Изобретение относится к измерительной технике и может быть использовано для определения мгновенных угловых качаний роторов электродвигателей.
Известно устройство для контроля угловых качаний ротора синхронного электродвигателя, содержащее эталонный генератор, первый делитель частоты, усилитель мощности, импульсный датчик положения ротора, формирователь контролируемых импульсов, блок фазового измерения, первый вспомогательный делитель частоты, коммутатор длительности и формирователь эталонных импульсов, блок добавления и вычитания импульсов, второй делитель частоты, формирователь сигналов управления автоподстройкой и блок регистрации.
Это устройство, имеющее довольно сложную схему и ограниченную область применения, позволяет измерять только изменение угла качаний, происходящее за время поворота поля синхронного электродвигателя на 1/К часть оборота, где К - количество импульсов датчика положения на один оборот, тогда как в ряде случаев требуется оценка угла качаний на протяжении одного или нескольких оборотов не только синхронных, а и других типов электродвигателей.
Наиболее близким к изобретению по технической сущности является уст ройство для определения угловых качаний ротора электродвигателя, содержащее эталонный генератор, последовательно соединенные импульсный датчик положения ротора, формирователь контролируемых импульсоп и
ч|
VI
О Ю 00
N
коммутатор импульсов эталонного генератора, состоящий из триггера со счетным входом и двух элементов И-НЕ, первые входы которых подключены соответственно к прямому и инверсному выходам триггера, а вторые входы - к выходу эталонного генератора, два счетчика, входы которых подключены к выходам элементов И-НЕ коммутатора, и последовательно соединенные мультиплексор, информационные входы которого подключены к информационным выходам счетчиков, а управляющий вход - к одному из выходов триггера, блок связи с объектом, управляющие выходы которого подключены к входам сброса счетчиков,электронно-вычислительную машину и периферийный блок.
Недостатками этого устройства являются сложность реализации и низкая надежность в связи с наличием большого количества информационных шинных соединений.
Цель изобретения - упрощение и повышение надежности устройства.
Поставленная цель достигается тем, что в устройстве для определения угловых качаний ротора электродвигателя, содержащем эталонный генератор, последовательно соединенные импульсный датчик положения ротора, формирователь контролируемых импульсов и коммутатор импульсов эталонного генератора, первый и второй счетчики импульсов, последовательно соединенные блок связи с объектом, электронно-вычислительную машину и периферийный блок, со- гласно изобретению, первый счетчик выполнен в виде счетчика постоянного числа импульсов, а коммутатор импульсов эталонного генератора - в виде RS-триггера и элемента И, выход формирователя контро- лируемых импульсов подключен к управляющему входу устройства связи с объектом и S-входу триггера, инверсный выход которого подключен к первому входу элемента И и к входу сброса первого счетчика постоянного числа импульсов, к счетному входу которого и к второму входу элемента И подключен выход эталонного генератора, выход первого счетчика постоянного числа импульсов подключен к R-входу триггера и к входу сброса второго счетчика импульсов, счетный вход которого подключен к выходу элемента И, а выходная информационная шина соединена с входной информационной шиной блока связи с объектом.
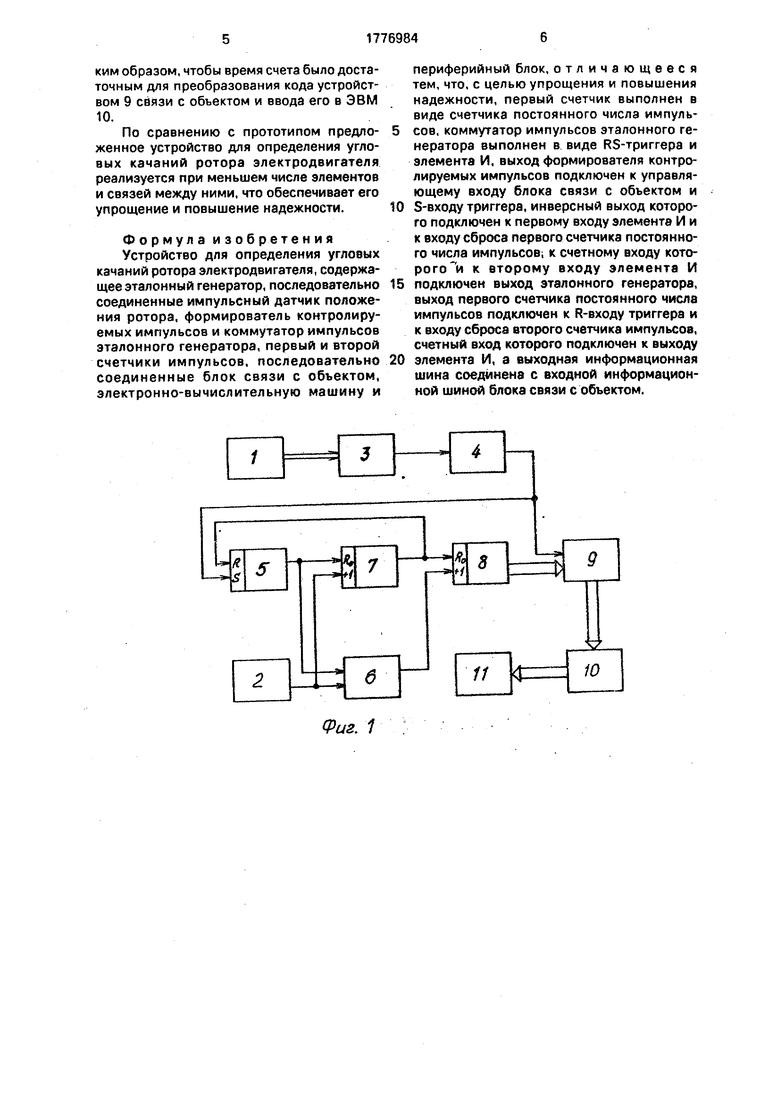
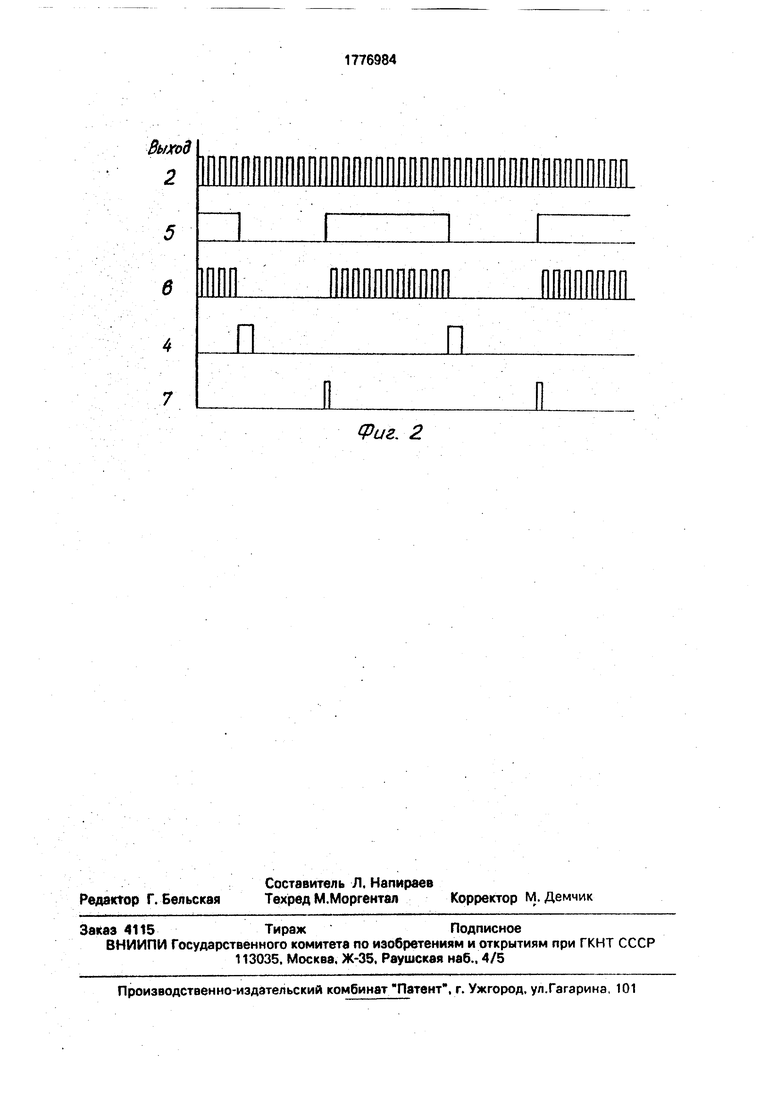
На фиг. 1 представлена структурная схема устройства; на фиг. 2 - фрагмент временной диаграммы его работы.
Устройство для определения угловых качаний электродвигателя 1 содержит эталонный генератор 2, импульсный датчик 3 положения ротора, формирователь 4 контролируемых импупьсов, коммутатор импульсов эталонного генератора, состоящий из RS-триггера 5 и элемента 6 И, первый счетчик 7 постоя иного числа импульсов, второй счетчик 8, блок 9 связи с объектом, элек- тронно-вычислительную машину 10 и периферийный блок 11.
Информация об угловом положении ротора электродвигателя 1 от датчика 3 через формирователь 4 в виде последовательности контролируемых импульсов с временной девиацией, соответствующей угловцм качаниям электродвигателя 1, поступает на S-вход триггера 5. Каждый импульс этой последовательности переключает триггер 5 в состояние нулевого логического уровня на его инверсном выходе, которое обеспечивает отсчет импульсов эталонного генератора 2 первым счетчиком 7 постоянного числа импульсов и с помощью элемента 6 И запрещает поступление импульсов эталонного генератора 2 на вход второго счетчика 8. После отсчета заданного числа импульсов первым счетчиком 7 его выходной сигнал обнуляет второй счетчик 8 и по R-входу триггера 5 переводит последний в состояние единичного логического уровня на инверсном выходе, что приводит к сбросу первого счетчика 7 и появлению на выходе элемента 6 И импульсов эталонного генератора 2, которые поступают на счетный вход второго счетчика 8 и подсчитываются им, так как на входе сброса счетчика 8 имеет место нулевой логический уровень сигнала первого счетчика 7. Отсчет импульсов эталонного генератора 2 вторым счетчиком 8 осуществляется до прихода следующего импульса с формирователя 4, который разрешает преобразование кода второго счетчика 8 устройством 9 связи с объектом по его управляющему входу. Преобразованный устройством 9 связи с объектом код длительности периода последовательности контролируемых импульсов вводится в ЭВМ 10, увеличивается на, величину, равную постоянному числу импульсов первого счетчика 7, и записывается в память ЭВМ 10. После повторения описанного процесса заданное число раз в памяти ЭВМ 10 формируется массив кодов длительности периодов следующих друг за другом импульсов контролируемой последовательности, который обрабатывается ЭВМ 10 по выбранному алгоритму, а результаты обработки отображаются периферийным блоком 11.
Постоянное число импульсов, отсчитываемое первым счетчиком 7, выбирают таким образом, чтобы время счета было достаточным для преобразования кода устройством 9 связи с объектом и ввода его в ЭВМ 10.
По сравнению с прототипом предло- женное устройство для определения угловых качаний ротора электродвигателя реализуется при меньшем числе элементов и связей между ними, что обеспечивает его упрощение и повышение надежности.
Формула изобретения Устройство для определения угловых качаний ротора электродвигателя, содержащее эталонный генератор, последовательно соединенные импульсный датчик положения ротора, формирователь контролируемых импульсов и коммутатор импульсов эталонного генератора, первый и второй счетчики импульсов, последовательно соединенные блок связи с объектом, электронно-вычислительную машину и
периферийный блок, отличающееся тем, что, с целью упрощения и повышения надежности, первый счетчик выполнен в виде счетчика постоянного числа импульсов, коммутатор импульсов эталонного генератора выполнен в виде RS-триггера и элемента И. выход формирователя контролируемых импульсов подключен к управляющему входу блока связи с объектом и S-входу триггера, инверсный выход которого подключен к первому входу элементе И и к входу сброса первого счетчика постоянного числа импульсов; к счетному входу которого и к второму входу элемента И подключен выход эталонного генератора, выход первого счетчика постоянного числа импульсов подключен к R-входу триггера и к входу сброса второго счетчика импульсов, счетный вход которого подключен к выходу элемента И, а выходная информационная шина соединена с входной информационной шиной блока связи с объектом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения угловых качаний ротора электродвигателя и устройство для его осуществления | 1986 |
|
SU1364861A1 |
| Устройство для контроля монтажа | 1986 |
|
SU1312616A1 |
| Способ контроля угловых качаний ротора синхронного электродвигателя и устройство для его осуществления | 1980 |
|
SU917084A1 |
| Устройство для контроля электрического монтажа | 1980 |
|
SU1096657A1 |
| Устройство для контроля параметров объекта | 1983 |
|
SU1164670A1 |
| Устройство для контроля и диагностирования цифровых узлов | 1989 |
|
SU1755207A1 |
| Устройство для контроля логических блоков | 1984 |
|
SU1367015A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО КОНТРОЛЯ ПАРАМЕТРОВ НАПРЯЖЕНИЯ | 1990 |
|
RU2018147C1 |
| Устройство для преобразования контролируемых параметров | 1986 |
|
SU1320816A1 |
| Устройство для контроля печатных плат | 1986 |
|
SU1472929A1 |
Изобретение относится к измерительной технике и может быть использовано для определения мгновенных угловых качаний роторов электродвигателей. Цель изобретения - упрощение и повышение надежности устройства. Для этого в устройстве, содержащем эталонный генератор, импульсный датчик положения ротора, формирователь, первый счетчик импульсов, триггер, блок связи с объектом, ЭВМ, периферийный блок, элемент запрета и второй счетчик импульсов, элемент запрета выполнен в виде элемента И, первый счетчик импульсов выполнен в виде счетчика постоянного числа импульсов. 2 ил.
Фиг. 1
Выход 2
в
4
П
п
Фиг. 2
| Способ контроля угловых качаний ротора синхронного электродвигателя и устройство для его осуществления | 1980 |
|
SU917084A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ определения угловых качаний ротора электродвигателя и устройство для его осуществления | 1986 |
|
SU1364861A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Пневматический водоподъемный аппарат-двигатель | 1917 |
|
SU1986A1 |
