 3, не участвующие в коммутационном процессе.
Регулирование момента двигателя 1 осуществляют следующим образом. Если сумма противо-ЭДС катодной группы вентилей инвертора 4 VH(1(( и управляемого преобразователя 7 V,,n больше напряжения на мостовом выпрямителе 5 VCTI.то весь ток 1„ проходит в цепь выпрямленного тока ротора (), при этом ток в обмотках ротора, а значит, момент двигателя 1 максимальны.
Для уменьшения I,, т.е. ответвления части тока 1д стабилизатора 6 в цепь управляемого преобразователя 7,
5
5
0 5
0
5
о 5
необходимо, чтобы сумма этих противо-ЭДС была меньше VCT .
Так как катодная группа вентилей инвертора 4 обеспечивает постоянную противо-ЭДС V Ник VdH/2, для регули рования тока 1„„ при VtT VjH/2 преобразователь 7 работает в выпрямительном режиме (1цп 1Вп) причем обеспечивают выполнение условия VCT
VH«K V а при VCT VJh/2 npe образователь 7 работает в инверторном
режиме (Ian -ип) и обеспечивают выполнение условия + V(.n,
Работая в соответствующем режиме и изменяя угол управления /Зр изменяют ток lyn j а значит момент двигателя Т,
Для стабилизации величины момента поддерживают неизменным стабилизированный ток в обмотках ротора, т.е Ij, при изменении скольжения S ротора двигателя 1. Для этого в системе упг равления электроприводом с контуром регулирования тока Ij угол р изменяют так, чтобы ток lun поддерживать постояннымв при этом управляемый преобразователь 7 переводится в режим обеспечивающий постоянство алгебраической суммы напряжений V
VДля стабилизации частоты вращения двигателя 1 на заданном уровне ток 1, а значит, момент изменяют в соответствии с изменением момента нагрузки. Для этого в системе управления электроприводом с контуром регулирования скорости угол изменяют так, чтобы изменение тока обеспечивало требуемое изменение Ij,
Определим реактивную мощность, потребляемую электроприводом из сети.
Выпрямленный ток стабилизатора 6 тока определяют как 10 Ј. I , , где I - выпрямленный ток ротора, при котором крутящий момент, развиваемый двигателем 1, номинальный, Ј - постоянный коэффициент ( Ь I).
Ток управляемого преобразователя 7:
ст ник
о Ij
fl
JH
(2)
Максимальные напряжения управляемого преобразователя 7 Vl(.n и нерегулируемого инвертора 4 УЈ„, выраженные через базовое напряжение VJH , имеют вид
v; . vdH(v
о
нид
Lla 2
),
(3)
где oi , jj - постоянные коэффициенты
( Ь 1, у ь 1). Для схемы включения вентилей, как на фиг. 1 , оЈ У .
Тогда реактивная мощность, потребляемая преобразователем 7, с учетом (2) и (3):
WsinPf
Qr
, М -f7
«I
e)H
cosjpe
Напряжение на анодной и катодной группах вентилей инвертора 4:
1О
МИД
ник
НИЛ
cosf,,
. Ј&
т -(j - f
2 cospH,
т Из. (1) и (5) следует, чтооЈсозВ„
I.
Текущее значение напряжения управляемого преобразователя 7:
v - vd - v;,c°sp.
Тогда из (4), сучетом (1), (3) и (6):
(5) 20 где Va Vj/VaH, ij Ij/I
Относительное значение Vj равно скольжению (Vj т - относительному значен двигателя l(Ij М),
25
(6)
Кроме того, полагая, чт , нагрузки не превышает номи Ј принимается равным 1; пол 0, что возможно лишь тео 30 из выражения (5) следует, а значит у 1.
ijn
«fl
(JK
- I,) -IJ1
ч- -
Реактивная мощность, потребляемая катодной группой вентилей инвертора
4:
ник
Т0 VHHK sinpn
н- Ч РиСв)
Реактивная мощность, потребляемая анодной группой вентилей инвертора 4:
НИА
V sinph. (9)
Реактивная мощность, потребляемая инвертором 4 и управляемым преобразователем 7, с учетом (7), (8) и (9):
voL Vji.
Q - Q««K+ Q4n (ij4 + l3) --2 vsin(H + -id)Jlr- x
«
765906
Так как стабилизатор 6 выполняется таким, что генерируемая им в сеть реактивная мощность равна реактивной мощности намагничивания, потребляемой двигателем 1 из сети, реактивная мощность, потребляемая из сети электроприводом в целом, определяется выражением (10).
Полагая базовым значением реактивной мощности Q„ VJM , из (10) выражение для удельной реактивной мощности ( Q/QH, потребляемой электроприводом из сети, принимает вид:
т ч ЈL§iSJ J.
10
15
+ V
i /2vsL Ч2
т -(j - f
(П)
где Va Vj/VaH, ij Ij/I
ch,
Относительное значение напряжения Vj равно скольжению (Vj S)t а тока т - относительному значению момента двигателя l(Ij М),
Кроме того, полагая, что момент нагрузки не превышает номинального, Ј принимается равным 1; полагая рц 0, что возможно лишь теоретически, из выражения (5) следует, что si 1, а значит у 1.
С учетом принятых условий из (11) удельная реактивная мощность, потребляемая электроприводом из сети,
определяется выражением:
Q kl - М) -Jl - (2S - 0е (12)
0
5
0
5
Из выражения (12) следует, что электропривод при номинальной нагрузке (М 1) при любой частоте вращения (скольжении) реактивной мощности из сети не потребляет, т.е. Q(M 1, S var) О. При S 0 и S 1 электропривод при любой нагрузке также не потребляет реактивной мощности Q (М var, S - О и 1) 0.
Расчетные зависимости Q как функции момента К для фиксированных значений скольжения в диапазоне от 0 до 1 представлены на фиг.З.
Из проведенного анализа потребления электроприводом реактивной мощности следует, что при любом скольжении ротора рост момента нагрузки приводит к снижению потребления реактивной мощности, кроме того, при малых и больших скольжениях S при любом моменте нагрузки потребление реактивной мощности незначительно (близко к 0).
На фиг.4 представлены кривые расчетных зависимостей Q от S для случа- ев подключения управляемого вентильного преобразователя параллельно мостовому выпрямителю стабилизатора тока (кривая а), параллельно роторно ;му мостовому выпрямителю (кривая б) и в предлагаемом электроприводе (кривая в) для М О. Из фиг, 4 видно, что потребление реактивной мощности предлагаемым электроприводом во всем диапазоне изменения скольже- ния ниже, чем в известных электроприводах .
Выполнение управляемого вентильного преобразователя в виде двух трехфазных встречно-параллельно включен- ных схем с нулевым выводом позволяет расширить диапазон регулирования крутящего момента без увеличения установленной мощности параметрического стабилизатора переменного тока,
При необходимости форсировки процессов (например, при разгоне и торможении) увеличивают величину момента выше номинального. При этом, чтобы не увеличивать установленную мощность параметрического стабилизатора 6 тока, а значит величину тока 10, что приводит к увеличению массогабаритных показателей электропривода, увеличению потребляемой им реактивной мощности, вентили преобразователя 7, включенные согласно-параллельно выпрямителю 5, переводят в рабочий режим, а вентили встречно-параллельно включенной схемы - в нерабочий режим (фиг.2). Уравнительные дроссели выполняют функцию токоограничения при переключении схем. Управление вентилями схем может быть согласованным (одновременным) или раздельным.
Выпрямленный ток 1еп суммируется с током IQ и протекает по цепи выпрямленного тока ротора I,. При этом ток в роторе, а значит.момент, становится более номинального. При изменении угла управления в вентилями от 90 до О ток Ij изменяется от 1Q до 2I0, a его полный диапазон изменения от О до 21в.
Потребление реактивной мощности управляемым преобразователем 7 в режиме выпрямления Que то же, что и в режиме инвертора тока Q.
с ю 15
20 25
0
5
Таким образом, новое подключение мостовых выпрямителей, ведомого сетью инвертора и трехфазного управляемого вентильного преобразователя обеспечивает в сравнении с известным решением снижение потребляемой электроприводом реактивной мощности из сети переменного тока при любых значениях скольжения,
Использование электропривода в электрооборудовании, требующем регулирования момента и частоты вращения в широком диапазоне, снижает броски реактивной мощности при изменении нагрузки, уменьшает загрузку питающих сетей и силового энергетического оборудования реактивной мощностью и потери электроэнергии в них, снижает , установленные мощности компенсирующих устройств.
Формула изобретения
3,Электропривод по п,1, о т л и - .чающийся тем, что, с целью (расширения диапазона регулирования
л
го
Q
лГ-де 0,2(0,8) Q.W® 0(1)
0,2 0,4 0,6 Цд 1 Шиг.З
крутящего момента без увеличения установленной мощности параметрического стабилизатора переменного тока, трехфазный управляемый вентильный преобразователь выполнен в виде двух трехфазных встречно-параллельно включенных схем с нулевым выводом, образующим вывод выпрямленного тока указанного управляемого вентильного преобразователя,
Фиг.2
II
О 0,2 Ofi Цб 0,61 Фиг. 4
| Электропривод переменного тока | 1986 |
|
SU1379933A2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электропривод переменного тока | 1986 |
|
SU1431027A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| г | |||
