Самоходная техника должна обладать высокими эксплуатационными свойствами, отвечающими требованиям современного сельскохозяйственного производства. Определяющими являются тягово-сцепные свойства и уплотняющее воздействие техники на почву, растительный покров и корневую систему растений. Кроме того, необходимо снизить до минимума буксование и срыв плодородного слоя почвы.
Уплотняющее воздействие движителей самоходной техники негативно влияет на физико-химические и агробиологические свойства почвы, что в конечном счете приводит к недобору урожая. Снижение веса энергонасыщенной самоходной техники до приемлемых значений уплотняющего воздействия на почву не является возможным. Поэтому единственно возможным способом снижения уплотняющего воздействия на почву является увеличение площади опорной поверхности движителей и равномерное распределение веса самоходной техники по ней.
Проблема повышения тягово-сцепных свойств и снижения уплотняющего воздействия на почву самоходной техники решается применением гусеничных тракторов. Однако, гусеничная техника при безусловных преимуществах над колесной имеет ряд ограничений, связанных с высокой стоимостью гусеничной техники, использованием ее на энергозатратных работах по основной и предпосевной обработке почвы, исключая работы по возделыванию и уходу за сельскохозяйственными культурами, запреты на передвижение по дорогам общего пользования и т.д. Колесную технику для обеспечения всесезонной работы в различных почвенно-климатических условиях необходимо оснащать комплектами дублирования колес (сдваивания, страивания и т.д.), подкатными мостами или технологическими модулями, а также тяговыми гусеничными модулями. Тяговые гусеничные модули имеют следующие схожие названия: съемные гусеничные ходовые системы, сменные гусеничные движители, гусеничные модули, полугусеничный движитель/ход и пр. Тяговые гусеничные модули устанавливаются, как правило, вместо колес машины и не требует переделки ее конструкции. Они позволяют повысить тягово-сцепные свойства тракторов, снизить их уплотняющее воздействие на почву, в том числе переуплотнение и срыв от буксования плодородного слоя почвы. Повышение тягово-сцепных свойств позволит повысить тяговый класс трактора по сцеплению, что даст возможность агрегатироваться с сельхозмашинами и оборудованием, предназначенных для тракторов более высокого тягового класса. Обеспечивается возможность работы в любых почвенно-климатических условиях.
Наряду с данными преимуществами необходимо обеспечить возможность уменьшения площади опорной поверхности гусениц для снижения сопротивления движению и повороту, а также энергозатрат при работе тракторной техники на дорогах с твердым покрытием.
Изобретение относится к сельскохозяйственному машиностроению, а именно к тракторной технике – ходовым системам тракторов и техническим средствам повышения их тягово-сцепных свойств и снижения уплотняющего воздействия на почву.
Известно гусеничное модульное устройство (патент RU 2591782 C2 МПК B62D55/125, 2016), устанавливающееся вместо колеса транспортного средства, содержащее узел привода с ведущим колесом гребневого зацепления с цилиндрическими элементами зацепления с гусеницей и дополнительными элементами, обеспечивающими жесткость конструкции ведущего колеса, устанавливаемое на ось колеса транспортного средства, раму опорных катков, соединяемую с кронштейном рамы транспортного средства посредством оси качания, жесткую систему подрессоривания опорных катков, опорные катки с обрезиненной поверхностью качения, бесконечную эластичную резиноармированную гусеницу, а также кронштейн соединения рамы катков с рамой трактора. К недостаткам известного устройства можно отнести отсутствие упругой подвески и возможности копирования рельефа опорной поверхности при движении – возможно лишь угловое перемещение рамы катков на оси качания в пределах зазора до отбойников; отсутствие явного угла атаки, сформированного геометрией гусеничного обвода, что ограничивает высоту преодолеваемых препятствий; отсутствие возможности изменения площади контакта гусеницы с опорной поверхностью; отсутствие как таковых механизмов натяжения/сдавания, что исключает возможность натяжения гусеницы и ее предохранения от многократных перегрузок.
Известен гусеничный модуль с резиноармированной гусеницей для транспортного средства (патенту US11214319 B2, МПК B62D55/10, 2019), устанавливающийся вместо колеса транспортного средства, содержащий узел привода с ведущим колесом гребневого зацепления, устанавливаемый на ось колеса транспортного средства, раму опорных катков, систему подрессоривания балансирного типа, состоящую из кареток, каждая из которых содержит по четыре опорных катка с возможностью их качания в продольной и поперечной плоскостях, кронштейн, соединяющий раму катков с рамой транспортного средства, в том числе через упруго-демпфирующие элементы, опорные катки с обрезиненной поверхностью качения, механизм натяжения/амортизационно-натяжное устройство механического или гидравлического типа, бесконечную эластичную резиноармированную гусеницу. К недостаткам известного устройства можно отнести отсутствие индивидуальной подвески опорных катков, что исключает смягчение и поглощение высокочастотных вибраций при движении по неровностям пути; отсутствие возможности изменения площади контакта гусеницы с опорной поверхностью.
Известны тяговые гусеничные модули заднего ведущего моста трактора (патенты EP 2103508B1, B62D55/08/084/10/14/15/18/30, B62D49/0635, 2011; KP 20120102021A, B62D55/02/108, B62D49/0635, B60Y2200/221, 2012; US 20220281540A1, B62D55/0842/04/084/104, B62D49/0635/0678, B60K17/34, 2022), устанавливающиеся вместо заднего колеса трактора, содержащие узел привода с ведущим колесом цевочного зацепления, устанавливаемым на ось колеса, в том числе через дополнительный повышающий редуктор, раму опорных катков балочного типа, систему подрессоривания опорных катков, преимущественно жесткого или балансирного исполнения, опорные катки с обрезиненной поверхностью качения, механизм натяжения/амортизационно-натяжное устройство механического или гидравлического типа, бесконечную эластичную резиноармированную гусеницу, а также кронштейн соединения рамы катков с рамой трактора. К недостаткам известного устройства можно отнести большую нагруженность зубьев одновенцового ведущего колеса, что приведет к снижению его долговечности и долговечности узла привода в целом; большая жесткость подвески опорных катков, что исключает эффект копирования рельефа опорной поверхности, смягчения и поглощения высокочастотных вибраций при движении по неровностям пути; изменение площади контакта гусеницы с опорной поверхностью в целом возможно, но только в пределах хода винта амортизационно-натяжного устройства при натяжении гусеницы и в пределах продольной жесткости гусеницы.
Наиболее близким по технической сущности к заявленному устройству является тяговый гусеничный модуль с регулированием давления в опорных катках в составе транспортного средства (патент US 11485433B2, B62D55/065/084/10/1125/116/12/14/15/24/244/305, B60C23/002/005/10/16, B62D11/003/20, G01M17/03, G01L5/1627, B60C2200/08, 2022), устанавливающийся вместо колеса трактора, содержащий узел привода с ведущим колесом гребневого зацепления, устанавливаемом на оси колеса, элементы рамы опорных катков, систему подрессоривания опорных катков, опорные катки с пневматическими шинами, механизм натяжения/амортизационно-натяжное устройство, бесконечную эластичную резиноармированную гусеницу, насос/компрессор подкачки шин катков, систему трубопроводов и запорно-регулирующей арматуры подвода жидкости/воздуха к шинам катков, систему электронного управления подкачкой шин катков. Достигнута возможность автоматизированного регулирования давления в шинах опорных катков, что позволяет изменяет площадь контакта катков с резиноармированной гусеницей, более равномерно распределять вес машины по опорной поверхности. В целом отчасти достигается управление тягово-сцепными свойствами трактора и его уплотняющим воздействием на почву, а также приспособление гусеничного модуля к рельефу опорной поверхности за счет податливости шин катков и эластичности гусеницы. К недостаткам известного устройства можно отнести большую сложность и низкую надежность конструкции системы изменения площади контакта опорных катков с эластичной гусеницей, состоящей большого количества трубопроводов и запорно-регулирующей арматуры. Следует отметить необходимость большого количества регулировок системы и конструкторско-технологических мероприятий по защите от внешних повреждений и утечек рабочей жидкости/воздуха.
Технической задачей предлагаемого изобретения является управление тягово-сцепными свойствами и уплотняющим воздействием на почву трактора при работе в различных почвенно-климатических условиях за счет обеспечения возможности регулирования площади контакта гусениц с опорной поверхностью.
Поставленная техническая задача достигается тем, что у тягового гусеничного модуля с изменяемой площадью контакта для колесного трактора, включающего узел привода с ведущим колесом, устанавливаемом на ось колеса трактора, раму опорных катков, систему подрессоривания опорных катков, кронштейн, соединяющий раму катков со ступицей ведущего колеса, опорные катки с обрезиненной поверхностью качения, механизм натяжения/амортизационно-натяжное устройство механического или гидравлического типа, бесконечную эластичную резиноармированную гусеницу, стабилизатор тангенциальной устойчивости, соединяющий раму опорных катков и раму трактора, систему регулирования площади контакта гусениц с опорной поверхностью, согласно изобретению, ведущее колесо комбинированного зацепления выполнено с усиленными барабанами подпора гусеницы, стабилизирующими работу гусеничного зацепления и разгружающими элементы зацепления ведущего колеса; направляющие колеса, связанные шарнирно через кривошипы с рамой опорных катков, имеют возможность подъема в крайнее верхнее и опускания в крайнее нижнее – опорное положение; механизм изменения площади контакта гусеницы с опорной поверхностью и механизм натяжения гусеницы выполнены с возможностью воздействия на направляющие колеса и изменения площади контакта гусеницы с опорной поверхностью и формы гусеничного обвода; механизм изменения площади контакта гусеницы с опорной поверхностью и механизм натяжения гусеницы могут быть выполнены в виде механизма с винтовой парой, гидроцилиндра, электроцилиндра для автоматизации и роботизации управления процессами изменения площади контакта гусеницы с опорной поверхностью и натяжения гусеницы; оси направляющих колес и опорных катков соединены попарно посредством упругих элементов, ограничивающих смещение в осевом, радиальном и угловом направлениях в пределах своей упругости, размещенных внутри обойм, заключенных в корпусах кареток опорных катков и кривошипов направляющих колес; оси кареток опорных катков и рамы опорных катков установлены внутри корпусов кареток опорных катков и рамы опорных катков посредством упругих элементов, ограничивающих смещение осей в осевом, радиальном и угловом направлениях в пределах своей упругости.
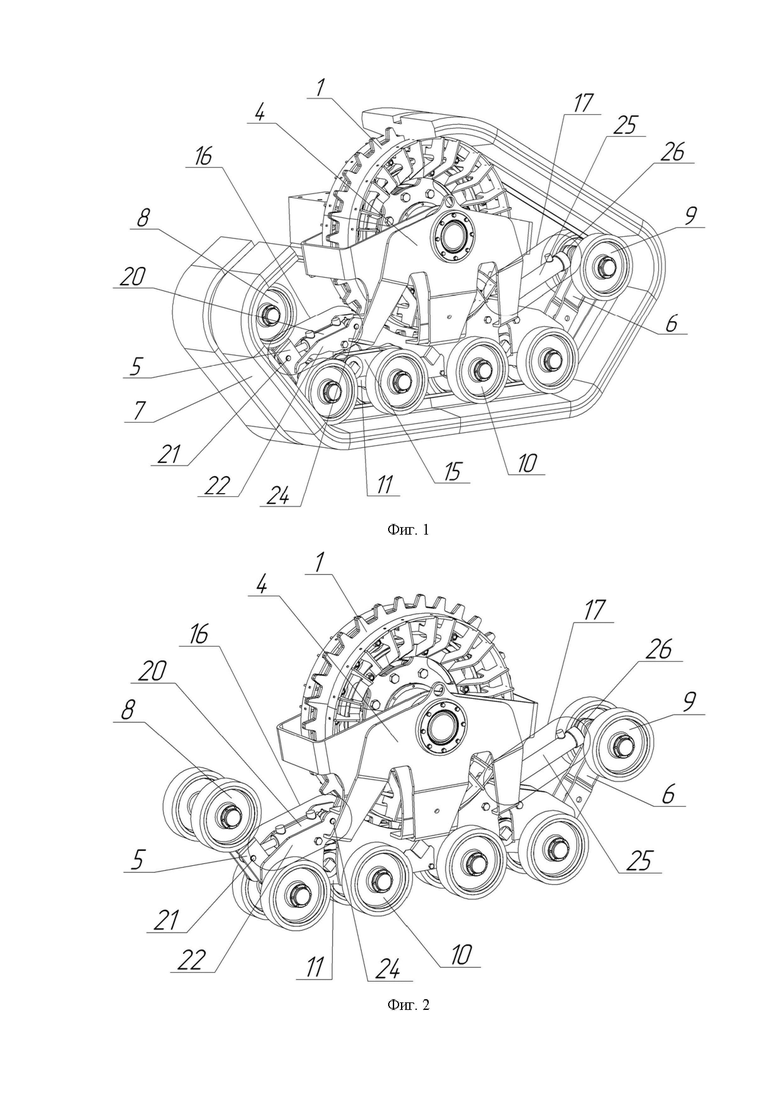
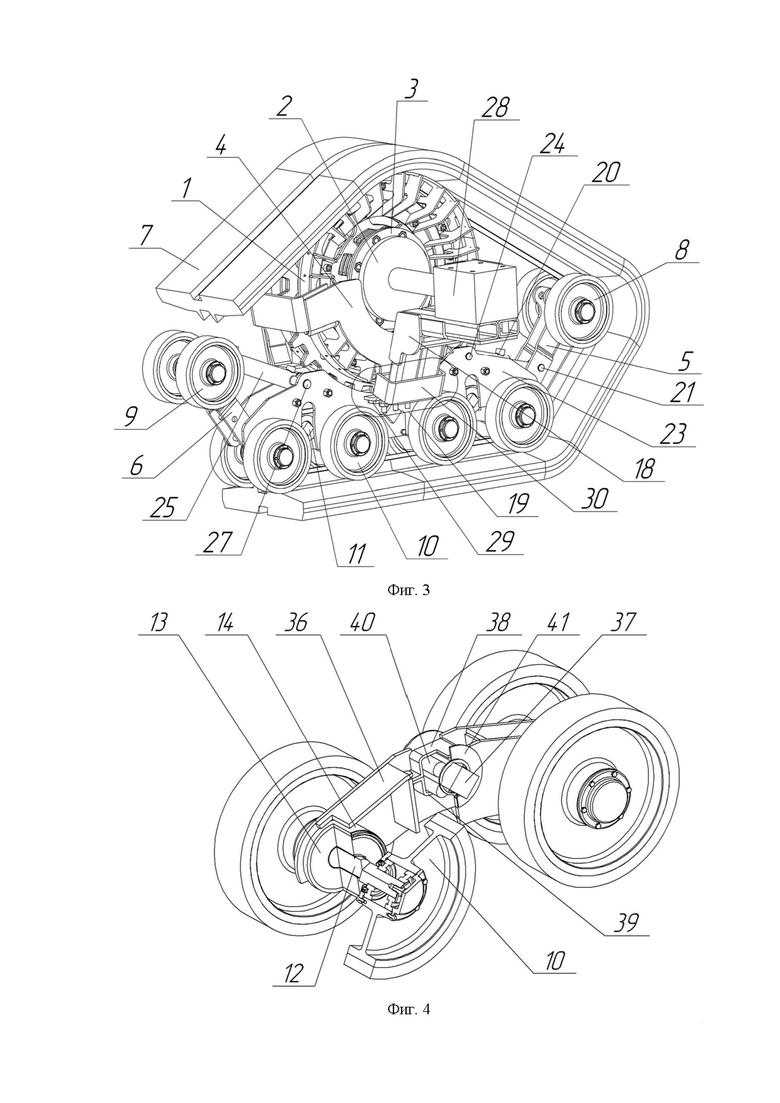
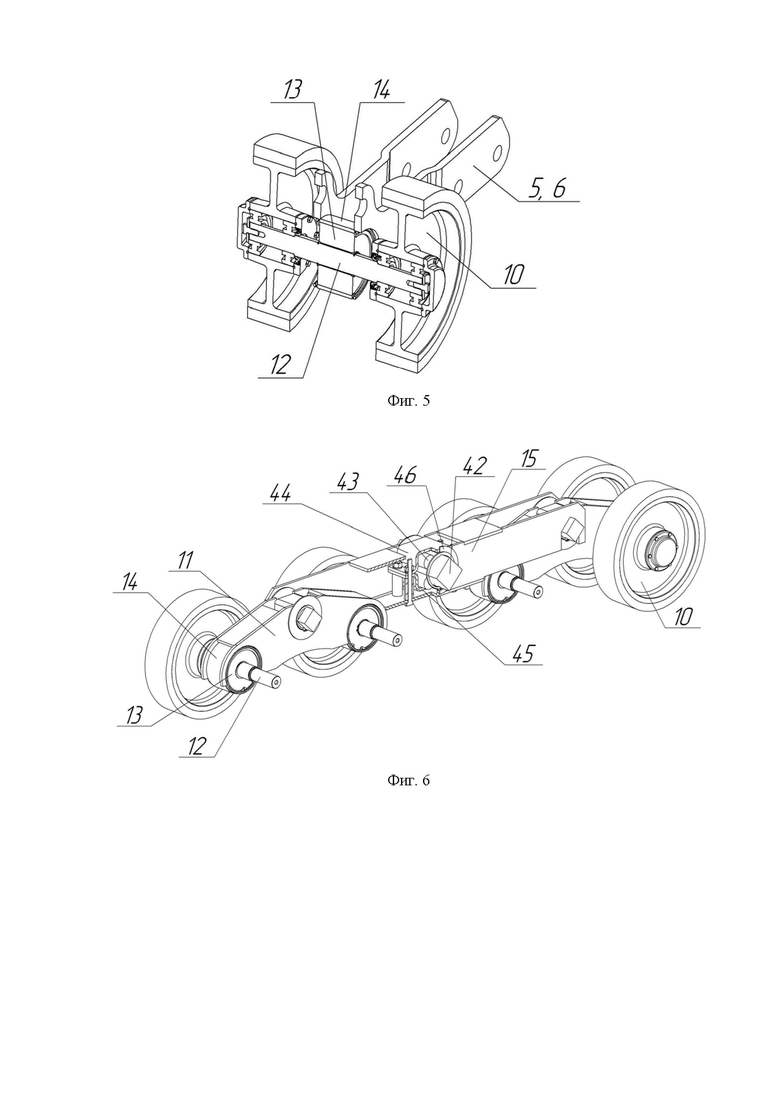
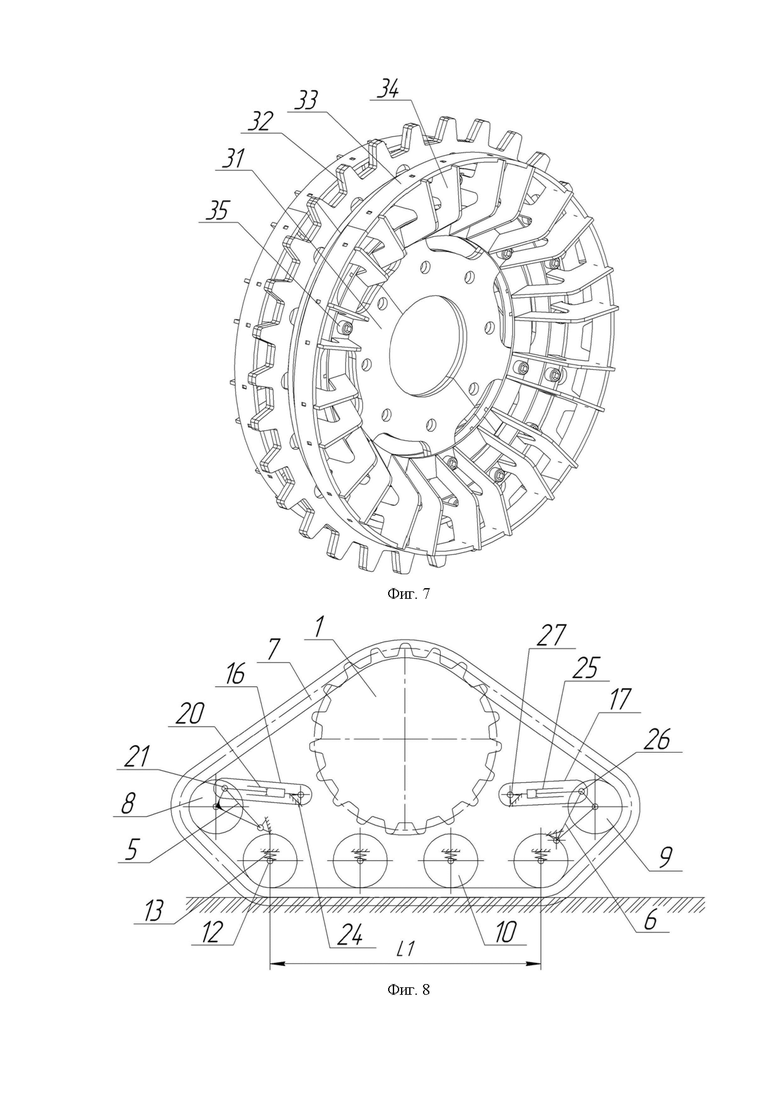
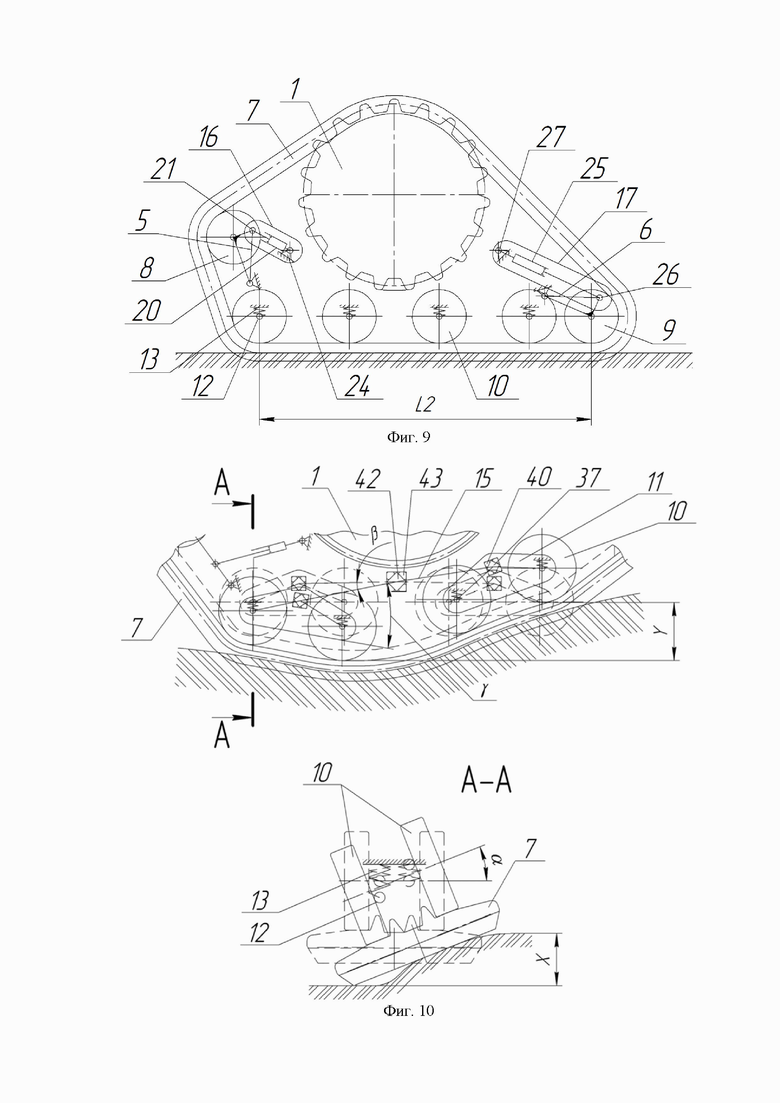
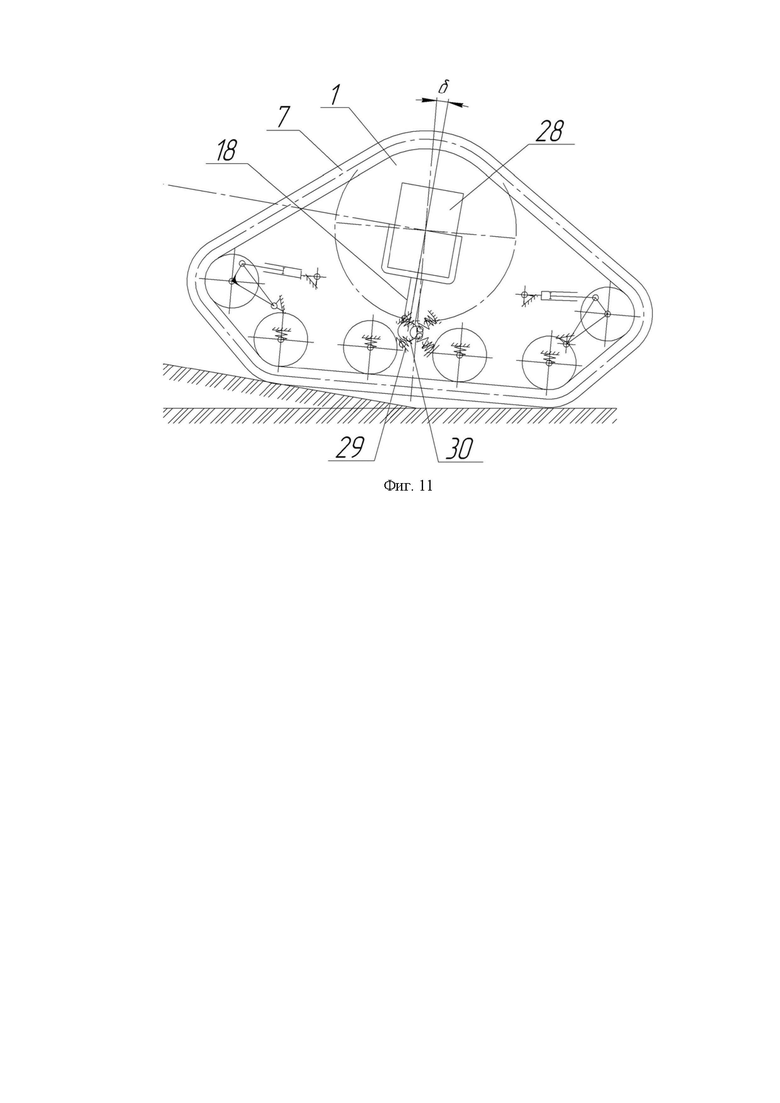
Изобретение поясняется чертежами. На фиг. 1 представлен главный вид (спереди) тягового гусеничного модуля с изменяемой площадью контакта для колесного трактора; на фиг. 2 представлен главный вид (спереди) тягового гусеничного модуля (без гусеницы) с изменяемой площадью контакта для колесного трактора; на фиг. 3 представлен главный вид (сзади) тягового гусеничного модуля с изменяемой площадью контакта для колесного трактора; на фиг. 4 представлена каретка опорных катков тягового гусеничного модуля с разрезами по осям опорного катка и каретки опорных катков; на фиг. 5 представлен разрез по оси направляющего колеса; на фиг. 6 представлена конструкция рамы опорных катков в сборе с осями опорных катков, осями кареток опорных катков и осью качания рамы опорных катков; на фиг. 7 представлена конструкция ведущего колеса комбинированного зацепления в сборе с усиленными барабанами подпора гусеницы; на фиг. 8 представлена кинематическая схема тягового гусеничного модуля при номинальной площади контакта с опорной поверхностью; на фиг. 9 представлена кинематическая схема тягового гусеничного модуля при максимальной площади контакта с опорной поверхностью; на фиг. 10 представлена кинематическая схема работы системы подрессоривания опорных катков при движении трактора; на фиг. 11 представлена кинематическая схема работы стабилизатора тангенциальной устойчивости тягового гусеничного модуля при заезде на препятствие.
Обозначения позиций на фигурах:
1 – съемное ведущее колесо с зубьями комбинированного зацепления;
2 – ступица ведущей оси трактора;
3 – ступица тягового гусеничного модуля;
4 – кронштейн, соединяющий раму опорных катков со ступицей ведущего колеса;
5 – передний кривошип;
6 – задний кривошип;
7 – бесконечная эластичная гусеница (резиноармированная гусеница);
8 – передние направляющие колеса;
9 – задние направляющие колеса;
10 – опорные катки;
11 – каретка опорных катков;
12 – ось опорных катков;
13 – упругие элементы опорных катков;
14 – обойма опорных катков;
15 – рама опорных катков;
16 – механизм натяжения гусеницы;
17 – механизм изменения площади контакта гусеницы с опорной поверхностью;
18 – стабилизатор тангенциальной устойчивости;
19 – узел крепления стабилизатора тангенциальной устойчивости к кронштейну рамы опорных катков;
20 – гидроцилиндр (исполнительный механизм) механизма натяжения;
21 – верхний шарнир механизма натяжения;
22 – внешний борт;
23 – внутренний борт;
24 – нижний шарнир механизма натяжения;
25 – гидроцилиндр (исполнительный механизм) механизма изменения площади контакта гусеницы с опорной поверхностью;
26 – верхний шарнир механизма изменения площади контакта гусеницы с опорной поверхностью;
27 – нижний шарнир механизма изменения площади контакта гусеницы с опорной поверхностью;
28 – балка ведущего моста трактора;
29 – нижний лист стабилизатора тангенциальной устойчивости;
30 – скоба стабилизатора тангенциальной устойчивости;
31 – основание ведущего колеса;
32 – венец ведущего колеса с элементами зацепления;
33 – усиленный барабан подпора гусеницы;
34 – ребра барабана подпора гусеницы;
35 – винты крепления разборного ведущего колеса;
36 – корпус каретки;
37 – ось каретки;
38 – верхняя часть корпуса демпфера каретки;
39 – нижняя часть корпуса демпфера каретки;
40 – жгутовый упругий элемент оси каретки;
41 – закрывающая шайба;
42 – ось качания рамы опорных катков;
43 – жгутовый упругий элемент рамы опорных катков;
44 – верхняя часть корпуса демпфера рамы опорных катков;
45 – нижняя часть корпуса демпфера рамы опорных катков;
46 – ограничивающая шайба.
Тяговый гусеничный модуль с изменяемой площадью контакта для колесного трактора состоит из съемного ведущего колеса 1 с зубьями комбинированного зацепления, устанавливаемого на ступицу 2 ведущей оси трактора посредством ответной ступицы 3 тягового гусеничного модуля, соединенной посредством подшипника с кронштейном 4, соединенным посредством оси качания 42 с рамой опорных катков 15, на которой снизу установлены каретки 11 опорных катков 10; по левому краю кронштейна 4 шарнирно установлен кривошип 5 с направляющим колесом 8 и механизм натяжения 16 гусеницы 7; по правому краю кронштейна 4 шарнирно установлен кривошип 6 с направляющим колесом 9 и механизм изменения площади контакта 17 гусеницы 7 с опорной поверхностью. Ведущее колесо 1 комбинированного преимущественно цевочно-фрикционного зацепления с бесконечной эластичной гусеницей 7 выполнено разборным по меньшей мере из двух частей, скрепляемых с помощью винтов 35, и состоит из оснований 31, венцов с элементами зацепления 32, барабанов 33 подпора гусеницы 7, усиленных ребрами 34. Кронштейн 4 выполнен сварным, соединяется с ответной ступицей 3 тягового гусеничного модуля посредством подшипника и включает внешний 22 и внутренний 23 борты, в которые установлена ось качания 42, размещенная с упругими элементами 43 между верхней 44 и нижней 45 частями корпуса демпфера. Причем ось качания 42 имеет квадратное сечение, а упругие элементы 43 выполнены преимущественно из полимерных жгутов и установлены по меньшей мере по одному элементу на каждой грани оси качания 42. Верхняя 44 и нижняя 45 части корпусов демпферов посредством болтовых соединений и втулок крепятся к раме катков 15 и стягиваются между собой, поджимая упругие элементы 43 к оси качания 42, образуя сайлент-блок рамы опорных катков 15, закрытый от попадания абразива ограничивающей шайбой 46. Сформированный таким образом сайлент-блок обеспечивает упругий ход рамы катков 15 относительно кронштейна 4 в осевом, радиальном, продольно-угловом и поперечно-угловом направлениях в пределах податливости упругих элементов 43. Для обеспечения упругого хода рамы катков 15 относительно кронштейна 4 внешний борт 22 и внутренний борт 23 имеют прорези для свободного перемещения по ним осей 37 кареток 11 и ограничения величины углового перемещения рамы опорных катков 15. В основании рамы опорных катков 15 установлены корпуса 36 кареток опорных катков 11 посредством осей кареток 37, размещенных с упругими элементами 40 между верхней 38 и нижней 39 частями корпуса демпфера. Причем оси кареток 37 имеют квадратное сечение, а упругие элементы 40 выполнены преимущественно из жгутов резины и установлены по меньшей мере по одному элементу на каждой грани оси каретки 37. К нижним 39 частям корпусов демпферов, приваренным к корпусам кареток 36, посредством болтовых соединений притягиваются верхние 38 части корпусов демпферов, поджимая упругие элементы 40 к осям кареток 37 и образуя сайлент-блок каретки, закрытый от попадания абразива шайбой 41. Сформированный таким образом сайлент-блок обеспечивает упругий ход каретки катков 11 относительно рамы катков 15 в осевом, радиальном, продольно-угловом и поперечно-угловом направлениях в пределах податливости упругих элементов 40. Каретки 11 опорных катков 10 содержат корпуса кареток 36 по краям которых приварены обоймы 14, внутри которых посредством упругих элементов 13 установлены оси 12. Обоймы 14 и оси 12, соединенные упругими элементами 13, образуют сайлент-блоки опорных катков, обеспечивающих упругий ход опорных катков 10 относительно корпуса каретки 11 опорных катков в осевом, радиальном, продольно-угловом и поперечно-угловом направлениях в пределах податливости упругих элементов 13. На каждой оси 12 посредством подшипников установлено по меньшей мере два опорных катка 10 с полимерной шиной. Сформированные сайлент-блоки осей опорных катков, кареток опорных катков и рамы опорных катков образуют систему подрессоривания, позволяющую смягчать и демпфировать толчки, удары и колебания при движении трактора по неровностям пути, а также копировать микрорельеф опорной поверхности. По левому краю кронштейна 4 между бортами 22 и 23 шарнирно установлен кривошип 5 с направляющим колесом 8, а по правому краю кронштейна 4 между бортами 22 и 23 шарнирно установлен кривошип 6 с направляющим колесом 9. К кривошипам 5 и 6 приварены обоймы 14, внутри которых посредством упругих элементов 13 установлены оси 12. Обоймы 14 и оси 12, соединенные упругими элементами 13, образуют сайлент-блоки направляющих колес, аналогичные по конструкции с сайлент-блоками опорных катков 10 и обеспечивающие упругий ход направляющих колес 8 и 9 относительно кривошипов 5 и 6 в осевом, радиальном, продольно-угловом и поперечно-угловом направлениях в пределах податливости упругих элементов 13. На каждой оси 12 посредством подшипников установлено по меньшей мере два направляющих колеса 8 и 9 с полимерными шинами, аналогичные по конструкции с опорными катками 10. Сформированные сайлент-блоки осей направляющих колес образуют систему подрессоривания, позволяющую смягчать и демпфировать толчки, удары и колебания при движении трактора по неровностям пути, а также копировать микрорельеф опорной поверхности при опорном положении направляющих колес или демпфер, позволяющий предохранить гусеницу от многократных перегрузок. Механизм натяжения 16 гусеницы 7 установлен между нижним шарниром 24, расположенным на бортах 22 и 23 кронштейна 4, и верхним шарниром 21, расположенным на кривошипе 5. Работа механизма натяжения 16 обеспечивается выдвижением/втягиванием гидроцилиндра 20 или электроцилиндра, или вывинчиванием/ввинчиванием винтовой пары. Механизм изменения площади контакта 17 гусеницы 7 с опорной поверхностью установлен между нижним шарниром 27, расположенным на бортах 22 и 23 кронштейна 4, и верхним шарниром 26, расположенным на кривошипе 6. Работа механизма изменения площади контакта 17 гусеницы 7 с опорной поверхностью обеспечивается выдвижением/втягиванием гидроцилиндра 25 или электроцилиндра, или вывинчиванием/ввинчиванием винтовой пары. Механизм изменения площади контакта 17 гусеницы 7 с опорной поверхностью и механизм натяжения 16 гусеницы 7 могут быть выполнены в виде механизма с винтовой парой, гидроцилиндра, электроцилиндра для автоматизации и роботизации управления процессами изменения площади контакта гусеницы с опорной поверхностью и натяжения гусеницы. Механизм изменения площади контакта 17 гусеницы 7 с опорной поверхностью и механизм натяжения 16 гусеницы 7 выполнены с возможностью воздействия на направляющие колеса, которые благодаря кривошипам 5 и 6 имеют возможность подъема в крайнее верхнее и опускания в крайнее нижнее – опорное положение, и изменения площади контакта гусеницы с опорной поверхностью и формы гусеничного обвода. К стойке кронштейна 4 посредством узла крепления 19, а точнее нижнего листа 29 и скобы 30, присоединен стабилизатор тангенциальной устойчивости 18, выполненный сварным и посредством болтового соединения закрепленный на балке ведущего моста 28 трактора. Причем стабилизатор тангенциальной устойчивости 18 может соединяться со стойкой кронштейна 4 не только жестко, но и через упругие элементы или с определенным воздушным зазором для смягчения ударных нагрузок в динамике. Стабилизатор тангенциальной устойчивости позволяет исключить критические угловые перемещения и переворот тягового гусеничного модуля вокруг ведущей оси трактора от действия внешних сил, приводящих к частичной или полной потере работоспособности ходовой системы трактора.
Устройство работает следующим образом. При движении по поверхностям с высокой несущей способностью (с твердым основанием) для обеспечения минимального сопротивления движению трактора и минимальных энергозатрат необходимо обеспечить минимальную площадь контакта с опорной поверхностью. Для этого задают номинальную длину опорной поверхности L1. При этом передний кривошип 5 направляющего колеса 8, связанный с механизмом натяжения 16 гусеницы 7 и задний кривошип 6 направляющего колеса 9, связанный с механизмом изменения площади контакта 17 гусеницы 7 с опорной поверхностью, находятся в верхнем положении, которое для заднего кривошипа 6 направляющего колеса 9 является крайним, а положение механизма натяжения 16 является промежуточным и обеспечивается рабочим усилием натяжения гусеницы. При этом поглощение колебаний натяжения гусеницы 7 происходит за счет податливости упругих элементов 13 передних и задних направляющих колес 8 и 9, а для дополнительного снижения нагрузки на гусеницу механизм натяжения 16 гусеницы 7 может оснащаться дополнительными устройствами, обеспечивающими его сдавание, такими как пневмогидроаккумулятор, связанный с полостью нагнетания, в случае применения гидроцилиндра натяжения, или установленными соосно или параллельно пружинным, фрикционным, гидравлическим или комбинированным механизмами, в случае применения других механических или электромеханических устройств в виде механизма с винтовой парой или электроцилиндра. Для опорных катков 10 упругие элементы 13 позволяют осуществлять копирование микрорельефа опорной поверхности. При движении трактора по почве с низкой несущей способностью (с мягким, рыхлым, влажным основанием) или под действием других факторов, ухудшающих проходимость, и создающих препятствия движению, требуется максимальная поверхность контакта L2. Для этого вручную или автоматически производится увеличение площади контакта гусеницы 7 с опорной поверхностью, в процессе чего передний кривошип 5 направляющего колеса 8 под действием механизма натяжения 16 гусеницы 7 за счет втягивания штока гидроцилиндра 20 или электроцилиндра, или ввинчивания винтовой пары механизма натяжения переводится в верхнее крайнее положение, снижая натяжение гусеницы 7, органы управления трактором переводятся в нейтральное положение, чтобы не создавать препятствия вращению ведущего колеса 1, после чего посредством выдвижения штока гидроцилиндра 25 или электроцилиндра, или вывинчивания винтовой пары механизма изменения площади контакта 17 гусеницы 7 с опорной поверхностью задний кривошип 6 направляющего колеса 9 перемещается в крайнее нижнее (опорное) или любое промежуточное положение в зависимости от необходимости обеспечения дополнительной площади контакта с опорной поверхностью, после чего за счет выдвижения штока гидроцилиндра 20 или электроцилиндра, или вывинчивания винтовой пары под действием механизма натяжения 16 гусеницы 7 на передний кривошип 5 переднего направляющего колеса 8 создается необходимый уровень натяжения гусеницы 7. При этом изменяются передний и задний углы атаки тягового гусеничного модуля и форма гусеничного обода, и таким образом обеспечивается дополнительная площадь контакта гусеницы 7 с опорной поверхностью. Механизм натяжения 16 гусеницы 7 и механизм изменения площади контакта 17 гусеницы 7 с опорной поверхностью могут быть выполнены в виде гидроцилиндров и электрических цилиндров, что позволяет автоматизировать и роботизировать процессы натяжения гусеницы и изменения площади ее контакта с опорной поверхностью. При этом достигается приращение площади контакта гусеницы с опорной поверхностью с увеличением базы трактора, что увеличивает его устойчивость при работе на уклонах и с навесным оборудованием. При преодолении участка почвы с низкой несущей способностью для возвращения к номинальному значению площади контакта гусеницы 7 с опорной поверхностью требуются аналогичные действия по последовательному снижению и созданию натяжения гусеницы, но с возвратом заднего кривошипа 6 направляющего колеса 9 в крайнее верхнее положение. Система подрессоривания тягового гусеничного модуля смягчает и демпфирует толчки, удары и колебания при движении трактора по неровностям пути, а также обеспечивает копирование микрорельефа опорной поверхности. При этом сайлент-блоки осей 12 опорных катков 10 и направляющих колес 8 и 9 обеспечивают возможность перемещения осей 12 опорных катков 10 в осевом, радиальном, продольно-угловом и поперечно-угловом направлениях в пределах податливости упругих элементов 13, в том числе осей 12 опорных катков 10 на некоторый угол α в след за перемещением гусеницы 7 при движении поперек уклона или по небольшому препятствию высотой X. Сайлент-блоки кареток 11 опорных катков 10 обеспечивают возможность независимого перемещения кареток 11 с осями 12 опорных катков 10 в осевом, радиальном, продольно-угловом и поперечно-угловом направлениях в пределах податливости упругих элементов 40, в том числе на некоторый угол γ относительно текущего положения рамы 15 опорных катков 10. Сайлент-блок рамы 15 опорных катков 10 обеспечивает возможность перемещения рамы 15 и осей кареток 37 опорных катков 10 относительно оси качания 42 в осевом, радиальном, продольно-угловом и поперечно-угловом направлениях в пределах податливости упругих элементов, в том числе на некоторый угол β, что позволяет осуществить продольное копирование рельефа вслед за перемещением гусеницы 7 по направлению движения с выстой неровностей Y. Применительно к сайлент-блокам направляющих колес 8 и 9 дополнительно осуществляется функция сдавания для предохранения гусеницы 7 от многократных перегрузок. При движении по поверхности с многочисленными чередующимися продольными уклонами или при заезде на наклонно расположенную поверхность/препятствие, а также в случае изменения характера распределения касательных сил при движении трактора возникает опасность переворота тягового гусеничного модуля вокруг оси ведущего колеса 2. В этом случае защиту от такого переворота осуществляет стабилизатор тангенциальной устойчивости 18. При совершении углового перемещения относительно оси колеса трактора 2 на некоторый угол δ кронштейн 4, через жесткую связь, или упругие элементы, или после прохождения некоторого воздушного зазора упирается в нижний лист стабилизатора тангенциальной устойчивости 29 и скобу стабилизатора тангенциальной устойчивости 30, посредством которых передает нагрузку на силовые элементы стабилизатора тангенциальной устойчивости 18, закрепленные на балке ведущего моста трактора 28. При продолжении воздействия при наличии упругих элементов они начинают сжиматься, обеспечивая некоторый упругий ход тягового гусеничного модуля на некоторый угол δ относительно балки ведущего моста трактора 28, а также снижая ударные нагрузки, приходящиеся на балку ведущего моста трактора 28 от переворачивающего момента, а при отсутствии упругих элементов, напрямую передавая нагрузку на балку ведущего моста трактора 28 предотвращая тем самым переворот тягового гусеничного модуля вокруг оси ведущего колеса 2. Вне зависимости от характера движения тягового гусеничного модуля по опорной поверхности и текущего состояния механизма натяжения гусеницы 16 и механизм изменения площади контакта гусеницы с опорной поверхностью 17 ведущее колесо с зубьями комбинированного зацепления 1 обеспечивает дополнительную силу трения возникающую в зоне контакта гусеницы 7 с усиленными барабанами подпора гусеницы 33, что провоцирует снижение нагрузки на зубья и впадины зубчатого венца ведущего колеса 32, обеспечивая лучшую передачу тягового усилия от ведущего колеса 1 к гусенице 7 и более стабильную работу зацепления.
Экономический эффект от применения тяговых гусеничных модулей с изменяемой площадью контакта заключается в следующем. При движении трактора без орудия на заднюю ось приходится доля веса, равная 26094,6 Н, то есть 13047,3 Н на полуось. При движении трактора с орудием доля веса, приходящаяся на заднюю ось, возрастает до 49127,4 Н, что в пересчете на полуось составляет 24563,7 Н. Площадь контакта гусеницы с опорной поверхностью для трактора класса 1,4 составляет минимум 472500 мм2 и максимум 654300 мм2. Получается, что для трактора без орудия при номинальном значении площади контакта давление со стороны тягового гусеничного модуля на опорную поверхность составит 28 кПа, а при максимальном значении площади контакта – 20 кПа. Для трактора с орудием величина этого же давления составит 52 кПа при номинальном значении площади контакта и 37 кПа при максимальном значении площади контакта. Таким образом, учитывая, что на заднюю ось трактора приходится не менее 66,5 % (а с орудием и более 70%) общего веса можно сказать, что при установке тяговых гусеничных модулей обеспечивается уменьшение среднего давления трактора на почву как минимум до 60 кПа при установке только на заднюю ось и свыше 40 кПа – при установке на обе оси трактора. Даже без увеличения площади опорной поверхности за счет механизма изменения площади контакта гусеницы трактор с тяговыми гусеничными модулями обеспечивает давление на почву менее нормативного значения 80 кПа по ГОСТ Р 58655-2019 при наибольшей влажности почвы и наименьшей влагоемкости свыше 0,9 НВ в том числе при движении с навесным орудием.
Трактор с тяговыми гусеничными модулями способен работать в различных почвенно-климатических условиях. Обеспечивает повышение тягово-сцепных свойств и навесоспособности трактора, что позволяет перевести его в более высокий класс тяги по сцеплению и обеспечить возможность агрегатирования с сельскохозяйственными машинами и орудиями, предназначенными для тракторов более высоких тяговых классов. Т.е. за счет тяговых гусеничных модулей возможно получить трактор переменного тягового класса – три трактора в одном: базовый колесный, колесно-гусеничный более высокого тягового класса, гусеничный. Это дополнительно позволит компенсировать дефицит тракторной техники в отечественном парке тракторов по отдельным классам тяги.
Автоматизация и роботизация регулировочных процессов, в том числе изменения натяжения гусеницы и площади ее контакта с опорной поверхностью, позволяют создать ходовую систему, адаптивную к изменяющимся режимам работы, почвенно-климатическим условиям, рельефу почвенного фона или дорожного покрытия.
Тяговые гусеничные модули позволяют обеспечить полную годовую загрузку трактора, его более ранний выход на полевые работы и в целом – повысить производительность работ в сельскохозяйственном производстве.
| название | год | авторы | номер документа |
|---|---|---|---|
| Ходовая часть гусеничного транспортного средства | 1988 |
|
SU1523457A1 |
| ГУСЕНИЧНЫЙ ТРАКТОР | 2006 |
|
RU2303549C1 |
| ХОДОВАЯ ЧАСТЬ ГУСЕНИЧНОГО БОЛОТОХОДНОГО ТРАКТОРА | 1992 |
|
RU2045438C1 |
| ГУСЕНИЧНЫЙ ТРАКТОР | 2008 |
|
RU2364540C1 |
| ХОДОВАЯ ЧАСТЬ ГУСЕНИЧНОГО ТРАКТОРА | 1999 |
|
RU2162629C2 |
| Гусеничный трактор | 1978 |
|
SU740588A1 |
| ГУСЕНИЧНЫЙ ТРАКТОР С ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИЕЙ (ВАРИАНТЫ) | 2019 |
|
RU2720694C1 |
| Гусеничный движитель сельскохозяйственного трактора | 1981 |
|
SU958201A1 |
| ГУСЕНИЧНЫЙ ТРАКТОР | 1991 |
|
RU2033363C1 |
| ПОДВЕСКА ГУСЕНИЧНОЙ МАШИНЫ | 1991 |
|
RU2025378C1 |
Изобретение относится к ходовым системам тракторов и техническим средствам повышения их тягово-сцепных свойств. Тяговый гусеничный модуль содержит ведущее колесо, раму катков, по краям которой шарнирно закрепляются кривошипы с направляющими колесами с возможностью их подъема и опускания, бесконечную эластичную гусеницу, систему подрессоривания, опорные катки, направляющие колеса, механизм натяжения гусеницы, механизм изменения площади контакта гусеницы с опорной поверхностью, стабилизатор тангенциальной устойчивости. Достигается снижение уплотняющего воздействия на почву и расширение функциональных качеств тракторов. 11 ил.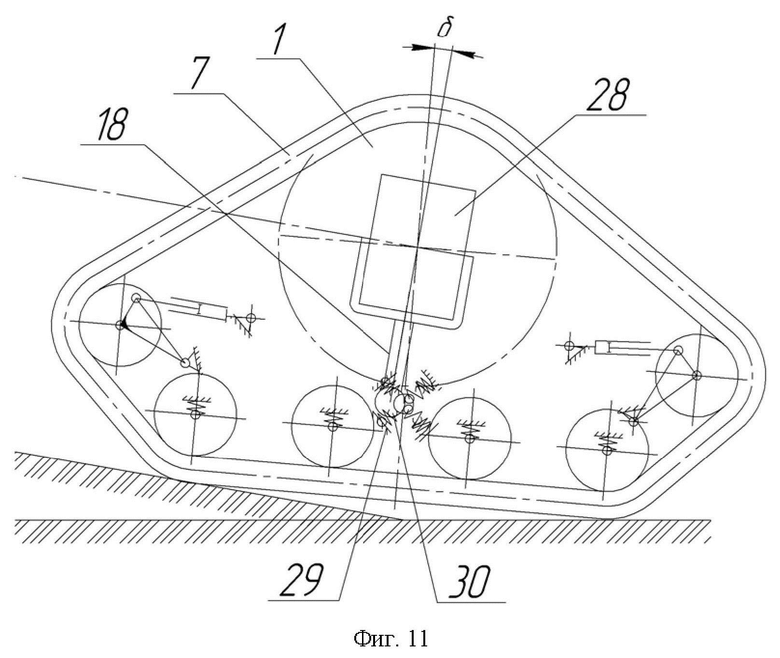
Тяговый гусеничный модуль с изменяемой площадью контакта для колесного трактора, включающий узел привода с ведущим колесом, устанавливаемым на ось колеса трактора, раму опорных катков, систему подрессоривания опорных катков, кронштейн, соединяющий раму катков со ступицей ведущего колеса, опорные катки с обрезиненной поверхностью качения, механизм натяжения/амортизационно-натяжное устройство, бесконечную эластичную гусеницу, стабилизатор тангенциальной устойчивости, соединяющий раму опорных катков и раму трактора, систему регулирования площади контакта опорной поверхности гусениц, отличающийся тем, что ведущее колесо комбинированного зацепления выполнено с усиленными барабанами подпора гусеницы, стабилизирующими работу гусеничного зацепления и разгружающими элементы зацепления ведущего колеса; направляющие колеса, связанные шарнирно через кривошипы с рамой опорных катков, имеют возможность подъема в крайнее верхнее и опускания в крайнее нижнее - опорное - положение; механизм изменения площади контакта гусеницы с опорной поверхностью и механизм натяжения гусеницы выполнены с возможностью воздействия на направляющие колеса и изменения площади контакта гусеницы с опорной поверхностью и формы гусеничного обвода; механизм изменения площади контакта гусеницы с опорной поверхностью и механизм натяжения гусеницы могут быть выполнены в виде механизма с винтовой парой, гидроцилиндра, электроцилиндра для автоматизации и роботизации управления процессами изменения площади контакта гусеницы с опорной поверхностью и натяжения гусеницы; оси направляющих колес и опорных катков соединены попарно посредством упругих элементов, ограничивающих смещение в осевом, радиальном и угловом направлениях в пределах своей упругости, размещенных внутри обойм, заключенных в корпусах кареток опорных катков и кривошипов направляющих колес; оси кареток опорных катков и рамы опорных катков установлены внутри корпусов кареток опорных катков и рамы опорных катков посредством упругих элементов, ограничивающих смещение осей в осевом, радиальном и угловом направлениях в пределах своей упругости.
| CN 202529053 U, 14.11.2012 | |||
| Гусенично-модульное устройство с регулировкой площади контакта гусеницы | 2021 |
|
RU2773146C1 |
| US 3447620 A1, 03.06.1969 | |||
| CN 104691634 A, 10.06.2015. | |||

