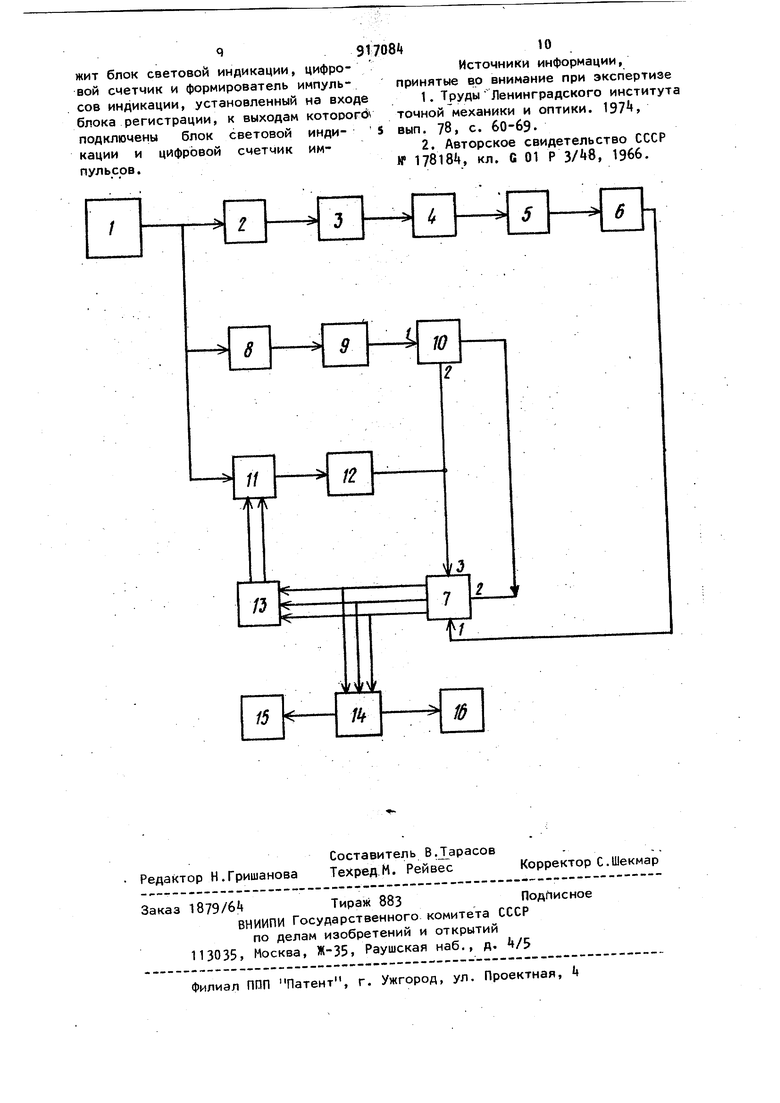
(5) СПОСОБ КЬНТРОЛЯ УГЛОВЫХ КАЧАНИЙ РОТОРА СИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ : . . . , ,. -: Изобретение относится к измерительной технике и может быть использовано для контроля и автоМатичёскбй регистрации мгновенных малых угловых качаний роторов синхронных микрозлектродвигателей, применяемых в пре цйзионных электроприводах при их испытаниях в условиях .массового или серийного выпуска.Известен способ контроля угловых качаний, при котором формируют временную последовательность импульсов от датчика положения ротора и измеря ют изменение углового полон ения указанной последовательности относитель но опорной последовательности импуль сов той же частоты с помощью регистрирующих приборов 1. Недостаток известного способа состоит в том, что требуется индивидуальная настройка применительно к каж дому испытуемому двигателю, что усло няет организацию работ в условиях массового производства. Наиболее близким к предлагаемому по технической сущности является способ контроля угловых качаний ротора синхронного электродвигателя, при котором формируют временную последовательность контролируемых импульсов, определяемую мгновенной частотой вращения ротора с временной девиацией , соответствующей закону угловых качаний ротора, сравнивают с эталонной временной последовательностью импульсов и выделяют разность фаз между импульсами указанных последовательностей, колебания которой пропорциональны мгновенным значениям угловых качаний ротора. После преобразования разности фаз в анало -напряжение с помощью электронного осциллографа или другого быстродействующего устройства судят о величине угловых качаний вращающегося ротора. Известный способ контроля угловых качаний ротора осуществляют устрой- ,. ством, содержащим соединенные после 3J довательно эталонный генератор, делитель частоты, усилитель мощности, испытуемый электродвигатель с импульсным датчиком скорости вращения ротора, установленным на его валу и подключенн) ко входу формирователя контролируемых импульсов, выход которого соединен с первым входом блока фазового измерения и блок реги страции 2j. К недостаткам известного способа и устройства следует отнести сложность процесса контроля и регистрации мгновенных углов качания, невысокую надежность измерения, сложность конструкции датчика скорости, требующего для повышения чувствительност большого количества информационных меток (отверстий или зубцов и впадин) и высокой точности нанесения этих меток на модулирующем диске, при менения корректирующих угловую погрешность нанесения меток фильтров, могущих внести динамическую ошибку в процесс измерения. Преобразование угловых качаний в аналог-напряжение также приводит к потере точности измерения, а необходимость использования в качестве регистрирующего прибора электронного осциллографа, помимо снижения надежности и точности считы вания достоверных показаний при массовом контроле, повышает трудоемкост и усложняет задачу автоматизации это операции. Цель изобретения - упрощение процесса контроля, повьшение точности контроля и регистрации мгновенных углов качания ротора, повышение надежности измерения, получение возмож ности автоматизировать процесс регистрации результатов измерения, что особенно важно в .условиях массового контроля. . Поставленная цель достигается тем что импульсы эталонной временной последовательности формируют заданной длительности, соответствующей в масштабе времени допустимому углу ка чания ротора, кратковременным измене нием частоты следования эталонных импульсов добиваются совпадения их во времени с последовательностью контролируемых импульсов и регистрируют каждое несовпадение во времени упомянутых последовательностей импульсов с одновременной автоподстрой кой их фазы. 4 Предлагаемый способ осуществляется устройством, в которое введена цепочка из последовательно соединенных первого вспомогательного делителя частоты, коммутатора дли-тельности эталонных импульсов и формирователя эталонных импульсов, другая цепочка из последовательно соединенных блока добавления -и вычитания импульсов и второго делителя частоты и формирователь сигналов управления автоподстройкой, а блок фазового измерения снабжен дополнительным входом и тремя выходами, при этом входы первого вспомогательного делителя частоты и блока добавления, и вычитания импульсов подключены к выходам эталонного генератора, выход формирователя эталонных импульсов подключен к второму входу блока фазового измерения, выход второго делителя частоты подключен к третьему входу блока фазового измерения и второму входу формирователя эталонных импульсов, а выходы блока фазового измерения подключены к блоку регистрации и к входам форми|эователя сигналов управления автоподстройкой,выходы которого подключены к входам блока добавления и вычитания импульсов. Кроме того, блок регистрации содержит блок световой индикации, цифровой счетчик и формирователь импульсов индикаций, установленный на входе блока регистрации, к выходам которого подключены блок световой индикации и цифровой счетчик импульсов, позволяющие осуществить индикацию совпадения, опережения или отставания контролируемых импульсов относительно эталонных и автоматическую регистрацию .мгновенных угловых качаний ротора испытуемого электродвигателя, превьшающих установленный допусти.мый угол. На чертеже представлена блок-схема устройства для контроля угловых качаний ротора синхронного электродвигателя. Устройство содержит, последователь;но соединенные эталонный генератор 1 частоты, делитель 2 частоты, усилитель 3 мощности, соединенный выходами с обмотками синхронного двигателя k.. На валу двигателя установлен импульсный датчик 5 скорости, выход jKOTOporo через формирователь 6 контролируемых импульсов соединен с блоКОМ 7 фазового измерения. Последовательная цепь из последовательно соединенных первого вспомогательного делителя 8 частоты, коммутатора 9 длительности эталонных импульсов, формирователя 10 эталонных импульсов выход которого соединен со вторым входом блока 7фазового измерения. Другая последовательная цепь состоит из блока 11 добавления и вычитания импульсов и второго делителя 12 частоты, выход Которого .соединен с формирователем 10 и с третьим входом блока 7. Фэрмирователь 13 сигналов .управления автоподстройкой соединен выходами с блоком 11, а входами с блоком 7 и формирователем 1Ц импульсов индикации, выходы которого подключены к блоку световой индикации и цифровому счетчику импулъсов. Способ контроля угловых качаний реализуется в предлагаемом устройстве следующим образом. . Электродвигатель k получает питание от усилителя 3 синхронизированного от задающего эталонного гене ратора 1 через делитель 2 частоты. Задающий генератор генерирует тактовую частоту, величина которой определяет дискретность автоподстройки и точность регистрации угла качания. С датчика 5 формирователя 6 контроль ных импульсов на первый вход блока 7.фазового измерения подаются импульсы контрольной последовательности, частотакоторых пропорциональна частоте вращения ротора электродвигателя , а временная девиация соответ ствует закону угловых качаний ротора На второй вход блока 7 с выхода задающего генератора 1 через делитель 8частоты, коммутатор 9 длительности опорных импульсов и формирователь 10 опорных импульсов подается эталонная последовательность опорных импульсов длительность которых устанавливаеТСя коммутатором 9 и соответствует в масштабе времени величине допустимЬ, гр угла качания. На третий вход блока 8с выхода генератора 1 через блок 11добавления и вычитания импул сов и второй делитель 13 частот.ы подается пocлeдoвateльнocть прямоуголь ных импульсов (меандр), частота следования которых равна средней часто. те контрольных импульсов и мгновенной частоте опорных импульсов. Эта последовательность служит для опреде ления местоположения контрольных импульсов по отношению к опорным (отстают или опережают). Одновременно эта последовательность подается на второй вход формирователя 10 импульсов для осуществления жесткой привязки фронтов меандра и опорных импульсов. В предлагаемом устройстве применяется трехпозиционная система регулирования с воздействием на частоту путем добавления или вычитания импульсов, поступающих от задающего генератора 1, в устройстве добавления и вычитания импульсов. При по- ступлении на вход блока 7 контрольных импульсов производится оценка их синфазности с опорными импульсами, поступающими на другой вход селектора импульсов и на его выходах выделяются импульсы опережающие, отстающие или совпадающие с опорными импульсами. Эти импульсы подаются на три соответствующих входа формирователя 13 сигналов управления автоподстройкой. При поступлении на вход формирователя 13 импульса, опережающего опорный, на ег.о выходе формируется импульсный сигнал Добавление, и на время действия этой команды частота задающего генератора увеличивается в блоке 11 добавления и вычитания импульсов, в результате чего происходит перемещение во времени опорного импульса на величину действия команды Добавление и интервал опережения ликвидируется. При поступлении на вход формирователя 13 импульса, отстающего от опорного, на его другом выходе формируется импульсный сигнал Вычитание, и на время действия этой командыимпульсы от задающего генератора н.е поступают, запрещаются в блоке 11 и происходит обратное перемещение опорного импульса на временной оси на величину времени действия команды Вычитание. При поступлении на вход формирователя 13 импульса, совпадающего с опорным, сигналы управления на его выходах не формируются и через блок 11 частота задающего генератора проходит без изменения. Таким образом, происходит поцикловое отслеживание местоположения контрольных импульсов и каждая последующая оценка синфазности контрольного и опорного импульсов производится по результатам предыдущей оценки. Одновременно с выходов блока 7 импульсы опережения, отставания или совпадения подаются на три входа фор мирователя 1Л импульсов индикации, в которомсоответственно формируются информационные сигналы опережения, отставания или совпадения, поступающие на три Светоизлучающих диода блока 15 световой индикации и цифровой счетчик 16 импульсов, при этом совпадение во времени контрольного И опорного импульсов индицируется светодиодом Годен, а их несовпадение (опережение или отставание) двумя светодиодами Брак. Сметчик 16 импульсов регистрирует все импульсы несовпадения на установленный интервал времени. Таким образом, осуществляется регистрация мгновенных значений угло качания за один оборот ротора, как превышающих, так и не превышающих установленное допустимое значение, определяемое длительноет ью опорного импульса. : . -Предлагаемый способ и устройство упрощают операцию контроля, обеспечивают высокую точность и надежность измерения и регистрации результатов полностью исключают возможность выпуска продукции с отступлением от допустимых норм. При необходимости, процесс контроля можно полностью автоматизировать, используя для этой цели дополнительно цифропечатающее устройство. Формула изобретения 1 . Способ контроля угловых качани ротора синхронного электродвигателя при котором формируют временную последовательность контролируемых импульсов, определяемую мгновенной Частотой вращения ротора с временной девиацией, соответствующей закону угловых качаний ротора, сравнивают с эталонной временной последовательностью импульсов и выделяют разность фа.з между импульсами указанных последовательностей, пропорциональную мгновенным значениям угловых качаний ротора, отличающий с я тем, что, с целью упрощения процесса контроля и повышения точности импульсы эталонной временной последовательности фоомиоуют заданной дли 8 тельности, соответствующей в масштабе времени допустимому углу качания ротора, кратковременным изменением частоты следования эталонных импульсов добиваются совпадения их во .времени с последовательностью контроли- . руемых импульсов и автоматически регистрируют каждое несовпадение во времени упомянутых последовательностей импульсов с одновременной автоподстройкой их фазы. 2.Устройство ДЛИ осуществления спо,соба контроля угловых качаний ротора синхронного электродвигателя,содержащее соединенные последовательно эталонный ге нератор, делитель частоты, усилитель мощности, импульсный Датчик скорости вращения ротора синхронного электродвигателя, подключенный к входу формирователя контролируемых импульсов, выход которого соединен с первым входом блока фазового измерения, и блок регистрации, отличающееся тем, что, с целью упрощения процесса.контроля и повышения точности, в него введены цепочка из последовательно соединенных первого вспомогательного делителя частоты , коммутатора длительности эталонных импульсов и формирователя эталонных импульсов, другая цепочка из последовательно соединенных блока добавления и вычитания импульсов и второго делителя частоты, формирователь сигналов управления автоподстройкой, а блок фазового измер ения снабжен дополнительным входом и тремя выходами, при этом входы первого вспомогательного делителя частоты и блока добавления и вычитания имлульсов подключены к выходам эталонного генератора, выход формирователя эталонных импульсов подключен к второму входу блока фазового измерения, выход второго делителя часто- . ты подключен к третьему входу блока фазового измерения и второму входу формирователя эталонных импульсов, а выходы блока-фазового измерения подключены к блоку регистрации и к входам формирователя сигналов управления автоподстройкой, выходы которого подключены к входам блока добавления и вычитания импульсов. 3. Устройство для осуществления способа ПОП.2, отличающеес я тем, что блок регистрации содержит блок световой индикации, цифровой счетчик и формирователь импульсов индикации, установленный на входе блока регистрации, к выходам котооог6 подключены блок световой инди- 5 нации и цифровой счетчик импульсов. 9170 Источники информации, принятые во внимание при экспертизе 1.Труды Ленинградского института точной механики и оптики. 197, вып. 78, с. 60-69. 2.Авторское свидетельство СССР № 178181, кл. С 01 Р г/, 1966.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения угловых качаний ротора электродвигателя | 1990 |
|
SU1776984A1 |
| Устройство для измерения мгновенной частоты вращения ротора гистерезисного электродвигателя | 1982 |
|
SU1120243A1 |
| УСТРОЙСТВО КОНТРОЛЯ СИНХРОНИЗМА КОЛЬЦА ФАЗОВОЙ АВТОПОДСТРОЙКИ ЧАСТОТЫ | 1993 |
|
RU2057395C1 |
| Устройство для согласования углового положения синхронно-вращающихся валов электродвигателей постоянного тока | 1983 |
|
SU1100700A1 |
| Устройство для измерения преобладаний двоичных сигналов | 1985 |
|
SU1246396A1 |
| Способ определения угловых качаний ротора электродвигателя и устройство для его осуществления | 1986 |
|
SU1364861A1 |
| Устройство для измерения преобладаний двоичных сигналов | 1986 |
|
SU1338102A2 |
| Устройство цифровой фазовой автоподстройки частоты | 1982 |
|
SU1125748A1 |
| Двухступенчатый регенератор | 1983 |
|
SU1197117A1 |
| Устройство для измерения скорос-Ти ВРАщЕНия АСиНХРОННОгО дВигА-ТЕля | 1978 |
|
SU794527A1 |
