САд
Од 4
эо
О)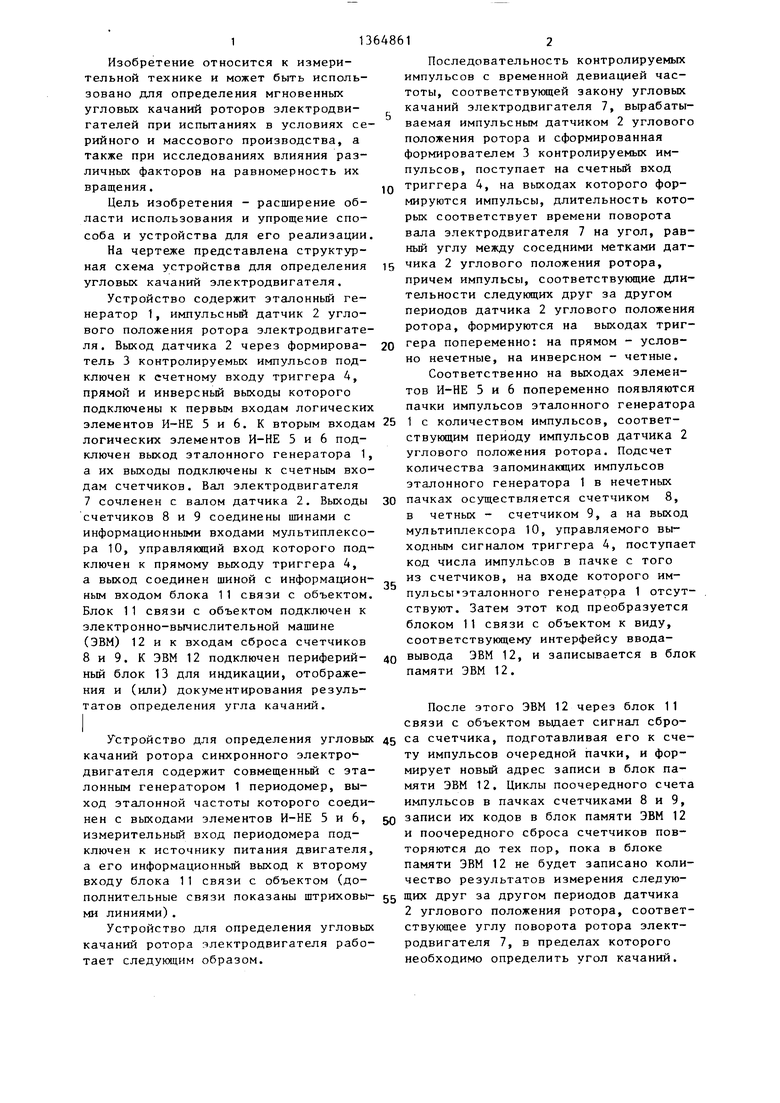
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения угловых качаний ротора электродвигателя | 1990 |
|
SU1776984A1 |
| Устройство для измерения скорости вращения | 1984 |
|
SU1262385A1 |
| Способ контроля угловых качаний ротора синхронного электродвигателя и устройство для его осуществления | 1980 |
|
SU917084A1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОБНАРУЖЕНИЯ И САМОНАВЕДЕНИЯ | 2010 |
|
RU2439608C1 |
| Преобразователь фаза-код | 1985 |
|
SU1298686A1 |
| Устройство для регулирования скорости электродвигателя | 1984 |
|
SU1267375A1 |
| Устройство для функционального контроля интегральных схем | 1988 |
|
SU1737465A1 |
| ИМИТАТОР УГЛА ПОВОРОТА АНТЕННЫ РЛС | 1987 |
|
SU1841003A1 |
| Устройство для управления многоканальным электроприводом тренажера | 1984 |
|
SU1180846A1 |
| Логическое запоминающее устройство | 1983 |
|
SU1140172A1 |
Изобретение относится к измерительной технике и может быть использовано для определения мгновенных угловых качаний роторов электродвигателей. Целью изобретения является расширение области использования и упрощение способа и устройства для его реализации. Расчет угловых качаний ротора производится при равномерной дискретизации по углу и неравномерной дискретизации по времени накопленных значении угла качаний в пределах заданного угла поворота ротора. Дополнительно измеряют период частоты питающего двигатель напряжения и рассчитьшают накопленные значения угла качаний. Последовательт ность импульсов с временной девиацией частоты, соответствующей закону угловых качаний ротора электродвигателя, вырабатьюается датчиком 2 углового положения ротора электродвигателя 7. На выход мультиплексора 10 поступает код числа импульсов в пачке с того счетчика, на входе которого импульсы эталонного генератора 1 отсутствуют. Код поступает в память ЭВМ 12, где рассчитывается значение угла качаний в каждой точке в пределах заданного угла. При определении угловых качаний ротора синхронного двигателя периодо- мер 1, выполняющий функцию эталонного генератора, измеряет, кроме того, частоту питающего электродвигатель 7 напряжения. 2 с. и 2 з.п. ф-лы, 1 ил. (Л
1
Изобретение относится к измерительной технике и может быть использовано для определения мгновенных угловых качаний роторов электродвигателей при испытаниях в условиях серийного и массового производства, а также при исследованиях влияния различных факторов на равномерность их вращения.
Цель изобретения - расширение области использования и упрощение способа и устройства для его реализации.
На чертеже представлена структурПоследовательность контролируем импульсов с временной девиацией ча тоты, соответствующей закону углов качаний электродвигателя 7, выраба ваемая импульсным датчиком 2 углов положения ротора и сформированная формирователем 3 контролируемых им пульсов, поступает на счетный вход ,Q триггера 4, на выходах которого фо мируются импульсы, длительность ко рых соответствует времени поворота вала электродвигателя 7 на угол, р ный углу между соседними метками д
ная схема устройства для определения is чика 2 углового положения ротора.
угловых качаний электродвигателя.
Устройство содержит эталонньй генератор 1, импульсный датчик 2 углового положения ротора электродвигателя. Выход датчика 2 через формирователь 3 контролируемых импульсов подключен к счетному входу триггера 4, прямой и инверсный выходы которого подключены к первым входам логических
элементов И-НЕ 5 и 6. К вторым входам 25 1 с количеством импульсов, соответ- логических элементов И-НЕ 5 и 6 под- ствующим периоду импульсов датчика 2 ключен выход эталонного генератора 1, углового положения ротора. Подсчет
а их выходы подключены к счетным входам счетчиков. Вал электродвигателя
7сочленен с валом датчика 2. Выходы счетчиков 8 и 9 соединены шинами с информационными входами мультиплексора 10, управляющий вход которого подключен к прямому выходу триггера 4,
а выход соединен шиной с информационным входом блока 11 связи с объектом. Блок 11 связи с объектом подключен к электронно-вычислительной машине (ЭВМ) 12 и к входам сброса счетчиков
8и 9. К ЭВМ 12 подключен периферийный блок 13 для индикации, отображения и (или) документирования результатов определения угла качаний.
количества запоминающих импульсов эталонного генератора 1 в нечетных
30 пачках осуществляется счетчиком 8, в четных - счетчиком 9, а на выход мультиплексора 10, управляемого выходным сигналом триггера 4, поступает код числа импульсов в пачке с того из счетчиков, на входе которого им- пульсы эталонного генератора 1 отсутствуют. Затем этот код преобразуется блоком 11 связи с объектом к виду, соответствующему интерфейсу ввода40 вывода ЭВМ 12, и записывается в блок памяти ЭВМ 12.
35
После этого ЭВМ 12 через блок 11 связи с объектом выдает сигнал сбро- Устройство для определения угловых 45 счетчика, подготавливая его к сче- качаний ротора синхронного электро- ту импульсов очередной пачки, и формирует новый адрес записи в блок памяти ЭВМ 12, Циклы поочередного счета импульсов в пачках счетчиками 8 и 9, 50 записи их кодов в блок памяти ЭВМ 12 и поочередного сброса счетчиков повторяются до тех пор, пока в блоке памяти ЭВМ 12 не будет записано количество результатов измерения следую- полнительные связи показаны штриховы- 55 Щ ДРУГ за другом периодов датчика ми линиями).2 углового положения ротора, соответУстройство для определения угловых ствующее углу поворота ротора элект- качаний ротора электродвигателя рабо- родвигателя 7, в пределах которого тает следующим образом.необходимо определить угол качаний.
двигателя содержит совмещенный с эта- лонньм генератором 1 периодомер, выход эталонной частоты которого соединен с выходами элементов И-НЕ 5 и 6, измерительный вход периодомера подключен к источнику питания двигателя, а его информационньй выход к второму входу блока 11 связи с объектом (до.
648612
Последовательность контролируемых импульсов с временной девиацией частоты, соответствующей закону угловых качаний электродвигателя 7, вырабатываемая импульсным датчиком 2 углового положения ротора и сформированная формирователем 3 контролируемых импульсов, поступает на счетный вход ,Q триггера 4, на выходах которого формируются импульсы, длительность которых соответствует времени поворота вала электродвигателя 7 на угол, равный углу между соседними метками датпричем импульсы, соответствующие длительности следующих друг за другом периодов датчика 2 углового положения ротора, формируются на выходах триг- гера попеременно: на прямом - условно нечетные, на инверсном - четные.
Соответственно на выходах элементов И-НЕ 5 и 6 попеременно появляются пачки импульсов эталонного генератора
количества запоминающих импульсов эталонного генератора 1 в нечетных
пачках осуществляется счетчиком 8, в четных - счетчиком 9, а на выход мультиплексора 10, управляемого выходным сигналом триггера 4, поступает код числа импульсов в пачке с того из счетчиков, на входе которого им- пульсы эталонного генератора 1 отсутствуют. Затем этот код преобразуется блоком 11 связи с объектом к виду, соответствующему интерфейсу вводавывода ЭВМ 12, и записывается в блок памяти ЭВМ 12.
Далее ЭВМ 12 рассчитывает значение угла качаний в каждой точке в пределах заданного угла и в зависимости от того, какие характеристики угловых качаний следует определить, обрабатывает полученные значения углов качаний по алгоритму, обеспечивающему определение этих характеристик, выводит на периферийный блок 13 предусмотренную алгоритмом работы информацию о соответствии угловых качаний ротора допустимым значениям, значение максимального угла качаний и (или)
график (таблицу) изменения угла кача- ig алгоритмом, обеспечивающим определении в пределах заданного угла.
При определении угловых качаний ротора синхронного электродвигателя 7 с целью повышения точности периодо- мер, выполняющий также функцию эта- лонного генератора 1, измеряет, кроме того, период частот питающего электродвигатель 7 напряжения. Код периода через блок 11 связи с объектом записывается в блок памяти ЭВМ 12, кото- рая рассчитывает уже не выборочное, а генеральное среднее значение периода датчика 2 положения ротора электродвигателя 7.
Формула изобретения 1 . Способ определения угловых качаний ротора электродвигателя, заключающийся в том, что формируют временную последовательность импульсов, определяемую мгновенной угловой скоростью ротора с временной девиацией, соответствующей закону угловьк качаний ротора, и эталонную измерительную временную последовательность, отличающийся тем, что, с целью расширения области использования и упрощения, измеряют периоды следования контролируемых импульсов и рассчитывают при равномерной дискретизации по углу и неравномерной дискретизации по времени накопленные значения угла качаний в пределах заданного угла поворота ротора по формуле
. 360.. . Лв/, -(i-),
аа - отклонение угла поворота в конце i-ro интервала от среднего угла поворота на
3601 угол ---, град;
К - количество контролируемых импульсов на один оборот;
i - номер интервала;
Т. - измеренное значение периода следования контролируемых импульсов, с;
п - количество контролируемых импульсов при повороте ротора на угол, в пределах которого определяют угол качаний,
затем обрабатывают полученные значения углов качаний в соответствии с
0 5
0
5
ние заданных характеристик угловых качаний и фиксируют их.
значения угла качаний по.формуле
1
КП Т ;
л, ---(i -- ),
где Р - число пар полюсов синхронного
электродвигателя;
Т - период частоты питающего напряжения, с.
0 которого подключен к выходу второго элемента И-НЕ, вход первого счетчика импульсов подключен к выходу первого элемента И-НЕ, и последовательно соединенные мультиплексор, информационg ные входы которого подключены к выходам счетчиков, а управляющий вход - к одному из выходов триггера, блок срязи с объектом, электронно-вычислительную машину и периферийный блок.
0
51364861б
выходы блока связи с объектом подклю- повьппения точности, в него дополни- чены к входам сброса первого и второ- тельно введен периодомер, вход кото- го счетчиков.рого подключен к источнику питания
4, Устройство поп.З, отли- электродвигателя, а выход - к блоку
чающееся тем, что, с целью связи с объектом.
| СПОСОБ ИЗМЕРЕНИЯ НЕСТАБИЛЬНОСТИ СКОРОСТИВРАЩЕНИЯ | 0 |
|
SU178184A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ контроля угловых качаний ротора синхронного электродвигателя и устройство для его осуществления | 1980 |
|
SU917084A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
