Изобретение относится к управ- лению электрическими машинами и может быть использовано в системах управления шаговыми двигателями в прецизионных дискретных электроприводах.
Цель изобретения - повышение точности определения положения подвижного элемента шагового двигателя. На Фиг. 1 приведена блок-схема предлагаемого устройства; на фиг. 2- диаграммы, поясняющие работу устройства; на фиг. 3 - блок-схема делителя напряжений.
Устройство для определения положения подвижного элемента шагового двигателя содержит блок 1 (фиг. 1) формирования фазового состояния результирующей ЭДС движения, соединенный входами с обмотками 2-5 шагового двигателя 6 и состоящий из выделителя 7 ЭДС движения в фазах, соединенного выходами с функциональным преобразователем 8, включающим в себя блоки многоканальных аналоговых коммутаторов и компараторов и имеющим четыре выхода 9-12. Выходы 9 и 10 преобразователя 8 соединены с входами делителя 13 напряжений. Выход 11 является информационным выходом устройства, а выход 12 подключен к управляющему входу блока 14 формирования опорного сигнала, имеющего информационный выход 15, являющийся также информационным выходом устройства, и другой выход 16, связанный с одним из входов блока 17 сравнения, второй вход которого связан с выходом делителя 13. Выход блока 17 является стробирующим выходом устройства. Блок 14 формирования опорного сигнала содержит последовательно соединенные таймер 18, счетчик 19, информационный выход которого является информационным выходом 15 блока 14, постоянное запоминающее устройство 20, вход которого является управляющим входом блока 14, и цифроаналоговый преобразователь 21, выход которого является выходом блока 14. Делитель 13 построен на основе усилителя 22.
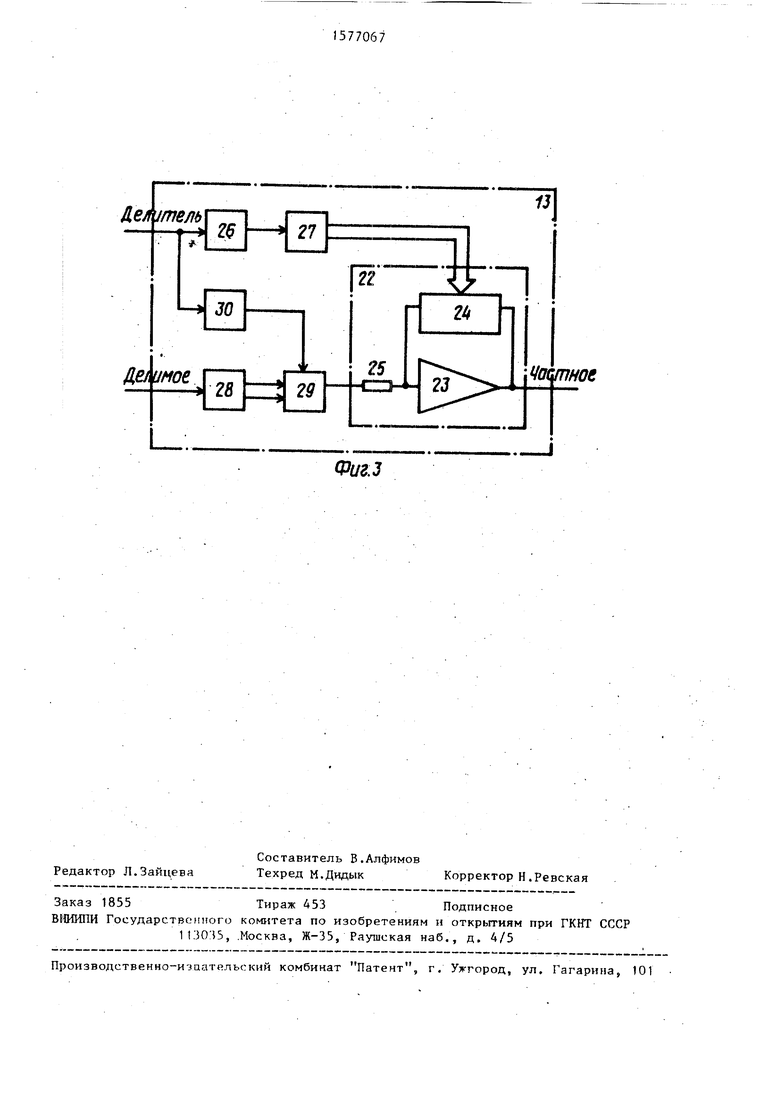
Так как значения ЭДС обмоток Ј1 и Јл могут быть положительны и отрицательны, для формирования их отношений применяется 4-квадрантный делитель. Собственно делитапем является операционный усилитель 23, охваченный цепью обратной связи, содержащей управляемый резистор на основе умножающего цифроаналогового преобразователя (ПАП) 24. К входу усилителя 23 подключен постоянный масштабирующий резистор 25. Вход Делитель блока 13 через двухполу- периодный выпрямитель 26 и аналоге-
цифровой преобразователь (АЦП) 27 соединен с входом ЦАП 24. Вход Делимое блока 13 через усилитель 28 с парафазными выходами соединен с входами коммутатора 29, выход которого подключен к резистору 25, а управляющий вход через компаратор 30 связан с входом Делитель.
Устройство работает следующим образом.
В процессе движения подвижного элемента двигателя 6 на обмотках 2-5 наводятся ЭДС, которые после выделения из суммарных сигналов обмоток 2-5 формируются на выходе
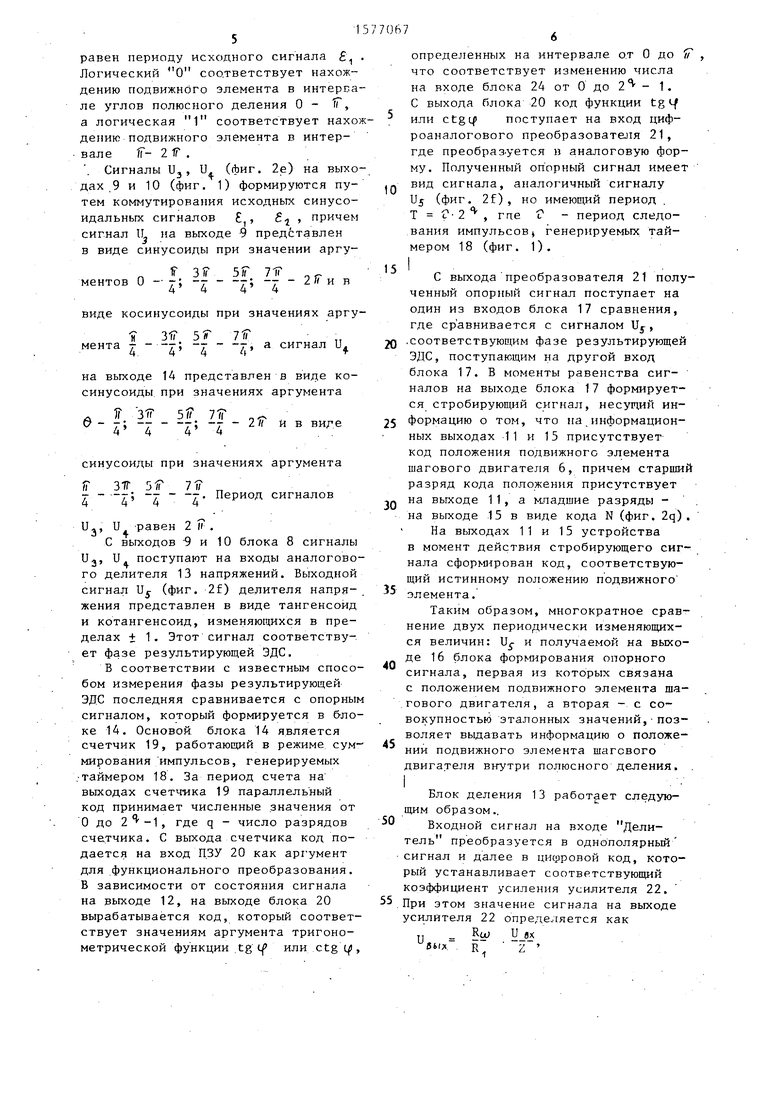
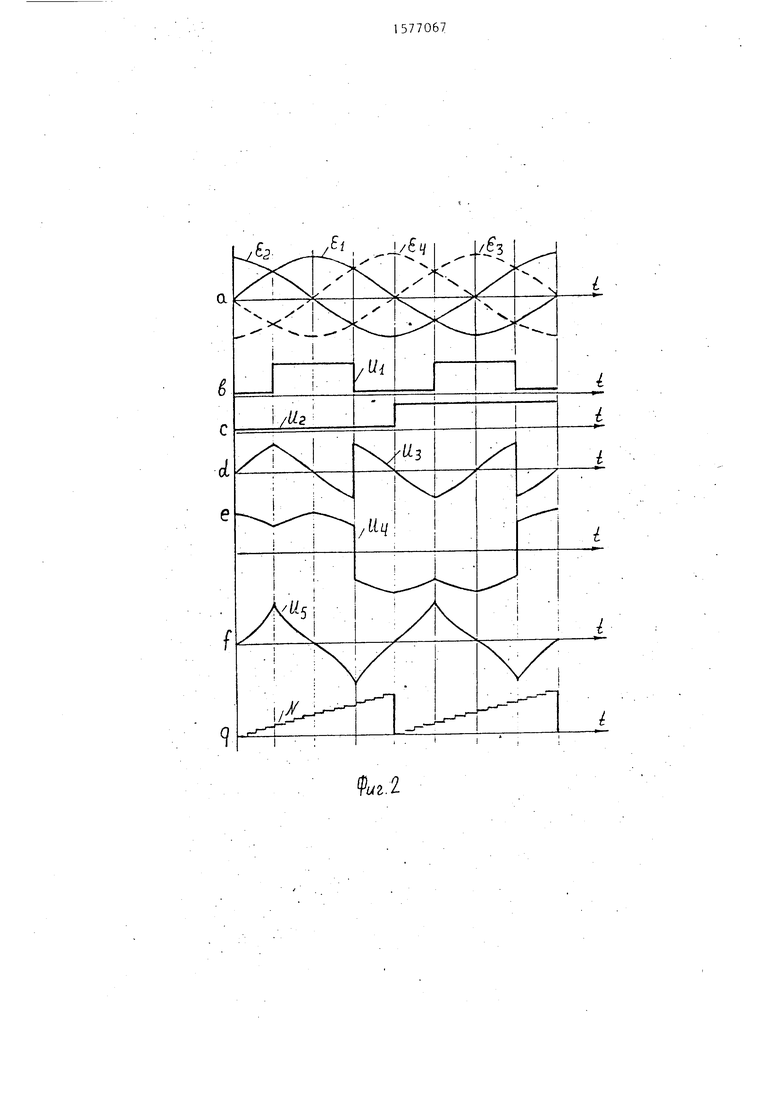
выделителя 7 в виде четырех синусоидальных сигналов Ј, , Јг , Ј3 , Ј-4 (фиг.2а), сдвинутых относительно
друг друга на угол -. Отсчет фаз углов на диаграмме принят от сигнала Ј, .
В функциональном преобразователе 8 сигналы Ј, , Ј4, Ј3 , Ј4 (фиг.2а) преобразуются в четыре периодических сигнала: два дискретных Ut, Uz и два аналоговых U3, U4 (фиг. 2в-е) . Дискретный сигнал на выходе 12 формируется путем амплитудного сравнения двух однополярных,.сдвинутых один
относительно другого на - сигналов,
полученных путем предварительного коммутирования исходных сигналов Ј1 Ј«t Ј3 Сигнал на выходе 12 имеет период, равный половине периода изменения сигналов Ј,, Ј4 , Ј3 , Ј4 Когда его значение представлено в виде логического О, то блок 4 формирует сигнал, соответствующий фазе опорного сигнала, имеющий вид функции tg , а когда в виде логической 1, то формируется сигнал, соответствующий фазе опорного сигнала, имеющий вид функции
ctg Ц . Дискретный сигнал Uz(фиг. 2с) на выходе 11 формируется путем амплитудного сравнения сигнала Ј, с нулевым уровнем. Период сигнала иг
равен периоду исходного сигнала Ј1 . Логический О соответствует нахождению подвижного элемента в интервале углов полюсного деления 0 - ТГ, а логическая 1 соответствует нахождению подвижного элемента в интервале 1Г- 2 7Г .
. Сигналы иэ , U. (фиг. 2е) на выходах 9 и 10 (фиг. 1) формируются путем коммутирования исходных синусоидальных сигналов Ј , Ј , причем сигнал U на выходе 9 представлен в виде синусоиды при значении аргу F 3if 5F 71Г ментов 0 - -; -г - -т т и в
виде косинусоиды при значениях аргу 31 51Г 7F
7 - г -г - --г. а сигнал IL А 44 4
мента
на выходе 14 представлен в виде косинусоиды при значениях аргумента
л 5 3ff 5lf 7 „,-,
0- 45 4 4; 4 2 И В ВИГ6
синусоиды при значениях аргумента
ЗТ 45
51Г
7/
т. Период сигналов
U3, U равен 2 I .
С выходов 9 и 10 блока 8 сигналы U3, U поступают на входы аналогового делителя 13 напряжений. Выходной сигнал (фиг. 2f) делителя напряжения представлен в виде тангенсоид и котангенсоид, изменяющихся в пределах + 1. Этот сигнал соответствует фазе результирующей ЭДС.
В соответствии с известным способом измерения фазы результирующей ЭДС последняя сравнивается с опорным сигналом, который формируется в блоке 14. Основой блока 14 является счетчик 19, работающий в режиме суммирования импульсов, генерируемых таймером 18. За период счета на выходах счетчика 19 параллельный код принимает численные значения от О до , где q - число разрядов счетчика. С выхода счетчика код подается на вход ПЗУ 20 как аргумент для функционального преобразования. В зависимости от состояния сигнала на выходе 12, на выходе блока 20 вырабатывается код, который соответствует значениям аргумента тригонометрической функции tg Lf или ctgq,
0
5
0
5
0
5
0
5
определенных на интервале от 0 до If что соответствует изменению числа на входе блока 24 от 0 до 2 - 1. С выхода блока 20 код функции tg Lf или ctgLf поступает на вход циф- роаналогового преобразователя 21, где преобразуется в аналоговую форму. Полученный опорный сигнал имеет вид сигнала, аналогичный сигналу U-5 (фиг. 2f) , но имеющий период Т С- 2 , где Г - период следования импульсов генерируемых таймером 18 (фиг. 1).
С выхода преобразователя 21 полученный опорный сигнал поступает на один из входов блока 17 сравнения, где сравнивается с сигналом , .соответствующим фазе результирующей ЭДС, поступающим на другой вход блока 17. В моменты равенства сигналов на выходе блока 17 формируется стробирующий сигнал, несущий информацию о том, что на информационных выходах 11 и 15 присутствует код положения подвижного элемента шагового двигателя 6, причем старший разряд кода положения присутствует на выходе 11, а младшие разряды - на выходе 15 в виде кода N (фиг. 2q) .
На выходах 11 и 15 устройства в момент действия стробирующего сигнала сформирован код, соответствующий истинному положению подвижного элемента.
Таким образом, многократное сравнение двух периодически изменяющихся величин: Uj- и получаемой на выходе 16 блока формирования опорного сигнала, первая из которых связана с положением подвижного элемента шагового двигателя, а вторая - с совокупностью эталонных значений, позволяет выдавать информацию о положении подвижного элемента шагового двигателя внутри полюсного деления.
Блок деления 13 работает следующим образом..
Входной сигнал на входе Делитель преобразуется в однополярный сигнал и далее в цисрровой код, который устанавливает соответствующий коэффициент усиления усилителя 22.
При этом значение сигнала на выходе усилителя 22 определяется как Rw U к
U
вб/л
R
1577067
р
г - «вхгде Rw - полное сопротивление умно- жающего цифроаналогового преобразователя; масштабирующее сопротивление;
управляющий код; входное значение напряжения на входе Делитель. Точность деления, выполняемая -этой схемой, определяется дрейфом нуля устителя 23 и числом разрядов аналого-цифрового и цифроаналогового преобразователей (24 и 27). Нелинейные свойства этой схемы во всем диапазоне входных сигналов незначительны. Благодаря использованию изобретения снижается ограничение по количеству информационных точек отсчета положения на шаговом интервале, что повышает точность управления движением. Точность определения положения не зависит от амплитуды составляющих результирующей ЭДС вращения, а от их отношения. Это обстоятельство дает преимущество при применении устройства в электроприводах, расчи- танных на работу в широком диапазоне скоростей движения, а в планарном линейном приводе устраняет дополнительную зависимость амплитуды составляющих ЭДС от нестабильности воздушного зазора между якорем и индуктором. Устройство инвариантно к кон- с грукции исполнительного двигателя и виду движения. Это объясняется тем, что шаговые двигатели с ортогональным пространственным расположением фаз выпускаются промышленностью во вращательном, линейном и планарном конструктивных исполнениях.
Формула изобретения
1. Устройство для определения положения подвижного элемента шаго
0
5
0
5
0
5
0
8
вого двигателя с ортогонально расположенными обмотками, содержащее блок формирования сигнала фазового состояния результирующей ЭДС движения, состоящий из выделителя ЭДС движения в фазах и аналогового делителя напряжений, блок опорного сигнала, состоящий из таймера, счетчика импульсов, постоянного запоминающего устройства и цифроаналогового преобразователя, и блок сравнения, включающий формирователь v стробирующего импульса, отличающееся тем, что, с целью повышения точности определения положения путем увеличения разрешающей способности, в блок формирования фазового состояния результирующей ЭДС движения дополнительно введен (функциональный преобразователь, входы которого подключены к выходам выделителя ЭДС движения в фазах, аналоговые выходы подключены к входам делителя напряжений, а один дискретный выход связан с управляющим входом постоянного запоминающего устройства.
2. Устройство по п. отличающееся тем, что аналоговый делитель напряжений включает в себя компаратор, усилитель с дискретно- управляемым коэффициентом усиления, цепь управления усилением, состоящую из последовательно соединенных двухполупериодного выпрямителя и аналого-цифрового преобразователя, и входную цепь усилителя, состоящую из последовательно включенных коммутатора и парафазного усилителя с единичным коэффициентом передачи, причем вход управления коммутатором через компаратор напряжения связан с входом двухполулериодного выпрямителя.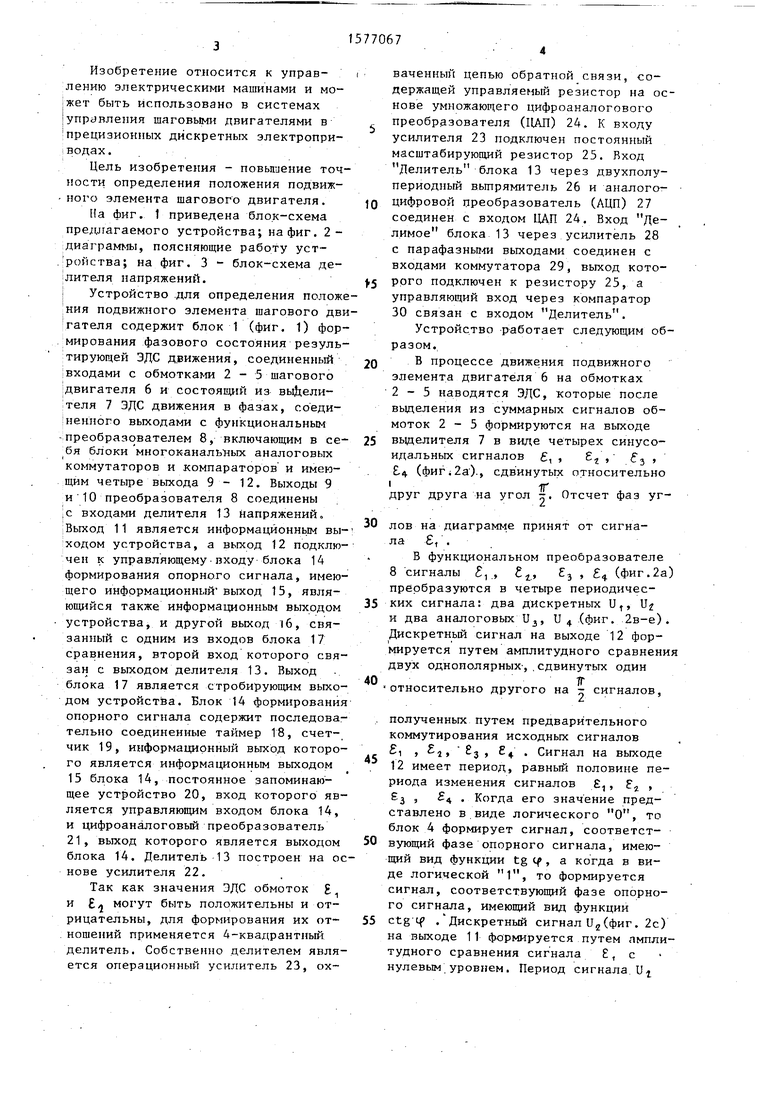
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ калибровки синфазно-квадратурного преобразователя | 1989 |
|
SU1677682A1 |
| Устройство для определения положения подвижного элемента шагового двигателя | 1990 |
|
SU1812611A2 |
| Способ калибровки линейности цифроаналоговых преобразователей | 1989 |
|
SU1755373A1 |
| Устройство для позиционирования магнитных головок записи - воспроизведения | 1989 |
|
SU1679545A1 |
| Замкнутый шаговый электропривод | 1988 |
|
SU1511840A2 |
| Устройство для регулирования скорости электродвигателя | 1984 |
|
SU1267375A1 |
| Калибратор сигналов, нормированных по коэффициенту гармоник | 1988 |
|
SU1555677A1 |
| Формирователь частотно-модулированных сигналов | 1990 |
|
SU1732420A1 |
| Устройство для управления шаговым двигателем с дроблением шага | 1986 |
|
SU1403332A1 |
| СПОСОБ ПРОГРАММНОГО УПРАВЛЕНИЯ ШАГОВЫМ ПЕРЕМЕЩЕНИЕМ ПОСРЕДСТВОМ ШАГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
SU1795861A1 |
Изобретение относится к электротехнике и может быть использовано в системах управления шаговыми двигателями в прецезионных дискретных электроприводах. Цель изобретения - повышение точности определения положения подвижного элемента путем увеличения разрешающей способности. Устройства содержит блок 1 формирования сигнала фазового состояния результирующей ЭДС движения, блок 14 опорного сигнала, блок 17 сравнения и формирования стробирующего импульса, делитель 13 напряжений. Устройство обеспечивает формирования функции фазового состояния в виде тангенса или котангенса в зависимости от угла так, что величина функции не превышает единицы. 1 з.п. ф-лы, 3 ил.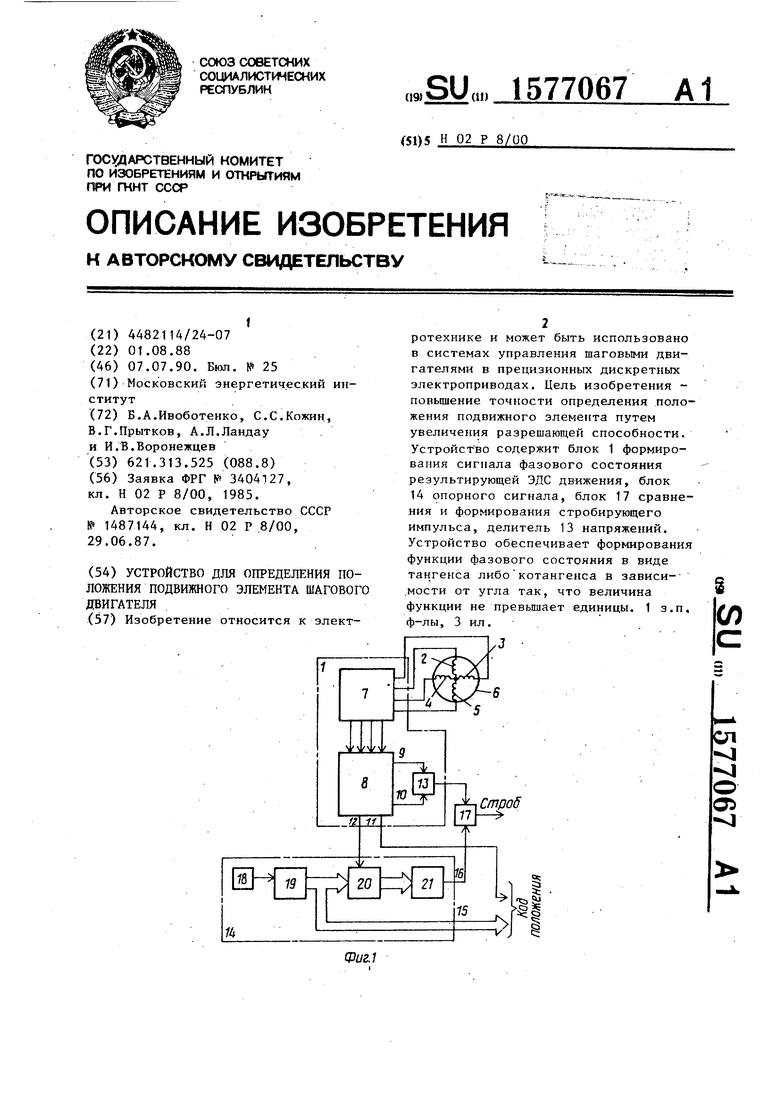
W2
Фиг.з
ЧйШПНОС
| Заявка ФРГ N 3404127, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР № 1487144, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
