Uynp
«v
4 4 Ы
Изобретение относится к сельскохозяйственному машиностроению, в частности к автоматизации вождения машинно-тракторных агрегатов.
Известны механизмы поворота гусеничных тракторов, выполненные в виде муфт поворота или планетарных редукторов, Эти механизмы позволяют осуществлять сило-вой поворот гусеничных тракторов путем размыкания муфт поворота или расторма- живанмя солнечной шестерни планетарного механизма поворота.
Недостатком этих механизмов поворота является зависимость радиуса поворота трактора от тягового сопротивления сельскохозяйственной машины, агрегатируемой с трактором. Так, если тяговое сопротивление большое, то даже незначительное размыкание муфты поворота приводит к остановке отключаемой гусеницы и к крутому повороту трактора вокруг нее. Если тяговое сопротивление отсутствует, то для поворота трактора необходимо не только полностью отключить муфту поворота, но и остановить гусеницу при помощи тормоза,
Зависимость радиуса поворота трактора от тягового сопротивления усложняет управление механизмом поворота.
Наиболее близким по технической сущности к заявляемому устройству является механизм поворота гусеничного трактора Т- 150, выбранный в качестве прототипа. Этот механизм поворота состоит из раздельных по бортам трактора коробок перемены передач, переключаемых без разрыва потока мощности, т.е. без остановки трактора, и обеспечивает кинематический поворот трактора путем включения различных передач по бортам трактора, например, первый и второй, второй и третий и т,д, В этом случае гусеницы трактора перематываются с различными скоростями, а трактор движется по дуге окружности, радиус которой зависит только от соотношения передач бортов трактора и не зависит от тягового сопротивления агрегатируемой машины.
Недостатком известного устройства является применение ручного труда с участием тракториста, отсутствие автоматизации в управлении гусеничным трактором Т-150.
Движение трактора Т-150 по дуге окружности радиусом 13 м достигается при соотношениях передач по бортам трактора 1-2,2-3,3-4. Требуемое соотношение определяется передачей прямолинейного движения трактора (1, 2, 3 или 2. 3, 4). Отсутствие автоматического выбора необходимого соотношения передач по бортам трактора не позволяет автоматизировать его вождение.
Целью изобретения является автоматизация управления траекторией движения гу- сеничного трактора, содержащего в качестве механизма поворота раздельные
по бортам коробки перемены передач, переключаемые без разрыва потока мощности и оборудованные исполнительными элементами.
Поставленная цель достигается тем, что
0 механизм поворота гусеничного трактора, содержащий раздельные по бортам коробки перемены передач, переключаемые без разрыва потока мощности, а также исполнительные элементы коробок перемены
5 передач, согласно изобретению, дополнительно снабжен электронным блоком управления, состоящим из аналого-цифрового преобразователя (АЦП), задатчика передачи прямолинейного движения трактора (ЗППД)
0 и запоминающего устройства (ЗУ), причем адресные входы ЗУ соединены с выходами АЦП и ЗППД, выходы ЗУ соединены с входами исполнительных элементов (ИЭ) коробок перемены передач (КПП) двух бортов трак5 тора, а вход АЦП является управляющим входом механизма поворота,
Сопоставительный анализ с прототипом показывает, что предлагаемый механизм поворота гусеничного трактора
0 отличается наличием электронного блока управления, содержащего новые элементы и новые связи между ними.
Таким образом, заявляемый механизм поворота соответствует критерию изобрете5 ния новизна.
Сравнение предлагаемого решения с другими техническими решениями показывает, что электронный блок управления с АЦП и ЗУ широко известен. Однако при их
0 введении в указанной связи с остальными элементами схемы в данный механизм поворота вышеуказанные элементы проявляют новые свойства, которые приводят к автоматизации выбора требуемого сочета5 ния передач по бортам трактора в зависимости от заданной передачи прямолинейного движения и требуемой кривизны траектории трактора, определяемой входным управляющим напряжением траекторного
0 рассогласования, Это позволяет сделать вывод о соответствии технического решения критерию существенные отличия,
Ка чертеже представлена блок-схема механизма поворота гусеничного трактора,
5 Механизм содержит электронный блок управления 1 с последовательно соединенными элементами схемы: АЦП 2, ЗППД 3 и ЗУ 4, а механическая часть механизма поворота состоит из ИЭ 5 и 6, КПП 7 и 8, гусениц 9 и 10, тракторного двигателя 11.
Адресные входы ЗУ 4 соединены с выходами АЦП 2 и ЗППД 3, а выходы ЗУ 4 соединены с входами ИЭ 5 и 6. Тракторный двигатель 11 кинематически соединен через раздельные КПП 7 и 8 с гусеницами 9 и 10. Управление механизмом поворота и соответственно траекторией движения трактора осуществляется изменением управляющего напряжения на входе АЦП 2,.
Механизм поворота гусеничного трактора работает следующим образом.
При отсутствии управляющего напряжения на входе АЦП 2 на его выходе будет двоичный код, соответствующий прямолинейному движению трактора, а на выходе ЗППД 3 - код передачи прямолинейного движения трактора. Оба кода поступают на адресные входы ЗУ 4, в ячейках памяти которого хранятся предварительно записанные значения передач левого и правого бортов трактора для всех возможных кодов кривизны траектории и передачи прямолинейного движения. Считываемые значения передач поступают на входы ИЭ 5 и б, обеспечивая движение трактора с заданной блоком ЗППД 3 скоростью.
При изменении управляющего напряжения на входе АЦП 2 на его выходе будет происходить смена кода в соответствии со значением управляющего напряжения. Соответственно будет изменяться номер ячеек памяти ЗУ 4, содержимое которых считывается и поступает, на ИЭ 5 и 6. При этом произойдет переключение одной или обеих КПП 7 и 8, в связи с чем изменится скорость перематывания гусениц 9 и 10 двигателем
11. Трактор начнет двигаться по дуге окружности, радиус которой зависит от управляющего напряжения на входе АЦП 2 и определяется содержимым ячеек памяти ЗУ
4 независимо от тягового сопротивления аг- регатируемой машины.
Преимуществом предлагаемого механизма поворота является возможность исключения ручного труда тракториста при
управлении движением трактора. Не вызывает затруднений переход от автоматического управления трактором к ручному и наоборот.
Формула изобретения
Механизм поворота гусеничного трактора, содержащий раздельные по бортам коробки перемены.передач, переключаемые без разрыва потока мощности, исполнительные элементы и гусеницы, о т л и ч аю щ и и с я тем, что, с целью автоматизации управления траекторией движения трактора, он снабжен дополнительным электронным блоком управления, содержащим аналого-цифровой преобразователь, задатчик передачи прямолинейного движения трактора и запоминающее устройство, причем адресные входы запоминающего устройства соединены с выходами аналого-цифрового преобразователя и задатчика передачи прямолинейного движения трактора, выходы запоминающего устройства соединены с входами исполнительных элементов коробок перемены передач, а вход аналого-цифрового преобразователя
является управляющим входом механизма поворота.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОПАШНОЙ ГУСЕНИЧНЫЙ ТРАКТОР | 2009 |
|
RU2392163C1 |
| КОЛЕСНАЯ МОДИФИКАЦИЯ ГУСЕНИЧНОГО ТРАКТОРА | 2010 |
|
RU2432293C1 |
| ТРАКТОРНЫЙ АГРЕГАТ | 2004 |
|
RU2259030C1 |
| Трансмиссия наземного транспортного средства на базе вальной коробки перемены передач | 2022 |
|
RU2794081C1 |
| ПРОМЫШЛЕННЫЙ ТРАКТОРНЫЙ АГРЕГАТ С ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИЕЙ | 2014 |
|
RU2550867C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ГУСЕНИЧНЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2001 |
|
RU2194297C1 |
| ТРАНСМИССИЯ ТРАКТОРА | 2010 |
|
RU2418707C1 |
| Тяговый гусеничный модуль с изменяемой площадью контакта для колесного трактора | 2023 |
|
RU2835909C1 |
| Вально-планетарная гибридная трансмиссия | 2022 |
|
RU2805899C1 |
| ТРАНСМИССИЯ ТРАНСПОРТНОГО СРЕДСТВА | 1998 |
|
RU2138419C1 |
Изобретение относится к сельскохозяйственному машиностроению, в частности к автоматизации вождения машинно-тракторных агрегатов. Целью изобретения является автоматизация управления траекторией движения трактора. Механизм поворота гусеничного трактора содержит раздельные по бортам коробки 7, 8 перемены передач, переключаемые без разрыва потока мощности, а также исполнительные элементы 5, б коробок перемены передач, а также электронный блок 1 управления, состоящий из аналого-цифрового преобразователя 2, задатчика 3 передачи прямолинейного движения трактора (ЗППД) и запоминающее устройство 4, 1 ил.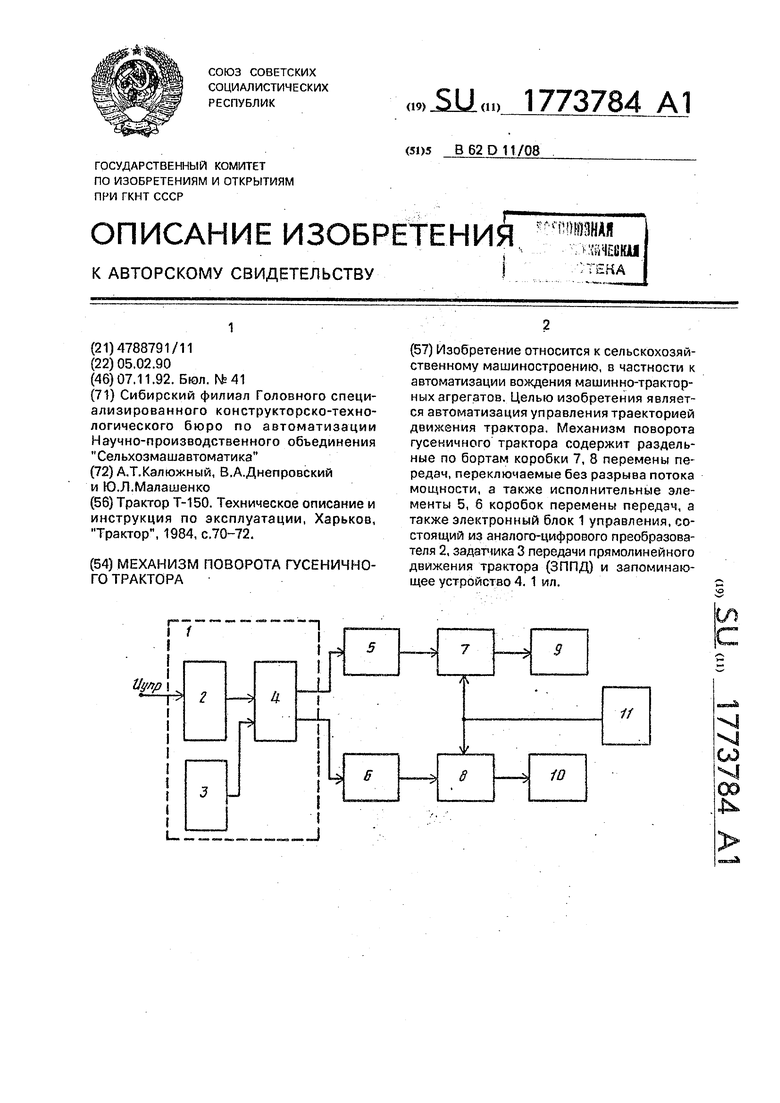
| Деревянный коленчатый рычаг | 1919 |
|
SU150A1 |
| Техническое описание и инструкция по эксплуатации, Харьков, Трактор, 1984, с.70-72. | |||
