Известны шнаговые манипуляторы, содержащие штангу, раснололсенную в шаровой опоре, рукоятку управления и исполнительный механизм, взаимодействие между которыми осуществляется с помощью гибких связей (трос или лента). В таких манипуляторах гибкая связь при эксплуатации быстро выходит из строя.
Особенность описываемого манипулятора состоит в том, что в пем связь между исполнительным механизмом и рукояткой управления выполнена в виде жестких независимых соединений элементов рукоятки с элементами исполнительного механизма, состоящих из расположенных по обе сторопы соединительной штанги карданных механизмов, расположенных одии в другом.
При таком выполнении манипулятора обеспечивается передача исполнительному механизму движений качания в любом направлении, а также повышается надежность и легкость управления.
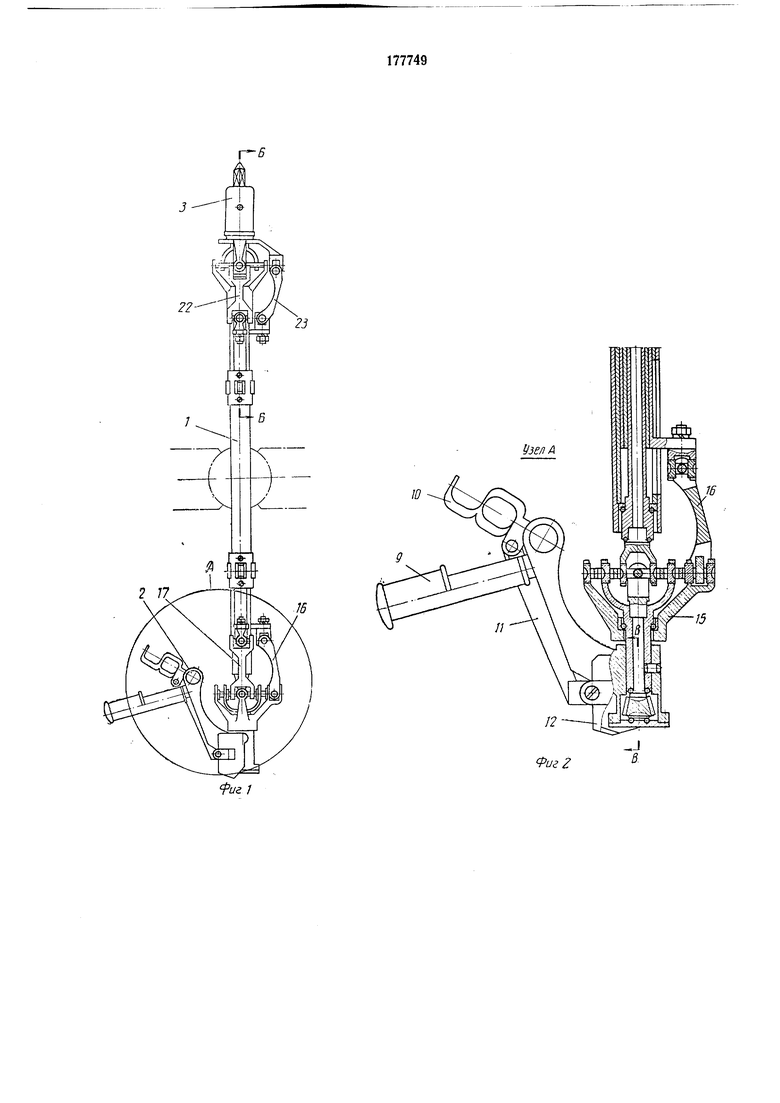
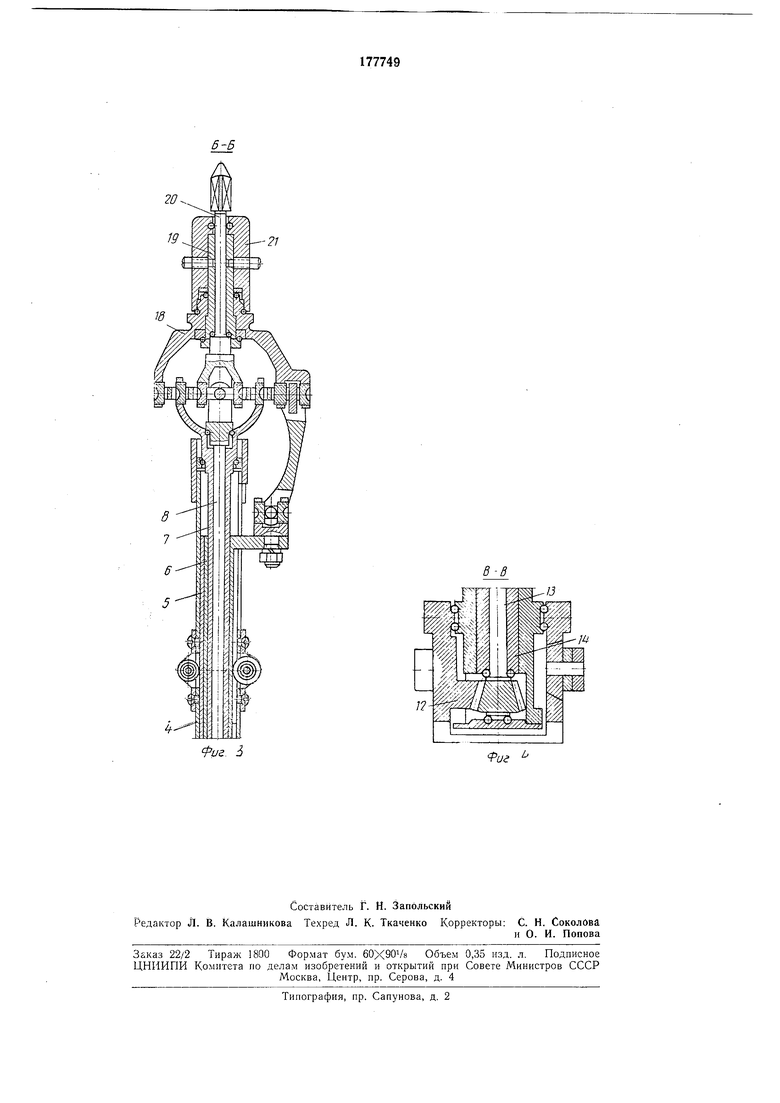
На фиг. 1 показан общий вид манипулятора; на фиг. 2 - рукоятка управления (узел А на фиг. 1); на фиг. 3 - разрез манипулятора по липии Б-Б па фиг. 1; на фиг. 4 - разрез по линии В-В на фиг. 2.
Шпаговый манипулятор состоит из следующих основных элементов: трубчатой телескопической штанги 1, расположенной па шаровой или какой-либо другой опоре, рукоятки управления 2, исполнительного механизма 3. Внутри корпуса 4 штанги / проходят: трубы 5 и 6 пространственного качания исполнительного механизма, труба 7 механизма вращения инструмента и вал 8 механизма вращения зажимпого наконечника.
Штанга / и находящиеся в ней трубы 5, 6 и 7 и вал 8 по обоим концам снабжены вилками, которые через промежуточные кольца (на чертеже не показаны) соединены с соответствующими вилками рукоятки управления и исполнительного механизма.
Рукоятка управления включает рукоятку 9
оператора, рычаг 10, тягу 11 и конический сектор 12, вал-шестерни 13, трубу 14 и корпус 15. Корпус рукоятки управления, вал-шестерни 13 и труба 14 имеют вилки кардана, которые соединяют с корпусом 4, трубой 7 и валом 8.
С корпусом рукоятки управления шарпирно соединены две тяги 16 и 17 (расположенные в плоскостях под углом 90), которые с другой стороны соответственно шарнирпо прикреплены к трубам 5 и б штанги /.
Р1сполнптельный механизм состоит из корпуса 18, трубы 19 и вала 20, которые с помои№Ю вилок соединены с вилками корпуса 4, трубы 7 и вала 8. На вал 20 падет квадрат (на чертежах не показан), который входит в кваддинена со стаканом 21, на который надевается сменный инструмент.
С корпусом 18 шарнирно соединены две тяги 22 и 23, которые другим концом шарнирно прикреплены к трубам 5 и 6 штанги.
Манипулятором осуш;ествляется вращение зажимного наконечника и инструмента, качание кисти в любом направлении, качание самого манипулятора в шаровой или какой-либо другой опоре и поступательное движение штанги в опоре.
Враш,ение зажимному наконечнику передается от рычага JO через тягу 11, конический сектор 12, вал 13, шарнир кардана, вал 8, шарнир кардана, вал 20.
Инструмент врашается от рукоятки 9, связанной с трубой 14, через шарнир кардана движение передается трубе 7, далее через шарнир кардана трубе 19 и стакапу 21.
Качание кисти в плоскости чертежа (см. фиг. I) передается от корпуса тяге 16 через поступательно движуш;уюся трубу 5, тягу 22 на корпус 18 исполнительного механизма.
При качании кисти в перпендикулярной плоскости чертежа движение передается от корпуса 15 тяге 17, через поступательно движушуюся трубу и тягу 23 корпусу исполнительного механизма. Качание кисти в любой другой плоскости происходит в результате одновременного перемещения тяг 16, 17, труб 5, 5 и тяг 22, 23. Движение качания манипулятора, вращение его в опоре, а также поступательное движение в ней зависят от конструкции опоры.
Предмет изобретения
Шпаговый манипулятор, содержаший исполнительный механизм, рукоятку управления и пустотелую соединительную штангу, расположенную в щаровой опоре, отличающийся тем, что, с целью обеспечения движения исполнительпого механизма в любом направлении и повышения надежности и легкости управления, в нем связь между исполнительным механизмом и рукояткой управления выполнена в виде расположенных внутри пустотелой штанги тяги и концентричных труб, соединяющих элементы рукоятки с соответствующими элементами исполнительного механизма при помощи карданных механизмов, расноложенпых один в другом.
20
19
-21
,
иг. J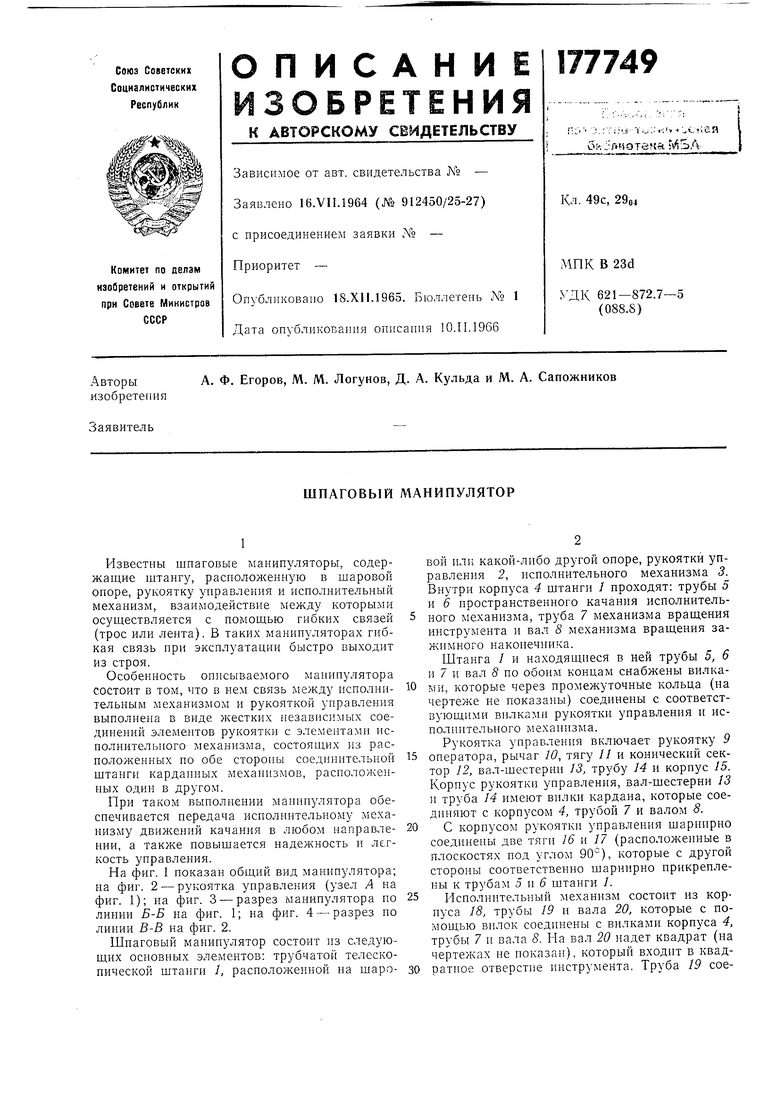
| название | год | авторы | номер документа |
|---|---|---|---|
| Шпаговый манипулятор | 2018 |
|
RU2691349C1 |
| Шпаговый манипулятор | 2018 |
|
RU2691174C1 |
| Шпаговый манипулятор | 2018 |
|
RU2691172C1 |
| Шпаговый манипулятор | 2018 |
|
RU2691170C1 |
| Шпаговый манипулятор | 2018 |
|
RU2691352C1 |
| Шпаговый манипулятор | 2018 |
|
RU2691171C1 |
| ШПАГОВЫЙ МАНИПУЛЯТОР | 2019 |
|
RU2724735C1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ КОРОБКИ ПЕРЕДАЧ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2546915C2 |
| ШПАГОВЫЙ МАНИПУЛЯТОР | 2018 |
|
RU2718771C1 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |